Brigham Young University
BYU ScholarsArchive
All Theses and Dissertations
2004-11-19
Compliant Mechanisms to Perform Bearing and
Spring Function in High Precision Applications
Jesse R. Cannon
Brigham Young University - Provo
Follow this and additional works at: https://scholarsarchive.byu.edu/etd
Part of the Mechanical Engineering Commons
BYU ScholarsArchive Citation
Cannon, Jesse R., "Compliant Mechanisms to Perform Bearing and Spring Function in High Precision Applications" (2004). All Theses
and Dissertations. 229.
https://scholarsarchive.byu.edu/etd/229
This Thesis is brought to you for free and open access by BYU ScholarsArchive. It has been accepted for inclusion in All Theses and Dissertations by an
authorized administrator of BYU ScholarsArchive. For more information, please contact scholarsarchive@byu.edu, ellen_amatangelo@byu.edu.
CHAPTER 1
1
INTRODUCTION
1.1 BACKROUND
Bearings and springs are traditional mechanical elements commonly used in
machine design. Springs are used to provide energy storage or reaction to a force or
torque. Bearings use either sliding contact or rolling elements to constrain lateral
translation while allowing rotation between two rigid parts. Sliding contact bearings such
as bushings are composed of as few as two parts, making them simple to manufacture and
assemble. There can be a good deal of energy loss, however, due to friction between the
sliding surfaces. Rolling-element bearings have much lower friction, yet typically have
from 10 to 30 parts, increasing manufacturing costs and assembly time. Both types of
bearings usually need lubrication to reduce friction and remove heat. They also suffer
from backlash [1].
An increasing number of mechanical systems are being designed on the micro and
meso scales. Assembly and maintenance become increasingly difficult as the size of
mechanisms decrease, and the minimum size of bearings and springs is limited. The
backlash of bearings also limits their usefulness in applications where high precision and
1
repeatability are needed. At small scales and for high precision applications, alternative,
non-traditional elements are needed.
1.2 RESEARCH MOTIVATION
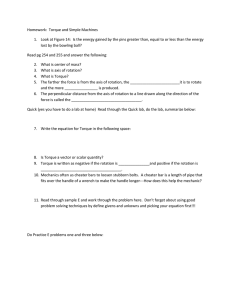
An example that demonstrates these needs is Sandia National Laboratory’s
Stronglink assembly, shown in Figure 1.1. The Stronglink is a high precision safety
and arming device used to provide mechanical isolation between electrical inputs
and a desired output, preventing unauthorized or unintentional detonation of a
weapon [2]. The Stronglink is a meso-scale device. The entire assembly is 1.186
inches in diameter, and its components are measured in fractions of an inch.
Future Stronglink designs will be done at even smaller scales.
Some of the assembly components include two solenoid actuated rotors (the drive
and gate rotor), and two pawls (the drive pawl and gate pawl). Both the rotors and the
Figure 1.1: Drive components in the Stronglink assembly.
2
pawls have helical extension springs to provide a restoring torque, and the rotors use
rolling-element bearings to constrain lateral translation. Functional specifications for the
rotors and pawls are given in Table 1.1.
Due to the nature of the Stronglink’s function as a safety and arming device,
every component in the assembly must have very high reliability. Because of the
assembly methods required to install them, the helical springs create a major reliability
concern. The springs have wire diameters ranging from 50 to 100 micrometers. The
helical coils are wound using semi-automated production equipment. The hooks at the
end of the springs, however, are formed by hand with tweezers and pliers, and the springs
are manually assembled into the Stronglink. These manual operations can nick or flatten
the wire, creating areas of high stress that may lead to failure [2].
The bearings used in the Stronglink are the smallest commercially available
miniature bearings with an outer diameter of 0.1 inches. As the size of the Stronglink
decreases in future designs, the size of the bearings are not able to decrease with it.
Table 1.1: Functional specifications for the (a) pawls and (b) rotors.
(a)
Rotation
Drive Pawl 17 degrees
Gate Pawl 9 degrees
Min. Torque
Max. Torque
0.00026 in-lb
0.0003 in-lb
0.00052 in-lb
0.0006 in-lb
(b)
Lateral Load Max. Lateral
Displacement
Drive Rotor 0.8 lb
Gate Rotor 0.02 lb
0.001 in
0.001 in
Rotation
Min. Torque
Max. Torque
8 degrees 0.0136 in-lb 0.0272 in-lb
15 degrees 0.00103 in-lb 0.00205 in-lb
3
Alternative solutions—components that keep the same basic functions of a bearing and a
spring, while avoiding the inherent disadvantages of each—are needed.
This research will use the Sandia Stronglink as an example and case study for the
methods and components developed in this thesis.
1.3 THESIS OBJECTIVES
The objective of this thesis is to develop reliable and scalable compliant
components to replace bearings and helical springs. Components replacing springs must
be able to produce specified torque/motion requirements. Components replacing bearings
must permit sufficient motion about the axis of rotation, bear specified loads in the lateral
directions, and fit within roughly the same design space as a bearing. Additionally, all
components will be designed to be manufactured using planar fabrication processes.
Practical application of the components will be demonstrated by their use in Sandia
National Laboratory’s Stronglink assembly.
Compliant mechanisms are good candidates for fulfilling these objectives.
Compliant mechanisms gain at least some of their mobility from the deflection of flexible
members [3] instead of from the relative motion between separate, rigid parts. They can
often be made in one piece, reducing the amount of assembly required, and they avoid the
friction, wear, and backlash associated with movable joints. These characteristics help to
increase the mechanism’s reliability, and make them easy to miniaturize.
4
1.4 DESIGN PROCESS
The first step in the design process is concept generation. From the list of
potential solutions, each was evaluated based on its ability to meet the functional
requirements of bearings and springs. Five concepts were chosen for further study. These
concepts fall into three categories: mechanisms that replace 1) the helical spring, 2) the
bearing, and 3) both the helical spring and the bearing.
The general method for evaluating each concept begins by creating an analytical
model to predict the movement, stresses, and resulting torque of the mechanism. These
models are used to determine whether the mechanism allows sufficient motion, meets the
specified torque/motion requirements, is able to bear the specified lateral loads, and fits
within the allotted design space. Components used in the Stronglink case study will
undergo only a few cycles in their life, and therefore none of the analysis includes
fatigue.
The analytical models are then validated by creating a CAD model, FEA model,
and a macro-scale prototype. The CAD model verifies the geometry of the design, the
FEA model verifies the stress and torque predictions, and testing of the macro-scale
prototype validates the torque and motion predictions.
Building and testing of meso-scale prototypes of selected concepts will be
conducted by Sandia National Laboratories.
The remainder of this chapter will review the manufacturing processes to be used
in fabricating the designs, and will then provide a review of the literature pertaining to
this research.
5
1.5 MANUFACTURING PROCESSES
Designs in this thesis have been developed on three different scales. Prototypes of
concepts are done on the macro scale, designs for Sandia’s Stronglink mechanism are
done on the meso scale, and application of concepts on the micro scale have also been
investigated. Table 1.2 lists the processes, materials, and design parameters associated
with each of these scales.
1.5.1 Computer Numerical Control Milling
Computer Numerical Control (CNC) milling was used to create macro-scale
prototypes. A two dimensional drawing is exported from a CAD model as a DXF file,
and imported into a Computer-Aided-Manufacturing (CAM) program. The CAM
program uses the drawing to create tool paths, and allows the user to specify
manufacturing parameters. This information is exported from the CAM program as an
NC file, which is imported into the CNC program. The CNC program controls the mill
and creates the part.
Table 1.2: Manufacturing processes and parameters.
Scale
Process
Macro
CNC Milling
Meso
Micro Wire
EDM
Micro
SUMMiT V
Material
Polypropylene
Titanium 6Al 4V
E [Mpsi (GPa)]
Sy [kpsi (MPa)]
Min. Feature Thickness [in (mm)]
Kerf Width [in (mm)]
0.2 (1.4)
5 (34)
0.0938 (2.381)
16.5 (114)
120 (825)
0.002 (0.0508)
0.003 (0.0762)
Polycrystalline
Silicon
24.5 (169)
261 (1800)
0.000039 (0.001)
0.000039 (0.001)
6
1.5.2 Micro Wire EDM
Micro wire electrical discharge machining (EDM) will be used by Sandia
National Laboratories to create parts for the Stronglink mechanism. In the micro wire
EDM process, a voltage difference is created between the workpiece and a wire thread.
The wire is brought up to the workpiece and an arc develops. This arc removes material,
cutting a path as the wire moves through the material. The workpiece material must be
conductive; titanium was used for the designs for Sandia. Three-dimensional machining
is possible though more difficult, and planar geometries are preferred [2].
1.5.3 SUMMiT V Fabrication
Microelectromechanical systems (MEMS) integrate mechanical and electrical
components on the micro scale [3]. The Sandia Ultra-planar, Multi-level MEMS
Technology 5 (SUMMiT V) fabrication process is a surface micromachining process
developed by Sandia, and is used to manufacture MEMS devices. It uses processes and
technologies similar to those developed for integrated circuit fabrication. Multiple layers
are deposited and then patterned using planar lithography.
Five planar layers of
polycrystalline silicon are available for design. The first layer is grounded to the
substrate. The remaining layers can contain independent planar mechanisms, or can be
connected to form more complex three-dimensional geometries. SUMMiT V fabrication
has the potential of obtaining high volume, low cost production [4].
7
1.5.4 Design Constraints
The minimum feature thickness and kerf width parameters constrain the geometry
of a part. The thickness of a flexure, for example, cannot be less than the minimum
feature thickness. Kerf width constrains the allowable distance between features of a part.
Spaces between features must be greater than or equal to the kerf width. For CNC
milling, the kerf width is equal to the diameter of the end mill. For micro wire EDM it is
equal to the diameter of the wire plus an offset from that diameter, and can vary from
0.0024 up to 0.0036 inches, depending on the thickness of the material being cut. For a
0.114 inch thick part (the thickness of the Stronglink’s rotors) the wire kerf is estimated
to be 0.003 inches. The kerf width for the SUMMiT V process is not associated with a
tool dimension, but is the minimum distance needed to ensure that separate features do
not fuse together.
The minimum inside radius of a part is also constrained by the kerf width, and
must be greater than or equal to one half the kerf width.
1.6 REVIEW OF LITERATURE
1.6.1 COMPLIANT REVOLUTE JOINTS
Compliant components that can replace bearings fall into the class of mechanisms
known as compliant revolute joints. Moon, Trease, and Kota [5] have suggested five
criteria be used in comparing different types of compliant revolute joints. They are (1)
range of motion, (2) amount of axis drift, (3) ratio of off-axis stiffness to stiffness about
8
the axis of rotation, (4) stress concentration effects, and (5) compactness of the joint.
They provide a qualitative comparison of some of the existing compliant revolute joints,
given in Table 1.3.
Table 1.3: Benchmarked flexible revolute joints. (Table taken from [5].)
9
Notch-type joints, as shown in Table 1.3(a), were first described by Paros and
Weisbord [6]. Table 1.3(b) [7], 1.3(c) [8], 1.3(d), 1.3(e) [9], 1.3(f) [10], and 1.3(g) [7] all
show methods that use leaf springs to create a revolute joint. Table 1.3(h) and 1.3(i) [9]
use circular leaf springs. The split-tube flexure in Table 1.3(j), introduced by Goldfarb
and Speich [11], and the cross-type joint in Table 1.3(k), introduced by Moon, Trease,
and Kota [5], gain their motion from deflection of elements in torsion.
To replace a bearing, a compliant component should permit a large range of
motion about the axis of rotation, have a high stiffness in the lateral directions, and be
compact enough to fit within the same design space as a bearing. These objectives
correspond to the criteria 1, 4, and 5 of Table 1.3. The only joints that are at least
‘normal’ or above on all three of these criteria are the two torsional joints, in Tables 1.3(j)
and 1.3(k), and none of them are ‘good’ in all three. One of the contributions of this
thesis will be to develop new types of compliant revolute joints that perform well in at
least these three, if not all five, criteria.
1.6.2 THE PSEUDO-RIGID-BODY MODEL
Howell [3] presents a method for analyzing systems that undergo large, nonlinear
deflections. The pseudo-rigid-body model (PRBM) treats compliant segments, such as
the beam in Figure 1.4(a), as if it were two rigid links pinned together, with a torsional
spring at the pinned joint, as shown in Figure 1.4(b). This approximation can give very
accurate results, predicting the position of the end of the beam with an error of less than
0.5%.
10
(a)
(b)
Figure 1.2: (a) Cantilevered segment with forces at the free end, and (b) its pseudo-rigidbody model equivalent.
The PRBM allows a compliant mechanism to be analyzed as if it was a rigid-link
mechanism. Traditional rigid-link mechanism theory can be used to determine the motion
and force-deflection relationship of a compliant mechanism. More details on the PRBM
can be found in [3].
11
12
CHAPTER 2
THE SERPENTINE FLEXURE
2
The remainder of this thesis will discuss each of the five concepts that were
selected for further development. In this chapter a scalable, planar, and space efficient
spring concept is introduced. The serpentine flexure gets its name from its winding,
snake-like pattern [12], and is an alternative to traditional spring elements, such as helical
springs or straight flexures. The design, application, and analysis of the serpentine flexure
are investigated, and its performance in the Stronglink case study is discussed.
2.1 DESIGN CONCEPT
The serpentine flexure is a compliant member that can replace helical springs or
straight compliant flexures, and can be made at small scales using planar fabrication
techniques. The serpentine flexure uses the same basic concept as a cantilever beam
(Figure 2.1(b)), but utilizes the available design space more efficiently by having the
beam weave back and forth between the fixed and free ends, as shown in Figure 2.1(b).
This effectively increases the beam’s length, decreasing the stiffness and maximum
stress, and increasing the maximum possible deflection.
13
(a)
(b)
Figure 2.1: (a) A cantilever beam, and (b) a serpentine flexure.
2.2 CASE STUDY
Currently, the Stronglink’s drive and gate pawls use helical springs to provide a
restoring torque. Preliminary concepts for replacing these springs used straight cantilever
beams attached to the pawls to provide the necessary torque. Due to space constraints
limiting the length and manufacturing constraints limiting the minimum thickness of the
beams, the designs were not flexible enough to meet the required torques and had safety
factors very close to 1. The serpentine flexure overcomes these problems. The serpentine
flexure uses the same design space as a cantilever beam, but its larger effective length
increases the flexibility and the safety factor.
The serpentine flexure can be integrated with other parts, greatly reducing
assembly requirements. In the Stronglink application, one end of the flexure is attached to
the pawl, and the flexure’s free end is constrained by contact with a pin. Manufacturing
processes and parameters for the macro-scale prototypes and for Sandia’s meso-scale
applications are given in Table 1.2. Functional specifications for the Stronglink pawls are
listed in Table 1.1(a). In addition to these requirements, the pawl/flexure part must be
balanced about its center of rotation, should not have self contact or contact with parts
14
other than the pin constraining its end, and the drive pawl must be able to be manually
disengaged.
2.3 ANALYSIS
2.3.1 Drive Pawl Application
To determine the minimum and maximum torque positions of the drive pawl
serpentine flexure, the angle between the flexure’s undeflected and deflected states was
measured at four key positions of the pawl, as shown in Figure 2.2. These measurements
Figure 2.2: Angular deflection at four key positions.
15
show that the minimum angular deflection (θ), and therefore the minimum torque, occur
at Position 2, and the maximum deflection and torque occur at Position 4.
A finite element analysis (FEA) model of the flexure was created and the
geometric parameters manipulated to achieve the desired torque characteristics. The FEA
mesh included 23,400 nodes, used the PLANE183 element, a higher order 2-D element,
and used a large displacement static analysis. The free end of the flexure was constrained
to allow translation only in the direction tangent to pin at the point of contact, and the
fixed end was constrained to allow only rotation about the center of rotation of the pawl.
A force was applied to create a torque, and the resulting deflection and stress results were
obtained. The deflection was analyzed at each of the key positions by
superimposing the FEA deflection results over the CAD model to ensure that the
flexure did not interfere with other parts. Next a scaled plastic prototype was constructed
and used to validate the FEA results. Figure 2.3 shows that the FEA and prototype
results are very similar, and that both have no interferences.
2.3.2 Gate Pawl Application
Whereas the drive rotor experiences both translation and rotation, the gate pawl
only rotates. This creates a simpler analysis, as only two positions need to be considered.
A FEA model was used to analyze the torque characteristics of the flexure, using the
same procedure used for the drive pawl FEA analysis. The FEA deflection results were
then superimposed over the CAD model and compared to the scaled prototype
deflections.
16
(a)
(b)
Figure 2.3: Drive pawl (a) FEA results and (b) prototype results.
Figures 2.4 and 2.5 show that the FEA and prototype results are very similar, and
that there is no interference between parts.
17
(a)
(b)
Figure 2.4: Gate pawl (a) FEA results and (b) prototype results for the minimum
deflection positions.
(a)
(b)
Figure 2.5: Gate pawl (a) FEA results and (b) prototype results for the maximum
deflection positions.
2.4 RESULTS
The FEA results predict that the drive pawl serpentine flexure’s torque is 0.00026
in-lb at minimum deflection (14.5 degrees of rotation), and 0.00056 in-lb at maximum
deflection (32.5 degrees of rotation). The gate pawl serpentine flexure’s torque is
18
predicted to be 0.0003 in-lb at the minimum deflection (8 degrees of rotation), and
0.0006 in-lb at maximum deflection (17 degrees of rotation).
2.5 CONCLUSIONS
2.5.1 Drive Pawl Application
Figure 2.6 gives the final geometry of the drive pawl serpentine flexure. Since the
flexure does not go the full depth of the pawl, the pawl could be manually disengaged by
Figure 2.6: Drive pawl serpentine flexure.
19
inserting a pin underneath the flexure to push on the pawl. The design meets the torque
specifications, does not interfere with other parts during the range of its motion, is
balanced about its center of rotation, and has a safety factor against yielding of 3.0.
2.5.2 Gate Pawl Application
Figure 2.7 gives the final geometry of the gate pawl serpentine flexure. The
flexure has the same depth as the pawl, 0.035 inches. The design meets the torque
specifications, does not interfere with other parts during the range of its motion, is
balanced about its center of rotation, and has a safety factor against yielding of 4.6.
Figure 2.7: Serpentine flexure geometry
20
CHAPTER 3
THE COMPLIANT ROLLINGCONTACT ELEMENT
3
3.1 DESIGN CONCEPT
Mankame and Ananthasuresh [13] have shown that contact-aided compliant
mechanisms—compliant mechanisms that use contact interactions with external bodies or
with different parts of the mechanism itself—can have enhanced functionality when
compared with traditional compliant mechanisms. The flexible members used in
traditional compliant mechanisms are typically constrained by boundary conditions at
their ends. Examples include a cantilever beam with a force at the free end, a beam fixed
at one end and guided at the other, or a beam that is pinned at both ends [3]. Beams that
contact other elements along their length have the potential of creating favorable
behaviors that might not be achieved by beams constrained only at their ends.
Contact interactions can be used to improve the joint’s ability to bear lateral loads.
Guérinot [14] has demonstrated that the contact of rigid elements in a joint can divert a
compressive load away from buckling-prone flexible segments. Contact interactions can
also increase the maximum possible deflection of a compliant beam [15].
21
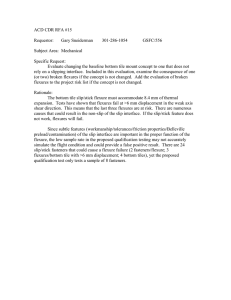
Figure 3.1: Rolling-contact joints used in a robot finger. (Figure taken from [16])
A potential application of these principles is the rolling-contact joint. Rolling-contact
joints consist of two rigid links that are constrained to roll without slipping over each
other. Figure 3.1 shows an example of rolling-contact joints used in a robot finger [16].
Designs such as these use gear teeth to impose a no-slip condition, and additional
linkages to hold the gear teeth in contact with each other. Chironis and Sclater [17] give
some examples of compliant rolling-contact joints, shown in Figure 3.2. These impose
no-slip contact by connecting the two rigid links using flexible strips. The flexures
contact the surface profiles of the link along their length, and are attached to the links at
the flexure ends. The multiple layers of the flexures alternate directions. The
configuration shown in Figure 3.2(a) is used to replace rack and pinion gears in hard
drives to obtain high precision movements. The configuration shown in Figure 3.2(b)
uses circular surface profiles for both links.
(a)
(b)
Figure 3.2: Compliant rolling-contact joint with links having (a) a circular profile and a
straight profile, and (b) two circular profiles. (Figures taken from [17])
22
Figure 3.3: The CORE.
In the configurations shown in Figure 3.2, the two links and the flexures are all
separate parts that must be assembled. The compliant rolling-contact element (CORE),
shown in Figure 3.3, is a variation on these designs that reduces the assembly
requirements by making each layer of the CORE monolithic, with the flexures and links
manufactured as one part. A similar monolithic design has been developed independently
by Jeanneau, Herder, Laliberte, and Gosselin [18].
3.2 MANUFACTURING AND ASSEMBLY
On the macro and meso scales, the components of the CORE are manufactured in
the configuration shown in Figure 3.4(a), using the manufacturing processes and
parameters listed in Table 1.2. Straight cuts adjacent to the ends of the flexure remove a
small section of the contact surface, but are needed in order to form the flexure. The
width of these cuts is slightly greater than the kerf width. Three of these components are
stacked together, as shown in Figure 3.4(b), and the lower surfaces are fixed together.
23
(a)
(b)
Figure 3.4: (a) Manufactured configuration of a single CORE component, and (b) three
components stacked together.
Deflection of the flexures onto the surfaces allows the upper surfaces to align and be
fixed together in the operational configuration shown in Figure 3.3.
On the micro scale, assembly becomes very difficult. Fortunately, the kerf width
for surface micromachining is very small. The CORE is able to be manufactured in the
operational configuration, leaving a 1 µm gap between the surfaces and the flexures, as
shown in Figure 3.5.
Figure 3.5: Micro-scale CORE design.
24
3.3 ANALYSIS
3.3.1 The Bernoulli-Euler Equation
Contact of the beams with the surfaces creates well defined moments in the beams
due to the relationship between the radius of curvature of a beam and the moment. This
relationship is derived from the Bernoulli-Euler equation, which states
M = EI
dθ
ds
(3.1)
where E is the modulus of elasticity, and I is the moment of inertia of the cross section.
dθ
is the curvature, defined as the rate of change of the angle of the beam, θ , per unit of
ds
arc length, s. Defined in this way, the Bernoulli-Euler equation is valid for large
deflections. Assumptions made when using equation 3.1 are that 1) the material is
linearly elastic, homogeneous, and isotropic, 2) the transverse-shear component of
deflection is small compared to that due to bending [1], and 3) the beams are thin, so that
the neutral axis can be assumed to be coincident with the centroidal axis even for initially
curved beams [3]. The effective radius of curvature of the beam is equal to
R' =
1
dθ / ds
(3.2)
EI
R'
(3.3)
Substituting this into equation (3.1) gives
M=
25
(a)
(b)
Figure 3.6: (a) Beam constrained by contact surface and (b) its equivalent beam with an
applied moment. (Adapted from [3])
When a beam is in contact with a surface that has a constant radius of curvature,
the radius of curvature of the beam is also constrained to be constant, as in Figure 3.6(a).
Equation (3.3) predicts that this constant radius of curvature throughout the beam will
create a moment that is also constant along the beam length. This means the segment
has the same behavior as a beam with a moment applied to the free end, as shown in
Figure 3.6(b).
Some beams may have an initial curvature in their undeflected state. The effective
radius of curvature in equation (3.3) takes into account any initial curvature of the beam
using the equation
⎛ 1
1 ⎞
R' = ⎜⎜ − ⎟⎟
⎝ Rs R0 ⎠
−1
(3.4)
where Rs is the radius of curvature of the surface constraining the beam’s shape, R0 is the
beam’s initial radius of curvature, and the beam’s thickness is assumed to be small
compared to Rs.
26
Counter-Clockwise Path =
Positive Radius of Curvature
Clockwise Path =
Negative Radius of
Curvature
Figure 3.7: Sign conventions for radii of curvature applied to CORE flexures.
3.3.2 Sign Convention
Equation (3.2) predicts that the radius of curvature is proportional to the rate of
change of the angle of the beam per unit of arc length. If the angle of the beam is
increasing (along the path of the beam starting at the grounded end) then the radius of
curvature will be positive. The path of the beam will be counter-clockwise. If the angle of
the beam is decreasing then the radius of curvature will be negative, and the path will be
clockwise, as shown in Figure 3.7.
3.3.3 Torque
Equation (3.3) can be used to find the torque acting on the CORE. If the lower
surface is grounded, then the torque on a single layer of the upper surface is equal to the
sum of the moments in the upper and the lower segments of the flexure, as shown in
Figure 3.8. This can be simplified to
27
(a)
(b)
(c)
Figure 3.8: (a) Moment in the upper segment of the flexure, (b) moment in the lower
segment of the flexure, and (c) torque on the upper surface.
⎛ 1
1
T = EI ⎜⎜ ' + '
⎝ RU R L
⎞
⎟
⎟
⎠
(3.5)
where T is the torque, RU' is the effective radius of curvature of the upper segment of the
flexure, and RL' is the effective radius of curvature of the lower segment of the flexure.
The total torque is then found by summing the torques acting on each layer of the CORE.
The CORE flexures for the macro and meso scale designs are initially straight
( R0 = ∞) therefore, by equation (3.4), R` is equal to Rs. The signs are different for the
radii of the upper and the lower surfaces, so
RU' = − RL'
(3.6)
Substituting equation (3.6) into equation (3.5) and simplifying gives
T =0
(3.7)
The micro scale configuration has an initial radius of curvature equal to − Rs .
Substituting this into equation (3.4) yields
R' =
Rs
2
28
(3.8)
for a deflected section of the flexure. The deflected section can be on the upper or lower
segment, depending on the direction that the upper surface is displaced. The opposite
segment is undeflected ( R ' = ∞), and the inverse of the effective radius of curvature will
be 0. Substituting equation (3.8) into equation (3.5) gives
2 EI
Rs
T=
(3.9)
Equation (3.9) predicts a constant torque throughout the rotation of the CORE.
3.3.4 Stress
The maximum stress in a rectangular beam in bending is equal to
σ max =
Mh
2I
(3.10)
where h is the thickness of the beam. Because the moment is constant along the length of
a beam in contact with a constant radius surface, equation (3.10) predicts that the stress
will also be constant along its length. This constant stress is given by substituting
equation (3.3) into equation (3.10):
σ max =
Eh
2 R'
(3.11)
Thus the maximum stress in the CORE depends only on the modulus of elasticity
of the chosen material, the thickness of the flexure, and the effective radius of curvature.
29
Figure 3.9: Geometric parameters defining a point P on the CORE.
3.3.5 Position Analysis
The motion of given point P on the upper surface of the CORE is defined by a
cycloid, similar to the path of a point on a wheel as it rolls without slipping along the
ground. The x and y coordinates of point P are given by the following equations
θ 2 = 2θ1 − 90
(3.12)
x P = 2 Rs cos θ1 + a cos θ 2 + b sin θ 2
(3.13)
y P = 2 R s sin θ 1 + a sin θ 2 − b cos θ 2
(3.14)
where θ 2 , θ 3 , a, and b are defined in Figure 3.9.
3.4 RESULTS
Figure 3.10 shows the cycloidal path followed by an arbitrary point P on the
CORE. Though this path is not circular, it can be seen that, for a finite range of motion, a
30
4
3
y
2
1
0
-5
-4
-3
-2
-1
0
1
2
3
x
Figure 3.10: Motion path of a point on the CORE.
section of the curve can closely approximate a circular path. The CORE could be used as
a revolute joint, but would experience some axis drift. The magnitude of this axis drift
would depend on the operational range of motion of the CORE.
A macro-scale prototype of the CORE was made, and performed as expected. A
micro-scale design has been submitted for fabrication using the SUMMiT V process.
3.5 CONCLUSIONS
The CORE bearing can be made using planar fabrication methods. It can bear
high loads with low friction, making it an ideal candidate for replacing a bearing. It does
experience axis drift, though for a limited range of motion this drift can be very small.
The macro and meso scale configurations analyzed in this chapter have no reaction
torque. The initial radius of curvature in the CORE flexures could be adjusted to create a
torque that is constant throughout the range of the CORE’s motion, as was done in the
micro scale configuration.
31
32
CHAPTER 4
4
THE CORE BEARING
The previous chapter introduced the compliant rolling-contact element (CORE),
an element that allows large deflections and has cycloidal motion. Creatively combining
the CORE with other elements allows it to be used in mechanisms that obtain purely
rotational motion. This chapter introduces the CORE bearing as a potential replacement
for a traditional bearing.
4.1 DESIGN CONCEPT
Rigid roller elements can be combined with flexible beam elements to obtain pure
rotation. One example, shown in Figure 4.1, is a rotary bearing developed by Sandia
Figure 4.1: A contact aided rotary bearing. (Figure taken from [19])
33
National Laboratories [19]. Lateral loads are transmitted through the roller elements in
the bearing, while a single flexible band is used to hold the elements in place. The CORE
bearing design uses similar principles to obtain rotation. By using the CORE flexures as
its flexible beam elements, however, it is able to be manufactured as one single part.
The CORE bearing imitates a planetary gear system with three planets, a sun, and
a ring, as shown in Figure 4.2. CORE flexures replace the gear teeth, providing a no-slip
condition. These flexures also create a restoring torque. Flexure 1 refers to the flexures
connecting the sun and the planets, and Flexure 2 refers to the flexures connecting the
planets and the ring. The sun is able to rotate relative to the ring without any sliding
between surfaces, minimizing frictional energy losses. Lateral loads applied to the ring
are transmitted through the planets to the sun, constraining lateral motion.
Flexure 2
Ring
Rp
h2
Rr
Planet
Planet
Sun
Flexure 1
Rs
Rp
Rp
Planet
h1
b = out-of-plane
thickness
(a)
(b)
Figure 4.2: (a) CORE design, and (b) design parameters.
34
4.2 MANUFACTURING AND ASSEMBLY
The CORE is manufactured in one piece. Figure 4.3 shows two possible
configurations. In the configuration shown in Figure 4.3 (a), Flexure 1 is initially straight,
and Flexure 2 has an initial curvature equal to that of the ring. The ring is sectioned into
three parts. This configuration requires that the flexures be wound onto the sun and
planets, and then that the ring section be fixed together. This could be done either by
placing the assembled CORE into its mating hole, by having a separate constraining ring
that fits around it, or by including latches on the ring sections that lock the sections
together.
Figure 4.3(b) shows a configuration that does not require any assembly. This is
configuration is more practical for meso or micro scale applications. In the manufactured
position, there are spaces between the flexures and each of the parts that they contact.
These spaces are at least as wide as the kerf width. The profiles of the sun and ring are
(a)
(b)
Figure 4.3: (a) A manufactured position that requires assembly and (b) a manufactured
position with no assembly required.
35
Figure 4.4: Drawing of micro-scale CORE bearing ( OD = 1000 µm ).
designed so that once the bearing is rotated past the manufactured position the flexures
come into contact with the circular sections of the ring, planets, and sun, eliminating
spaces between the parts. Figure 4.4 shows the drawing of a micro-scale design using this
configuration.
4.3 ANALYSIS
4.3.1 Effective Radii of Curvature
The effective radii of Flexures 1 and 2 when in contact with the planet are found
using equation (3.4):
−1
R1' p
⎛ 1
1 ⎞⎟
=⎜
−
⎜ R p R0 ⎟
1 ⎠
⎝
'
2p
⎛ 1
1 ⎞⎟
=⎜
−
⎜ R p R0 ⎟
2 ⎠
⎝
R
36
(4.1)
−1
(4.2)
where R01 and R02 are the initial radii of Flexures 1 and 2, respectively. The effective
radius of Flexure 1 when in contact with the sun is
⎛ 1
1 ⎞⎟
R =⎜
−
⎜ Rs R0 ⎟
1 ⎠
⎝
−1
'
1s
(4.3)
and the effective radius of Flexure 2 when in contact with the ring is
R
'
2r
⎛ 1
1 ⎞⎟
=⎜
−
⎜ R r R0 ⎟
2 ⎠
⎝
−1
(4.4)
For the configuration of Figure 4.2(a), equations (4.1), (4.2), (4.3), and (4.4) simplify to
R1' p = R p
R
'
2p
(4.5)
⎛ 1
1 ⎞⎟
=⎜
−
⎜R
⎟
⎝ p Rr ⎠
−1
(4.6)
R1' s = Rs
(4.7)
R2' r = ∞
(4.8)
and for the configuration of Figure 4.2(b) these equations simplify to
R1' p = ∞
(4.9)
R2' p = ∞
(4.10)
⎛ 1
1 ⎞⎟
+
R =⎜
⎜R
⎟
⎝ s Rp ⎠
−1
'
1s
⎛ 1
1 ⎞⎟
−
R =⎜
⎜R
⎟
⎝ p Rr ⎠
'
1r
37
(4.11)
−1
(4.12)
4.3.2 Torque on Planets
The resulting torque for the device is found by assuming that the ring is fixed and
solving for an output torque on the sun. First, the torque on the planet must be found. The
planet has two CORE joints; one connecting it to the ring, and one connecting it to the
sun. The torque on the planet is equal to the sum of the torque produced by each CORE
joint. These torques are found using equation (3.5), and their sum is equal to
⎛ 1
⎛ 1
1 ⎞
1 ⎞
T p = EI 1 ⎜ ' + ' ⎟ + EI 2 ⎜ ' + ' ⎟
⎜ R1
⎟
⎜ R2
⎟
⎝ p R1 s ⎠
⎝ p R2 r ⎠
(4.13)
where I1 and I2 are the moments of inertia of the flexures and are defined as
I1 =
bh13
12
(4.14)
I2 =
bh23
12
(4.15)
When determining the signs of the radii, the ends of the flexures attached to the
planet should be considered as the grounded ends.
4.3.3 Torque on Sun
Planetary gear theory provides the equation necessary to find the torque applied on the
sun by the planet when the ring is fixed:
T ps = T p
Rs ( Rs + 2 R p )
R p ( 2 Rs + 2 R p )
(4.16)
where Tp is the torque on the planet, and Tps is the torque applied by the planet on the sun.
38
Finally, multiplying by np, the number of planets, gives the combined torque due
to all the planets. The total output torque, then is
Tout = n p T ps
(4.17)
4.4 RESULTS
Macro-scale prototypes of both the assembly-required configuration of Figure
4.3(a) and the no-assembly configuration of Figure 4.3(b) were built to demonstrate the
CORE bearing concept, and performed as expected. Figure 4.5 shows the no-assembly
required prototype.
Both configurations were analyzed on the meso scale. For the given design space
and manufacturing constraints, the safety factor is less than one, and the CORE bearing
would fail. The safety factor can be raised by extending the design space and allowing a
larger outer diameter for the CORE bearing, or by using an alternative fabrication process
that allows a smaller flexure thickness than micro wire EDM.
Figure 4.5: Prototype of no-assembly CORE bearing.
39
LIGA (a German acronym for lithography, electroplating, and molding) is another
process available at Sandia National Laboratories. Analysis was done to determine if this
process would present a feasible alternative. The material used in LIGA is Nickel
manganese, with a Young’s modulus of 196 GPa and a yield strength of 800 MPa.
Design parameters and results for the designs are given in Tables 4.1 and 4.2,
respectively.
Reasonable safety factors are possible using LIGA. The torque is constant, and is
close to 0.0001 in-lb for both configurations. This is over two orders of magnitude below
the maximum required torque needed to replace the spring in the Stronglink components.
4.5 CONCLUSIONS
The CORE bearing minimizes frictional losses, allows up to 120 degrees of pure
rotation without any axis drift, has a high lateral stiffness, and meets all the requirements
for replacing a bearing. Designs for Sandia’s Stronglink cannot be made using micro wire
Table 4.1: Design parameters (in inches).
Design Configuration
Assembly Required
No Assembly Required
Rr
0.05
0.05
Rp
0.0167
0.00167
Rs
0.0167
0.0167
h1
0.0001
0.00005
Table 4.2: Results
Design Configuration
Assembly Required
No Assembly Required
Torque (in-lb)
0.00009
0.00011
40
Safety Factor
1.3
1.3
h2
0.00016
0.00016
EDM, but LIGA, a fabrication process available at Sandia, appears to be a feasible
alternative. The CORE bearings provide a constant torque. This torque is not high enough
to replace the springs in the Stronglink, but could be used as a spring in other
applications.
41
42
CHAPTER 5
THE ELLIPTICAL CORE BEARING
5
5.1 DESIGN CONCEPT
The elliptical CORE bearing, shown in Figure 5.1, is a variation of the CORE
bearing. It is similar to a planetary gear and, like the CORE bearing, has CORE flexures
connect the sun to the planets, providing a no-slip condition between them. The
(a)
(b)
Figure 5.1: (a) Elliptical CORE bearing and (b) the kinematic model of the bearing.
43
difference in the elliptical CORE bearing is that the sun and planet profiles are
elliptical instead of circular. This is done to reduce the stresses in the CORE flexures and
to create a more compact device that is better able to meet the given space constraints.
The elliptical CORE bearing uses the elliptical gearing concept. Two ellipses,
pinned at their foci as shown in Figure 5.2(a), are able to rotate a full 360 degrees while
maintaining a no-slip contact [17]. The distance between the two pinned foci remains
constant. If one of the ellipses is grounded, then as the non-grounded ellipse rolls on the
grounded ellipse, its foci will travel in a circular path, as shown in Figure 5.2(b).
The elliptical CORE bearing places one of the foci of the sun ellipse at the center of the
device (Point O in Figure 5.1(b)). One of the foci of the planet ellipse then revolves about
the device’s center. The kinematic model would include a link (the planet arm)
connecting the foci of the sun and planet ellipses, as shown in Figure 5.1(b). The contact
surface between the planet and ring is a circular profile. The center of the ring is at Point
O, and the center of the circular section of the planetary gear coincides with the focus of
the ellipse.
(a)
(b)
Figure 5.2: (a) Elliptical gears pinned at foci and (b) with one of the gears grounded.
44
Figure 5.3: A passive joint between the planet and ring.
A no-slip condition can be obtained between the planets and ring by using gear
teeth, as shown in Figure 5.1(a), or they could be connected by CORE flexures. CORE
flexures at this interface could have high stresses due to the small radius of curvature of
the circular planet surface. Another variation of the design could use a passive joint, as
shown in Figure 5.3. With a passive joint, the condition between the planets and ring
would change from that of rolling without slipping to a pinned condition. This would
change the kinematics of the joint and introduce some friction, but would avoid high
stresses and provides a simpler design than the gear teeth configuration.
The CORE joints in the design can provide a torque when the device is rotated,
and the in-plane translation is constrained.
5.2 MANUFACTURING AND ASSEMBLY
To form the CORE joints, the elliptical CORE bearing is made in multiple layers.
Figure 5.4 shows one layer of the passive joint configuration in its manufactured position.
To assemble the bearing, the initially straight flexures are deflected onto the surfaces of
45
Figure 5.4: A single layer of the elliptical CORE bearing in its manufactured position.
the sun and planets, and the multiple layers are fixed together with the direction of the
flexures alternating between each layer. These are then placed inside of the ring.
5.3 ANALYSIS
5.3.1 Definition of an Ellipse
An ellipse is defined by the geometric parameters a and b, as shown in Figure
5.5(a). In the standard position, the major axis of an ellipse is along the x axis, and is
equal to 2a. The minor axis is along the y axis, and is equal to 2b. The foci lie on the
major axis of the ellipse, and are a distance a from the point (0, b). By definition, a point
lies on the ellipse if
d ( F1 , P ) + d ( P, F2 ) = 2a
46
(5.1)
(a)
(b)
Figure 5.5: (a) Defining the foci of an ellipse, and (b) defining a point on the ellipse.
(Figures taken from [20])
where F1 and F2 represent the foci of the ellipse, as shown in Figure 5.5(b). From this
definition, the equation of an ellipse in standard position can be found [20] to be
1
⎛
x2 ⎞2
⎜
y = b⎜1 − 2 ⎟⎟
a ⎠
⎝
(5.2)
The parameter c is the distance from the origin to the foci, and is equal to
c = a2 − b2
(5.3)
5.3.2 The Elliptical Gearing Concept
The elliptical gearing concept follows from the definition of an ellipse. Figure 5.6
shows two ellipses that contact each other at a point P, and are symmetric about an axis
passing through P and tangent to both ellipses. By symmetry
d ( F1 A , P) = d ( P, F1B )
(5.4)
d ( F2 A , P ) = d ( P, F2 B )
(5.5)
47
Figure 5.6: Elliptical gear concept.
According to equation (5.1), therefore
d ( F1 A , P) + d ( P, F2 B ) = 2a
(5.6)
d ( F1B , P) + d ( P, F2 A ) = 2a
(5.7)
The distance between the opposite foci of two ellipses as they roll without slip, therefore,
is constant, and is equal to 2a. For the elliptical CORE bearing, therefore
L p = 2a
(5.8)
where L p is the length of the planet arm in the kinematic model.
5.3.3 Position Analysis
The initial position of the ellipses is defined as the position when the point of
contact between the two ellipses is at (0, b). The angle of the planet arm, measured from
the horizontal, is
⎛b⎞
⎝a⎠
θ p = sin −1 ⎜ ⎟
0
48
(5.9)
For a point of contact with the coordinate (x, y), where x is given and y is defined by
equation (5.2), the angle of the planet arm from the horizontal is
⎛ y ⎞
⎟
⎝c− x⎠
θ p = tan −1 ⎜
(5.10)
for x < c . The angular displacement from the initial position, therefore, is given by
∆θ p = θ p − θ p0
(5.11)
If the elliptical CORE bearing uses a passive joint between the planets and the
ring, then the angular displacement of the planet arm is equal to the angular displacement
of the ring. Equation (5.11), therefore, defines the total rotation of the ring relative to the
sun.
5.3.4 Stress Analysis
The internal moment in the beam can be found using the Bernoulli-Euler
equation:
M = EI
dθ
ds
(5.12)
Substituting this into equation (3.10), the equation for the maximum stress in a
rectangular beam, results in
σ=
The curvature,
Eh ⎛ dθ ⎞
⎜
⎟
2 ⎝ ds ⎠
(5.13)
dθ
, for an ellipse is not constant. It can be found for a twice
ds
differentiable curve, however, using the equation [20]
49
80
dυ/ds
60
40
20
0
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
x
Figure 5.7: The curvature of an ellipse ( a = 0.03 ) as a function of x.
y' '
dθ
=
ds 1 + ( y ' ) 2
[
(5.14)
]
3/ 2
Substituting equation (5.2) into equation (5.14) and simplifying gives
dθ
=
ds
b
2
⎡ ⎛ b2
⎞⎛ x ⎞ ⎤
2
a ⎢1 + ⎜⎜ 2 − 1⎟⎟⎜ ⎟ ⎥
⎠⎝ a ⎠ ⎦⎥
⎣⎢ ⎝ a
3/ 2
(5.15)
The curvature increases as x increases, as shown in Figure 5.7. The maximum stress in
the CORE flexures occurs when x is greatest. The maximum value of x occurs at xf,
the x coordinate where the flexures attach to the ellipse. Decreasing xf will decrease the
stress, but will also decrease the range of motion of the bearing.
5.3.5 Torque
In Chapter 3 it was shown that when the CORE flexures are manufactured
initially straight, the CORE joint doesn’t have a restoring torque. The initial curvature of
the flexures could be adjusted to create a restoring torque if a torque is desired.
50
5.3.6 Arc Length of an Ellipse
The length of the CORE flexures must be equal to the arc length of the elliptic
surface that they will contact. The general formula for the arc length of a differentiable
curve is [20]
b
s = ∫ 1 + ( y' ) 2
(5.16)
a
The length of the elliptical CORE bearing flexures, therefore, is equal to
xf
l f = 2 ∫ 1 + ( y' ) 2
(5.17)
0
Substituting equation (5.2) into equation (5.16) and simplifying gives
xf
lf = 2∫
0
a 2 − (1 − b 2 / a 2 ) x 2
a2 − x2
(5.18)
This can be solved using Jacobi’s elliptic integral of the second kind [21]. Elliptic
integrals are a class of integrals used in solving many engineering problems, such as the
non-linear deflection of a cantilever beam [3]. These integrals were given their name
because they first arose while studying the problem of how to compute the arc length of
an ellipse [22]. For more details on elliptic integrals see [3, 21-23]. Equation (5.18) can
also be solved numerically.
5.4 STRONGLINK CASE STUDY
The parameters for the drive rotor design are listed in Table 5.1, and the results in
Table 5.2. t is the thickness of the CORE flexure, and n f is the safety factor. The gate
51
Table 5.1: Drive rotor elliptical CORE bearing design parameters.
a
0.03
b
0.004
t
0.002
xf
0.014
Table 5.2: Drive rotor elliptical CORE bearing results.
lf
0.028
nf
1.14
∆θ
8
rotor needs 15 degrees of rotation, almost twice as much as the drive rotor. Using the
micro wire EDM manufacturing constraints, the safety factor for this design would be
below 1. Using an alternative fabrication process such as LIGA would allow the CORE
flexure thicknesses to decrease, and greater rotation for the gate rotor design could be
obtained.
5.5 CONCLUSIONS
The elliptical CORE bearing’s design has been discussed, and a method of
analysis presented. The device is scalable, able to be made by planar fabrication
processes, can bear lateral loads, and has pure rotation without axis drift. It is a good
candidate for replacing traditional bearings.
The elliptical CORE bearing is much more compact than the CORE bearing. The
tradeoff is that it has less rotation. As the size of the elliptical CORE bearing decreases,
its maximum rotation decreases as well.
52
For the Stronglink application, the elliptical CORE bearing is able to obtain
sufficient rotation to replace the drive rotor bearing. It could also replace the gate rotor
bearing if it were made using an alternate fabrication process, such as LIGA.
53
54
CHAPTER 6
THE COMPLIANT CONTACT-AIDED
REVOLUTE JOINT
6
The CORE design in Chapter 3 obtained increased deflection and lateral
stiffness by the use of contact interactions. In the CORE design, flexures
contacted a constant radius surface along their entire length. In this chapter a
design is introduced that uses contact interactions along only a partial section of
a cantilever beam. Figure 6.1 shows a concept presented by Chironis and Sclater
[17], where a cantilever beam is placed adjacent to a constant radius surface. As
the beam deflects, a portion of the beam comes into contact with the contact surface.
This type of contact interaction, as with that of the CORE design, can increase the
deflection and lateral stiffness of a joint. The application and analysis of this concept will
be investigated in this chapter.
Figure 6.1: A leaf spring contacting a curved surface. (Figure taken from [17])
55
6.1 DESIGN CONCEPT
The compliant contact-aided revolute (CCAR) joint, shown in Figure 6.2, consists of
multiple flexures. These flexures are fixed at one end (Point B), and free at the other
(Point A). The free ends of the flexures are constrained by the cam surface of the
gauge pin. The cam surface has a constant radius of curvature, Rc, with its center located
at the Point C. The contact surfaces also have a constant radius of curvature, Rs, and
interact with the flexures. Deflection of the flexures allows the CCAR joint to rotate, and
provides a restoring torque. As the flexures deflect they come into contact with the
contact surfaces. The contact surfaces constrain the flexures to have a constant radius of
curvature along the contacting segments of each flexure.
Flexures
Contact Surfaces
Gauge Pin with
Cam Surfaces
b = depth
into the page
(a)
(b)
Figure 6.2: (a) CCAR joint design and (b) design parameters.
56
6.2 MANUFACTURING AND ASSEMBLY
For a beam that is either initially straight or has a constant initial curvature, and is
in contact with a surface of constant curvature, the following principle applies: if a
section of the contact surface is removed, the beam segment corresponding to that section
will retain the shape of the contact surface so long as a subsequent segment of the beam
is still in contact with the surface.
The proof of this principle is as follows: the radius of curvature in the contacting
segment is constrained to be constant, as shown in Figure 6.3(a). Equation (3.3) predicts
that this constant radius of curvature will create a moment that is also constant along the
segment length. For an initially straight beam ( R0 = ∞), equation (3.4) predicts that R` is
equal to Rs, therefore
M =
EI
Rs
(6.1)
This moment is transferred to the end of the segment corresponding to the removed
contact surface, as shown in Figure 6.3(b). With an applied moment, the effective radius
(a)
(b)
Figure 6.3: (a) Segment of beam in contact with surface, and (b) segment of beam
corresponding to removed contact surface.
57
of curvature will be constant along the length of this segment of the beam. By rearranging
equation (3.3), the effective radius of curvature of the segment is found to be
Rb =
EI
M
(6.2)
Substituting equation (6.1) into equation (6.2) and simplifying gives
Rb = Rs
(6.3)
The segment of the beam corresponding to the removed contact surface has the
same constant radius of curvature as the section that is in contact with the surface.
This principle is important because the kerf width for the micro wire EDM
process, as given in Table 1.2, makes the configuration shown in Figure 6.2 difficult to
manufacture. The spaces between the contact surfaces and the flexures are smaller than
the wire kerf.
Figure 6.4(a) shows and alternative configuration that meets all the manufacturing
constraints. All spaces between features are 0.0034 inches or larger, the smallest inside
(a)
(b)
Figure 6.4: (a) Manufactured position and (b) assembled position of CCAR joint.
58
radius is 0.0017 inches, and the minimum thickness of any feature is 0.002 inches. Figure
6.4(b) shows the assembled position. The exterior flexures deflect, allowing the sections
to come together and be held in place by a latch.
Once assembled, the beams and contact surfaces in this configuration have the same
geometry as those of the configuration in Figure 6.2, except that sections of the contact
surfaces are removed, as shown in Figure 6.5. When the beam in Figure 6.5(a) is in
contact with the surface subsequent to the removed sections, it has the same behavior as
the beam shown in Figure 6.5(b), where the contact surface extends to the base of the
beam. The beams also have the same behavior at the beginning of rotation before either
beam makes initial contact with the surfaces. The only difference between the two
configurations is that the beam in Figure 6.5(b) will initiate contact with the surface
earlier in the rotation of the joint than the beam in Figure 6.5(a). The behavior will vary
slightly during the period.
The exterior beams connecting the sections of the CCAR joint are initially curved,
and then constrained to be straight after assembly. Equation (3.4) for these beams
simplifies to
'
Rext
= R0 ext
(a)
(6.4)
(b)
Figure 6.5: (a) Section of joint with cuts, and (b) equivalent section without cuts.
59
where R0 ext is the initial curvature of the exterior beams. Equation (3.11) becomes
σ max =
ext
Ehext
2 R0 ext
(6.5)
where hext is the thickness of the exterior beam.
A latch holds the joint together once assembled. The beam on the latch deflects a
distance of yl during assembly. Using linear elastic beam equations, the stress in this
beam is found to be
σ max
latch
=
3Ey l hl
2 L2l
(6.6)
where hl is the thickness of the latch beam, and Ll is its length. n f ext and n f latch , the safety
factors against yielding for the exterior beams and for the latch, respectively, can be close
to one because these beams only deflect during assembly, and then are fixed in place by
the mating hole in the rotor.
The kerf width for the micro-scale design is small enough that the CCAR joint
can be manufactured in its operational configuration.
6.3 ANALYSIS
As the CCAR joint rotates, the flexures come into contact with the opposing
contact surfaces. Figure 6.6 represents a flexure in contact with a constant radius surface..
The length of beam in contact with the surface is measured by the variable θ s , which
increases with the rotation of the joint. This contact interaction will be developed by first
analyzing the contacting segment of the beam, and then analyzing the non-contacting
60
non-contacting
segment
contacting
segment
Figure 6.6: A beam in contact with a surface of constant radius.
6.3.1 Contacting Segment Analysis
The contacting segment’s radius of curvature is constrained by the contact
surface, and the moment in this segment of the beam is given by equation (6.1). Initially,
as the CCAR joint begins to rotate, the moment at the base of the beam will be less than
the moment in equation (6.1). In this condition, the beam acts as a traditional cantilever
beam, with θ s being equal to zero. Contact with the surface is initiated once the moment
at the base of the beam becomes equal to the moment in equation (6.1), and the length of
the contacting segment will increase with additional rotation after initial contact occurs.
This means the segment has the same behavior as a beam with a moment applied to the
free end, as shown in Figure 6.7.
The maximum stress for the beam is found in the contacting segment, and can be
found using equation (3.11).
61
Figure 6.7: Segment with curvature constrained by the contact surface (dashed lines) and
an equivalent beam with an applied moment.
6.3.2 Non-Contacting Segment Analysis
The non-contacting segment can be treated as if it were rigidly attached at its base
to the contact surface, as shown in Figure 6.8, with the condition that the moment at the
base of the non-contacting segment equal the moment at the end of the contacting
segment, as defined by equation (6.1). The non-contacting segment can be modeled
Figure 6.8: Pseudo-rigid-body model of beam.
62
using the pseudo-rigid-body model (PRBM) [3]. The length of the non-contacting
segment of the beam is
l 'f (θ s ) = l f − θ s R
(6.7)
l f is the total length of the beam, including the contacting segment, and equals
l f = R r + Rc − δ c − h / 2
(6.8)
where Rr and δ c are geometric parameters defined in Figure 6.2(b).
The base of the non-contacting segment is at an angle of θ s from the vertical, and
the PRBM parameters φ and Θ are measured from this orientation. The position of the
base is given by
xb = ( R) sin θ s
(6.9)
y b = ( R)(1 − cos θ s )
(6.10)
where xb and yb are the x and y positions as measured from the base of the contacting
segment of the beam.
6.3.3 Kinematic Analysis
Using the pseudo-rigid-body model for the beam, the mechanism can be modeled
as a rigid-body four-bar mechanism, as shown in Figure 6.9. The cam surface of the
gauge pin can be modeled kinematically as if there were a link connecting Point A and
Point C. This is link 4. Link 3 is the PRBM link of the non-contacting segment of the
beam, and link 2 connects the PRBM link to the center of the mechanism. Both link 2 and
link 3 change lengths as θ s increases. Link 1 connects the center of the mechanism with
63
(a)
(b)
Figure 6.9: (a) Non-contacting segment of beam and gauge pin, and (b) equivalent rigidlink four-bar mechanism.
the center of the cam surface arc. The following parameters are used in the derivation of
the link lengths and angles, as shown in Figure 6.10:
δ 1 = ( Rr − xb ) 2 + yb2
Figure 6.10: Kinematic analysis parameters.
64
(6.11)
δ 2 = (1 − γ )l 'f
⎛
yb
⎝ Rr − x b
α = tan −1 ⎜⎜
(6.12)
⎞
⎟⎟
⎠
(6.13)
The link lengths are given by the following equations:
r1 = δ c
(6.14)
r2 = δ 12 + δ 22 − 2δ 1δ 2 cos(α + θ s )
(6.15)
r3 = γ (l ' f )
(6.16)
r4 = Rc − h / 2
(6.17)
The angle θ 2 is related to the total rotation of the mechanism, θ t , by the equation
⎛ δ2
⎞
sin(α + θ s ) ⎟⎟
⎝ r2
⎠
θ 2 = θt + α − sin −1 ⎜⎜
(6.18)
The angles θ 3 and θ 4 can be found using the closed-form equations for a four-bar
mechanism. The force angle and pseudo-rigid-body angle are calculated as
φ = θ 4 − θ s − θt
(6.19)
Θ = θ3 − θ s − θt − 180
(6.20)
and the torque experienced by the mechanism is
T = nb Fδ c sin θ 4
(6.21)
where nb is the number of beams in the mechanism, and F is the force acting on the beam
as predicted by the PRBM.
65
6.3.4 Sensitivity Analysis
The output torque of the CCAR joint is a function of the flexure thickness, h, and
the radius of the cam surface, Rc. The minimum tolerance of ± 0.0002 inches is assumed
to be a surface profile tolerance [24], so maximum change in the radius of the cam
surface, ∆Rc, is 0.0002 inches. The flexure thickness, however, involves two surfaces;
therefore the change in flexure thickness, ∆h, is 0.0004 inches.
The nominal condition is shown in Figure 6.11(a). The length of the flexure is
decreased by twice the tolerance value, or 0.0004 inches, creating a space between the
flexure tip and the cam surface. This space in the nominal condition permits assembly of
the CCAR joint in the upper bound condition (Figure 6.11(b)), the condition in which the
torque will be highest. In this condition the flexure is thicker, the radius of the cam
surface is smaller, and the space between the two parts is eliminated. The upper bound
for the torque is defined as
Tupper = T (hnom + ∆h, Rcnom − ∆Rc )
(a)
(b)
(6.22)
(c)
Figure 6.11: Flexure end and cam surface on pin in the (a) nominal condition, (b) upper
bound condition, and (c) lower bound condition.
66
where hnom is the nominal thickness of the flexure, Rcnom is the nominal radius of the cam
surface. In the lower bound condition, shown in Figure 6.11(c), the flexure thickness is
smaller, the radius of the cam surface is larger, and the space between the flexure tip and
the cam surface is equal to four times the tolerance value, or 0.0008 inches. The lower
bound for the torque is defined as
Tlower = T (hnom − ∆h, Rcnom + ∆Rc )
(6.23)
The space between the flexure tip and the cam surface results in zero torque
during the first degrees of rotation. The flexure contacts the cam surface after the joint
rotates θ t0 degrees, where θ t0 is defined as
⎡ r12 + (r2 − r3 ) 2 − r42 ⎤
⎥
2r1 (r2 − r3 )
⎣
⎦
θ t = cos −1 ⎢
0
(6.24)
r1, r2, r3, and r4 are parameters in the kinematic model of the joint, and are functions of h
and Rc.
6.3.5 Lateral Load Analysis
Both of the rotors will have lateral loads. The magnitudes of these loads are listed
in Table 1.1(b). Some of the beams are placed into compression, and must be able to
support the load without buckling.
At maximum rotation, the contacting segment of the beam extends to Point D on
the contact surface, as defined by the parameter θ s 2 (see Figure 6.2(b)). This parameter
must be defined by the position of the flexure in the upper bound condition, since the
flexure contacts the highest percentage of the surface in this condition. The
67
profile of the contact surface after this point is no longer a constant radius, but is a curve
defined by the linearized equation for the deflection of a cantilever beam
y=
Fp x 2
6 EI
(3L − x)
(6.25)
where the origin is located at Point A, the x-axis is tangent to constant radius section of
the contact surface, and Fp is equal to
⎛ EI ⎞⎛ 1
F p = ⎜ ⎟⎜ '
⎝ R' ⎠⎜⎝ l f
⎞
⎟
⎟
⎠
(6.26)
In the absence of lateral loads, the curvature of this profile matches the curvature
of the non-contacting segment of the beam without exerting any force on it. When lateral
loads are present this section of the contact surface prevents the beam from deflecting
past its maximum rotation position. The contact surface provides a stop for the beam,
limiting the lateral translation and helping to prevent buckling. Once a beam is in contact
with the surface its boundary condition becomes similar to that of a fixed-pinned beam.
This condition is over eight times more resistant to buckling than the fixed-free condition
[3]. A conservative approximation assumes that the load is borne by a single beam, in
which case the critical load is
2π 2 EI
Pcr =
l 2f
(6.27)
Some lateral displacement can occur when the beam is not yet in contact with the
entire contact surface. The maximum lateral displacement condition, shown in Figure
6.12, occurs when the compressive forces cause the beam’s end to slide along the cam
surface to its initial position, and deflect the beam until it contacts the entire surface. The
angle of rotation when this condition is possible is given by
68
Secondary Stop
Beam contacting entire surface.
Beam end at initial position on cam surface.
Figure 6.12: Normal position (dashed lines) and maximum displacement position.
⎧⎪ y + l ' sin[θ + tan −1 ( F l ' 2 / 3EI )] ⎫⎪
b
f
s2
p f
θ l = sin ⎨
⎬
δ c + h / 2 − Rc
⎪⎩
⎪⎭
−1
(6.28)
and the resulting lateral displacement is
2
δ l = Rr − {xb + l 'f cos[θ s 2 + tan −1 ( F p l 'f / 3EI )] + (δ c + h / 2 − Rc ) cos θ l }
(6.29)
Should the lateral displacement ever reach the maximum allowable value a
secondary stop, shown in Figure 6.12, is provided between the contact surface and the
outside pin surface. This would prevent additional displacement, though it would also
introduce friction between the two surfaces.
6.4 NUMBER OF FLEXURES
Determining the number of flexures for a CCAR joint depends primarily on the
rotation and the torque characteristics desired for the design. As the radius of the cam
surface, Rc, increases, the maximum possible rotation of the joint increases as well.
However, this also decreases the thickness of the material between the pin’s cam
surfaces, as shown in Figure 6.13. If the minimum thickness is too small for a given value
69
Figure 6.13: Effect of cam surface radius on pin.
of R c , the number of flexures can be decreased, thereby increasing the minimum
thickness. Fewer flexures, however, will also decrease the torque. Conversely, adding
flexures will increase the torque, but may require that the value of Rc be decreased,
decreasing the rotation of the joint. The general guideline, therefore, is that more flexures
should be used for designs requiring high torque and small rotation, and fewer flexures
for designs requiring low torque and large rotation.
6.5 MODEL VALIDATION
Validation of the PRBM analysis was done using finite element analysis (FEA),
and by testing a macro-scale prototype. The torque-deflection curve for the macro-scale
design was found using the PRBM analysis, as discussed in Section 6.3. The torquedeflection curve was also found using FEA, as shown in Figure 6.14. The FEA mesh
Figure 6.14: FEA model with contact elements.
70
included 2671 nodes, and used the PLANE183 element, a higher order 2-D, 8-node
element. The PLANE 183 element has large deflection and large strain capabilities, is
well suited to modeling irregular meshes, and has two degrees of freedom at each node
(translation in the x and y directions) [25]. Two degrees of freedom were sufficient for the
CCAR joint analysis, and at least two dimensions were necessary for the creation of
contact elements. TARGE169 and CONTA172, 2-D contact elements, were used to
model the interaction between the flexure and the pin, and between the flexure and the
contact surface.
The flexure was constrained to have no translation at its fixed end, the contact
surface was constrained to have no translation along its bottom edge, and the section of
the pin was constrained to rotate about the pin’s center. A force was then applied to the
pin, creating a torque, and the resulting deflections and stresses were computed.
Finally, a physical prototype (Figure 6.15) was manufactured and tested. Figure
6.16 shows the results. The PRBM and FEA predictions are very close, and have a
maximum error of only 5.4%. More variation (up to 35.6% error) is seen in the measured
values. This variation is most likely due to the variation and nonlinearity of the material
Figure 6.15: Prototype of the CCAR joint.
71
5
4.5
PRBM Prediction
FEA Prediction
Measured Values
4
Torque (in-lb)
3.5
3
2.5
2
1.5
1
0.5
0
0
5
10
15
Degrees of Rotation
20
25
30
Figure 6.16: Results of PRBM predictions, FEA predictions, and prototype testing.
properties of polypropylene, and to machining tolerances. These results give confidence
to the PRBM predictions.
6.6 RESULTS
Table 6.1 lists the dimensions used for the drive and gate rotor meso-scale
designs, and Figure 6.17 shows the scaled polypropylene prototypes of these designs. The
drive rotor CCAR joint has more flexures to increase its torque, and the gate rotor design
has less in order to increase its rotation.
Table 6.1: Design dimensions (all values are in inches and degrees).
Drive Rotor
Gate Rotor
Rp
Rr
0.05 0.019
0.05 0.019
h
b
rQ
Rc
Rs
δc
0.00325 0.2522 0.01045 0.00321 0.1
0.0033
0.0055 0.1915 0.01045 0.002
0.0521 0.0022
72
n
6
4
Figure 6.17: Prototypes of the (a) drive rotor CCAR joint, and (b) gate rotor CCAR joint.
Table 6.2 lists the results. The nominal torque curves closely match the torque
requirements. The nominal maximum torque is equal to the desired maximum torque
for both the designs. The nominal minimum torque for the drive rotor is 98% of the
desired value, and for the gate rotor it is 94% of the desired value. The upper and lower
bounds for the maximum torque range from 56% to 194% of the desired value for the
drive rotor, and 44% to 195% of the desired value for the gate rotor.
Table 6.2: (a) Drive rotor results, and (b) gate rotor results.
(a)
Min
Torque
(in-lb)
Max
Torque
(in-lb)
δl
Safety
Factor
Min Rotation
Position
(deg)
Max Rotation
Position
(deg)
% of
Surface
Contacted
14.85
14.85
14.85
22.85
22.85
22.85
26.0
64.4
0
0.0010
0.0006
0.0014
1.15
1.02
1.35
δl
Safety
Factor
Nominal
0.0133 0.0272
Upper Bound 0.0230 0.0527
Lower Bound 0.0061 0.0152
(in)
(b)
Min
Torque
(in-lb)
Nominal
Max
Torque
(in-lb)
0.00097 0.00205
0.00191 0.00400
Lower Bound 0.00040 0.00090
Upper Bound
Min Torque
Position
(deg)
Max Torque
Position
(deg)
% of
Surface
Contacted
32
32
32
47
47
47
0
18.4
0
73
(in)
0.0019
0.0014
0.0024
1.39
1.17
1.99
Figures 6.18 and 6.19 show the nominal torque-deflection curve as well as the
lower and upper bounds for the torque. The nominal values in these designs are more
linear than in previous designs. As the flexures contact the adjacent contact surfaces,
the torque-deflection relationship becomes very nonlinear. In these designs, however, the
radii of the contact surfaces were decreased, resulting in the flexures contacting a smaller
percentage of the surface at the maximum rotation of the joint (indicated by the “% of
Surface Contacted” values in Table 6.2). The torque curves, therefore, are more linear.
This is necessary because the flexures always contact a higher percentage of the surface
in the upper bound condition than in the nominal condition. If the flexures contact a high
percentage of the surface in the nominal condition, then the upper bound condition
flexures will contact even more of the surface and cause the torque curve to become very
nonlinear, resulting in very high torque.
0.06
Torque (in-lb)
Nominal Values
0.05
Lower Bound
0.04
Upper Bound
0.03
0.02
0.01
0
0
5
10
Degrees of Rotation
15
20
Figure 6.18: Effect of tolerances on the drive rotor CCAR joint.
74
25
0.005
Nominal Values
Lower Bound
Torque (in-lb)
0.004
Upper Bound
0.003
0.002
0.001
0
0
5
10
15
20
25
30
35
40
45
50
Degrees of Rotation
Figure 6.19: Effect of tolerances on the gate rotor CCAR joint.
If the flexures in the upper bound condition contact the entire surface before
reaching the maximum rotation position, then the joint will be unable to complete its
specified rotation. This is illustrated in Figure 6.20. The design used in Figure 6.20 has a
large contact surface radius, and in the nominal condition the flexures contact 66% of the
surface at the maximum rotation of 22.85 degrees. In the upper bound condition,
0.12
Torque (in-lb)
Nominal Values
0.1
Lower Bound
0.08
Upper Bound
0.06
0.04
0.02
0
0
5
10
Degrees of Rot at ion
15
20
25
Figure 6.20: Design with high percentage of flexure length in contact with surface.
75
however, the flexure contacts 100% of the surface at only 21.35 degrees of rotation. The
torque is very high, and the joint is unable to rotate the full 22.85 degrees.
By lowering the contact surface radius in the drive and gate rotor design this
problem is avoided. The cost of doing so is that the safety factors are lowered as well.
The lowest safety factor is in the upper bound condition of the drive rotor, which has a
safety factor against yielding that is just above 1. Exceeding the yield strength of the
material, however, would only result in some local deformation in the flexures, and not in
catastrophic failure. Flexure deformation would lower the output torque of the joint. In
the upper bound condition this would bring the output torque closer to the desired torque
values, and would not be detrimental to the design. The lower bound condition, where
decreased torque would be most problematic, also has the highest safety factor.
Table 6.2 lists the values for δ l , the maximum lateral displacement. These values
do not represent the actual displacement due to the lateral loads given in Table 1.1, but
represent the maximum possible displacement before the contact surfaces constrain
further deflection and lateral displacement. The actual displacement is most likely less
than this value. The drive rotor joint has a nominal maximum lateral displacement equal
to the maximum allowable displacement specified in Table 1.1. The nominal maximum
lateral displacement for the gate rotor joint is almost twice the maximum allowable value.
Should the actual lateral displacement reach the maximum allowable value, the
secondary stop between the outer surface of the pin and the inner surface of the joint
would prevent further displacement. The nominal distance between these two surfaces is
equal to the maximum allowable displacement, 0.001 inches. If the surfaces contact,
76
some of the load would be transferred from the flexures to the surface, constraining
further deflection but introducing some friction.
6.7 CONCLUSIONS
A unique joint capable of replacing both bearings and springs has been presented,
and a model for predicting its behavior developed and validated. The contact surfaces in
the CCAR joint allow for larger deflections than could be obtained without contact
interactions, and give it a high lateral stiffness. The nominal torque values closely match
the torque requirements, the nominal lateral deflection is within the allowable range, and
the available design space is not exceeded. Nominal safety factors against yielding are
1.15 for the drive rotor, and 1.39 for the gate rotor.
77
78
CHAPTER 7
7
CONCLUSIONS
Four unique compliant components for replacing bearings and/or springs have
been presented. Table 7.1 rates each of the components for replacing bearings by the
Moon, Trease, and Kota criteria [5] discussed in Chapter 2. Contact interactions help all
of the components to have a large range of motion, low stress concentrations, and high
off-axis stiffness. All of the components have pure rotation without axis drift except the
CORE, which does experience some axis drift due to its cycloidal motion. All of
them are compact enough to fit within the tight design space available for Sandia’s
application except the CORE bearing. The CORE bearing can be made more compact,
however, by using a different manufacturing process such as LIGA.
Table 7.2 lists which components meet the requirements for the Stronglink
application. All of the components are scalable, they all fit within the design space
(assuming the CORE bearing uses the LIGA process), they are all able to be
manufactured by planar fabrication methods, and can all obtain the required rotation.
Though the serpentine flexure is unable to bear significant lateral loads, it can meet the
torque requirements, and is a good candidate for replacing springs. The CORE, CORE
bearing, and elliptical CORE bearing can all bear high lateral loads, and are good
79
Table 7.1: Flexible revolute joints.
Range of
Motion
Axis Drift
Stress
Concentration
Off-Axis
Stiffness
Compactness
(X: Poor, ∆: Normal, {: Good)
CORE
{
∆
{
{
{
CORE
Bearing
{
{
{
{
∆
Elliptical
CORE
Bearing
{
{
{
{
{
CCAR
Joint
{
{
{
{
{
candidates for replacing bearings. Though they aren’t able to meet the torque
requirements in the Stronglink application, they can have a resulting torque and may be
able to replace springs in other applications. The CCAR joint meets all of the
requirements, and can replace both bearings and springs.
In summary, all of the components are good candidates for replacing bearings
and/or springs, and all of the components meet the objectives of this thesis.
80
Table 7.2: Functional requirements.
Scalable
Fits in Design
Space
Planar
Fabrication
Obtains Required
Rotation
Can Replace
Bearings
Can Replace
Springs
X: Doesn’t meet criterion.
∆: Meets criterion in some applications, but not in
the Stronglink application.
{: Meets criterion in the Stronglink application.
Serpentine
Flexure
{
{
{
{
X
{
CORE
{
{
{
{
{
∆
CORE
Bearing
{
{
{
{
{
∆
Elliptical
CORE
Bearing
{
{
{
{
{
∆
CCAR
Joint
{
{
{
{
{
{
81
82
REFERENCES
8
[1]
Norton, R. L., 1998, Machine Design, Prentice-Hall, Upper Saddle River, NJ.
[2]
Kennedy, J. A., 2003, “Compliant, In-Plane Ratchet and Pawl Micromechanisms
for Safety Applications,” M.S. thesis, Brigham Young University, Provo, UT.
[3]
Howell, L. L., 2001, Compliant Mechanisms, John Wiley & Sons Inc., NY.
[4]
http://www.sandia.gov/mstc/technologies/micromachines/techinfo/technologies/summit5.html
[5]
Moon, Y., Trease, B. P., and Kota, S., 2002, “Design of Large-Displacement
Compliant Joints,” Proceedings of the 2002 Design Engineering Technical
Conferences, DETC2002/MECH-34207.
[6]
Paros, J. M., and Weisbord, L., 1965, “How to Design Flexure Hinges,” Machine
Design, Nov. 25, pp. 151-156.
[7]
Kyusojin, A., and Sagawa, D., 1988, “Development of Linear and Rotary
Movement Mechanisms by Using Flexible Strips,” Bulletin of Japan Society of
Precision Engineering, Vol. 22, No. 4, Dec., pp. 309-314.
83
[8]
Bona, F., and Zelenika, S., 1994, “Precision Positioning Devices Based on Elastic
Elements: Mathematical Modeling and Interferometric Characterization,”
Seminar on Handling and Assembly of Microparts, Nov., Vienna.
[9]
Smith, S., 2000, Flexures, Elements of Elastic Mechanisms, Gordon and Breach
Science Publishers.
[10]
Weinstein, W. D., 1965, “Flexural Pivot Bearings,” Machine Design, June
10, pp. 150-157.
[11]
Goldfarb, M., and Speich, J. E., 1999, “ A Well-Behaved Revolute Flexure Joint
for Compliant Mechanism Design,” Journal of Mechanical Design, Trans.
ASME, Vol. 121, No. 3, pp. 424-429.
[12]
Fedder, G., 1994, “Simulations of Microelectromechanical Systems,” PhD thesis,
UC Berkley, pp. 85-86.
[13]
Mankame, N. D., Ananthasuresh, G. K., 2002, “Contact Aided Compliant
Mechanisms: Concept and Preliminaries,” Proceedings of the 2002 ASME Design
Engineering Technical Conferences, DETC2002/MECH-34211.
[14]
Guérinot, A. E., 2003, “Compliant Mechanisms Subjected to Compressive
Loads,” M. S. thesis, Brigham Young University, Provo, UT.
[15]
Votta, F.A., 1952, “Theory and Design of Long-deflection Constant Force Spring
Elements,” Transaction of the ASME, Vol. 74, pp. 439-450.
[16]
Collins, C. L., 2003, “Kinematics of Robot Fingers with Circular Rolling Contact
Joints,” Journal of Robotic Systems, Vol. 20, Issue 6, pp. 285-296.
84
[17]
Chironis, N. P., and Sclater, N., 1996, Mechanisms and Mechanical Devices
Sourcebook, 2nd Ed., McGraw-Hill, NY.
[18]
Jeanneau, A., Herder, J., Laliberte, T., and Gosselin, C., 2004, “A Compliant
Rolling Contact Joint and its Application in a 3-DOF Planar Parallel Mechanism
with Kinematic Analysis,” Proceedings of the 2004 ASME Design Engineering
Technical Conferences, DETC2004-57264.
[19]
Ford, J. P., 1969, “Rolamite Fundamentals,” First Symposium on Rolamite,
University of New Mexico Press, Albuquerque, NM.
[20]
Hille, E., Salas, S.L., and Etgen, G. J., 1995, Salas and Hille’s Calculus: One and
Several Variables, John Wiley and Sons Inc., NY.
[21]
McKean, H., and Moll, V., 1997, Elliptic Curves, Cambridge University Press,
NY.
[22]
Silverman, J. H., and Tate, J., 1992, Rational Points on Elliptic Curves, SpringerVerlag, Berlin.
[23]
Byrd, P. F., and Friedman, M. D., 1954, Handbook of Elliptic Integrals for
Engineers and Physicists, Springer-Verlag, Berlin.
[24]
Benavides, G.L., Bieg, L.F., Saavedra, M.P., and Bryce, E.A., 2002, “High
Aspect Ratio Meso-Scale Parts Enabled by Wire Micro-EDM,” Microsystems
Technologies Journal, Springer-Verlag, Vol. 8, Number 6, Sept 2002.
[25]
ANSYS Release 8.0 Documentation, 2003, ANSYS Element Ref.> Element
Library> PLANE183, SAS IP Inc.
85