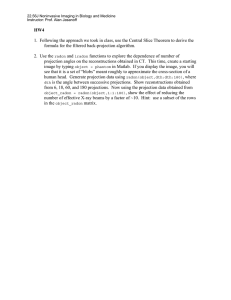
Fundamentals of 2D and 3D CT reconstruction Dr. Günter Lauritsch 2 Reconstructive Methods detector Data acquisition system source object Set of digital projection images reconstruction Tomographic slice images algorithm 3-D image Measured sinogram 1 3 ! Introduction ! Mathematical background of 2D CT ! 2D fan beam data acquisition ! Spiral CT from 2D towards 3D ! Recent technical developments and clinical images ! Fully 3D imaging ! 3D circular cone-beam CT 4 Measuring line integrals of attenuation coefficients µ A x-ray beam traveling along line j is attenuated by the object according to Beer’s law for the photon intensities I collimated x-ray source I0 r I j = I 0 ⋅ exp − ∫ µ ( r ) dl line j The photon intensities I are preprocessed to projection data p p j = − ln Ij I0 = r ∫ µ (r )dl Ij line j Thus we have to solve a set of integral equations for the attenuation coefficients µ. detector 2 5 CT-numbers of tissue in Hounsfield units (HU) 3000 Blood Liver 60 Spleen 40 Tumor Kidneys Heart Pancreas Bone Bladder Adrenal Gland Intestine Water 0 -100 CT - number = Mamma -200 µ − µ water ⋅1000 µ water Fat -900 Air Lung -1000 6 Inverse Problems Given p (measurement data), system characterizing operator A, find µ (object) such that p = A µ. Usually ill-posed problems: • A-1 does not exist • Solution is not unique • Solution is unstable Task: Find reasonable approximation to solution! Analytical methods • First find analytical solution µ~(x) =∫dx' k( x') ⋅ p(x−x') with filter kernel k. Algebraic methods • First discretize imaging process pi =∑ Aij µj j • Then discretize. • Then invert system matrix Aij. Typical for CT, example Radon transform Typical for SPECT bioelectric/-magnetic imaging 3 7 ! Introduction ! Mathematical background of 2D CT ! 2D fan beam data acquisition ! Spiral CT from 2D towards 3D ! Recent technical developments and clinical images ! Fully 3D imaging ! 3D circular cone-beam CT 8 Single slice CT in sequence mode collimated X-ray source In sequence mode the moving X-ray source and detector define an image plane x y → 2D problem detector with one row 4 9 2D Radon transform ℜ The analytical approach of reconstruction by projections has to be done in the context of the Radon transform ℜ r r r r ℜµ ( ρ , θ ) = ∫ d 2 r δ ( r ⋅ θ − ρ ) ⋅ µ ( r ) = +∞ r r ∫ dl µ ( ρ ⋅θ + l ⋅θ ⊥ y line integral normal vector r θ ) −∞ Thus in the 2D case the Radon transform ℜµ is identical to the projection data p r θ⊥ distance ρ r p ( ρ , θ ) = ℜµ ( ρ , θ ) x θ r cos θ sin θ θ = with projection angle θ. 10 Sinogram θ The representation of the projection data p ( ρ , θ ) r (Radon transform ℜµ ( ρ , θ )) in a ρ-θ-diagram is called sinogram. A point in spatial domain appears as a sinusoidal curve in the sinogram. ρ 5 11 2D Radon data of a parallel projection Radon data are represented by a point in Radon space by the correspondence of the position vector: r ! direction → normal vector θ ! length → distance ρ array of parallel x-ray beams y r θ An array of parallel x-ray beams with projection angle θ samples r Radon data along the axis θ perpendicular to the direction of the x-ray beams hitting the origin of the coordinate system. x Thus parallel projections of an angular range of π (180°) would cover complete object information. corresponding Radon data 12 Fourier- or central slice theorem in 2D r r Fρ ℜµ ( ρ ,θ ) = ( F2 µ )(ω ρ ⋅θ ) The radial 1D Fourier transform Fρ of the Radon transform ℜµ r along θr is equal to the 2D Fourier transform F2 of the object µ along θ perpendicular to the direction of the projection. y r θ array of parallel x-ray beams ωy r θ ωx x radial Fourier transform Radon space Fourier domain 6 13 Relationship between spatial-, Fourier- and Radon-domain r µ (r ) spatial domain 2D Radon transform 2D Fourier transform radial 1D Fourier transform r ℜµ (ρ ,θ ) Radon domain (F2 µ )(ωr ) = (F2 µ )(ω ρ , ωθ ) Fourier domain 14 Direct Fourier methods ! sample projection data p(ρ,θ) in an angular range θ ∈ [θ 0 , θ 0 + π ] r ! 1D Fourier transform of each projection Fρ p ( ρ , θ ) = Fρ ℜµ ( ρ , θ ) ⇒ yields (F2 µ )(ω ρ , ωθ ) 2D Fourier transform of object distribution µ on a polar grid ! 2D Fourier inverse transformation µ ( x, y ) = θ 0 +π ∫ θ0 dωθ ωy +∞ ∫ dω ρ −∞ ( F2 µ )(ω ρ , ωθ ) ⋅ ω ρ ⋅ e i 2πω ρ ( x cos ωθ + y sin ωθ ) ramp filter due to polar coordinate system ωx Fourier domain 7 15 Direct Fourier methods using FFT 2D Fourier inverse transform F2−1 ( F2 µ )(ω x , ω y ) = µ ( x, y) by Fast Fourier Transforms (FFT) ωy ωy ωx ωx resampling onto a Cartesian grid by interpolation (numerically sensitive) polar grid Cartesian grid 16 Inverse Radon transform in 2D r 1 r µ ( r ) = − 2 ∫ dθ 4π = r r r 1 ℜµ ( ρ , θ ) 1 ∫ dρ (rr ⋅θr − ρ )2 = − 4π 2 ∫ dθ ℜµ ( ρ ,θ ) ∗ ρ 2 ρ =rr⋅θr r 1 r −1 dθ Fρ ω ρ Fρ ℜµ ( ρ ,θ ) ∫ 2 backprojection r r ρ = r ⋅θ ramp filtering in Fourier domain ω ρ = sign ω ρ ⋅ ω ρ Hilbert trafo convolution with distribution kernel in spatial domain projection data p(ρ,θ) derivative Note, that due to the non-local behavior of the ramp filter in spatial domain the projection data must not be truncated in ρ-direction. 8 17 Filtered backprojection (FBP) For each projection do: ! apply a ramp-like filter reconstruction (image) plane (either in spatial domain as a convolution or in Fourier domain as a multiplication) ! backproject filtered projection data projection p(ρ,θ) (accumulate contributions of all projections) Image quality can be adjusted with the filter kernel. smearing back the filtered projection data along projection line filtered projection data ~ p ( ρ ,θ ) 18 Ram-Lak kernel (Ramachandran & Lakshminarayanan, 1971) discrete in spatial domain continuous in Fourier domain from Morneburg 1995 ~ ~ H (ω ρ ) = Fρ h ( ρ ) ω ρ ,ny Characteristics of image results: ! sharp edges ! sensitive to noise ωρ 1 ωρ ~ H (ωρ ) = ωρ ⋅ rect ⋅ 2 ω ρ ,ny 9 19 Shepp-Logan kernel (Shepp & Logan, 1974) continuous in Fourier domain ~ ~ H (ω ρ ) = Fρ h ( ρ ) from Morneburg 1995 discrete in spatial domain ω ρ ,ny Characteristics of image results: ! smoothed edges ! more robust to noise ωρ 1 ωρ ω ~ ⋅ sinc π ⋅ ρ H (ωρ ) = ωρ ⋅ rect ⋅ 2 ω ρ ,ny 2 ω ρ , ny 20 ! Introduction ! Mathematical background of 2D CT ! 2D fan beam data acquisition ! Spiral CT from 2D towards 3D ! Recent technical developments and clinical images ! Fully 3D imaging ! 3D circular cone-beam CT 10 21 Data acquisition in fan beam geometry collimated collimated X-raysource source X-ray Commercial scanner of the third generation acquire data in a fan beam geometry. detector with one row detector with one row 22 2D fan beam geometry Coordinates in parallel beam geometry: θ ρ normal vector of particular line distance to origin of coordinate system x-ray focus y Coordinates in fan beam geometry: φ β angle of x-ray source position fan angle of particular line normal θr 1 vectors r θ2 β φ fan angle projection angle Coordinate transformation: π p(θ , ρ ) → p fan (φ , β ) distance ρ ce ntr a l ra y +β 2 r ρ = − rfocus ⋅ sin β θ =φ + x 11 23 Reconstruction methods for fan beam geometry ! Rebinning ! Resampling of fan beam to parallel beam (requires additional interpolations) ! Application of reconstruction for parallel beam (requires waiting time for acquisition of many projections) ! Reformulation of the inverse Radon transform by a coordinate transformation from parallel to fan beam geometry ! Direct inversion 24 Rebinning of fan beam to parallel beam To synthesize a parallel projection of angle θ find all rays such that θ =φ + π + β = const. +3 +3 +2 +1 +1 +2 y 2 For this projections are needed of the angular range φ ∈ [θ − β max ,θ + β max ] 0 -1 -2 -1 -3 -2 -3 x With βmax as maximum fan angle β max = arcsin focus R FOV R focus βmax Rfocus RFOV field-of-view (FOV) 12 25 Reformulation of the inverse Radon transform r µ (r ) = − r µ (r ) = − r 1 1 4π 2 ∫ dθ ρ 2 r ∗ ℜµ ( ρ , θ ) ρ = rr⋅θr original formula R 1 1 dφ r r focus 2 ⋅ 2 ∗ (cos β ⋅ p fan (φ , β ) ) 4π 2 ∫ sin β r − r focus (φ ) r r r β = β ( r ), such that ρ = r ⋅θ 1/R2-weighting in backprojection → increase of computational expense cos-weighting of projection data convolution equivalent to ramp filtering 26 Convolution Kernels Sharp Spatial Resolution ULTRA HIGH B60f ramp HIGH STANDARD Smooth B20f SOFT Noise SOFT DETAIL Low High Classification scheme. Tradeoff: spatial resolution ↔ noise Fourier transform of some exemplary convolution kernels for body scans (B) in ultrafast mode (f) 13 27 Convolution kernel B20f (soft) C=-700, W=800 C=10, W=200 The soft kernel B20f is appropriate for soft tissue imaging with a good contrast resolution. For displaying the lung parenchyma the image is too smooth. 28 Convolution kernel B60f (high) C=-700, W=800 C=10, W=200 The sharp kernel B60f is appropriate for lung imaging with a good spatial resolution. For displaying the soft tissue the image is too noisy. 14 29 2D Radon data of a fan beam projection A particular x-ray focus position acquires Radon data on a circle in Radon space. The circle is characterized by ! diameter R focus ! x-ray position and origin are lying on circle line y x . For R focus → ∞ the fan beam geometry converges into the parallel case. Radon data x-ray focus 30 Sufficiency condition in fan beam geometry Fan beam projections of an angular range of π (180°) do not cover complete object information. The angular range has to be extended to π + 2 ⋅ β max Care has to be taken of data redundancies, since some but not all Radon data are acquired twice (unless angular range equal 2π). y missing data 2βmax x field-of-view (FOV) 15 31 Correction of data redundancies by Parker weighting (Parker 1982) φ Although the degree of redundancies is a discontinuous step function, correction has to be done by a smooth weighting data function. π+2βmax π redundancies E.g. Parker’s weight for the lower triangular region π φ w(φ , β ) = sin 2 ⋅ 2 β max − β for 0 ≤ φ ≤ 2( β max − β ) and similar expression for the upper one. 2βmax β (φ,β)-representation 32 Local sufficiency condition (super short-scan) An object point r can be reconstructed exactly if it sees a scan path segment of angular range π. Thus, an ROI can be reconstructed without acquiring complete data of the object (super shortscan). Specific algorithms are needed for reconstruction from a super short-scan " F. Noo et al., BMP 2002 " H. Kudo et al., IEEE NSS 2002 y object x point r π PI-line scan path segment sufficient for reconstruction of point r 16 33 Examples of super short-scan trajectories and associated region-of-interests from F. Noo, M. Defrise, R. Clackdoyle, and H. Kudo, “Image reconstruction from fan-beam projections on less than a short scan”, Physics in Medicine and Biology 47 (2002) 2525-2546 34 How an algorithm builds up a reconstructed image " Contours are recovered relatively early. " Artifacts of low spatial frequencies which significantly disturb contrast resolution are removed just at the end when data acquisition is complete. 17 35 ! Introduction ! Mathematical background of 2D CT ! 2D fan beam data acquisition ! Spiral CT from 2D towards 3D ! Recent technical developments and clinical images ! Fully 3D imaging ! 3D circular cone-beam CT 36 Single slice CT in spiral mode In the patient coordinate system the x-ray source and the detector move on a spiral. collimated X-ray source z x In spiral mode the moving X-ray source and detector do not define an image plane any more. → 3D problem detector with one row patient coordinate y system continuous table movement 18 37 Reduction to a 2D reconstruction problem In a single row scanner there are always projection data at zpositions z(φ) close to the image plane at zimage. Therefore 2D projection data p2D(φ,β) can be synthesized by interpolation between spiral data pspiral of equivalent projection angle which are acquired on opposite sides of the image plane p 2 D (φ , β ) = z w ⋅ p spiral (φ ′, β ) + (1 − w) ⋅ p spiral (φ ′ + 2π , β ) ( for a given projection angle nearest x-ray focus position on opposite side of the image plane ) with weight w ≡ w z (φ ′) − z focus , φ = mod 2π φ ′ and z (φ ′) − z image ≤ pitch ⋅ N ⋅ ∆z 38 Benefits of spiral CT " Fast scanning of large anatomical volumes " Gapless data acquisition during one breathhold " no missing lesions " increase of zresolution in MPR’s by overlapping reconstruction from Kalender 2000 " Retrospective reconstruction with arbitrary slice increments 19 39 Multi slice CT The increased number of detector rows can be used for larger volume collimated X-ray source z x shorter scan time improved z-resolution patient coordinate y system continuous table movement With increasing cone angle more and more sophisticated reconstruction algorithms are required to provide good image quality. further increase of the number of detector rows 40 “Moore’s Law” for CT? Will the race for more slices go on? So far: doubling every 2.5 years Sensation 64 Adaptive Multiple Plane Reconstruction (AMPR) Schaller, Flohr et al 2000 Adaptive Axial Interpolation Schaller, Flohr et al 1998 20 41 Advanced Single Slice Rebinning Algorithm (ASSR) The image plane is tilted to minimize the mean z-distance of the image plane to the x-ray source positions contributing to a shortscan. Thus 2D projection data for the tilted image plane can be synthesized properly. After 2D reconstruction of a bunch of image planes with different tilt angles ordinary axial slices are achieved by reformatting. z-axis z-axis contributing source positions plane tilted image 12 detector rows, pitch 1.5 (18) projection of scan geometry 42 “Moore’s Law” for CT? Will the race for more slices go on? 3D Backprojection with Opt. Filter + Weighting (R3D-FBP) Stierstorfer, Bruder, Rauscher et al 2002 Segmented Multiple Plane Reconstruction (SMPR) Stierstorfer, Bruder et al 2001 Sensation 64 Adaptive Multiple Plane Reconstruction (AMPR) Schaller, Flohr et al 2000 Adaptive Axial Interpolation Schaller, Flohr et al 1998 21 43 First steps to fully 3D: 3D Filtered Backprojection (R3D-FBP) z ! So far all reconstruction algorithms were a reduction of the 3D problem to a 2D one. ! Simple, approximate 3D solution: slice profile filter direction ! filter detector image in the direction of the spiral tangent ! 3D backprojection ! weighted and normalized accumulation according to a user defined slice profile tangent 44 Image quality of the R3D-FBP algorithm Clock phantom 64-row detector of 1mm collimation, pitch 1.0 (64), axial images SMPR R3D-FBP exact Due to the approximations in filtering and data accumulation some artifacts remain in R3D-FBP. The ultima ratio is an exact 3D algorithm. 22 45 What is the clinical benefit of ultra-fast spiral scanning? Scan time of the entire thorax (350mm) at a 0.75mm collimation 100 sec breath hold time 10 sec Single slice 16 slice 128 slice Beyond the threshold of the breath hold time there is no huge clinical benefit foreseen for further reducing the scan time. 46 Focus on increased isotropic spatial resolution with Siemens’ scanner SOMATOM Sensation 64 Double z-sampling 0.6 0,6 mm 0,6 mm Oversampling Z ! 64 slices per rotation ! Routine 0.4 mm ! 64-slice high speed data isotropic resolution, with no increase in dose 32 x 0.6 mm 64 Channel Electronics 32 Slice Detector 3264 Slice Detection Slice DAS acquisition electronics with 2.5 Gbit/s (>500 DVD players in parallel) 23 47 Headline SOMATOM Sensation 64 33 sec for 1570 mm 64 x 0.6mm Resolution 0.4 mm Rotation 0.5sec 120 kV / 148mAs Courtesy of University of Erlangen and University of Tübingen 48 SOMATOM Sensation 64 10sec for 165mm 64 x 0.6mm (2x32) Resolution 0.4 mm Rotation 1 sec 120 kV / 450mAs Courtesy of University of Erlangen, Department of Radiology and Institute of Medical Physisc 24 49 SOMATOM Sensation 64 22sec for 260mm 64 x 0.6mm (2x32) Resolution 0.4mm Rotation 0.33 sec 120 kV / 760mAs Heart rate 95bpm Courtesy of University Medical Center Grosshadern, Munich, Institute of Clinical Radiology 50 Headline SOMATOM Sensation 64 22sec for 260mm 64 x 0.6mm (2x32) Resolution 0.4mm Rotation 0.33 sec 120 kV / 760mAs Heart rate 95bpm Courtesy of University Medical Center Grosshadern, Munich, Institute of Clinical Radiology 25 51 SOMATOM Sensation 64 11sec for 144 mm 64 x 0.6mm (2x32) Resolution 0.4 mm Rotation 0.37 sec 120 kV / 500 mAs Courtesy of University of Erlangen, Departments of Radiology and Cardiology DHZ Munich 52 Headline Calcified Lesion with soft plaque SOMATOM Sensation 64 11sec for 144 mm 64 x 0.6mm (2x32) Resolution 0.4 mm Rotation 0.37 sec 120 kV / 500 mAs 3mm Stent Courtesy of University of Erlangen, Department of Radiology and Cardiology DHZ Munich 26 53 SOMATOM Sensation 64 11 sec for 640 mm 64 x 0.6mm Resolution 0.4 mm Rotation 0.37 sec 120 kV / 150 mAs Courtesy of University of Erlangen and University of Tübingen 54 SOMATOM Sensation 64 SOMATOM Sensation 64 12 sec for 610 mm 64 x 0.6mm Resolution 0.4 mm Rotation 0.5 sec 120 kV / 150 mAs Conventional Angio Courtesy of University of Erlangen, Department of Radiology and Institute of Medical Physics 27 55 SOMATOM Sensation 64 11sec for 255mm 64 x 0.6mm (2x32) Resolution 0.4 mm Rotation 0.5 sec 120 kV / 90mAs Pediatric Patient Courtesy of University of Erlangen, Department of Radiology and Institute of Medical Physisc 56 ! Introduction ! Mathematical background of 2D CT ! 2D fan beam data acquisition ! Spiral CT from 2D towards 3D ! Recent technical developments and clinical images ! Fully 3D imaging ! 3D circular cone-beam CT 28 57 Fully 3D imaging in the “far” future The trend of increasing the number of detector rows might end in the use of a large area detector. For such a scanning device the approximation of a reduction to a 2D reconstruction problem (ASSR, AMPR, SMPR) will not hold any more. Even approximate methods like the R3D-FBP might be critical. Algorithms will be required fully considering the 3D scanning geometry. collimated X-ray source z x patient coordinate system y continuous table movement use of an area detector covering large volumes 58 n-dimensional Radon transform ℜ r r r r ℜµ ( ρ , θ ) = ∫ d n r δ ( r ⋅ θ − ρ ) ⋅ µ ( r ) 2D integration along a line 3D ... integration on a plane ... nD integration on a (n-1)-dimensional hyper plane 29 59 3D Radon data in cone-beam geometry rce det ect integration planes for generating Radon data or ys ou z con eo pa th f x- of x ray s - ra y x object x-ray source planes are sampled by fan-beams → only radial derivative of Radon data can be acquired (Grangeat 1991) → sufficient for reconstruction 60 Inverse Radon transform in 3D r µ (r ) = − 1 8π 2 r ∫ dθ backprojection r ∂2 ℜµ ( ρ ,θ ) 2 r r ∂ρ ρ = r ⋅θ plane integral of object Unlike the 2D case the inversion acts locally in the 3D Radon space. 30 61 Beginning of a completely novel analysis ! Fourier or central slice theorem in 3D ! Sufficiency conditions ! Tuy condition ! Concept of PI-lines ! Long object problem (axial truncation) ! Data redundancies ! Redundancies are obvious only when collecting 3D Radon data ! Efficient reconstruction algorithms ! Find FBP-type algorithms with spatially invariant 1D filtering ! .... 62 Alexander Katsevich’s exact reconstruction algorithm for cone beam spiral CT C=50HU W=420HU Reference image, reconstructed from SOMATOM Sensation 16 data Reconstruction from synthesized projection data with a virtual detector of 284 rows, pitch 1.35 (384) table feed per turn 192mm → 576mm/s (2.1km/h) 31 63 ! Introduction ! Mathematical background of 2D CT ! 2D fan beam data acquisition ! Spiral CT from 2D towards 3D ! Recent technical developments and clinical images ! Fully 3D imaging ! 3D circular cone-beam CT 64 Back to sequential scanning: Circular cone-beam CT collimated X-ray source A complete ROI can be scanned in a single rotation with a large area detector system. z The method of choice for circular cone-beam is the robust and efficient Feldkamp algorithm. However, one has to be aware that a circular scan does not provide a complete data set in cone beam geometry. x patient coordinate y system continuous table movement 32 65 Feldkamp algorithm r µ (r ) = horizontal 1D filtering 2π R focus ⋅ R focus − detector 1 dλ r r ∫ r r 2 ⋅ hramp (u ) ∗ (cos ϑ ⋅ pcone (λ ; u , v )) u ,v as projection of rr 2 0 r − r focus ⋅ (eu × ev ) ( data redundancy for full circle distance weighting ( ) row-by-row 1D filtering in horizontal direction with conventional ramp filter cosine weighting: R focus − detector cos ϑ = 2 R focus − detector + u 2 + v 2 ) Properties of the Feldkamp algorithm: " Image in mid-plane is exact (identical to fan beam case). " Average along z direction is exact. " Volume reconstruction is exact for objects homogenous in z. 66 Incomplete data sampling in pure circular scanning → cone artifacts z missing data y x Thorax simulation study. Coronal slice. C=0, W=200 3D Radon space for a circular scan Due to incomplete data sampling cone artifacts show up at sharp z-edges of objects with high contrast. These artifacts can be avoided by variations of the scan path only: e.g. circle+line, 2 tilted circles, sinusoidal (saddle), spiral, etc. 33 67 Dynamic volume imaging. Technique of the future? Applications foreseen ! Phase restricted CTA / dynamic vascular imaging ! Heart, brain and kidney continuously rotating source-detector assembly ! Volume Perfusion Heart, brain and kidney ! Partially liver and lung ! tube ! 3D Intervention ! Biopsy needle guidance ! Augmented reality detector prototype study, slow rotation speed, flat panel detector 68 3D reconstruction for interventional orthopedics / surgery Inexpensive, easily accessible imaging device in the operating room with a mobile C-arm system. Reconstructed slice images for control of the placement of screws etc. in osteosynthesis. Today, imaging of high contrast objects only. 34 69 3D reconstruction for interventional angiography Data acquisition directly in the intervention room before, during, or after treatment with a conventionally used angiographic device. Set of 2D projection data at a circular short scan trajectory with intra arterial contrast agent (inconsistent data!). 3D reconstruction of a carotis segment with a stent. 70 Superior spatial resolution of C-arm based imaging Due to the small pixel size of the radiographic and fluoroscopic flat panel detectors used (approx. 180µm) a better spatial resolution is achieved compared to conventional computed tomography. 35 71 C-arm based imaging towards low contrast Image quality of new C-arm devices might be improved towards low contrast resolution by " replacement of image intensifier by flat panel detectors " increased bit depth of the detector " increased number of projections " corrections of scatter, beam hardening, ringing, etc. 72 Courtesy of Dr. Loose, Klinikum Nürnberg-Nord 36 73 37