Progress in Energy and Combustion Science 36 (2010) 131167
Contents lists available at ScienceDirect
Progress in Energy and Combustion Science
journal homepage: www.elsevier.com/locate/pecs
Physical modelling and advanced simulations of gasliquid two-phase
jet flows in atomization and sprays
X. Jiang a, b, *, G.A. Siamas a, b, K. Jagus a, T.G. Karayiannis a
a
b
Mechanical Engineering, School of Engineering and Design, Brunel University, Uxbridge UB8 3PH, UK
Engineering Department, Lancaster University, Lancaster LA1 4YR, UK
a r t i c l e i n f o
a b s t r a c t
Article history:
Received 17 April 2009
Accepted 1 September 2009
Available online 21 October 2009
This review attempts to summarize the physical models and advanced methods used in computational
studies of gasliquid two-phase jet flows encountered in atomization and spray processes. In traditional
computational fluid dynamics (CFD) based on Reynolds-averaged NavierStokes (RANS) approach,
physical modelling of atomization and sprays is an essential part of the two-phase flow computation. In
more advanced CFD such as direct numerical simulation (DNS) and large-eddy simulation (LES), physical
modelling of atomization and sprays is still inevitable. For multiphase flows, there is no model-free DNS
since the interactions between different phases need to be modelled. DNS of multiphase flows based on
the one-fluid formalism coupled with interface tracking algorithms seems to be a promising way
forward, due to the advantageous lower costs compared with a multi-fluid approach. In LES of gasliquid
two-phase jet flows, subgrid-scale (SGS) models for complex multiphase flows are very immature. There
is a lack of well-established SGS models to account for the interactions between the different phases. In
this paper, physical modelling of atomization and sprays in the context of CFD is reviewed with
modelling assumptions and limitations discussed. In addition, numerical methods used in advanced CFD
of atomization and sprays are discussed, including high-order numerical schemes. Other relevant issues
of modelling and simulation of atomization and sprays such as nozzle internal flow, dense spray, and
multiscale modelling are also briefly reviewed.
2009 Elsevier Ltd. All rights reserved.
Keywords:
Modelling
Simulation
Atomization
Spray
Liquid Jet
Two phase
Direct numerical simulation
Large-eddy simulation
Contents
1.
2.
3.
4.
5.
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .133
Physical modelling of atomization and sprays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .135
2.1.
The spray equation in the Lagrangian approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
2.2.
Liquid atomization modelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
2.3.
Droplet kinematics, droplet/droplet and spray/wall interactions, and liquid-fuel evaporation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
LES of spray flow and combustion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .140
3.1.
Scale range separation, space filtering and mathematical formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
3.2.
Subgrid-scale models and linear eddy mixing model for combustion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
3.3.
Numerical issues for LES of spray flow and combustion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
DNS-like simulations of gasliquid two-phase flows for atomization and sprays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .149
4.1.
Overview of multiphase flow modelling for a DNS-like simulation of atomization and sprays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
4.2.
Interface tracking and reconstruction techniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
4.2.1.
VOF-type methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
4.2.2.
Level-set methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
4.3.
Modelling surface tension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
4.4.
High-order numerical schemes for DNS of atomization and sprays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Other relevant issues of modelling and simulation of atomization and sprays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .159
* Corresponding author. Mechanical Engineering, School of Engineering and Design, Brunel University, Uxbridge UB8 3PH, UK. Tel.: þ44 1895 266685; fax: þ44 1895
256392.
E-mail address: xi.jiang@brunel.ac.uk (X. Jiang).
0360-1285/$ see front matter 2009 Elsevier Ltd. All rights reserved.
doi:10.1016/j.pecs.2009.09.002
132
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
6.
5.1.
Modelling nozzle internal flow, hollow-cone sprays, dense sprays, and electrohydrodynamic (EHD) atomization . . . . . . . . . . . . . . . . . . . . . . . 159
5.2.
Multiscale modelling of atomization and sprays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .162
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
Nomenclature
a
A
Af ,Ap
AR
b
bR
B0 , B1
BM
c
C
CD
C p , Cv
Cs
Cn , C3
d
D
D
e
E
f
f
F
F
g
G
h
hv;s
H
I
k
kR
l
L
Lv
m
m, n
n, N
Nu
O
p
P
Pr
q
Q
Q_
r
R
Rc ; Rv
Re
S
Sc
parent droplet or blob radius
surface area
droplet/particle frontal area
Arrhenius kinetics constant
collision impact parameter
Arrhenius kinetics constant
‘‘wave’’ breakup model constants
mass transfer number
specific heat
constant
drag coefficient
specific heats at constant pressure and volume
Smagorinsky constant
constants in the subgrid turbulent kinetic energy
equation
particle cloud diameter
diffusion coefficient; energy dissipation rate; droplet
diameter; distribution function
rate of deformation tensor
specific total energy
error
function; flow variable
arbitrary vector field
fuel; force
force
specific body force (gravitational acceleration)
scalar in the level-set method
heat flux; heat transfer coefficient; grid size
evaporated enthalpy at droplet surface
heaviside function
specific internal energy; indicator function
turbulent kinetic energy
reaction rate
eddy size
large (integral) length scale
latent heat for vaporization
mass
unit normal vector
number
Nusselt number
oxidizer
probability
product; probability density function; weighted
projection
Prandtl number
random number between (0, 1); random scalar
heat transfer rate; storage locations
heat release source term
droplet radius
time rate of change of droplet radius; gas constant
carrier gas and vapor gas constants
Reynolds number
strain rate tensor; source term; surface area
Schmidt number
Sh
t
T
TA
Td
T_ d
u
U
v
v
V
Vol
w
w
W
_ s
W
We
x
X
xp
Xi
y
Y
y_
€
y
Z
Sherwood number
time
Taylor parameter; gas temperature
activation temperature
droplet temperature
time rate of change of temperature
gas-phase velocity vector
gas velocity at the liquid surface
particle velocity
droplet velocity vector
droplet volume; domain; diffusion velocity
volume of the cell
weighting
local relative velocity between the droplet and the
surrounding gas (v u)
molecular weight
subgrid turbulence effects due to spray
Weber number
droplet position vector
mole fraction; random number
particle centroid
droplet transient location
droplet distortion from sphericity
mass fraction
time rate of change of the droplet distortion
(oscillation velocity)
time rate of change of oscillation velocity
Ohnesorge number
Greek
a
b
c
d
d3
D
V
3
g
G
hK
k
q
l
L
m
n
n12
r
s
P
Q
s
f
F
(laminar) thermal diffusivity; linking parameter;
droplet variable
heat transfer correction coefficient
molar fraction
Kronecker delta function
smoothed delta function
incremental amount
gradient operator
dissipation rate of turbulent kinetic energy
drop radius ratio ðr1 =r2 Þ; ratio of specific heats
Fickian diffusion coefficient; interface
Kolmogorov scale
von Karman constant; curvature
diffusive mass flux
frequency of subgrid stirring; thermal conductivity
wavelength
dynamic viscosity
kinematic viscosity
collision frequency
density
surface tension
velocitypressure gradient correlation
viscous work
breakup time; wall shear stress; time scale
area flux
species mass flux; volume fraction
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
J
u_
u
U
U
space vector of random dependent variables
reaction rate
vorticity
growth rate of unstable surface wave; domain
particle rotation
Superscripts
0
beginning of time step
previous cell
þ
next cell
c
combustion
s
source terms due to spray effects
sgs
subgrid scale
ðxÞ
x-direction
Subscripts
@
at point
atm
atmospheric
body
body
bu
breakup
c
carrier gas
chem
chemical
coll
collision
crit
critical
d
droplets
1. Introduction
Gasliquid two-phase flows broadly occur in nature and environment, such as the falling of raindrops and various spray
processes. In practical applications, an important type of gasliquid
two-phase flows is a jet flow with an initial momentum driving the
breakup of the liquid into small drops. The transformation of bulk
liquid into sprays containing these small drops in a gaseous
atmosphere is of importance to a broad range of practical processes.
Sprays are encountered in many engineering, environmental,
medical and biomedical applications. Atomization, referring to the
conversion of bulk liquid into a collection of drops (i.e. a spray),
often occurs after the liquid passes through a nozzle. Numerous
devices to generate spray flows have been developed and they are
generally designated as atomizers or nozzles. Although atomization
does not usually imply that the liquid particles are reduced to
atomic sizes, the spray drops from atomization can be very small. In
many industrial applications such as aircraft engines, diesel and
gasoline internal combustion engines, and spray painting of automobiles, as well as in medical applications, atomization and spray
process is an integral part of a much larger practical flow system.
For example, a gas-turbine system for aircraft propulsion is a rotary
engine that extracts energy from a flow of combustion gas generated from a combustor, which has an upstream compressor and
a downstream turbine. Combustion provides power to the system
in the form of shaft power and thrust. A gas-turbine combustor is
a complex combustion device within which there are a broad range
of coupled, interacting physical and chemical phenomena, with
atomization and spray being one of the most important processes.
In the combustor, energy is added to the gas stream through
combustion between the air and the liquid fuel, which is atomized
first, forming a spray, before the gas-phase combustion occurs.
Spray characteristics are of great importance to gas-turbine
combustors. The liquid fuel, used as the energy source, must be
atomized into smaller droplets in order to increase the surface area
of fuel exposed to the hot gases and to facilitate rapid evaporation
diff
f
F
g
i
j
k
kin
l
m
mix
o
O
p
P
R
rel
s
S
sat
stir
surf
t
v
vol
133
diffusion
fluid
fuel
gas
incoming; index
index
index
kinetically controlled
liquid
index
mixing controlled
outgoing
oxidizer
particle
product
resolved subgrid scale
relative
spray; surface
unresolved subgrid scale
saturation
stirring
surface
turbulent
vapor
volume
and mixing with the oxidant ambience, where the mixing always
dominates the combustion process.
Atomization and spray process is a typical gasliquid two-phase
flow of great practical relevance in applications such as the fuel
injection in gas-turbine combustors of aircraft engines and in
internal combustion engines. The combustion performance and
emissions are mainly influenced by the atomization of the liquid
fuel, the motion and evaporation of the fuel droplets and mixing of
fuel with air. The dynamics of spray and its combustion characteristics are extremely important in determining, for instance, the
flame stability behaviour at widely varying loads, the safe and
efficient utilization of energy, as well as the mechanisms of
pollutants formation and destruction. Understanding and controlling atomization and spray combustion is becoming an essential
part of the industrial applications, which have been driven by
increasingly urgent demands to improve fuel and energy efficiencies, and to drastically reduce the emission of pollutants.
The spray combustion process may be divided into several
elements, such as atomization, liquid transport, vaporisation, and
combustion. In general, liquid fuel is injected through a nozzle system
into the combustor chamber and is atomized to form a spray of
droplets before gas-phase combustion takes place in the vaporized
fuel. Fig.1 shows a schematic of a simple liquid spray plume structure.
In the atomization region, the liquid dominates the flow and the
liquid fuel disintegrates into ligaments and droplets. Large liquid
blobs which are bulks of continuous liquids present in the atomization region. The dense spray region has lower but still significant
liquid volume fraction and includes secondary breakup of drops and
ligaments as well as dropdrop interactions, such as collisions and
coalescence. Liquid ligaments normally present in the atomization
and dense spray regions, which are non-spherical liquid sheets,
sheared off the liquid jet column. In the dilute spray region, spherical
droplets are well formed and have a strong interaction with the
turbulent airflow. In general, the spray structure depends on the
injection pressure difference, injector size, fuel viscosity and fuel
density. With the initial injection velocity, liquid-fuel droplets
134
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
penetrate into the ambient gaseous environment which is usually air
or more often mixture of air and hot combustion gas. The fuel spray
advances with time until droplets are vaporized by the hot
combustion gas.
There are different technical methods of achieving atomization.
Carburetors, airbrushes, and spray bottles are only a few examples
of atomizers used ubiquitously. Essentially, all that is needed is
a force such as a high pressure or a large shear force from the high
relative velocity between the liquid to be atomized and the
surrounding air or gas to overcome the surface tension of the liquid.
Most practical atomizers are of the pressure, rotary or twin-fluid
type. In a pressure type of atomizer used frequently in fuel injection
in combustion engines, the pressure force overcomes the liquid
surface tension. In a rotary or twin-fluid type atomizer (all nozzle
types in which atomization is achieved using high-velocity air, gas
or steam), the shear force or the centrifugal force overcomes the
liquid surface tension. Many other forms of atomizers have also
been developed that are useful in special applications, including
electrostatic atomizer where electrical force is used to overcome
surface tension forces and achieve atomization, impinging jet
atomizer where liquid jets collide outside the nozzle to achieve
atomization, ultrasonic atomizer in which high frequency
(2050 kHz) vibration is utilized to produce narrow drop size
distribution and low velocity spray from a liquid, whistle atomizer
in which sound waves are used to shatter a liquid jet into droplets,
and windmill atomizer which is a rotary atomizer used for aerial
application of pesticides with a unique feature of using wind forces
to provide rotary motion.
Most commonly used atomizers for spray combustion applications include mainly plain-orifice atomizers for fuel injection in
combustion engines and gas-turbine combustors, pressure-swirl
and air-blast atomizers and effervescent flow atomizers for
combustors, engines and propulsion applications. The plain orifice
is the most common type of atomizer and the most simply made.
However, there is nothing simple about the physics of the internal
nozzle flow and the external atomization. In the plain-orifice
atomizer, the liquid is accelerated through a nozzle due to high
injection pressure, forms a liquid jet, and then forms droplets. This
apparently simple process is impressively complex in physics. The
plain orifice may operate in single-phase or cavitating flow regime.
The transition between regimes is abrupt, producing dramatically
different sprays. The internal regime determines the velocity at the
orifice exit, as well as the initial droplet size and the angle of droplet
dispersion. Combustion applications for plain-orifice atomizers
include diesel engines, turbojet afterburners, ramjets, and rocket
engines. Another important type of atomizer is the pressure-swirl
atomizer, sometimes referred to by the gas-turbine community as
a simplex atomizer. This type of atomizer accelerates the liquid
through nozzles known as swirl ports into a central swirl chamber.
The swirling liquid pushes against the walls of the swirl chamber
and develops a hollow air core. It then emerges from the orifice as
a thinning sheet, which is unstable, breaking up into ligaments and
droplets. The pressure-swirl atomizer is very widely used for
liquid-fuel combustion in gas turbines, oil furnaces, and directinjection spark-ignited automobile engines as well. In order to
accelerate the breakup of liquid sheets from an atomizer, an additional air stream is often directed through the atomizer. The liquid
is formed into a sheet by a nozzle, and the air is then directed
against the sheet to promote atomization. This technique is called
air-assisted atomization or air-blast atomization, depending on the
quantity of air and its velocity. The addition of the external air
stream past the sheet produces smaller droplets than without the
air. The exact mechanism for this enhanced performance is not
completely understood. It is thought that the assisting air may
enhance the sheet instability. The air may also help disperse the
droplets, preventing collisions between them. Air-assisted atomization is used in many of the same fields as pressure-swirl atomization, where fine atomization is especially required. The merits of
the air-blast atomizer have led to its installation in a wide variety of
aircraft, marine, and industrial gas turbines. Similar to the pressureswirl atomizer, there is also a type of atomizer referred to as the
flat-fan atomizer which makes a flat sheet and does not use swirl. In
addition to the commonly used atomizers, effervescent atomization
is the injection of liquid infused with a super-heated (with respect
to downstream conditions) liquid or propellant. As the volatile
liquid exits the nozzle, it rapidly changes phase. This phase change
quickly breaks up the stream into small droplets with a wide
dispersion angle. It also applies to cases where a very hot liquid is
discharged. Effervescent atomization involves bubbling a small
amount of gas into the liquid and the physics of effervescence
atomization has not been fully understood.
As a means to achieve improved combustion efficiency and
reduced pollutant emissions, atomization and spray combustion
remain a very important process in the current and future energy
systems. There has been a substantial amount of experimental,
computational and theoretical studies on fuel injection and spray
combustion, which have been reviewed from different perspectives
in the past, e.g. [127], mainly from theoretical and experimental
points of view. Over the last few decades, the continuous evolution
in the research area of atomization and sprays has been predominantly driven by the readily available laser optical instruments and
enormously enhanced computer powers. To achieve the ever
stringent goals of low emission and to further improve the fuel
economy, a much greater degree of control of atomization and
spray processes is required in the atomizer design and the spray
systems. An in-depth understanding is essential to the effective
control of atomization and spray processes. However, such an
understanding is still not available due to the complex nature of the
multiphase reacting flows. There are also new spray systems
emerging in different applications. For instance, electrosprays and
ultrasonic sprays provide the means to generate more steady and
controlled spray flows [24], but these processes have been poorly
understood.
The rapid and steady improvements in the speed of computers
and the available memory size since the 1950s have led to the
emergence of computational fluid dynamics (CFD) in the 1960s and
the development of advanced CFD approaches such as direct
numerical simulation (DNS) and large-eddy simulation (LES) in
a later stage. Numerical simulation based on modern CFD represents a useful tool to obtain flow characteristics that can be effectively utilized to understand the flow physics, to interpret available
experimental data and to guide experimental work, as well as to
execute pre-calculations for altered operating conditions.
The basis of CFD is that the physical aspects of any fluid flow are
governed by three fundamental principles: mass is conserved;
Fig. 1. A schematic of a liquid spray.
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
Newton’s second law and energy is conserved. These fundamental
principles are expressed in terms of mathematical equations, which
in their general form can be given as partial differential equations,
namely the NavierStokes equations for fluid flow. For combustion
applications, chemical reactions and the associated heat releases
lead to significant complexities in the fluid flow such as changes in
concentrations of chemical species and in fluid transport properties
(diffusivity, thermal conductivity, fluid viscosity, etc.). Consequently, additional governing equations to account for these
changes need to be included for CFD of chemically reacting flows.
As a computational tool, CFD is the science of determining
a numerical solution to the governing equations of fluid flow whilst
advancing or iterating to obtain the solution through space and/or
time to acquire a numerical description of the complete flow field
of interest. CFD deals with numerical methods and algorithms to
solve and analyze problems that involve fluid flows. CFD codes are
structured around the numerical algorithms that can tackle fluid
flow problems while computers are used to perform the significant
amount of calculations needed. As it stands, CFD complements
experimental and theoretical fluid dynamics by providing an
alternative cost effective means of simulating real flows including
gasliquid multiphase flows in the atomization and sprays
processes. As such high fidelity CFD also offers a means of testing
theoretical advances for conditions unavailable or extremely difficult to obtain based on an experimental basis, such as the physical
models for atomization and sprays. The role of CFD in engineering
applications has become so strong that it is now viewed as a new
third dimension of fluid dynamics, the other two dimensions being
the experimental and theoretical approaches, as stated by Anderson [28]. From the 1970s and onwards CFD techniques have been
integrated into the design, research and development of aircraft
and jet engines, internal combustion engines and furnaces. CFD is
playing an increasingly important role as a design tool in industry.
Simultaneously, the newly emerging and the recent development
of advanced CFD such as LES and DNS open new opportunities to
simulate fluid flows with much higher fidelity and to explore the
physical insights of many complex fluid flow systems.
As an emerged science over the last half-century, CFD has
developed significantly mainly due to the enormous advancements
in computer technology. In the traditional Reynolds-averaged
NavierStokes (RANS) modelling framework of CFD, the time- or
ensemble-averaged equations for fluid mechanics are solved. Due
to the intrinsic time- or ensemble-averaging, RANS approach does
not provide enough information on the dynamic or unsteady
features of the flow such as the vortical structures in the flow field.
For fuel injection and spray combustion processes, unsteadiness is
a dominate feature of the fluid dynamics, which can be often poorly
predicted by RANS. However, advanced simulation and modelling
techniques like DNS and LES can provide insight into such complex
unsteady dynamics of the flow. The recent developments in DNS
and LES offer an opportunity to investigate transient processes by
providing temporally and spatially resolved (as in DNS) or better
modelled (as in LES) solutions. Despite the significant amount of
reviews available for atomization and sprays from different aspects,
e.g. [127], there is a lack of review of the current applications of
CFD to atomization and spray combustion, especially the applications of advanced CFD such as DNS and LES.
Atomization and spray process remains a significant challenge
to CFD practitioners. In most of the atomization and spray
processes, the breakup of liquid jets and sheets results in chaotic
generation of drop sizes and velocities. In current spray systems,
the variation in drop size and speed can be vastly different. In the
medical sprays, aerosol particles in the range of a few microns have
been used [24]. For various industrial sprays, the drop size covers
a broad range, from 10 mm typically for aerosols and diesel sprays to
135
1000 mm for sprinklers. The velocity of sprays can range from a few
centimeters to several hundred meters per second, involving both
incompressible and compressible flows and covering both laminar
and turbulent flow regimes. The physics of gasliquid two-phase
flows in atomization and spray processes have not been well
understood due to the multiple time and length scales involved and
the coupling between the two phases, which is always difficult to
investigate using simple experimental and/or computational
approaches.
There are two different ways in which the two-phase spray
flows are commonly represented in CFD. These two approaches are:
the ‘‘Eulerian’’ method, where the spray is considered as
a continuum across the whole flow domain, and the ‘‘Lagrangian’’
method, where the paths taken by droplets or clusters of droplets
are tracked through the domain. In the Lagrangian particle tracking
approach, the gas phase is still represented using the Eulerian
approach but the liquid spray is represented by a number of
discrete computational ‘‘particles’’. Individual particles are tracked
through the flow domain from their injection point until
they escape the domain or until some integration limit criterion is
met. Each fluid particle typically represents a large number of
droplets with a given size distribution and transport properties. The
larger number of particles or trajectories gives a reasonable
representation of the liquid behaviour. One of the advantages of
the Lagrangian approach is that an accurate representation of the
droplet distribution can be obtained at a lower cost than the
Eulerian approach of the liquid phase, where tracking the interface
between all the droplets and the gas phase can be a prohibitive task
in terms of computing costs. Consequently, the Lagrangian method
for the liquid phase has been predominantly used in RANS and LES.
Lagrangian approach is a reduced modelling strategy where the
internal dynamics of the droplets or liquid parcels is ignored. Due to
this reason and the prohibitively large number of droplets that
need to be traced and the extensive models involved for the
descriptions of the liquid phase especially for the initial breakup
and atomization stage, it is not normally preferable in DNS.
In the following sections of this review, the physical modelling
of atomization and sprays is discussed first in Section 2, in the
context of RANS modelling approach of spray flows. Since RANS
modelling approach will remain to be the dominant method in
industrial applications in the foreseeable future, physical submodels of atomization and spray processes are an important part of
CFD applications to spray flows. In Section 3, the more advanced
LES of spray flow and combustion is briefly reviewed, where the
SGS modelling issues are highlighted. In Section 4, DNS-like
simulations of gasliquid two-phase flows for atomization and
sprays are described, including relevant numerical methods.
Finally, in Section 5, other relevant issues of modelling and simulation of atomization and sprays are discussed, including modelling
of internal flow and hollow-cone sprays, dense sprays, electrohydrodynamic (EHD) atomization, and multiscale modelling of
atomization and sprays. The review has been focussed on the fluid
dynamic aspects of spray flows, rather than the detailed combustion modelling of the reacting aspects of the flows.
2. Physical modelling of atomization and sprays
The development of computers with large memory and highspeed processors enables theoreticians to formulate and numerically solve comprehensive mathematical models with detailed
consideration of physical and chemical processes involved in
liquid-fuel atomization and spray combustion. Due to the
complexity involved in atomization and spray processes such as the
broad range of time and length scales involved, modelling or
approximation is inevitable in CFD of such multiphase flow
136
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
phenomena. In many practical applications of atomization and
sprays such as those in combustion engines and gas-turbine
combustors, the phenomena are remarkably complex and challenging, which often occur in a three-dimensional, time-dependent
system with partly understood multiphase turbulent flow and
chemical reactions. Consequently, CFD analysis of atomization and
sprays is more difficult than CFD analysis in many other areas. A key
component for successful CFD of internal combustion and gasturbine combustion is accurate characterization of the liquid
sprays. CFD of spray flows involving both gas and liquid phases is an
area with enormous efforts, where the gas phase can always be
represented (not modelled) by the NavierStokes equations in the
Eulerian reference frame but the tracking of the liquid phase can be
different. The liquid phase including the ligaments and droplets can
be tracked either in an Eulerian reference frame similar to the gas
phase, or in the Lagrangian reference frame by tracing the trajectories of the liquid particles. The Lagrangian reference frame is
a way of looking at fluid motion where the observer follows
individual fluid particles as they move through space and time,
while the Eulerian reference frame is a way of looking at fluid
motion that focuses on specific locations in space through which
the fluid flows.
For the atomization and spray processes, there have been
physical models developed for the fuel injection and atomization
processes in combustion engines, also for atomization processes
in atomizers in gas-turbine combustors such as pressure-swirl
atomizers, air-blast atomizers, plain orifice, and effervescent
atomizer. Although the practical fuel injectors and atomizers in
different applications can be very different, the underlying physics
for atomization is similar in these applications. As an example, the
following discussion on physical modelling of atomization and
sprays is directed towards combustion engine applications, but the
modelling issues and approaches for gas-turbine combustors are
very similar. In the following subsections, the spray equation in the
Lagrangian approach, atomizers and liquid atomization modelling,
droplet kinematics, droplet/droplet and droplet/wall interactions,
and liquid (fuel) evaporation are discussed in the context of traditional CFD of engine flow and combustion.
2.1. The spray equation in the Lagrangian approach
The application of CFD to spray combustion allows the fundamentals of single-droplet behaviour to be combined with fluid
mechanics to predict fuel preparation effects in practical spray
combustors. Many of the CFD codes available have incorporated
spray modelling, which has been largely based on the Lagrangian
approach to the liquid phase, e.g. [29,30]. For spray flows described
in the Lagrangian approach, the basic conservation equations of
mass, momentum, and energy for the fluid must be modified to
include additional terms, which account for two-phase effects. The
continuity equation for gas-phase species includes a source term
due to vaporization of droplets. The momentum equation includes
a term for the rate of momentum gain per unit volume due to the
spray. The energy conservation equation includes a source term for
the energy exchange involved in droplet vaporization. In practical
CFD codes, the current status of turbulence modelling uses
ensemble-averaged equations in which turbulence transport
properties are computed from a turbulence model such as the k 3
model. For sprays, the turbulent kinetic energy k and dissipation
rate 3 equations each contain an additional term due to spray
interactions.
The spray itself could in theory be modelled by following the
behaviour of each droplet, but the complexity of this approach for
practical computations is prohibitive given current computer
capabilities. Thus, the spray is often described in terms of a droplet
distribution function f , which is a function of eleven independent
variables: three droplet position components x, three droplet
velocity components v, droplet radius r, droplet temperature
(assumed uniform within the droplet) Td , droplet distortion from
sphericity y, the time rate of change of the droplet distortion
_ and time t. From f one can compute the probable
parameter y,
number of droplets per unit volume at a given position and time
that lie within a given incremental interval around each of the other
seven independent variables. The time evolution of f is computed
from the so-called ‘‘spray equation’’, which accounts for changes in
f due to each of the eleven independent variables plus changes due
to droplet collisions and breakup. The spray model considers the
droplet interactions with turbulence and walls, and calculates the
changes of the independent variables (size, velocity, temperature,
etc.) due to momentum change, evaporation, etc. A complete
Lagrangian description of particles also needs to account for the
orientation and rate of rotation of non-spherical particles. Solution
of the spray equation for f then allows calculation of the source
terms in the gas-phase equations, to account for change of mass,
momentum and energy in the gas phase due to sprays, and the
spray terms in the turbulence model equations.
The spray equation states conservation of probability in the state
space of the random variables [31], which can be written as [32]:
vf
v
v _ v v €
f Td þ
þ Vx ,ðf vÞ þ Vv ,ðf FÞ þ ðf RÞ þ
f y_ þ
fy
vt
vr
vTd
vy
vy_
þ f_
ð1Þ
¼ f_
coll
bu
_ tÞdv dr dTd dy dy_ is the probable number
In Eq. (1), f ðx; v; r; Td ; y; y;
of droplets per unit volume at position x and time t with velocities
in the interval ðv; v þ dvÞ, radii in the interval ðr; r þ drÞ, temperature in the interval ðTd ; Td þ dTd Þ, and displacement parameters in
_ y_ þ dyÞ.
_ In the spray equation,
the intervals ðy; y þ dyÞ and ðy;
F ¼ dv=dt denotes the acceleration of an individual droplet, R, T_ d ,
€ are the time rates of changes of droplet radius, temperature,
and y
and oscillation velocity y_ respectively. The terms f_ coll and f_ bu are the
sources due to droplet collisions and breakup. By solving the spray
equation, the so-called source or exchange terms can be obtained,
which describe the interactions between the liquid and gas phases.
In order to assure conservation of mass, momentum and energy of
the total (two phase) system, these terms need to be included in the
gas-phase conservation equations. Following Reitz [32], the source
terms in the gas-phase mass conservation equation r_ s , momentum
s
s
equation F_ , energy equation Q_ , and turbulent kinetic energy
s
_ can be given as:
equation W
r_ s ¼
s
F_ ¼
Z
f rd 4pr 2 R dv dr dTd dy dy_
Z
s
Q_ ¼
Z
f rd
4 3 0
pr F þ 4pr2 Rv dv dr dTd dy dy_
3
Z
(3)
1
4
f rd 4pr 2 R Il þ ðv uÞ2 þ pr 3 cl T_ d
2
3
þ F0 $ðv u u0 Þ
_ s ¼
W
(2)
dv dr dTd dy dy_
4
f rd pr 3 F0 $u0 dv dr dTd dy dy_
3
(4)
(5)
In above equations, the superscript s indicates that the source terms
are due to spray effects and the subscript d represents droplets,
F0 ¼ F g is the difference between the droplet and the gravitational accelerations, v u is the droplet-gas relative velocity, u0 is
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
the turbulent fluctuation of the gas velocity, Il and cl are the internal
energy and specific heat of liquid droplets, respectively.
In CFD codes, the spray equation is normally solved using
a Monte-Carlo based solution technique in the Lagrangian formulation [29], based on the so-called discrete droplet model proposed
by Dukowicz [33]. The trajectories of spray droplets are traced in
the eleven dimensional phase space once they are injected. The
method describes the spray droplets by stochastic particles that are
usually referred to as parcels [34]. The spray models consider the
droplet interactions with turbulence and walls, and calculate
droplet momentum changes due to drag, droplet breakup, collision
and evaporation. These processes control the droplet locations,
sizes, velocities, temperatures and distortions. The status of droplets, i.e. the function f , is updated by the solution of Eq. (1) and the
contribution of fuel spray to the gas phase is then obtained since
mass, momentum and energy are transferred between the phases.
Additional consideration is needed in the spray equation to
describe the injection, atomization, distortion, breakup, collision
and coalescence of spray droplets. An efficient injection modelling
approach is to introduce the liquid into the combustion chamber as
computational parcels containing large numbers of identical
droplets. The number and velocity of the injected droplet parcels
can be determined from the fuel flow rate and knowledge of the
nozzle discharge coefficient [35].
For spray simulations in the traditional RANS CFD modelling
approach, it should be understood that due to the probabilistic
approach of the spray equation and the finite grid size of the
calculations, many limitations are present. In a practical simulation,
many droplets are contained within a given grid volume element
due to the finite grid size (currently of the order of 12 mm). The
modelling assumptions, which determine behaviour within each
grid element, are thus very important. The limitations on grid size
also affect the modelling of heat transfer, momentum exchange,
and droplet phenomena at solid surfaces, etc., therefore numerical
resolution is important in reproducing the structure of sprays [36].
The closure of the spray equation requires expressions to
approximate relevant terms in Eq. (1), which necessitates modelling
approximations for the sub-processes of atomization and sprays. A
variety of sub-models on atomization and sprays are involved in
numerical simulation of sprays. These sub-models are based on
many theoretical assumptions and empirical correlations. In
a numerical simulation, the assumptions inevitably affect the results
and which of the many empirically based assumptions is most
important depends strongly on the application. In the following
subsections, physical modelling of atomization and sprays is discussed in terms of liquid atomization, droplet kinematics, droplet/
droplet and spray/wall interactions, and fuel evaporation.
2.2. Liquid atomization modelling
Atomization is the process leading to the formation of sprays,
which refers to the conversion of bulk liquid into a collection of
droplets, often by passing the liquid through a nozzle or an atomizer. Atomization can be considered as a disruption of the consolidating influence of surface tension by the action of internal and
external forces. The atomization model supplies the initial conditions for spray computations, i.e. the drop sizes, velocities,
temperatures, etc., at the injector nozzle exit. In spite of the
importance of atomization and the extensive efforts devoted to its
study, the fundamental mechanisms of breakup and atomization
are still not well understood. Modelling liquid atomization represents a particularly difficult challenge since there is still much
uncertainty about the fundamental mechanisms of atomization.
Models have been proposed which ascribe atomization to the
turbulent and/or cavitation flow processes within the nozzle
137
passage, and to aerodynamic effects outside the nozzle, and to
other mechanisms [37]. In CFD computations of spray flows, an
approximate method has to be used to represent the complex
physics of atomization, where the initial atomization of the injected
blobs, as well as the subsequent breakup of the droplets produced
from the atomization process can be modelled using droplet
breakup models. This procedure removes the requirement of
having to specify droplet sizes at the nozzle exit, and it is based on
the reasonable assumption that the atomization of the injected
liquid and the fragmentation of droplets or liquid ‘‘blobs’’ are
indistinguishable processes within the dense liquid core region
near the injector nozzle exit. Two droplet breakup models have
been widely used: the Taylor analogy breakup (TAB) model [38] and
the ‘‘wave’’ breakup model [39].
The TAB model [38] compares an oscillating-distorting droplet
to a spring-mass system where the aerodynamic force on the
droplet, the liquid surface tension force, and the liquid viscosity
force are analogous, respectively, to the external force acting on
a mass, the restoring force of a spring, and the damping force. The
distortion parameter y is calculated by solving a spring-mass
equation of the form
€ ¼
y
2 rg w2
8s
5m
3 y 2l y_
3 rl r 2
rl r
rl r
(6)
where rg is the gas density; rl , s, and m are the liquid density,
surface tension, and viscosity, respectively; and w ¼ v u is the
local relative velocity between the droplet and the surrounding gas.
If the value of y exceeds unity, the droplet breaks up into smaller
droplets with radius specified in given distributions [38].
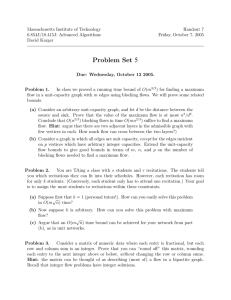
The ‘‘wave’’ breakup model for atomization was developed by
Reitz [39], who applied the ‘‘wave’’ stability theory to diesel fuel
atomization. By injecting parcels of liquid in the form of ‘‘blobs’’
that have a characteristic size equal to the nozzle hole diameter, the
basis of this model is the concept that the atomization of the
injected liquid and the subsequent breakup of drops are indistinguishable processes within a dense spray. As depicted in Fig. 2,
a core region is assumed to exist near the nozzle as ‘‘blobs’’ and the
injected liquid breaks up due to its interaction with the
surrounding gas as it penetrates into the gas. There is a region of
large discrete liquid particles near the nozzle, which is conceptually
equivalent to a core of churning liquid ligaments. Considering
a liquid jet issuing from an orifice into a stationary, incompressible
gas, the stability of the liquid surface to linear perturbations is
examined by the ‘‘wave’’ breakup theory, which ultimately leads to
a dispersion equation. The relationship includes the physical and
dynamical parameters of the liquid jet and the surrounding gas.
The ‘‘wave’’ breakup model [39] considers the unstable growth
of KelvinHelmholtz waves at a liquidgas interface due to the socalled KelvinHelmholtz instabilities, which occur when there is
a shear motion of two fluids flowing alongside each other. A
stability analysis leads to a dispersion equation relating the growth
rate, U, of an initial perturbation on a liquid surface of infinitesimal
amplitude to its wavelength, L, and to other physical and dynamic
parameters of both the liquid and the ambient gas. Curve fits of the
numerical solutions for the maximum growth rate and its wavelength are
U
L
a
rl a3
s
0:5
¼ 9:02
¼
0:34 þ 0:38We1:5
g
ð1 þ ZÞ 1 þ 1:4T 0:6
1 þ 0:45Z 0:5
;
1 þ 0:4T 0:7
1 þ 0:87We1:67
g
0:6
(7)
138
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
Fig. 2. Schematic of ‘‘blobs’’ from a liquid jet formed during fuel injection.
where a represents the parent droplet or blob radius, Weber
numbers for the gas and liquid phases are Weg ¼ rg U 2 a=s and
Wel ¼ rl U 2 a=s respectively, U is the gas velocity at the liquid
=Rel with
surface, Ohnesorge number of the liquid is Z ¼ We0:5
l
Reynolds number Rel ¼ rl Ua=ml, T ¼ ZWe0:5
g is the Taylor parameter. The liquid breakup is modelled by postulating that new
droplets are formed (with droplet radius r) from a parent droplet or
blob (with radius a) with
r ¼ B0 L where ðB0 L aÞ; or
h
1=3
; 3a2 L=4
r ¼ min 3pa2 U=2U
1=3 i
where ðB0 L > a; one time onlyÞ
ð8Þ
where B0 ¼ 0:61. In Eq. (8), it is assumed that small droplets are
formed with droplet sizes proportional to the wavelength of the
fastest-growing or most probable unstable surface wave; it is also
assumed that the jet disturbance has frequency U=2p (a droplet is
formed each period) or that the droplet size is determined from the
volume of liquid contained under one surface wave for droplets
larger than the jet (low-speed breakup). The mass of new droplets
due to breakup is subtracted from the parent droplets. The change
of the radius of a parent droplet is assumed to follow the rate
equation
da
ar
with ðr aÞ;
¼ s
dt
a
¼ 3:726B1
wheres is the breakup time s
has been combined with the so-called RayleighTaylor (RT)
breakup model based on the recognition of RayleighTaylor
instabilities that occur when a low density fluid is supporting
a higher density fluid against a force, in order to estimate the
disintegration of the blobs into secondary droplets. RT-instabilities
can develop if the fluid acceleration has an opposite direction to the
density gradient. For a liquid blob decelerated by drag forces in
a gas phase, this means that instabilities may grow unstable at the
trailing edge of the droplet. When the RT- and KH-models are used
together, they are implemented in a competing manner, i.e. the
droplet breaks up by the mechanism that predicts a shorter
breakup time. Close to the injector nozzle where the droplet
velocities are highest, the KH-breakup is usually the governing
mechanism, whereas the RT-breakup becomes more dominant or
both mechanisms are important further downstream.
2.3. Droplet kinematics, droplet/droplet and spray/wall
interactions, and liquid-fuel evaporation
Droplet kinematics is an integral part of spray dynamics. In the
Lagrangian formulation of the discrete droplet model, the position
of a droplet or actually the position of a parcel containing a group of
identical droplets is characterized by the vector x. The momentum
of the droplet during one computational time step dt is derived
from
d
x ¼ v
dt
LU
(9)
In Eq. (9), B1 is the breakup time constant that depends on the
injector characteristics.
Fig. 3 shows a schematic diagram of the surface waves and
breakup of a ‘‘blob’’ in the ‘‘wave’’ breakup model. The ‘‘wave’’
breakup model considers the growth of initial perturbations of the
liquid surface and includes the effects of liquid inertia, surface
tension, viscous and aerodynamic forces on liquid jets and sheets.
The theory is found to offer a reasonably complete description of
the breakup mechanisms of low-speed liquid jets. For high-speed
jets and sheets, however, the initial state of the jet at the nozzle exit
appears to be more important and less understood and the linear
stability analysis involved in the ‘‘wave’’ model may not be
sufficient.
The TAB model and the ‘‘wave’’ breakup model discussed are
widely used to describe both the primary breakup of the intact
liquid phase into first ligaments and droplets and the secondary
breakup of liquid-fuel droplets into even smaller droplets. The first
attempt to include secondary droplet breakup in a CFD spray
calculation was made by Reitz and Diwakar [40]. In many recent
applications, the ‘‘wave’’ or KelvinHelmholtz (KH) breakup model
(10)
where the change in the droplet velocity vector is determined from
d
v ¼ F
dt
(11)
Fig. 3. Schematic diagram showing surface waves and breakup of a ‘‘blob’’.
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
The acceleration term, F, in the above equation, is obtained from
the equation of motion of a droplet moving at a relative velocity,
v u, in the gas, i.e.
rl VF ¼
1
r C A $ju vj$ðu vÞ
2 g D f
(12)
where V and Af are the droplet volume and frontal area, respectively. To calculate the droplet drag, the droplet can be taken to be
a sphere with drag coefficient [29] given by
CD ¼
2=3 1 þ 16Red
0:424
24
Red
Red 1000
Red > 1000
(13)
where Red ¼ 2r rg $ju vj=mg is the droplet Reynolds number.
However, the droplets undergo high distortion in many applications such as in diesel sprays due to the high injection velocity
and the drag coefficient changes as a droplet departs from the
spherical shape. To account for this, the distortion of a droplet can
be calculated from the TAB model, i.e. Eq. (6). The distortion
parameter lies between the limits of a sphere y ¼ 0 and a flattened
droplet or disk y ¼ 1 that has a drag coefficient CD ¼ 1:54. A
simple expression for drag coefficient has been formulated to
recover those limits for high-speed droplets [29], given as follows
CD ¼ CD;sphere ð1 þ 2:632yÞ
(14)
Droplet/droplet and spray/wall interactions also need to be
described in spray modelling based on the Lagrangian approach.
Drop collisions occur in almost all spray applications and these
collisions are particularly important in dense sprays. The collisions
have a strong influence on the mean droplet size and its spatial
distribution and can therefore affect other sub-processes of spray
combustion. While fairly detailed theories have been proposed to
describe the various collision mechanisms, e.g. [4143], up to now
their application in numerical simulation of sprays has been mostly
limited to fundamental studies. In most engine spray simulations,
the collision model by O’Rourke and Bracco [44] has been used.
In the O’Rourke and Bracco model [44], two spray regimes of
coalescence and stretching separation are distinguished. The
droplet/droplet collision process is modelled by computing the
collision frequency n12 between droplets in parcel 1 (containing
larger droplets) and parcel 2 in each computational cell,
n12 ¼ N2 pðr1 þ r2 Þ2 jv1 v2 j=Vol
b2 ¼ qðr1 þ r2 Þ2
and b2crit
g3 2:4g2 þ 2:7g
¼ ðr1 þ r2 Þ2 min 1:0; 2:4
Wel
compact combustion chambers and high-pressure injection
systems, spray wall impingement is an inherent sub-process of
mixture formation. The impact of a droplet on a heated surface may
lead to its instantaneous breakup, sudden vaporization, or to the
development of a thin liquid film on the surface [45]. The liquid
droplet can stick, bounce, spread, breakup, or splash during the
spray/wall interaction [46]. It has been shown that the droplet
Weber number is an important parameter in spray impingement.
For We 80 the droplet rebounds from the wall while for We > 80
the droplet may disintegrate into small droplets that move away
from the impingement site parallel to the surface, depending on the
surface conditions and temperature. In the model of Naber and Reitz
[47], at high Weber numbers (We > 80) the impinging droplet is
assumed to slide along the wall surface. This model has also been
extended to include the rebounding droplet case for We < 80. In this
case, the tangential velocity component of the rebounding droplet is
assumed not to change during the collision and the normal velocity
component is evaluated using a correlation between the arrival and
departure Weber numbers in the form of [48]
Weo ¼ 0:678Wei e0:04415Wei
(16)
In Eq. (16), q is a random number in the interval of (0, 1) and
g ¼ r1 =r2 . If b exceeds bcrit , coalescence does not occur and the
droplets maintain their sizes and temperatures but undergo
velocity changes. If coalescence is predicted, n droplets are
removed from parcel 2 and the size, velocity, and temperature of
droplets in parcel 1 are modified appropriately.
Spray/wall interaction is also an important sub-process in spray
combustion. Especially in modern passenger car diesel engines with
(17)
where the subscripts i and o refer to the incoming and outgoing
rebounding droplets, respectively. The subsequent disintegration
or breakup of the droplet depends on the relative velocity between
the droplet and the gas. Spray wall impingement represents
a sudden disturbance acting on a droplet. In modelling the breakup
of droplets near the wall due to impingement, the droplet breakup
time constant in Eq. (9) has been assigned a different value [48]. In
the modelling of spray/wall interaction [49,50], the effects of liquid
films and wall heat transfer have also been considered.
The droplet breakup and collisions associated with droplet/
droplet and spray/wall interactions affect the droplet kinematics.
They can lead to the change in the number of droplets in a specific
size class and even to the appearance or disappearance of droplet
classes from the computation. In the spray equation, their effects
are embodied in the two source terms f_ coll and f_ bu , given in the
right-hand side of Eq. (1).
Liquid-fuel evaporation also needs to be included in spray
modelling. In the spray equation, one term that must be modelled is
the rate of droplet radius change, R, due to vaporization. The
Frossling correlation [48] may be used:
(15)
where N2 is the number of droplets in parcel 2, v is the droplet
velocity vector and Vol is the volume of the cell. The probable
number of collisions, n, within the computational time step Dt is
then equal to n12 Dt. The probability of no collisions is pðnÞ ¼ en12 Dt
so that 0 < pðnÞ < 1. A collision event is assumed if pðnÞ is less than
a random number generated in the interval (0, 1). Coalescence of
colliding droplets results if the collision impact parameter b is less
than a critical value bcrit , where
139
R ¼
rg DB Sh
dr
¼ 2rl r
dt
(18)
where D is the (laminar) mass diffusivity of fuel vapor in air, B is the
mass transfer number, and Sh is the Sherwood number. The fuel
mass fraction at the droplet surface (which appears in B) is obtained
by assuming that the partial pressure of fuel vapor equals to the
equilibrium vapor pressure at droplet temperature.
The liquid-fuel evaporation also affects the droplet temperature.
For the spray equation, the rate of change in droplet temperature is
calculated from an energy balance involving the latent heat of
vaporization and the heat conduction from the gas. The rate of heat
conduction from the gas to the droplet is
Q ¼
aðT Td ÞNu
2r
(19)
where a is the (laminar) thermal diffusivity, T and Td are the gas
and droplet temperatures, respectively, and Nu is the Nusselt
number.
Another important issue in fuel evaporation is the modelling of
multi-component fuels [37]. For alternative fuels, the spray properties can be very different [51]. In many practical applications, the
140
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
evaporation of the liquid multi-component droplets has to be
calculated in order to reasonably determine the source terms
originating from the spray. In the recent past, it has become more
and more popular to model more realistic fuels by means of
continuous thermodynamics [52,53]. However, the use of the
continuous thermodynamics is only possible if the important fuel
properties such as boiling and critical temperatures, density,
surface tension, viscosity, etc., can be explicitly expressed in terms
of the molecular weight. This condition is typically satisfied for
a particular family of hydrocarbons, e.g. for n-alkenes, but not for
components belonging to different categories. Much work still
needs to be done in this area.
the-art CFD of fuel injection and spray combustion, the multiphase
modelling in LES directly follows the same approach as that used in
RANS CFD described in the previous section, where the SGS models
only account for the subgrid scales in the reacting gas phase. In the
following subsections, focus has been given to the fundamentals of
LES such as the scale separation theory and space filtering, SGS
model for combustion, and some numerical issues for LES of
atomization and sprays.
3. LES of spray flow and combustion
The background of LES can be traced back to the energy cascade
concept originally introduced by Richardson [54]. To give a brief
explanation of this, Richardson [54] assumed that the turbulent
flow comprises of multiple eddy sizes (akin to turbulent scales)
which go smaller in size from the so-called integral length scales
(known also as the energy containing structures) to the Kolmogorov scales. Across this spectra, an energy transfer known as
energy cascade is occurring. At small scales, viscosity effects begin
to have influence and the energy of the smallest eddies is dissipated
exclusively by the viscosity forces.
Turbulent spray combustion is an extremely complex
phenomenon, involving multiple time and length scales. The
largest ones are of the order of the size of the system (for instance
dimensions of the gas-turbine combustion chamber), while
smallest, dissipative Kolmogorov scales are much smaller [55].
Combustion and multiphase phenomena add to the diversity and
complexity of the system. While reaction always occurs at the
molecular level and at the smallest timescales, there are many
situations where large-scale flow influences the structure of the
flame. Each of the species involved has its own characteristic length
scale, diffusivity, etc. Moreover, combustion in the system can be
mixing or reaction rate controlled, depending on many factors such
as turbulence levels, chemical species involved, pressure and
temperature, etc. This diversity of a turbulent reacting flow makes
it a very complex modelling task. If this type of physical problem is
attempted to be solved by numerical methods, limitations in both
mathematical description and the available computer resources
immediately arise. Therefore necessity exists to introduce
assumptions and simplifications to describe the system in an
abridged, reliable way, making the problem feasible for numerical
treatment.
Scale range separation is the basis of LES. Fig. 4 depicts the
Kolmogorov theory and associated turbulent flow scales. Those can
be divided into two main ranges: energy containing range and
universal equilibrium range. The energy containing range contains
the largest eddies which LES should be able to directly capture.
Universal equilibrium range is split into two subranges: inertial
range and dissipation range. The dissipation range contains the
smallest scales of turbulence (associated with Kolmogorov length
scale). Viscosity effects play a key role in dissipation of the flow
CFD models have become significantly important in gaining an
insight into reacting flow processes for improved combustion
performance and reduced emissions while not compromising fuel
economy. LES technique is a relatively new approach to deal with
simulations of turbulent flows emerged in the 1960s, with significant advancements in the last two decades due to the major
advances in computing power. LES is beginning to emerge as
a viable RANS alternative for industrial flows. In the traditional
RANS approach, focus was given to the turbulent mean flow, in
which the Reynolds-averaged (time-averaged) or ensemble-averaged governing equations were solved. Accordingly, unsteady flow
dynamics may not be fully captured. LES may overcome this
problem by using spatial filtering instead of time- or ensembleaveraging. In LES, explicit account is taken of flow structures larger
than the filter width, while the influence of unresolved scales is
modelled using a subgrid-scale model. The justification for LES is
that the larger eddies contain most of the energy, do most of the
transporting of conserved properties, and vary most from flow to
flow; the smaller eddies are believed to be more universal and less
important and should be easier to model. It is hoped that universality is more readily achieved at this level than in RANS modelling
but this assertion remains to be proven. In LES, there is a distinction
between resolved and unresolved scales. The spectrum of resolved
scales is directly dependent on the grid resolution used. Normally
one can only directly resolve eddies larger than the grid size. The
subgrid flow (structures smaller in size than the grid) and its effects
on the resolved part are then left to model.
The averaging in RANS and filtering in LES both lead to unknown
terms in the averaged and filtered equations, which are Reynolds
stresses in RANS and the SGS Reynolds stresses in LES. Similar to the
Reynolds stresses in RANS, the SGS term in LES needs to be
modelled to form a closed set of the fluid flow governing equations.
However, they have different physical meanings. The SGS Reynolds
stresses in LES are due to a local average of the complete field, while
the Reynolds stresses in RANS are due to a time- or ensembleaverage. The SGS energy can be a much smaller part of the total
flow than the RANS turbulent energy and thus modelling accuracy
may be less crucial in a LES than in RANS computation. SGS
modelling is the most distinctive feature of LES. Unfortunately, SGS
models of turbulent flows so far have been mainly developed for
single-phase non-reacting flows. SGS modelling for reacting and/or
multiphase flows such as that encountered in LES of liquid-fuel
injection and spray combustion is extremely scarce. In LES of
gasliquid two-phase jet flows, SGS models for the complex
multiphase flows are very immature. There is a lack of wellestablished SGS models, especially for the interactions between the
different phases. There is no SGS model available to date that could
take into account the subgrid influence of one phase that is locally
smaller than the grid size (for instance fine liquid droplets
dispersed in a gas medium) on the resolved scales. In the state-of-
3.1. Scale range separation, space filtering and mathematical
formulation
Fig. 4. Kolmogorov’s turbulent regimes in a turbulent flow.
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
energy in that region. The inertial range sits between dissipation
and energy containing ranges and this is where the transfer of
energy to successively smaller scales is taking place. An operation
of filtering can be applied to the governing equations for fluid flows,
which subsequently leads to a set of filtered governing equations,
forming the basis of the numerical solution in LES. It needs noting
that filtering can in theory be applied at any scales and does not
need to follow the distinction between energy containing range
and universal equilibrium range. It is however most beneficial in
terms of accuracy/computational cost ratio to adjust the filtering in
such a manner that most of the energy containing range is directly
resolved.
Equations describing reacting flows need to account for changes
in density and sometimes compressibility to be able to predict
phenomena like pressure fluctuations, dilatation, and thermal
expansion. This is a more complicated approach than strictly
incompressible flows. Low Mach number combustion flows are
similar to incompressible flows, but the density can change due to
heat release in low Mach number flows. In internal combustion
engines and gas-turbine combustors, the flow can be modelled
using low Mach number approximation, except in flows near the
intake valves of piston engines. In the context of LES of compressible flows, simplification of the filtered, compressible equation set
can be accomplished by introducing the density-weighted filtering,
known commonly as Favre filtering (also known as mass-weighted
filtering), so as to avoid appearance of additional SGS terms when
the compressible flow governing equations are filtered. Massweighted filtering is used for all parameters of the fluid flow
besides the pressure (and body forces in gravitational, electrical
and magnetic fields when relevant). The filtering is designated by
two symbols, namely, the overbar designates ordinary filtering,
while the tilde specifies mass-weighted filtering [56].
~f ¼ rf
(20)
r
Flow field is then decomposed into the resolved and unresolved
parts:
f ¼ ~f þ f 0
(21)
Here, ~f represents the resolved scale, while f 0 is a subgrid-scale
component. While at first glance this is similar to the way variables
are decomposed in RANS, it is important to note that this is not
decomposition into mean and fluctuating parts but distinction
between resolved and unresolved scales in LES.
The filtered quantity is obtained by applying a filtering function
given by
~f ðx; tÞ ¼
Z
G x x0i f x0i ; t dx0i
(22)
V
where V represents the domain and G is a filter function which
must satisfy
Z
Gðxi zi Þdzi ¼ 1
(23)
V
In theoretical works one uses the filter kernel to connect the
true with the filtered variables. While in theory any filtering
function satisfying the above equation can be used, three types of
filters have been commonly used, including Fourier space filter,
Gaussian filter and box filter. The Fourier space filter requires
transformation of Eq. (22) into the Fourier space using the Fourier
transformation:
b
f ðuÞ ¼
Z
141
f ðxi Þeiux dx
(24)
The filter definition in Eq. (22) will then read [57]
b uÞ u
b uÞ ¼ Gð
b ð uÞ
uð
(25)
Fourier space filter is of limited feasibility in engineering LES
[57,58]. Therefore the Gaussian and box filters are often used. The
Gaussian filter [59] is commonly specified as:
Gðx; yÞ ¼
6
3=2
pD2
"
exp 6ðy xÞ2
#
(26)
D2
where D is a characteristic filter width. For LES calculations it is best
to correlate the filter width directly with the grid size. Hence it is
convenient to specify it as
D ¼
p
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
3
Dx$Dy$Dz
(27)
where Dx, Dy and Dz are the sizes of a typical grid cell in x, y and z
directions respectively. This is one of the many possible filters.
Finally, a box filter is the same as the ‘‘grid filter’’ whereby the filter
cuts off the values of the function beyond a half filter width away.
The box filter has a unique feature in that the filtered quantity at the
filter centre represents the spatial average of the filtered function
within the filter domain. This makes it attractive for application in
finite-volume method based codes.
Applying the filtering to the fundamental governing equations
of fluid flows leads to a set of filtered equations to be solved in LES,
consisting of the mass conservation equation, NavierStokes
momentum equations for the three velocity components, and the
energy equation and species conservation equations for each of the
species present in the system for reacting flows. For a spray flow
with the liquid phase described in the Lagrangian reference frame,
the filtered governing equations for LES of the compressible,
multiphase flow can be given as follows [60,61].
~j
vr vru
¼ r_s
þ
vt
vxj
(28)
~i
vru
v
vp
ru~ i u~ j ~sij þ ssgs
þ
¼ Fis
þ
ij
vt
vxj
vxi
(29)
~j
~
vu
e
vr~
v
vu
ru~ j ~e þ qj þ hsgs
þp
þ
~sij i
j
vt
vxj
vxj
vxj
c
s
sgs
þPsgs þ Q
¼ Q_ þ Q_
~
~m
vrY
v
vY
sgs
ru~ j Y~ m rDm m þ Fsgs
þ qj;m
þ
j;m
vxj
vt
vxj
(30)
!
¼ r_ cm þ r_ sm
(31)
In the above equations, the subgrid related terms are unclosed and
,
have to be modelled, including the subgrid-scale stress tensor ssgs
ij
, velocitypressure gradient correlation Psgs , viscous
heat flux hsgs
j
sgs
sgs
work Q , species mass flux Fj;m , and species diffusive mass flux
qsgs
.
Also,
all
the
terms
on
the
right-hand side of Eqs. (28)(31)
j;m
which are due to liquid spray and combustion need to be modelled,
which may include contributions from both the resolved and subgrid scales. The diffusion terms in Eq. (31) is expressed in terms of
Fickian diffusion that is a commonly used approximation.
The modelling of the unclosed terms in the filtered equations
and appropriate treatment of the chemical (combustion) and spray
source terms in the governing equations represent the most
142
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
challenging and important task for LES of reacting spray flows.
There have been considerable efforts in modelling all these terms.
For instance, using the k equation model [62], the subgrid stress
tensor is given as
1
2
ssgs
Sij ~
¼ 2rnt ~
Skk dij þ rksgs dij
ij
3
(32)
3
In Eq. (32), ~
Sij is the resolved strain rate tensor, defined as
~j
~ i vu
1 vu
~
þ
Sij ¼
2 vxj vxi
!
(33)
pffiffiffiffiffiffiffiffi
The eddy viscosity is given by nt ¼ Cn r ksgs D using the subgrid
turbulent kinetic energy ksgs, which is provided by solving the
following equation
!
~ j ksgs
~i
vrksgs vru
v rnt vksgs
sgs vu
sgs
_ s
þW
¼ sij
D þ
þ
vt
vxj
vxj
vxj Prt vxj
(34)
sgs
In the above equation,
pffiffiffiffiffiffiffiffi the subgrid energy dissipation rate term D
3=2
is closed by C3 r ksgs =D. The values of Cn and C3 are chosen to be
_ s is the sub0.067 and 0.916 [60,61], respectively. The last term W
grid turbulence effects due to spray, which follows the original
modelling approach used in RANS CFD. The subgrid heat flux,
viscous work, and species mass flux may be modelled by the eddyviscosity concept [63]:
sgs
hj
rnt Cp vT~
¼ Prt vxj
sgs
; Q
¼ Dsgs ¼
C3 r
pffiffiffiffiffiffiffiffi
rnt vY~ m
ksgs
sgs
; Fj;m ¼ Sct vxj
D
3=2
(35)
More details of the closure of the unknown terms in the filtered
equations are presented in the following subsections.
In LES of reacting flows, an assumption is often made that in
a turbulent reacting flow the scales of the chemical processes are
separated from those of turbulence, based on the observation that
chemical reactions often occur at much smaller timescales than
those of turbulence itself. A separate, uncoupled treatment of both
turbulent and chemical processes is then possible. This is also
a scale separation, which forms the basis of many physical models
for turbulent combustion. There are however situations, where this
scale separation fails completely. For example, it has been shown
[64,65] that lean premixed flames are highly unstable and can be
quenched locally or extinguished by turbulence effects. Recent
experimental work, using high sensitivity planar laser induced
fluorescence (PLIF) imaging methods, confirmed interactions of
flame and flow field in highly turbulent regions lead to local flame
extinctions [66,67]. This phenomenon is especially important in the
context of gas-turbine combustors. Since the design of a modern
gas-turbine combustor focuses on lean combustion for lower
emission and increased fuel efficiency, the risk of flame quenching
and local extinction is increased. The so-called lean blow out (LBO)
can occur in both premixed and non-premixed flames and
substantial amount of research is devoted to this problem [68,69].
The LBO effect is also crucial for liquid sprays and atomization. LBO
may be affected by vaporization timescales and droplet residence
times. This coupling between turbulence and combustion chemistry calls for very sophisticated combustion models effective at all
flow scales and this is where the scale separation theory has serious
limitations. The coupling between combustion instability and
acoustics is another area where the combustion chemistry cannot
be decoupled from the flow field. In addition, heat release due to
the reaction causes density and velocity fluctuations which couple
the behaviour of small scales back to the large, energy containing
eddies. Considering these factors, a combustion model for LES
might be appropriate if it is not based on scale separation theory.
One of such a model for reacting flow is presented next, together
with a general discussion on SGS models for LES.
3.2. Subgrid-scale models and linear eddy mixing model for
combustion
In LES, filtering of the governing equations produced unknown
terms. Employment of modelling is therefore necessary in order to
close the equation set and make the system numerically solvable.
So far, the SGS closure in LES has been mainly developed for nonreacting, incompressible flows. In this case only subgrid stress
tensor needs to be modelled. An overview of models for the subgrid
stress of non-reacting, incompressible flows will be briefly presented in the flowing, along with modelling benefits and drawbacks. It is worth mentioning that for very dense meshes LES is
expected to approach DNS accuracy. For coarser meshes, some
argue that the numerical diffusion can reasonably reproduce the
effect of small scales on the flow but this assumption clearly
depends on the numerical algorithm used, mesh resolution and the
type of the flow. There is no theoretical foundation for this
assumption. Choosing the numerical scheme when no SGS model is
used proves to be a challenging task as we have no direct measure
of the accuracy and representation of turbulent physics [70]. It must
be noted that the stress modelling in LES is not as crucial as it is in
RANS methods. This is because modelling only represents a relatively small portion of the whole energy spectrum. In addition to
this, as LES mesh is refined, contribution of subgrid terms decreases
up to a point where theoretically the simulation would approach
DNS accuracy. Research by Fureby and Grinstein [71] showed that
SGS may not be needed for some numerical schemes. Wang et al.
[72] investigated swirling flows using LES and found that the SGS
model does not have a great influence on the results that were
compared with experimental data.
A successful SGS stress model should excel in two main aspects
sgs
[62]: (1) systematic representation of subgrid stress tensor sij by
~
utilizing the resolved flow field ui ðx; tÞ; (2) accounting for energy
flux to the unresolved scales. By far the most commonly used
subgrid-scale model is the one proposed by Smagorinsky [73],
which marked the beginning of LES. In the Smagorinsky model, the
subgrid eddy viscosity is specified as
nt ¼ ðCs DÞ2 ~S ¼ C D2 ~S
(36)
qffiffiffiffiffiffiffiffiffiffiffiffiffi
In Eq. (36), ~
S ¼
2Sij Sij and the Smagorinsky constant Cs usually
has the value of 0.10.2. The Smagorinsky model is a very popular
subgrid model that originated from the research in meteorological
field. It represents the most basic family of models known as zeroequation models. This means that representation of the subgrid
stresses relies on empirical formulas and constants and no additional equation is being solved to close the system. Obvious
advantages of this treatment are simplicity and computational
efficiency, but accuracy and universality of the model are doubtful
and limited. The Smagorinsky model states that the subgrid stress
tensor is a scalar multiple of the resolved rate of strain tensor,
which has not been proved beyond doubt. This is only true in the
dissipation range or very high Reynolds numbers and requires LES
to be performed on a very fine grid in order not to severely violate
it. Another drawback is the inability of the model to account for the
so-called backscatter. Backscatter is a process of reverse energy
transport i.e. from the unresolved scales back to the resolved ones.
Further assumption that is often questionable is the one of energy
transfer rate from large scales to the inertial subrange and its
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
dissipation in the inertial subrange balancing each other. In fact, in
most shear flows they do not balance, but remain within the same
magnitude [74]. Next step in the SGS stress modelling is the
dynamic approach to coefficient representation [75] where the
coefficient C is being determined as a part of the simulation and can
vary in both time and space. This is possible by employing the
scaling law between resolved and subgrid scales and the resulting
mathematical identity. For scaling to be possible, a new additional
filter level has to be defined. It is referred to as a ‘‘test’’ filter. This
should be of larger size than the subgrid filter and it is common to
scale it by a factor of two. The dynamic Smagorinsky model is an
improvement over the standard formulation. However, good
results haven been reported from both standard and dynamical
procedures rising doubt to the necessity of dynamic formulation of
algebraic models [76], which may be explained by the effect of high
mesh resolution. This necessitates the need to decrease the level of
empiricism in the subgrid modelling.
To reduce the empiricism in the SGS stress modelling, the socalled one-equation SGS models are next in the hierarchy of
sophistication and are proved to produce more realistic results.
They also potentially allow coarser grids to be used than it is the
case for zero-equation models without excessively compromising
accuracy. This is mainly due to the information about subgrid
kinetic energy budget that is available. Consequently, formulation
of the transport equation can be specifically tailored, reducing the
amount of assumptions in modelling. A popular one-equation
model is the k-equation model [62], as given in Eq. (34). It is also
based on the eddy-viscosity concept but contains an additional
transport equation for the subgrid kinetic energy. In this model, no
assumption of local balance between the subgrid-scale energy
production and dissipation was made. The model has been used in
spray simulations, with the equation for ksgs given in Eq. (33).
However, with the presence of a priori set empirical coefficients,
the formulation still does not account for the backscatter of
energy. In order to gain this ability, a formulation for dynamic
determination of the constants both in time and space is necessary, which can be achieved similar to the dynamic procedure of
the zero-equation model. The dynamic formulation is a logical
extension of an existing model towards more reliable and accurate
modelling results. Ghosal [70] proposed a dynamic formulation of
the one-equation model specifically to address the problem of
backscatter.
The zero-equation and one-equation SGS modelling procedures
both rely on a eddy-viscosity hypothesis where additional viscosity
is introduced at the modelling level to account for unresolved stress
effects. This is also universally used in RANS modelling based on the
eddy-viscosity concept. Within the LES framework, there are also
SGS models that have abandoned the eddy-viscosity concept, such
as the one-equation non-viscosity dynamic model known also as
the dynamic structure model [76], where the subgrid stress tensor
is estimated directly. This model also includes dynamic coefficient
determination procedure which means the test filter level is again
introduced. The equation for subgrid kinetic energy is solved for
scaling purposes and estimation of energy flow between resolved
and unresolved scales.
Another model that does not belong to the eddy-viscosity family
of models is the so-called scale similarity model [77]. The foundation of the model lies in the logic that the subgrid scales are similar
to the smallest resolved scales. If this is true, then a conclusion may
be drawn that the subgrid stress can be approximated from the
resolved quantities only. Yeo [78] attempted to prove this mathematically while Liu et al. [79] tried to assess this empirically by
performing particle image velocimetry measurements. On this
basis it was assumed that the subgrid stress tensor should be the
same as the stress tensor from the resolved scale of the flow:
143
~i u
~j u
~i u
~j
sSGS
¼ Csim u
ij
(37)
The tilde represents the original filtering, while the overbar
denotes second filtering performed at the scale gD where g 1
[79]. The values for g may differ but in general are between 1 and 2
does not guarantee sufficient
[77,79,80]. The formula for sSGS
ij
energy dissipation when used in calculations, therefore Bardina
et al. [77] added an additional term taken from the Smagorinsky
model. The updated formula reads [77]:
~i u
~j u
~i u
~ j 2ðCS DÞ~
sSGS
¼ Csim u
S~
Sij
ij
(38)
The model can be extended to compressible flow applications
[56]. For the constant Csim , it was shown by Speziale [59] that the
model is Galilean invariant only if Csim is equal to 1.
Numerical methods also play a role in SGS stress modelling. In
a discussion of SGS turbulence models, spectral methods have to be
mentioned. Unlike finite-difference and finite-volume methods
commonly used in practical CFD, spectral methods rely on
a somewhat different approach and describe the flow in terms of
frequencies and wave numbers. In order to do that, a transformation of NavierStokes equations into a Fourier space has to be
performed. Details of this approach will not be given here, as the
popularity of spectral methodology is somewhat limited to
academic and research applications. Details of this approach and
methodology behind it can be found in the work of Domaradzki
et al. [81].
The subgrid modelling procedures for LES go beyond the
problem of modelling the stress tensor for non-reacting, incompressible flows. For compressible flows, the application of the
density-weighted filtering, or Favre filtering, leads to similar SGS
stress tensor as that for incompressible flows. Consequently, the
closure issues are similar. However, the additional heat and mass
transfer in reacting flows leads to closure of additional SGS terms,
sgs
such as the heat flux hj , velocitypressure gradient correlation
sgs
sgs
P , viscous work Q , species mass flux Fsgs
, and species diffusive
j;m
sgs
mass flux qj;m in Eqs. (30) and (31). The subgrid heat flux, viscous
work, and species mass flux may be modelled using the gradient
diffusion assumption [60,61], as given in Eq. (35). However,
modelling the velocitypressure gradient correlation and species
diffusive mass flux is rather difficult and often they are neglected.
There are two reasons for which those two terms are generally
neglected in the simulations. One of them is lack of reliable closure
and second is a generally small contribution to the large-scale flow.
This logic is justifiable for non-reacting flows where variations in
temperature, pressure and species concentrations are small, and
where most of the energy is contained within the resolved scales.
Care must be however taken for flows with strong density changes,
local variations in temperature and presence of chemical reactions.
In such cases, the small contribution of those terms is not easily
justifiable anymore. Unfortunately research of closure for those
terms is currently very limited. It is also worth noting that the
subgrid viscous work can be modelled as in Eq. (35) when the kequation turbulence model is used, which may not be the same if
another SGS closure model is used. However, the modelling deficiency is somewhat lessened for very high Reynolds number flows
where the influence of subgrid diffusive processes should have
small impact. Flows in combustion engines and gas-turbine
combustors flows are mostly in the high Reynolds number regime
and neglecting viscous work term and species diffusive mass flux is
now a common approach although not an ideal one.
The eddy-viscosity concept used in gradient diffusion closure
has been successfully employed for predicting the heat flux and
stress tensor. However, it has been shown that this approach is
144
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
much less successful when it comes to species modelling in
reacting flows [82]. Alternative closure procedure exists which does
not use eddy-viscosity and gradient diffusion assumptions. It is
known as the linear eddy modelling (LEM) [83] and will be
explained subsequently. Different approach is utilized in the LEM
where direct simulation of the influence of those terms without
actually specifying them and introducing modelling is possible. The
LEM approach promises simulations of small scale turbulent fluctuations, and as such, is potentially well suited for accounting of
subgrid processes at the smallest length scales.
An extension of LES to reacting flows has gained much interest in
the last decade. The modelling of the additional terms arising from
the production and destruction of chemical species are challenging
tasks even for a traditional RANS approach. LES adds to the
complexity because of the presence of subgrid quantities and
unsteadiness. Since combustion occurs at the molecular scales,
finest scales of turbulence have profound influence on the reaction
rate. However, turbulent effects of larger scales often influence the
flame significantly, leading to flame quenching or affecting flame
stabilization, etc. The interaction of molecular diffusion, reaction
rate and turbulent stirring occurs somewhere in the inertial range of
turbulent flow and even in the viscosity influenced dissipative
range. For automotive engines, those scales can be as small as
103 mm [84]. Those interactions are highly non-linear and development of reliable models is an extremely challenging task.
Phenomena like flame-generated turbulence, flame instability and
counter-gradient diffusion should all be taken into consideration. As
noted by Pope [85], molecular and viscous dissipation ranges are not
resolved by traditional LES, hence information about interaction of
turbulence and chemical rates is contained within the subgrid
scales. Naturally, the energy containing eddies also influence the
flame, and in certain cases quench the premixed, non-premixed and
partially premixed flames [86], through the manifestation of
turbulence eddy, flame stretch rate and scalar dissipation rate.
Turbulent structures are also often used to stabilize and anchor
the flame in the burner. As a result, chemical and turbulent interactions are present throughout the turbulent spectrum [87]. Many
subgrid models for reacting LES have been developed over time
with varying degree of success. In the following, a short summary of
the approaches most commonly used in engineering applications is
presented first, followed by a brief description of the LEM which
models turbulent stirring, diffusion and chemical reaction in
a different and promising way.
The main difficulties in modelling the reaction rate term is the
highly non-linear character of the expression used to describe it.
This is clear when we look at a simplest reaction where fuel and
oxidizer create a product: F þ O/P. The production rate is specified by the following equation
_ ¼ W k r2 Y Y
u
P
P R
F O
(39)
where WP is the molecular weight of the product and the reaction
rate is given as
TA
T
kR ¼ AR T bR exp
(40)
This is an Arrhenius type dependence which is a simple description
of the finite-rate chemical kinetics, where AR and bR are constants
_
and TA is the activation temperature of the specific reaction. The u
P
c
_
term in Eq. (39) is closely related to heat release source term Q in
Eq. (30).
Expanding this expression into a Taylor power series shows that
_ is dependent not only on resolved variables like
the reaction rate u
P
density, concentration of fuel and oxidizer but also on higher order
fluctuations. It has been proved that those higher order correlations
cannot be neglected. On the other hand, direct modelling would be
extremely complex and computationally not feasible. Therefore the
most accurate approximation of this term is a fundamental trait of
a quality model. The zero-th order approach for dealing with the
filtered reaction term is its estimation on the basis of the resolved
quantities only. Subgrid contribution is neglected and the higher
order correlation terms just mentioned are not accounted for. In
this crude assumption, lack of information from the subgrid scales
leads to an assumption of perfect subgrid mixing. When a mesh is
sufficiently fine this is to some extent justifiable. Unfortunately
a sufficiently fine mesh is rarely possible in flows of engineering
interest. Overall, while the model can serve to provide mean
statistics under the above assumptions, most of them are too crude
and simply fail in most engineering applications. Poor performance
of this model was discussed by Givi [88]. One point that has to be
noted is that some researchers argue that neglecting subgrid
contributions can be compensated by the dissipative nature of
numerical procedure. This may be reasonable for low order
numerical schemes, but for the state-of-the-art high-order
schemes the justification does not seem to hold well.
Further up the hierarchy of LES combustion models is an eddydissipation based approach. A fundament condition that needs to
be fulfilled is that the combustion process is either kinetic
controlled or turbulent mixing controlled. The basis of this model
was presented by Magnussen and Hjertager [89]. The feasibility of
the approach is justified by the fact that the fluctuations of the
reactants are related to the mean values and therefore the mixing
controlled rate can be expressed by the mean reactant species.
Fureby [90] then extended their model for LES framework by
modifying the expression for reaction rate. This was expressed as
_ ; u
_ ¼ W min u
u
P
P
kin _ mix
(41)
The reaction rate depends on mixing controlled and kinetically
controlled parts which are specified as follows
2
_
u
kin ¼ kR r YF YO
_
u
mix ¼
YF YO
min
;
smix
WF WO
r
(42)
(43)
The mixing time scale smix is equal to
C D
ffiffiffiffiffiffiffiffi
smix ¼ pmix
(44)
ksgs
where Cmix is a constant.
The presence of subgrid kinetic energy in the formula makes the
model particularly suitable in simulations where the k-equation
model [62] is used for subgrid stress tensor closure. Inability to
predict slow chemistry effects aside, the biggest drawback of eddydissipation based models is the presence of constants which in
theory require fine tuning for specific cases. In practice experimental data is usually unavailable and therefore a priori analysis is
impossible. This makes another approach more attractive. It is
based on the concept of probability density function and is
commonly known as a family of PDF methods [91].
The underlying assumption for PDF methods is that the chemical state of a reacting fluid can be fully described by the PDF of
species. It is then the task of the model to predict the form and
shape of the PDF function. Once the function is described, a quantity of interest (mass fraction of species for example) can be
computed from the following formula
_ ¼
u
P
Z
Z
/
u_ K P sgs ðJÞdJ
(45)
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
where P sgs is the subgrid joint PDF, J is the space vector of random
dependent variables of interest (temperature, mass, species fraction, density, etc). The subgrid joint PDF contains all the singlepoint statistical information about the flow. There are two most
popular approaches for description of the joint PDF. The first one is
the assumed PDF method, in which the function is not calculated
directly during the simulation. Instead a given shape is used in the
simulation, usually taken from a lookup table which is prepared on
the basis of observation of mixing and chemical reaction in
experiments. This allows Eq. (45) to be calculated by either
numerical or analytical integration. The relative compactness and
efficiency of this method is offset by somewhat vague specification
of the pre-constructed PDF. This issue is magnified when one
accounts for changes in density and temperature dependence of the
reaction rate constant. This deficiency has led to creation of a more
sophisticated treatment of the joint PDF in transported PDF models.
Here, an extra equation is solved in the system. Its role is to describe
the behaviour of the joint PDF in both time and space. This makes
the model more computationally expensive, but it does not rely on
a prescribed, often generic shape of the function. Another gain is
the fact that the reaction rate term does appear in a closed form and
does not require modelling. This however comes at a cost. There are
two terms that require closure and both are extremely important in
subgrid combustion simulations. They represent the influence of
subgrid turbulent transport and small scale molecular mixing.
While solutions have been proposed to provide a closure [92], they
are scarce at this point. Moreover, the computational cost of
a transported PDF does increase significantly as already noted.
The problematic closure of subgrid-scale stirring and molecular
diffusion is the bottleneck of the transported PDF method. Nonetheless, much research has been devoted to this method applied to
LES [93].
In recent years, another method for simulating reacting flows
has emerged. It is based on conditional moments. The main
concept of the conditional moment closure (CMC) method is then
to find how the reactive scalars depend on the mixture fraction or
reaction progress variable. The CMC method can be applied to
both non-premixed and premixed flames. There are two main
mathematical procedures to derive the CMC model: the decomposition method and the joint PDF one [94]. CMC methods predict
the conditional averages and higher moments of quantities such as
species mass fractions and enthalpy, conditional on the mixture
fraction or reaction progress variable having a particular value. The
CMC model calculates conditional moments at a specified location
in the space by means of transport equations for the conditional
moments of the reactive scalars. No assumptions regarding
chemical timescales or small scale structures of the reaction zones
are made. The drawback of the model is that the mixture fraction
carries all information about temperature and the state of reactive
species only when running under low Mach numbers and without
significant differential molecular diffusion. This limits somehow
the ability of the model since many combustion engineering
problems deal with relatively high Mach numbers. The molecular
diffusion can also be significant and thus violate the underlying
assumption.
A promising model used in LES of reacting flows is the already
briefly mentioned LEM (linear eddy model) approach. It was
initially developed by Kerstein [83] as a stand alone approach for
simulating transport and mixing of diffusive scalars. It was later
recognized as a promising method for calculation of the subgrid
terms [95]. The fundamental trait of LEM is the separate treatment
of molecular diffusion and turbulent convective stirring. This is
what makes this formulation unique. All previously described
approaches aim to model molecular mixing and small scale
turbulence effects as a single process, which is often too much of
145
a simplification. In addition, the assumption of scale separation
theory is avoided in LEM. The model can be applied to both premixed and non-premixed applications because no specific
assumptions are made with regard to the state of reactants and
oxidizers and flame behaviour. The idea of LEM is to directly
resolve chemical process and molecular diffusion at appropriate
length and timescales within each LES cell. If so, then subgrid
terms such as subgrid species mass flux as given in Eq. (35), are
not modelled anymore using an often dubious gradient diffusion
assumption but are directly resolved instead. This also removes
the modelling of the species diffusive mass flux as this term does
not exist in LEM. The subgrid heat release and reaction rate which
are difficult to model are also not estimated anymore but directly
resolved. In a LEM approach, combustion modelling occurs directly
at the subgrid level, on its exclusive time and length scales. The
obtained species concentrations are then subjected to threedimensional (3D) turbulent fluctuations. Again, those are not
modelled in a sense of eddy viscosity but rather directly resolved.
The key to the computational feasibility of this DNS-like approach
is that the subgrid space is confined on a one-dimensional (1D)
domain instead of full 3D DNS.
Although the LEM is a 1D approach, the effects of 3D turbulent
eddies on the scalar field can still be accounted for by means of
triplet mapping process [96] which reverses and compresses
randomly chosen segments from the 1D scalar field. This is akin to
an action of randomly sized, 3D turbulent eddy acting on the scalar
distribution. It has to be noted that in LES with subgrid LEM
procedure, two simulations are carried out simultaneously. One is
a classic, resolved scale LES aiming to capture the energy containing
range of eddies, and the other is a subgrid 1D simulation of the
molecular processes, chemical reaction and diffusion and turbulence effects that cannot be resolved by the large-scale grid. Those
two simulations must be coupled with each other. The exact
procedure of passing information from the unresolved to the
resolved scales is described later on. It is now sufficient to note that
the conservation of mass, momentum and energy at the large-scale
LES level is fully coupled with conservation of mass, energy and
species at the subgrid LEM level. The LEM procedure is based on the
following assumptions:
Subgrid-scale turbulence is homogeneous and isotropic.
The pressure in the subgrid scales is assumed constant (a direct
consequence is that thermal expansion effects need to be taken
into account whenever reacting flows are dealt with).
The contribution from the subgrid viscous work is not
accounted for.
The 1D domain is not arbitrarily aligned in space.
The mathematical description of the LEM comprises the
description of the 1D equation and its terms, the specification of the
domain length, triplet mapping process and finally coupling with
the large scales by means of splicing algorithm. The direct subgrid
treatment of the scalar evolution makes the species conservation,
Eq. (31), redundant. Consequently, all the filtered species subgrid
terms that needed closure do not exist anymore. The decomposition of velocity in terms of LEM [68] can be given as
~ i þ u0i R þ u0i S
ui ¼ u
(46)
~ i is the LES-resolved large-scale velocity, ðu0i ÞR is the
In Eq. (46), the u
subgrid velocity fluctuation (obtained from the equation for subgrid turbulent kinetic energy) and finally, ðu0i ÞS is the unresolved
subgrid fluctuation. Then the exact species equation (i.e. without
any explicit LES filtering) can now be rewritten in terms of those
velocity components
146
r
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
h
ivYm
vYm
v
~ i þ u0i R þ u0i S
rYm Vi;m þ u_ m þ S_ s;m
¼ r u
vt
vxi
vxi
(47)
In Eq. (47), u_ m and S_ s;m represent the reaction and spray source
terms of m species respectively, while the diffusion velocity is
obtained using Fick’s law Vi;m ¼ ðDm =Ym Þ ðvYm =vxi Þ. It is noted
that the equation is not filtered and hence no terms appear that
would need additional closure. Eq. (47) can be split in two to better
describe the coupling of large scales with LEM (convection of the
scalar field) and subgrid processes that occur exclusively on the
subgrid domain
h
* Yn
n
R ivYm
Ym
m
¼ ui þ u0i
DtLES
vxi
nþ1
Ym
*
Ym
¼
tþ
ZDtLES
t
(48)
n
1 S vYm
v
r u0i
þ
ðrYm Vi Þn u_ nm
r
vxi
vxi
n
S_ s;m dt
(49)
Eq. (48) describes the large-scale 3D LES-resolved convection of the
scalar field, while Eq. (49) is a description of the evolving subgrid
field. The four terms under the integrand on the right-hand side of
Eq. (49) represent subgrid stirring, molecular diffusion, reaction
kinetics and phase change of the liquid fuel respectively. Those
processes occur at a substantially smaller time scale than the LES
time step.
In subgrid linear eddy modelling, each grid cell on which the
flow is resolved by large-scale algorithm contains a 1D domain
along which a basic reaction diffusion equation is solved. This is the
domain s. It is equal in length to the filter width and consequently,
directly related to the grid size. Eq. (49) can now be rewritten as
In order to solve the 1D equation on the s domain it has to be
discretized not unlike large-scale governing equations. This means
that s domain must be split into cells, or rather, 1D elements. The
amount of subgrid LEM cells in a simulation is a compromise
between accuracy and computational cost of the subgrid 1D
simulation. Ideally, the number of cells is estimated by the criteria
that the eddies from a dissipative Kolmogorov range must be
resolved. Unfortunately, for a very large number of LES cells, this
may turn out to be prohibitive in terms of memory requirements
and number of LEM cells must be reduced. Typically, six subgrid
cells should be sufficient to resolve the small turbulent scales [97].
This is also the minimum number to perform the triplet mapping
on the scalar field. For chemical scales, the number of cells may
need to be increased, depending on the details of the chemistry
modelling. Multistep mechanisms are likely to need more LEM cells
in order to capture effects at the molecular level. The mathematical
background does not prohibit employing a variable number of LEM
cells for each LES cell. This is a potential to reduce the memory
impact as laminar and low Reynolds number region of the flow do
not need very high resolution. Moreover, highly turbulent regions
would likely benefit from increased number of cells. This gain is
however offset by the more complicated coding procedure of
parallel algorithms. Consequently, the number of cells is mostly
specified as a constant number which means that some regions
have unnecessarily fine resolution. The proper procedure for
determining the correct amount of cells is based again on the
concept of Kolmogorov scales and the local subgrid Reynolds
number defined as
ReD ¼
u0 D
n
(52)
where the u0 is the subgrid turbulence intensity obtained from ksgs
rffiffiffiffiffiffiffiffiffiffiffi
2ksgs
u ¼
3
0
(53)
The Kolmogorov scale [55] can then be estimated as
vY k
v
k
k k
r m
rYm
¼ Fsk Vs;m þ u_ m þ S_ s;m
vt s
vs
(50)
D
where t s stands for a LEM local timescale that is usually much
smaller than the resolved flow timescale. This is because the limits
on the subgrid time step size are determined by the diffusion and
reaction processes which are typically couple of orders smaller than
the timescales of large, energy containing eddies. It is noted that the
equation does not contain convection term due to the turbulent
motion. This is modelled stochastically by means of triplet
mapping. The first term Fsk on the right-hand side expresses the
turbulent convection of the species. The second term is the subgrid
molecular diffusion with the diffusion velocity usually specified in
accordance with Fick’s Law
Vi;m ¼ 1
vYm
Dm
Ym
vs
hK ¼ DRe3=4
(51)
where Ym and Dm are the mth species mass fraction and diffusivity
respectively. In Eq. (50), the u_ m term represents the reaction and
can be modelled using many available chemical mechanisms
k
varying in accuracy and computational cost. The S_ s;m is a source
term arising from the droplet evaporation at the subgrid level.
While present here for explanation purposes, the models for subgrid droplet evaporation are scarce and its contribution is very
often neglected in the simulations, that is the evaporation and the
subsequent energy and mass transfer are accounted for only at the
resolved scales.
(54)
In principle, the number of LEM cells is related to the LES filter
width and the above size of the Kolmogorov length scale. The
length of the LEM domain is equal to that of the local LES filter
width D, and the number of LEM cells is chosen so that all of the
relevant scales are resolved. Typically, the smallest eddy (e.g. the
Kolmogorov scale hK ) is resolved using six LEM cells [68].
The idea of directly resolving Kolmogorov scale structures,
chemical reactions and molecular diffusion puts severe limitations
on the numerical time step. Each of those processes has its own
respective timescale. All of them are significantly smaller than the
value used for large-scale flow. This means that the 1D equation has
to be solved with different time stepping than LES. Within the
subgrid LEM domain, four distinctive timescales can be distinguished as: molecular diffusion timescale Dtdiff based on stability of
the numerical scheme employed, chemical timescale Dtchem
depending on the reaction rate and the numerical scheme, turbulent stirring timescale Dtstir mimics the frequency of subgrid eddies,
and thermal or volumetric expansion timescale Dtvol . From those
scales, one must be chosen which will then be used throughout the
subgrid simulation. The diffusion time is appropriate because it is
the process that governs both the chemical and thermal expansion
timescales.
An important procedure in the LES-LEM is the triplet mapping
[96], which is a method of simulating the influence of threedimensional turbulent eddies on a scalar field. In order to
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
successfully employ this method, some variables need to be derived
first. Local eddy size, frequency with which stirring event occurs
and the location of the event within the s domain complete the
needed data. The triplet mapping mimics the effect of turbulent
eddy on a scalar field by dividing part of the LEM domain into three
parts, then compressing them by a factor of three and reversing the
middle one. The details can be found in Ref. [96]. The local eddy size
is a part of the s domain that will undergo the mapping process.
This size is picked up randomly from an eddy size probability
function f ðlÞ. It has to be contained within the range bounded by
Kolmogorov length scale on one end and size of the LEM domain on
the other, therefore
hK l LLEM
(55)
The function is specified as
f ðlÞ ¼
ð5=3Þl8=3
h5=3
K
D5=3
(56)
The frequency of the stirring event occurrence can be compared
to the turbulence intensity and indeed is dependent on the subgrid
Reynolds number
h
i
5=3
54 nReD ðD=hK Þ 1
i
h
l ¼
5 Cl D3 1 ðh =DÞ4=3
K
(57)
The final procedure of subgrid LEM calculations is the coupling
with the large scales by means of the splicing algorithm [63,68].
While not explicitly part of the LEM simulation, splicing is nevertheless essential in an LES with subgrid LEM treatment, with details
found in Refs. [63,98]. For reacting flows, a re-gridding process
should also be employed. This is because combustion introduces
volumetric expansion of the LEM elements. In a standard RANS or
any other large-scale resolved combustion simulation, the heat
release caused by chemical processes is reflected in a pressure and
temperature increase. One of the main LEM assumptions listed
before however states that the pressure within LEM cell is assumed
constant. If so, the elements must expand in order to satisfy the gas
equation of state. The expanded or contracted cells (this depends
on the temperature change) must be then re-gridded to maintain
equal size of the LEM domain. Details of re-gridding can be found in
Refs. [63,98].
The uniqueness and attractiveness of the linear eddy modelling
lie in the separate treatment of molecular diffusion and turbulent
effects. All scales of the flow are being resolved on a subgrid, onedimensional domain. Gradient diffusion approach, eddy-viscosity
assumptions and associated limitations are avoided. Closure of
subgrid terms arising from LES space filtering is not necessary as
those terms are accounted for differently in LEM. The drawbacks of
the model are computational cost which can be very high for high
Reynolds numbers and reacting flows, possible slight mass
conservation errors (this would depend on the refinement of the
splicing algorithm) and finally, discontinuities in the 1D scalar field
introduced after the triplet mapping.
There are other LES modelling methodologies for turbulent
reacting flows. One possible approach proposed by Williams [99] in
the context of RANS is the use of a level-set approach to describe
the turbulent flame front. In this methodology, the flame front is
represented by an arbitrary iso-surface G0 of a scalar field G whose
evolution is described by the so-called G-equation. This equation is
only valid at G ¼ G0 and is hence decoupled from other G levels.
There have been various attempts to use this approach in LES of
turbulent combustion, e.g. [100102]. One modelling challenge
that is unique to the G-equation is that the flame is only
147
represented by a surface. In addition, for using the G-equation in
LES, the accuracy of numerical schemes used for advection and the
so-called re-initialization process, are particularly important [103].
In the modelling of combustion effects on the reacting flows, an
attractive approach is the recently developed flamelet-generated
manifolds (FGM) approach, e.g. [103108], where the combustion
chemistry can be described by a flamelet library. The numerical
modelling of realistic combustors with realistic representation of
the combustion chemistry puts a very high demand on computational resources. The computational cost of combustion simulations
can be reduced by techniques that simplify the chemical kinetics
such as the FGM. The most significant merit of FGM is that it can
reasonably represent the chemistry without incur much additional
computational costs for reacting flow simulations, which is
particularly appealing for advanced CFD approaches such as DNS
and LES that are computationally very costly.
3.3. Numerical issues for LES of spray flow and combustion
Modelling and simulation of fuel injection and spray combustion is a very difficult subject, involving not only combustion
phenomena but also multiphase flow phenomena. It can be seen
from the previous subsection that LES of combustion is already
a very complex subject, which can only be more complicated with
the involvement of multiple phases. In engineering applications,
most of the reacting flows are inherently related to two-phase
modelling because the fuel is a liquid while the combustion always
takes place in the gas phase after the fuel vaporization. Gas-turbine
combustors and internal combustion engines all predominantly use
liquid fuels. LES has been proven to be superior to RANS approach
in terms of the prediction of transient fuel injection, e.g. [109],
mainly due to the fact that LES avoids the time- or ensembleaveraging employed in RANS approach that can possibly lead to
failures in predicting the flow unsteadiness such as vortical structures. It was demonstrated [109] that LES can predict the vortical
structures in transient fuel jets including the experimentally wellobserved head vortex [110], using the same liquid-phase modelling
and numerical resolution as in RANS approach, where these
vortical structures cannot be predicted. Due to the complexities
involved, many existing LES of spray flow and combustion employs
the same liquid-phase models as those used in RANS approach,
with a SGS model used for the gas-phase turbulence. Although
useful results can be obtained, there is no guarantee that the liquidphase models such as those discussed in Section 2 are most
appropriate. This subsection briefly presents the liquid-phase
modelling together with discussion on some issues and challenges
encountered in LES of spray flow and combustion.
In LES and RANS studies of spray flows using the Lagrangian
frame of reference for droplet tracking, the computation can provide
detailed information of liquidgas interaction with relatively small
diffusion error. It can also account for various droplet sizes which are
very important as droplet sizes influence the vaporization rate and
the effectiveness of atomization and breakup rate. All of those have
an either direct or indirect effect on heat release and reaction rates,
especially in lean combustion applications which are increasingly
popular in order to reduce pollutant emissions. However, the
approach is inefficient when tracking a very large number of droplets, which becomes computationally infeasible for dense sprays
with a huge number of droplets and the atomization region near the
nozzle where large bulks of liquids present. In order to partially
overcome this, a concept of computational parcel was introduced.
This is basically a sampling technique where instead of tracking an
individual droplet, a number of droplets (parcel) are tracked
together. All droplets within a single computational parcel have
identical parameters (temperature, size, velocity, etc.) This approach
148
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
has been broadly used in spray simulations, e.g. [68]. Although the
‘‘parcel’’ concept is not ideally suited for LES due to the averaging
introduced into the liquid phase, it has nevertheless been used by
researchers. Besides computational efficiency, another drawback of
using the Lagrangian method for droplet tracking is the time step
limitation for the liquid phase and its governing equation integration. Due to its dominant use in spray simulations, the remainder of
this subsection is devoted to the Lagrangian approach. Extensive
review on the subject was conducted by Sirignano [111]. It is
however necessary to point out that Eulerian treatment of liquid
phase is also possible, e.g. de Villiers et al. [112] presented an
Eulerian liquid-phase treatment by means of utilizing the volume of
fluid modelling procedure. However, the Eulerian approach has
been mainly used for atomization process near the nozzle exit rather
than the downstream dilute spray regions.
The governing equations for droplet motion in LES of spray flows
is given below, in a form slightly different from those given in
Section 2 for droplet kinematics. The formulation follows Menon
and Patel [68], under the assumption that the Kolmogorov scale is
of the same order or larger than the largest droplet in the spray
field. For such a situation, the interaction between gas and liquid
phases is dominated by laminar fluid dynamics. The equations then
read
dxi;d
¼ ui;d
dt
(58)
dmd
_d
¼ m
dt
(59)
dui;d
3 CD mRed ui ui;d
¼
dt
16 rd rd
(60)
md cd
dTd
_ d Lv
¼ hd pd2d T~ Td m
dt
(61)
In these equations, subscript d denotes a droplet related quantity,
while dd is the droplet diameter, hd is the heat transfer coefficient
calculated by the formula proposed by Faeth and Lazar [113], L v is
the latent heat of vaporization usually given by the correlation of
Miller and Bellan [114], and md is a mass of particle given by
md ¼ ð4=3Þp rd3 rd .
The influence of the particles on the gas-phase flow is reflected
in the spray source terms, such as the Fis and rsm appearing in the
momentum equation and species conservation equation for the gas
phase respectively. It can be clearly seen that the coupling between
phases is of two-way nature. The droplets are influenced by the
resolved scale velocity and temperature and the resolved flow
receives contributions from evaporated liquid as well as drag of the
droplets (momentum change). The procedure for the computation
of the liquidgas-phase exchange terms in equations is described
in detail in Ref. [68]. Here only the brief outline is presented. The
four coupling terms are calculated as follows
0
0
B
B
B
B
@
r_ s
s
F_ i
s
Q_
_S
s;k
1
C
C
C ¼
C
A
0
dmd
B dmdt u
B d i
B
B dt
B dmd ed
@ dt
dmd Ym
dt
dVd
dr
þ Vd d
B rd
dt
dt
B
1
C
C
C
B
du
dm
C
B
i;d
d C
C
C
B md
þ ui;d
C
B
dt
dt C
C ¼ B
C
C
B
de
dmd C
A
C
B md d þ ed
B
dt
dt C
C
B
@
dYk;d
dmd A
þ Yk;d
md
dt
dt
1
(62)
In Eq. (62), ed is the total energy of fuel droplet and Vd is the volume
of the droplet. The volume-averaged source terms for all of the
droplet group trajectories that cross a computational cell are
computed by summing the contribution from every droplet group
for n number of droplets as follows
1
0 P
dmd
dt
e
C
B n
r_ s
B P dmd ui C
B e_ s C
C
B
B Fi C
B n dt C
B s C ¼ B P
C
B e_ C
B
dmd ed C
@Q A
B
dt C
C
B
n
e_
@P
dmd Ym A
S
0
1
s;k
n
(63)
dt
The state-of-the-art droplet modelling in LES should account for
subgrid turbulent motion and its effect on turbulence. In Menon
and Patel [68], the stochastic dispersion of droplets caused by
turbulent motion is incorporated by representing the gas-phase
velocity at particle location as
~i þ X
ui ¼ u
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
2ksgs =3
(64)
In Eq. (64), X is a randomly generated number sampled from
a uniform distribution with zero mean. The fluctuating subgrid part
of the velocity can be also modelled using different expressions and
stochastic methods [115]. Because droplet dispersion and evaporation rates are estimated based on resolved gas-phase quantities, it
may be necessary to obtain this data in locations where droplet
does not lie on the grid point. When the mesh is sufficiently fine,
values from a nearest grid point or cell centre can be used. If
however the mesh is relatively coarse, averaging based on neighboring cell points must be used to give a correct estimation.
In LES of spray flows, droplet breakup modelling has to be
introduced. Although many models have been used in the past like
the TAB model [38] or the ‘‘wave’’ model [39] with success in RANS
simulations, LES has introduced more challenges into the droplet
breakup modelling with which existing models are not always able
to cope. However, there is still a lack of well-established liquid
breakup models that are highly suitable for LES. The turbulent flow
field in fuel injection leads to complex breakup processes that
produce droplets of varying sizes. The liquid breakup can be a very
complex phenomenon, calling for sophisticated breakup models.
There have been some recent attempts in the filed, for instance, the
model of Gorokhovski [116] that is able to account for highly
varying droplet breakup sizes. This model was coupled with LES of
an atomizing spray flow [117], where the results included a broad
spectrum of droplet diameters. They also developed an algorithm
for simultaneous treatment of computational parcels and individual droplets in the flow which is very beneficial for unsteady,
highly turbulent LES. A review of multiphase modelling was performed by van Wachem and Almstedt [118], where more detailed
information can be found.
Finally, there are some typical issues that need attention when
performing LES of atomization and spray flows. The need to use fine
grids is of paramount importance. While LES can be performed on
RANS mesh with useful results obtained, the accuracy will be very
limited due to the fact that not all the energy containing range
eddies are solved directly and subgrid models would have to
account for the levels of energy they were not designed for. Subgrid
closure of the stress tensor has already received great attention
among researchers and various models have been proposed in the
last two decades, in an effort to continuously improve modelling
accuracy. Most of them rely on the well-known eddy-viscosity
concept but there are some where this assumption is avoided. Most
engineering applications of reacting LES deal inseparably with
liquid fuels. This calls for sophisticated models for droplet tracking,
dispersion and atomization modelling and droplet breakup. In
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
many applications, the sprays are very dense and subgrid processes
associated with liquid phase should not be neglected. Unfortunately, subgrid two-phase models are scarce and much more
research is necessary before they will become acceptable. The
modelling of combustion, especially important in LES because of its
occurrence in the subgrid space has received a great deal of interest
and still many issues remain, like the limitations of eddy-viscosity
and gradient diffusion assumptions. Models now exist that are not
based on those, but computational cost may be prohibitive for
complex geometries. In addition, many fluid flows with high
industrial importance are wall bounded. Near-wall regions are
a bottleneck of LES. RANS-derived law-of-the wall modelling
cannot be directly used, and if near-wall structures are to be
directly captured by LES, the mesh sizes increase rapidly beyond
computing capabilities. Models for liquid films on the walls, so
important for internal engines applications, are non-existent in
current LES of spray flows. In addition to issues of the wall treatment, other boundary condition specification in LES is also much
more complicated than in RANS methods. The main reason for this
is that the flow unsteadiness at the domain inlet must be accounted
for. The fluctuating velocity at the flow boundaries can in some
applications significantly influence the results. Therefore, comparison of first and second velocity moments of the velocity field with
experimental data is often desirable [119,120]. In addition,
boundary conditions for the liquid phase at the domain inlet (such
as the droplet distributions) and at the walls are also very important in two-phase flow simulations. Nevertheless, these issues do
not prohibit LES from being applied to complex two-phase reacting
flows. Constant research and improvement of models in the last
two decades has established LES as a viable and often superior
alternative to classic RANS approach and will continuously to do so
in the foreseeable future. One of the major bottlenecks for industrial applications of LES is still the high computational cost
compared to RANS, mainly due to the need for significant finer
mesh and higher order numerical schemes. A comparative RANS/
LES study of diesel fuel injection and mixing using the same
numerical methods [121] showed that the mesh resolution needed
for LES could be 20 times higher than that for RANS, meaning that
the computational time could increase about one hundred times on
a serial machine since the time step becomes smaller when the
mesh is refined. Fortunately, as computer power increases
constantly, LES will become more affordable and more attractive.
4. DNS-like simulations of gasliquid two-phase flows for
atomization and sprays
Numerical studies of fluid flows based on the traditional RANS
modelling approach could lead to poor predictions of highly
unsteady and complex flow phenomena involving vortical structures due to the intrinsic time- or ensemble-averaging of the governing equations. LES can partly overcome this problem, but only
the major part of the turbulent motion can be resolved. The most
accurate and straightforward numerical approach to fluid flow
problems in the continuum limit is to solve the NavierStokes
equations without averaging or approximation other than numerical discretizations whose errors can be estimated and controlled.
Thus, all the relevant time and length scales are resolved. This
approach is the so-called DNS. The computed flow field obtained is
equivalent to a single realization of a flow or a short-duration
laboratory experiment. The major disadvantage of DNS is that it is
computationally too expensive, even for solving very simple flow
configurations. For instance, in homogeneous isotropic turbulence,
the number of grid points required in each direction must be of the
order of Re3=4 and hence, the cost scales are of order of Re9=4 [85].
149
Although the governing equations are solved directly in DNS,
the use of some kind of models to accommodate the multiphase
formulation and interaction are always needed for multiphase flow
systems. Thus, multiphase simulations can be regarded to be ‘‘DNSlike’’ and not ‘‘pure DNS’’, as stated by Sirignano [111] ‘‘The DNS
methods as applied to two-phase flows have not been truly without
any modelling in a fashion analogous to single-phase flows.
Applications have been confined to situations in which the smallest
scale of turbulence is considerably larger than the droplet or the
particle size. Since the velocity gradients on the scales of the
droplet diameter and boundary-layer thickness are not resolved,
the vorticity generated by means of the droplet-gas interaction are
not determined.’’
DNS of fuel injection and spray combustion represents an
extremely challenging problem, involving multiphase and
combustion modelling. The multiphase and combustion modelling
issues are somehow different from that in LES (arguably simpler),
since all the flow scales are resolved in DNS in principle. However,
the paramount requirement for a DNS-like simulation would be
keeping the usually prohibitively high computational costs relatively low so that it can be feasible. Therefore, ‘‘cheaper’’ but still
accurate multiphase and combustion modelling is always
preferred. For combustion modelling, the flamelet-generated
manifolds approach [104108] can be a useful way forward, which
can be combined with the fluid flow solver without incurring
significant amount of additional costs. Different from LES, both
Lagrangian approach and Eulerian approach can be used for the
liquid phase in DNS. For liquid breakup and atomization or dense
sprays, Lagrangian approach is normally not preferred in DNS, due
to a lack of model for the particle dynamics, multi-way interactions,
and the blobs. The available models are not able to describe
correctly the blob/droplet behaviour. On the contrary, Eulerian
approach may be used in DNS, focusing on the liquid breakup
region or dense spray region near the nozzle, in an effort of
obtaining understanding that are not possible using other numerical means or experimental means. In this context DNS can be
a very powerful tool that not only leads to a better understanding of
the fluid mechanics involved, but also provides useful databases for
the potential development of physical models for liquid breakup
and atomization. Since combustion can be treated more or less
separately in this case, the following subsections will be focused on
non-reacting flow simulations.
4.1. Overview of multiphase flow modelling for a DNS-like
simulation of atomization and sprays
One of the key divisions between the various multiphase
numerical methods is that of the reference frame for treating the
dispersed phase. Continuous-flow CFD simulations are generally
considered in an Eulerian reference frame while the dispersed
phase characteristics are commonly treated with either the Eulerian or the Lagrangian representations. The continuous-flow simulations are typically carried out in an Eulerian reference frame since
it provides the most computationally efficient description for
solution. Different spatial discretizations for the fluid characteristics (velocity, temperature and pressure) can be considered while
these discretizations can be used with finite-difference, finitevolume and finite-element treatments. In cases where the particles
are small in size compared to the grid resolution of the continuous
phase, a natural approach is to use particle trajectories, i.e. the
Lagrangian representation for the dispersed phase and thus the
flow system is called EulerianLagrangian. In this case the particle
characteristics (velocity, position, etc.) are declared and updated
along the particle path lines, as described in the previous section. In
contrast, the Eulerian representation for the dispersed phase
150
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
generally declares the particle characteristics at nodes coincident
with those of the continuous phase grid. In return, the flow field is
called EulerianEulerian or, quite frequently, for the sake of
convenience, just Eulerian.
The Eulerian treatment may describe the particle concentration
through a volume fraction Fp which is the fraction of the computational volume composed of particles, and where the volume
fraction taken up by the continuous-fluid phase is Ff such that
Fp þ Ff ¼ 1. The dispersed phase can be further classified into the
following categories: mixed-fluid vs. separated-fluid approaches (if
the reference frame is Eulerian) and point-force vs. resolvedsurface treatments (if the reference frame is Lagrangian) [122,123].
The Eulerian description applied to the dispersed phase generally assumes that the characteristics of the particles can be
described as a continuum. This assumption allows the dispersed
phase to be treated with the same discretization and similar
numerical techniques as those used for the continuous phase.
Furthermore, the Eulerian approach gives an overall picture of the
flow field compared to the Lagrangian approach where essentially
particles are followed in the solution. Eulerian techniques can be
subdivided into mixed- and separated-fluid approaches. The
mixed-fluid approach assumes that the continuous and the
dispersed phases are in local kinetic and thermal equilibrium, i.e.
the relative velocities and temperatures between the two phases
are small in comparison to predicted variations in the overall flow
field [122,124]. The mixed-fluid treatment distinguishes only the
volume/mass fractions of the dispersed and continuous phases in
a mixed volume. Since the velocities and temperatures of both
phases are now assumed to be represented by single values, the
mixed-fluid treatment has also been named ‘‘locally homogeneous
flow’’ [7], ‘‘single-fluid scalar transport approach’’ and ‘‘modifieddensity approach’’ [123]. The use of mixed-fluid approximation
results in a single set of momentum equations for the flow mixture.
The mixed-fluid set of equations is inherently a two-way coupled
system since all phases act in concert (thus the gas-phase physics
depend on the liquid-phase physics and vice versa). The separatedfluid approach assumes that both the continuous and dispersed
phases comprise two separate, but intermixed, continua. Therefore,
two sets of momentum equations are needed: one for the continuous phase and one for the dispersed phase. This approach is also
known as the ‘‘two-fluid’’ method since two sets of partial differential equations are required. The same principle applies to the
energy equation as well. Thus, the relative velocities and temperatures of the two phases are not necessarily zero, compared to the
mixed-fluid treatment. It is worth mentioning that the solution of
two sets of governing equations in a separated-fluid approach
significantly increases the overall computational cost.
An appealing multiphase DNS approach is based on the onefluid formalism [124], similar to the concept of mixed-fluid treatment, in which the methods are based on solving a single set of
transport equations (NavierStokes equations) for the whole
computational domain and the different phases are treated as
a single fluid with variable material properties. Changes in these
properties are accounted for by advecting a phase indicator function and the heat and mass transfer between different phases can
be accounted for. In the context of this approach, advanced interface tracking algorithms [125] can be employed and the interfacial
exchange terms can be incorporated by adding the appropriate
sources as delta functions or smoothed gradients of the composition field at or across the interface [124].
In simulations of multiphase flow problems, gas compressibility
is also a relevant issue. The liquid phase is by nature incompressible
while in atomization processes the gas phase is usually of high
speed with compressibility not negligible. The use of a compressible code in a mixed-fluid treatment is possible but the
incompressible nature of the liquid still yields problems through
the liquid transportation advection equation [126]. Efforts have
been made recently on how the mixed-fluid treatment can be used
in gasliquid two-phase flows with the gas phase treated as
compressible [127130], where gas-phase pressure can be calculated from an equation of state. In incompressible flows the pressure is calculated from the Poisson equation, which can be derived
from continuity and momentum equations. Richards et al. [126]
described a method in which the pressure iteration procedure can
handle no-slip problems without the need for explicitly specifying
the boundary conditions.
In terms of the Lagrangian reference frame, the dispersed
phase can be classified into point-force and resolved-surface
treatments. For the point-force approach, the particle is commonly
described at a single point that moves at its own (independent)
velocity. Each particle is treated individually but with a point-wise
representation. If a point-force approximation is used, individual
particle trajectories are computed in the Lagrangian-sense, while
the continuous phase is typically treated throughout in an Eulerian-sense. For a large number of particles, computational ‘‘parcels’’
can be used where each parcel represents a cloud of many particles with the same characteristics as described in Section 3. The
size of the parcel cloud must be less than the continuous phase
local grid resolution, d < Dx, where d is the effective particle/cloud
diameter and Dx the effective cell resolution. It is worth
mentioning that the point-force approach requires the use of
models to describe drag, lift and other mechanisms. If a resolvedsurface approach is used, the detailed flow around each particle
must be solved to a high resolution. Then the flow solution can be
numerically integrated over the surface to obtain the net
momentum interaction of the fluid on the particle. Thus, the
Lagrangian approach updates the particle position based on its
integrated interaction [111,122,123]. The resolved-surface treatment requires that the computational resolution is sufficient to
describe the detailed stress distribution over the particle surface
and thus, d[Dx. This yields a major drawback which is that the
computational requirements for many continuous-fluid grid
points around each particle are quite high, and thus simulation of
many particles is generally impractical on even the most advanced
computer systems [122]. Both the point-force and the resolvedsurface approaches are graphically represented in Fig. 5. The full
mathematical formulation of the Lagrangian methodology can be
found in the review of Loth [131].
For a better understanding on the differences between the
point-force and resolved-surface treatments, one can consider
a dynamic equation for the particle given as [122]
mp dv=dt ¼ Fbody þ Fsurf þ Fcoll
(65)
where v is the velocity at the particle centroid xp and mp is the mass
of the particle. In Eq. (65) the particle equation of motion is an
Fig. 5. Representation of the point-force and resolved-surface treatments.
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
ordinary differential equation along the particle path line. The lefthand-side of Eq. (65) represents the particle mass times the
acceleration of particle along the path line. On the right-hand side,
Fbody represents body forces which are proportional to the particle
mass (e.g. gravitational acceleration), Fsurf are the fluid dynamic
surface forces and Fcoll are the collision forces (e.g. particleparticle
or particlewall collisions). Neglecting electromagnetic and other
body forces, Fbody for a spherical particle, that takes into account
gravity effects, can be given as Fbody ¼ gmp ¼ g rp Vp . The specification of the surface forces Fsurf can be distinguished in the
resolved-surface and the point-force approaches. In the resolvedsurface approach the surface force is computed by integrating the
pressure and shear stress as given below
Fsurf ¼
Z h
p þ m vui =vxj þ vuj =vxi
i
nj dAp
(66)
where Ap is the particle surface area and nj the j-projection of the unit
normal vector outward from the surface. Eq. (66) incorporates all
surface forces (lift, drag, etc) and thus no assumptions of particle
shape, particle Reynolds number, and flow acceleration/gradients are
required in this formulation. The resolved-surface approach for the
specification of surface forces is the most accurate methodology as it
allows the capturing of physically realistic surface topology and
surface force. On the other hand, it is the most computationally
intensive methodology per particle. The resolved-surface technique
is thus only reasonably applicable in cases where there is a single
particle or modest number of particles in the computational domain.
If the number of particles is too high then the point-force
approach can be used in the computation of the surface forces. The
point force is a single equation approach and the force on the particle
is described without resolving the surrounding particle surface. A
surface-averaged force is employed in the point-force treatment
which is based on analytical expressions of a linear combination of
specific forces. The major assumption of the point-force treatment is
that the surface forces are related to the continuous-fluid properties
extrapolated to the particle centroid ðxp Þ. For example the pointforce velocity and vorticity at the particle centroid can be defined as
u@p and u@p . Based on this assumption the continuous-fluid velocity
is defined everywhere and thus u@p zuðxp Þ. If the flow in the particle
region is non-linear then the employment of a single-point velocity
may not be sufficient to characterize the surrounding conditions.
Thus a relative particle velocity is defined which allows specification
of the direction of hydrodynamic forces (e.g. drag which opposes
velocity w)
w ¼ v u@p
(67)
The lift force L can be defined in a similar manner and is
perpendicular to w and the relative particle rotation ðUrel Þ in
respect to the fluid. The relative particle rotation can be given as
1
2
Urel ¼ Up u@p
(68)
where u@p is the continuous-fluid vorticity extrapolated to the
particle centroid. Maxey and Riley [132] proposed an equation of
point-force description for linear momentum particle dynamics,
known as the MaxeyRiley equation which is derived analytically
for the case of incompressible creeping flow around a single
spherical particle far away from other particles. The creeping flow
can be defined as
Rep 1;
rf djwj
where Rep ¼
mf
(69)
151
In the case of very light particles where rp rf , the terms
associated with rp (e.g. Fbody and dv=dt) can be neglected and thus
the point-force expression for very light particles becomes
ð70Þ
while rp rf and Rep 1. In the right-hand side of Eq. (70), the ‘‘D ’’
term represents the drag force, the ‘‘S ’’ term represents the stress
force, while the ‘‘H ’’ term represents the history force term
assuming negligible relative acceleration at t ¼ 0.
Following the same principle, for very heavy particles, the terms
associated with rf can be neglected and thus the point-force
expression in turn becomes
ð71Þ
Other point-force expressions have been reported in the literature by various researchers in order to take into account interface
conditions, non-spherical particles, rotation, deformability and
mass transport. Different flow aspects have also been studied such
as compressibility, turbulence, shear and strain. All these efforts are
mainly empirical or semi-empirical and are limited to specific flow
regimes and consequently are subjected to uncertainties and bias.
The non-uniqueness of multiphase flow equations because of
different modelling approaches indicate that there is not a standardized procedure (in a manner similar to single-phase flows) and
thus extra care must be taken since every flow needs its specific
equations and models to describe all the associated physics as
realistically as possible.
DNS studies of evaporating and non-evaporating droplet/particle
dispersion have been performed by various researchers in the past,
e.g. [114,133136]. Here, the EulerianLagrangian formulation for
evaporating droplet dispersion, as given by Miller and Bellan [136] is
presented. The gas phase is treated in an Eulerian manner while the
particle/droplet phase is treated in the Lagrangian manner, similar to
formulations found in Refs. [114,133,135]. The compressible gas
phase (carrier plus mixture) governing equations include the mass,
momentum and energy transfer between the gas and the dispersed
evaporating phase and are given as
vr
v ruj ¼ SI
þ
vt vxj
(72)
v
v
rui uj þ pdij sij ¼ SII;i
ðrui Þ þ
vt
vxj
(73)
"
#
v
v
vT
ðre þ pÞuj l
ui sij ¼ SIII
ðreÞ þ
vt
vxj
vxj
(74)
"
#
v
v
vYv
rYv uj rG
¼ SI
ðrYv Þ þ
vxj
vt
vxj
(75)
p ¼ r½Yv Rv þ ð1 Yv ÞRc T
(76)
where the subscripts c and v correspond to carrier gas and vapor
respectively. The other symbols in Eqs. (72)(76) are: ui gas-phase
152
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
velocity; e total gas energy; p thermodynamic pressure; Yv mass
fraction of evaporated vapor; Rc , Rv the carrier gas and vapor gas
constants; sij viscous stresses; m, l gas-phase viscosity and thermal
conductivity and G the Fickian diffusion coefficient. The terms SI ,
SII;i and SIII represent the coupling of mass, momentum and energy
respectively. The coupling mechanisms are an integral part of all
EulerianLagrangian formulations.
The Lagrangian governing equations which describe the droplet
transient position Xi , the velocity vi, the temperature Td and mass
md are given as
dXi
¼ vi
dt
dvi
F
¼ i;
dt
md
where Fi ¼ md
f1
sd
ðui vi Þ
Table 1
Major characteristics and properties of Eulerian/Lagrangian approaches [122,123].
Point-force
Resolved-surface
Lagrangian approaches are mainly
applied in situations where the flow
has insignificant liquid volume
fraction or the number of particles is
less (than those concerned in Eulerian
approaches). The methods are also
applied in cases where particlewall
and particleparticle interactions are
important
Two continuity
Particle surface
Particle volume
equations are solved for effect on the
interface is taken
the gas and liquid
continuous-fluid
into account
respectively
flow is neglected
Two sets of momentum Suitable for flows Suitable for flows
equations are needed
with many
involving
with gas and liquid
particles
complex particle
properties respectively
topologies
One continuity
equation
may be
solved
A single set of
momentum
equations is
needed
which
accompany
mixture
properties
One energy
Two energy equations
equation
are essential with gas
is solved
and liquid properties
respectively
(82)
where patm is the atmospheric pressure and TB;l is the liquid saturation temperature. The Lagrangian reference frame for the droplet
conservation Eqs. (72)(76), leads to the following coupling terms
(
X wa
)
_d a
m
ðDxÞ3
"
#
X wa _ d vi a
¼ Fi þ m
ðDxÞ3
a
(
"
# )
X wa
v2i
_
vi Fi þ Q þ md ð þ hv;s Þ
¼ 2
ðDxÞ3
a
a
a
SIII
where subscript d denotes individual droplet. The particle time
constant sd for Stokes flow is sd ¼ rl D2 =18mg where D is the
droplet diameter. cl is the liquid heat capacity and Lv the latent
heat of evaporation. The gas mixture heat capacity is
cp;g ¼ ð1 Yv Þcp;c þ Yv cp;v with cp;c and cp;v the constant pressure
heat capacities of the carrier gas and vapor respectively. The gasphase Prandtl and Schmidt numbers are defined as Prg ¼ mcp;g =l
and Scg ¼ m=ðrGÞ. A mass transfer number is utilized to drive the
evaporation rate and is defined as BM ¼ ðYs Yv Þ=ð1 Ys Þ with
the subscript s denoting droplet surface conditions. Nu and Sh are
the Nusselt and Sherwood numbers and f1 an empirical correction
to Stokes drag. The function f2 ¼ b=ðeb 1Þ is an analytical heat
_ d =md . The vapor surface
transfer correction with b ¼ 1:5Prg sd m
mass fraction Ys is calculated from the surface molar fraction
(cS p ¼ psat ) while the saturation pressure is calculated through
the ClausiusClapeyron relation and thus
Separated-fluid
!#
"
patm
Lv 1
1
exp
p
Rv TB;l Td
SII;i
(80)
Eulerian methods are usually applied
when continuous liquid phase
presents in the flow field or the
number of liquid particles Np is much
larger than the number of
continuous-phase grid cells Nf
such that Np [Nf . This condition
guarantees computational efficiency
cS ¼
(78)
dmd
1
Sh
_ d ¼ md
lnð1 þ BM Þ
¼ m
sd
3Scg
dt
Mixed-fluid
(81)
(77)
(79)
Lagrangian approaches
cs
cs þ ð1 cs ÞWc =Wv
SI ¼ _ d Lv
Nucp;g
dTd Q þ m
f
ðT Td Þ
; with Q ¼ md 2
¼
sd
dt
md cl
3Prg
Eulerian approaches
Ys ¼
(84)
(85)
The summations are over the individual droplet distributions with
_ d the droplet evaporation rate, Fi the drag force, Q the heat
m
transfer and hv;s the evaporated enthalpy at the droplet surface
defined as hv;s ¼ cp;v Td þ h0v . Greek a represents individual droplet
variables and ðDxÞ3 represents a local discretization volume. The
weighting factor wa is used to distribute the individual droplet
contributions to the eight nearest neighbor surrounding points.
Further details on the mathematical formulation and smoothing
parameters can be found in Ref. [136].
DNS-like simulations of atomization and spray processes are not
model-free. Different modelling approaches approximate the flow
physics in different manners. Table 1 summarizes the major characteristics and properties of Eulerian/Lagrangian approaches, in the
context of DNS. In RANS and LES approaches, the Eulerian/
Lagrangian issues are similar, but the grid points used are normally
too coarse to resolve the gasliquid interfaces. Apart from the
different degrees of modelling approximations used in RANS, LES
and DNS, their computational costs are vastly different. For general
computational combustion, Poinsot and Veynante [137] summarized the advantages and drawbacks of the three methodologies
and indicated the computational costs, as shown in Table 2. In
a practical simulation, computational costs depend on many factors
such as the complexity of the algorithm and the accuracy required.
It is often very difficult to directly compare the costs of the three
methodologies, mainly due to the different numerical methods
Table 2
Comparison between RANS, LES and DNS approaches for numerical combustion
[137].
Approach Advantages
RANS
-
-
LES
-
Drawbacks
‘‘Coarse’’ grid
Allows geometrical simplification such as 2D flows
and symmetry
Lower computational cost
compared to LES and DNS
-
Unsteady flow features
Reduced modelling impact
compared to RANS
-
-
-
-
DNS
Models for drag,
lift, etc. are
required
(83)
-
-
No models are needed for
turbulence
Powerful tool to study
models
-
-
Only the ‘‘mean’’ (ensembleor time-averaged) flow field
is resolved
Models are required
Models for turbulence are
needed
3D simulations are required
Precise numerical codes are
needed
Computational costs are high
The numerical costs are
prohibitive (fine grids, very
precise codes)
Limited
to
academic
problems
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
Table 3
The increase in computational costs when RANS/LES/DNS is applied to gasliquid
two-phase flows.
RANS/LES/DNS computational costs
Eulerian mixedfluid approach
Eulerian separatedfluid approach
Lagrangian
point-force
approach
Lagrangian
resolved-surface
approach
Relatively small
increase in
computational
costs compared
with singlephase
simulations
Typically the
computational cost
is doubled
compared to the
mixed-fluid
treatment
Computational
cost depends on
the number of
particles
considered
Requires higher
computing power
per particle in
respect to pointforce approach
employed. Although a specific case was mentioned in Section 3 for
comparison between RANS and LES [121] based on the same
numerical methods, it cannot be regarded as a generalization
because the cost is dependent on multiple parameters. Table 3
shows the expected changes in computational costs when
gasliquid two-phase flows are concerned.
4.2. Interface tracking and reconstruction techniques
The gasliquid interface needs to be tracked in order to identify
the location of the liquid phase when the Eulerian approach is used
for the liquid phase. This is a necessity when the multiphase DNS
approach is based on the one-fluid formalism [124] or the mixedfluid treatment. In the context of this approach, advanced interface
tracking algorithms [125] can be employed, as mentioned in the
previous subsection. The various methods for interface calculation
can be divided into two great classes, depending on the nature,
fixed or moving, of the grid used in the bulk of the phases. In fixedgrid methods, there is a predefined grid that does not move with
the interface (contrary to moving-grid methods) [138]. The fixedgrid methods are the most commonly used due to their relatively
simple description and greater ease of programming. The earliest
fixed-grid numerical technique designed to simulate complicated
free surface problems is the well-known marker-and-cell (MAC)
method [139]. The MAC method assumed a free surface so there
was only one fluid involved. This required boundary conditions to
be applied at this surface and the fluid in the rest of the domain to
be completely passive. Extensions to two-fluid problems were
performed at Los Alamos laboratory [140,141]. The next generation
of multi-fluid tracking methods evolved gradually from the MAC
method. Several volume advection techniques for finite-volume
and finite-difference methods have been developed with the aim of
maintaining very sharp interfaces [142]. The well-known ones also
include the simplified line interface calculation (SLIC) [143], the
volume of fluid (VOF) method [144] and the Young’s method [145].
4.2.1. VOF-type methods
The most commonly used surface tracking is perhaps the VOF
method. The major characteristic of the VOF method is the utilization of the volume fraction F (also known as the color function)
[138,142,146]. This requires computation of the fluid volume at each
cell which is then retained through the volume fraction. Mixed cells
will have a volume fraction F between zero and one and cells
without interfaces (pure cells) will have a volume fraction equal to
zero or unity. Fig. 6 shows a typical volume fraction distribution for
a random curve over a square grid. It is worth mentioning that the
VOF method was developed for incompressible flow. Adaptation of
the VOF method to accompany compressibility effects has been
carried out [127]. The volume fraction F is specified as
8
< 1;
F ¼ 0 < F < 1;
:
0;
pure liquid
gas-liquid interface
pure gas
153
(86)
Propagation of the indicator function (volume fraction) with the
associated fluid is achieved through the VOF advection equation
which is specified as
vF vðuFÞ vðvFÞ vðwFÞ
þ
þ
þ
¼ 0
vt
vx
vy
vz
(87)
The density and viscosity of the gasliquid two-phase flow are
considered as functions of the liquid volume fraction, and densities
and viscosities of both phases [112,147,148], given by
r ¼ Frl þ ð1 FÞrg
(88)
m ¼ Fml þ ð1 FÞmg
(89)
Eqs. (88) and (89) are utilized in conjunction with the VOF method,
to account for the contributions of the two individual phases to the
mixture properties. The mixture properties are accompanied in the
momentum equations, in a mixed-fluid treatment.
To allow for the gas compressibility to be considered, the
transport equation for liquid mass fraction Y is utilized [127130],
rather than the transport equation of volume fraction F, which is
applicable to incompressible flows only. The concept of
compressible gas-phase formulation involves transportation of
liquid mass fraction and follows the transportation of a passive
scalar. In 3D Cartesian coordinates the transport equation for liquid
mass fraction can be given as
vðrYÞ
vðruYÞ vðrvYÞ vðrwYÞ
1
v
vY
m
¼ þ
vt
vx
vy
vz
Re Sc vx vx
v
vY
v
vY
m
m
þ
þ
vy vy
vz vz
(90)
where Re and Sc are the Reynolds and Schmidt numbers respectively. Since the compressible VOF formulation requires the transportation of liquid mass fraction rather than the liquid volume
fraction, a relation between the two can be given as [127]
F ¼
rg Y
(91)
rl rl rg Y
VOF-type methods are very effective and widespread for several
reasons. Their simple implementation enables application to
Fig. 6. Typical volume fraction distribution over a random curve.
154
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
complex Eulerian flows, apart from Lagrangian formulations at
which a single particle is examined. The reasons which make VOFtype methods attractive are [138]
They preserve mass in a natural way as a direct consequence of
the development of an advection equation
The change of topology is implicit and thus no special provision
is necessary for interface reconnection or breakup
Simple extension from two-dimensional to three-dimensional
configurations
The VOF schemes are local in the sense that only the F values of
the neighboring cells are needed to update the F value in the
next cell
Although the SLIC, the VOF and the Young’s method have been
commonly used, other volume tracking algorithms have been
developed throughout the years, e.g. Chorin [149], Ashgriz and Poo
[150] and Pilliod and Puckett [151]. While the basic mechanism for
all VOF-type methods is the same (the use of an advection equation
to transport volume fraction), their major difference lies in how the
interface is reconstructed and consequently in the treatment of the
curvature and unit normal on the interface. The two major categories
of reconstruction are the piecewise-constant and the piecewiselinear methodologies. The piecewise-constant methodologies (e.g.
SLIC and VOF) assume that the interfaces within each cell are lines
(or planes in three dimensions) aligned with one of the logical mesh
coordinates. This simple interface geometry allows application of
the piecewise-constant methodologies to multi-material problems
[146]. The utilization of a multidimensional operator to calculate the
unit normal in the VOF method [144], compared to the use of an
operator split in the SLIC method [143], makes it the most attractive
interface tracking method to use. Further details regarding these
operators can be found in Ref. [146].
More accurate VOF methods have been developed through the
years which accurately reconstruct the interface and they fall into
the category of piecewise-linear methodologies, commonly known
as the VOF/PLIC (PLIC stands for piecewise-linear interface
construction/calculation) methods [138]. A VOF/PLIC method
consists of two major parts: (a) reconstruction step and (b) propagation step. A typical reconstruction is shown in Fig. 7 which
shows the volume fraction distribution from both VOF and VOF/
PLIC algorithms. The key part of the reconstruction step is the
determination of the line segment and thus the determination of
the unit normal n and volume fraction F which consequently define
the uniqueness of the line. A unit normal vector m can be calculated
from the finite-difference formula
mh ¼ Vh F
(92)
hF
In the estimation of the unit normal, the gradient V
is constructed from the volume fraction values of a 3 3 block of cells
centered at ði; jÞ. Another approach is the least-square method
where now the interface is approximated by a straight line in the
whole block with the constraint that the volume fraction of the
~ is
central cell is always a true value F. The error between F and F
minimized by changing the slope of the line. For instance, the error
E at cell ði; jÞ can be found by
2
EðmÞ ¼ 4
1
X
~
F
iþk;jþl ðmÞ
Fiþk;jþl
2
31=2
5
(93)
k;l ¼ 1
The second part of the reconstruction consists of finding a linear
interface that cuts computational cell into two parts which contain
the proper area of each fluid. This is achieved by derivation of an
expression which relates the ‘‘cut’’ area to a parameter a (where the
straight line is fully defined) [147]. Considering for simplicity two
dimensions, and assuming a square cell of side h in the ðx; yÞ plane
and a straight line CG (Fig. 8), the area below the line within the cell
must be calculated (area ABDFH in Fig. 8). The definition of
a straight line in Cartesian two-dimensional coordinates having
a normal m is given by
mx x þ my y ¼ a
(94)
where a is the linking parameter. The area of region ABDFH within
the square cell ði; jÞ can be given as
ð95Þ
In cases where the points C and G lie within the square, then this is
the desired area. Due to geometrical similarity between triangles
BCD and ACG the ratio of their individual areas is equal to the
square of the ratio of their sides and thus
ABCD
¼
AACG
2
a mx h
a
Fig. 7. Volume fraction distributions from VOF and VOF/PLIC algorithms: (a) VOF; (b) VOF/PLIC.
(96)
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
155
The Lagrangian advection allows accountability of stretching or
compression of the interface during each fractional step. The
procedure can be made second-order accurate by changing the
advection directions at each time step. First-order and secondorder algorithms have been developed by several researchers
[146,152154]. The major advantage of VOF/PLIC methods,
compared to the standard VOF method, is the elimination of the socalled flotsam and jetsam, which are small bodies separated from
the main material body because of errors induced by the VOF and
generally from all piecewise-constant methods [138,143].
Fig. 8. Geometrical basis for Eq. (95).
Eq. (95) contains the Heaviside step function Hða mx hÞ while the
third term in the square brackets subtracts the area of the triangle
HFG when a > my h and point G lies above point H. The area is
a continuous function of a and it ranges from zero, when a ¼ 0, to
h2 , when a reaches its maximum value of ðmx þ my Þ h.
In practical CFD one needs to utilize Eq. (95) while the VOF/
PLIC method also requires an ‘‘inverse’’ calculation which will
determine a that corresponds to a given cut area and normal
direction in a computational cell. There are a number of ways to
achieve this. One can use a standard root-finding method to find
the particular value of a at which the cut area has the desired
value. An alternative method is to use an iterative method as
described in Ref. [146]. Another option is to identify the two
critical values of a at which the interface passes through one of
the corners of the square. In between these two critical values the
function of the right-hand side of Eq. (95) is a known polynomial
in a whose roots can be analytically found [138]. There is no
standard ‘‘inverse’’ procedure in determining a and thus the
choice of method in doing so greatly depends on the specific
application.
The second step in the VOF/PLIC methodology is propagation.
After the interface has been reconstructed, its motion by the
underlying flow must be modelled by an advection algorithm,
which is a typical feature of VOF. One way to calculate the fluxes
along the x-direction is shown in Fig. 9, where the fluid to the right
of the dashed line crosses the right boundary at time s. The whole
block of fractional volume in a band of width us is transferred from
the upwind cell to the downwind cell. Using this method no
account is taken for the interface topology changes during the time
step [138]. Another method for propagation is to use the Lagrangian
approach where the interface segments are directly computed (as
shown in Fig. 10) [147]. In the Lagrangian propagation approach
three contributions are calculated: the area fluxes f and fþ
entering the cell ði; jÞ, from cells ði 1; jÞ and ði þ 1; jÞ, respectively,
and the area f0 of the fluid contained at the beginning of the time
step in the control cell that remains there. The volume fraction
along the x direction (and similarly for the other directions) can
be calculated by
h
0
þ
FðxÞ
¼ f
ij þ fij þ fij
ij
i
(97)
4.2.2. Level-set methods
Apart from the volume-of-fluid methods for tracking the interface dynamics, another major category of computing moving
surfaces in fluid problems are the level-set methods. These
methods were introduced by Osher and Sethian [155] and they are
based on implicit representation of the interface whose equation of
motion is numerically approximated using schemes built from
those for hyperbolic conservation laws. Level-set methods are very
useful for problems where the topology of the interface is in
multiple dimensions and with sharp corners and cusps. There are
many review articles and text on level-set methods and the reader
is referred to the work of Osher and Fedkiw [156] and Sethian
[157,158]. Herein the analysis on level-set methods is restricted to
two-phase incompressible flow problems. Other applications
include high-speed compressible flow and material science problems [159]. Here, the work of Sethian and Smereka [159] is closely
followed since it provides an explanation of level-set method for
applications closely related to atomization and spray processes.
For two immiscible fluids (gas and liquid phases respectively) at
low Mach numbers the equations of motion for each fluid can be
written as
l
rl Du
Dt ¼ Vpl þ 2ml V$Dl þ rl g;
V$ul ¼ 0
g
rg Du
Dt ¼ Vpg þ 2mg V$Dg þ rg g;
x˛liquid
(98)
x˛gas
(99)
V$ug ¼ 0
where u is the velocity, p the pressure, r the density and m the
viscosity. Subscripts l and g denote the liquid and gas phases
respectively, D is the rate of deformation tensor and g gravitational
acceleration. The boundary conditions at the interface G are
2ml D 2mg D $n ¼ pl pg þ sk n and ul ¼ ug ; x˛G;
(100)
where n is the unit normal on the interface, k ¼ V$n in the curvature of the interface, and s the surface tension coefficient. The
velocity, density and viscosity are defined as follows
Fig. 9. Schematic for the split computation of fluxes.
156
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
u ¼
ul
; r ¼
ug
rl
rg
and
m ¼
ml ; x˛liquid
mg ; x˛gas
(101)
Combining Eqs. (100) and (101) yields
rDu
Dt ¼ Vp þ V$ð2mDÞ skdðdÞn þ rg; x˛U;
V$u ¼ 0
(102)
where U is the domain containing both fluids and d is a delta
function that is zero everywhere except at the interface. At a point x
in the liquid, d is the distance closest to the point on the interface. In
the gas, d is the negative of this quantity.
Density-weighted divergence-free projection is essential in the
level-set formulation to enforce the incompressibility condition.
This is achieved by letting rðxÞ be a density function and f ðxÞ be an
arbitrary vector field defined in domain U. Then the weighted
divergence-free projection of f (denoted as u here) is given as
u ¼
1
r
Vp f
(103)
and u$n ¼ 0 on v U. Due to V$u ¼ 0 the pressure must satisfy the
following elliptic equation
1
V$ Vp ¼ V$f ;
r
where
vp
¼ f $n on vU
vn
(104)
The weighted projection is denoted by Pr and since
Pr ð1=r VqÞ ¼ 0, where q is any scalar field, pressure can be eliminated
from Eq. (102) by applying the divergence-free projection operator.
The level-set formulation requires the specification of a level-set
function (similar to color function in VOF methods). The level-set
function f is specified as zero at the gasliquid interface. Similar to
the VOF method the density and viscosity are constant in each fluid
and take two different values depending on the sign of the level-set
function f and hence one may write
rðfÞ ¼ rg þ rl rg HðfÞ
(105)
mðfÞ ¼ mg þ ml mg HðfÞ
where HðfÞ is the Heaviside function defined as
8
< 0
HðfÞ ¼
1=2
:
1
if f < 0
if f ¼ 0
if f > 0
gas
interface
liquid
(106)
Since the interface moves with the fluid particles, the evolution
of f follows a typical advection equation (like in the VOF method)
given by
topology present tremendous numerical difficulties. This fixed
thickness allows replacement of rðfÞ with a smoothed density
r3 ðfÞ, as defined in Eq. (105), but now the Heaviside function is
defined as
H3 ðfÞ ¼
(107)
The interface in level-set method has a fixed thickness
proportional to the mesh size since the sharp changes in
:
1
2
0
1þ
f 1
þ sinðpf=3Þ
3 p
1
if f < 3
if jfj 3
if f > 3
(108)
and the interface thickness is approximately 23=jVfj. The smoothed
Delta function is given by
dH3
df
d3 ðfÞ ¼
(109)
In turn, the smoothed NavierStokes momentum equation
becomes
Du
1
¼
½ Vp þ V$ð2m3 ðfÞDÞ skd3 ðfÞVf þ g
r3 ðfÞ
Dt
(110)
Like in any other CFD methodology there are numerical issues
associated with the solution of the governing equations. In the
level-set method, there are three main numerical issues when
computing the equations and these are: projection step, spatial
discretization and time discretization. The review paper of Sethian
and Smereka [159] can be a good starting point for further explanations on the numerical issues. Recently, Sussman and Puckett
[160] developed a coupled level-set/VOF method. This coupled
method seems to conserve mass almost as well as the VOF methods
without the presence of flotsam and jetsam. Also, the surface
tension effects are easier to incorporate and overall the coupled
level-set/VOF method appears to be very promising.
Immersed boundary (IB) methods fall into the third major
category of interface tracking. The term ‘‘immersed boundary’’ was
initially introduced to simulate cardiac mechanics and associated
blood flow. The characteristic of this method was that the simulation was based on Cartesian grid which did not conform the
geometry of the heart. Methods need to be formulated to impose
the effect of the immersed boundary on the flow. Unverdi and
Tryggvason [161] successfully implemented the IB method to
simulate multi-fluid flows. The mathematical formulation in
Ref. [161] consists of the incompressible, unsteady, and viscous
NavierStokes equations while the density and viscosity are
updated using Eq. (105). For the interface calculation an indicator
function is specified in two dimensions as
Iðx; yÞ ¼
vf
þ u$Vf ¼ 0
vt
8
< h
1 r$n
#
gðrÞds
2p r 2
(111)
The advantage of using a global indicator function is that all the
interacting interfaces are accounted for. Assuming that GðxÞ is the
gradient of the indicator function evaluated at grid point x and D is
a distribution function that determines what fraction of the interface quantity should go to each grid point, then
GðxÞ ¼
X
D x xðlÞ nðlÞ DsðlÞ
(112)
l
where nðlÞ is the unit normal vector to an interface element of area
DsðlÞ whose centroid is at xðlÞ . The indicator function is calculated
using a fast Poisson solver which solves
V2 I ¼ V$G
Fig. 10. Lagrangian propagation step.
(113)
This procedure yields a quantity IðxÞ which is constant in each
fluid but has a finite thickness transition zone around the interface
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
and therefore approximates a two-dimensional step function. The
distribution function as specified in Eq. (112) is defined as
ðlÞ
D xx
¼
ð4hÞ
a Qa
i¼1
h
ðlÞ
p x x
1 þ cos 2h
i
i
0
D
ðlÞ if xi xi 2h; i ¼ 1; a
otherwise
i
(114)
In Eq. (114) h is the grid spacing and a ¼ 2; 3 in two and three
dimensions respectively. The velocities of the interface points are
interpolated from the grid velocities using the same grid points that
the gradient was distributed to, with the same weight functions,
and therefore the velocity at the interface point l is given by
uðlÞ ¼
X
D xi xðlÞ ui
(115)
i
where the summation is over the grid points on the stationary grid
in the vicinity of the interface point. The advection of the interface
is then achieved by integrating the following
dxðlÞ
¼ uðlÞ
dt
(116)
The interface is advected with the flow and the interface itself is
formed by connecting the discrete points by straight lines in two
dimensions and by triangular elements in three dimensions.
4.3. Modelling surface tension
In a gasliquid two-phase flow there is a source of momentum
due to the presence of surface tension. This requires the addition of
a source term in the NavierStokes momentum equations
[112,138]. An integral as shown in the following describes this extra
momentum source term, but it cannot be solved directly since it
requires the exact shape and location of the interface
Z
sk0 n0 dðx x0 ÞdS
(117)
SðtÞ
In Eq. (117) s is the surface tension coefficient, k is the curvature of
the liquid surface, n is the unit vector normal to the liquid surface,
dðxÞ is the Dirac delta function and S is the liquid surface. The
problem of directly solving the momentum integral due to surface
tension can be alleviated by the use of a continuum surface force
(CSF) model developed by Brackbill et al. [162]. The CSF model
represents surface tension as a continuous volumetric force acting
in the region where the two phases coexist. This volumetric force is
given by
F ¼ skVF
(118)
where the curvature k is defined as
k ¼ V$
VF
jVFj
(119)
In CFD, the non-dimensional form of the governing equations
may be employed and thus the non-dimensional form of the
surface tension in the CSF model may be needed. Non-dimensional
analysis of the CSF model yields a term which can be directly used
in the NavierStokes momentum equations and accounts for the
contribution of surface tension [163], given by
F ¼
sk
VF
157
(120)
We
where We is the Weber number. Generalizing, the compressible,
time-dependent, non-dimensional NavierStokes momentum
equation in the x-direction, with the surface tension contribution
accounted for, can be given as (gravity terms are neglected for
simplicity)
v ruv sxy
vðruÞ v ru2 þ p sxx
þ
þ
vt
vx
vy
sk vF
vðruw sxz Þ
¼ 0
þ
We vx
vz
|fflfflfflfflfflffl{zfflfflfflfflfflffl}
(121)
Surface tension term
The same principle can be followed for the y- and z-directions in
a three-dimensional Cartesian configuration, while adjustment is
needed for idealized axisymmetric (cylindrical) and two-dimensional planar configurations, by performing the necessary coordinate transformations.
The utilization of the CSF technique to model surface tension
forces in multiphase CFD problems creates currents which are
unphysical, the so-called ‘‘parasitic currents’’ [164], especially in
cases where the flow is dominated by surface tension effects. These
currents are generated in fluid regions adjacent to an interface by
local variations in the CSF body force. Their magnitude increases
with increasing capillary strength, and may become so large, as to
affect correct prediction of the flow field velocities and in extreme
cases may cause complete breakup of the interface. Harvie et al.
[164] performed an analysis of the parasitic currents generation
and found that the parasitic currents can be limited by the inertial
and viscous terms in the NavierStokes equations.
4.4. High-order numerical schemes for DNS of atomization
and sprays
DNS has to be a time-dependent simulation due to the unsteady
nature of turbulence. Unsteady simulations have a fourth dimension
(time) which needs to be discretized. RungeKutta (RK) methods
are the most widely used integration procedures in DNS. Timeintegration methods that are second order are generally considered
as inadequate for DNS computations. Details of the RungeKutta
scheme can be found in the literature [165]. Generally speaking, the
number of stages in the RungeKutta scheme is larger than the
order of accuracy if the order of accuracy is higher than four and
thus the computation becomes very intensive. Williamson [165]
developed low-storage RungeKutta schemes which require only
two storage locations. A third-order three-step compact-storage
RungeKutta scheme derived by Wray [166] is shown here, in
which two storage locations are employed for each time-dependent
variable at each sub-step at the locations Q1 and Q2 with Q representing the solution variables. The solution variables are updated
simultaneously as follows
old
Q1new ¼ a1 RðQ Þold
1 Dt þ Q2
old
new
Q2
¼ a2 RðQ Þ1 Dt þ Q2old
(122)
where the constants ða1 ; a2 Þ are chosen to be ð2=3; 1=4Þ for substep 1, ð5=12; 3=20Þ for sub-step 2 and ð3=5; 3=5Þ for sub-step 3. At
the beginning of each full time step, Q1 and Q2 are equal. The data in
Q1 is used to compute the vU=vt terms in the governing equations.
The computed vU=vt terms are stored in Q1 to save storage by
overwriting the old Q1 . Eq. (122) is then used to update Q1 and Q2 .
In Eq. (122), Dt is the time step and is limited by the
158
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
CourantFriedrichsLewy (CFL) stability criterion. In DNS the
time-integration schemes are usually third- or fourth-order accurate while RungeKutta schemes with fifth-order accuracy or
above are rarely used since their formulation is very complex. A
good compromise is the use of fourth-order RK schemes since they
provide good accuracy, stability and computational efficiency [167].
Implicit RK methods are not preferred in DNS due to their complex
implementation. For incompressible flows, RK schemes are not
preferred, since the governing equations involve solution of an
elliptical Poisson equation at each time step and this increases the
overall computational cost. In those cases, the Adams-Moulton and
Adams-Bashforth methods are frequently used [167].
The Adams-Moulton methods are similar to the Adams-Bashforth
methods but they are based on implicit formulations. First-, secondand third-order schemes are available but the stability region
continues to shrink as the order of accuracy increases. In practical
CFD, predictor-corrector methods are used instead of pure implicit
methods (Adams-Moulton). The predictor-corrector methods
explicitly ‘‘predict’’ the time advanced solution which is substituted
into the implicit difference formula in the ‘‘corrector’’ step. This
results in an improved stability region over the purely implicit
Adams-Moulton scheme. The Adams-Moulton scheme can be used in
tandem with the Adams-Bashforth scheme as a predictor-corrector
pair. Details on the mathematical formulation on both the AdamsBashforth, Adams-Moulton methods can be found in Ref. [167].
Incompressible spray modelling, as mentioned before, lacks an
independent equation for the calculation of pressure and thus the
continuity equation cannot be used directly. The fractional step
method solves the governing equations for incompressible flows
very effectively. An intermediate velocity field is found which does
not satisfy continuity and then by using this velocity field an
equation for a virtual scalar quantity is found which is related to the
pressure. From this scalar the final velocity field and pressure can
be calculated. Details on the fractional step method can be found in
Ref. [168]. The fractional step method belongs to the general category of projection methods.
For DNS applications, like in cases of atomization and spray
modelling, high-order schemes are needed for spatial discretization. Most of the existing DNS codes employ high-order finitedifference schemes due to the fact that their computing costs are
generally lower than high-order finite-volume methods [169]. The
most common finite-difference schemes are the non-dissipative
central differencing ones, where the fourth-order scheme has been
broadly adopted as the numerical scheme with the lowest
acceptable accuracy for DNS computations. Unlike the upwind
schemes, the central-difference schemes do not introduce any
artificial dissipation. The artificial smoothing/dissipation makes the
upwind schemes inappropriate for long time integration such as
that encountered in DNS. Lele [170] perhaps made the first attempt
in utilizing high-order, narrow stencil, central finite-difference
schemes (Padè) in fluid flow problems involving a broad range of
scales. Atomization and spray processes intrinsically involve
a broad range of scales. The Padè scheme allows simplicity in the
boundary conditions treatment while the computing costs are
relatively low. Many variations of the Padè scheme, with different
degrees of accuracy, were presented by Lele [170]. Sixth-order and
fourth-order compact Padè schemes have been considered as good
compromises between accuracy and computational speeds for DNS
applications and they are briefly summarized as follows. The firstorder derivatives can be calculated using a five-point stencil of the
form
0
0
fj1
þ afj0 þ fjþ1
¼ b
fjþ1 fj1
fjþ2 fj2
þc
2h
4h
(123)
where the coefficients b and c can be calculated from a using
b ¼ ð2 þ 4aÞ=3 and c ¼ ð4 aÞ=3 with a ¼ 4 leading to a fourthorder scheme and a ¼ 3 leading to a sixth-order scheme. Similarly,
the second-order derivatives can be calculated from
00
00
fj1
þ afj00 þ fjþ1
¼ b
fjþ1 2fj þ fj1
h2
þc
fjþ2 2fj þ fj2
4h2
(124)
where b ¼ ð4a 4Þ=3 and c ¼ ð10 aÞ=3 with a ¼ 10 leading to
a fourth-order scheme and a ¼ 5:5 leading to a sixth-order scheme.
A more general family of high-order finite-difference schemes
with good spectral resolution was presented by Mahesh [171]. The
schemes proposed by Mahesh [171] differ from the standard compact
schemes in that the first and second derivatives are calculated
simultaneously. In addition, for the same stencil width, the schemes
by Mahesh [171] are two orders higher in accuracy with significantly
better spectral representation. The computational cost is in essence
the same as the standard compact schemes. The schemes that
compute simultaneously the first and second derivatives of a function f for a uniform mesh with grid spacing h are given by
0
0
00
00
a1 fj1
þ a0 fj0 þ a2 fjþ1
þ h b1 fj1
þ b0 fj00 þ b2 fjþ1
¼
1
c f
þ c2 fj1 þ c0 fj þ c3 fjþ1 þ c4 fjþ2
h 1 j2
(125)
By using a0 ¼ 1 and b0 ¼ 1 a sixth- and eight-order accuracy
can be accomplished for the evaluation of first and second-order
derivatives. The first and second derivatives are computed in
a coupled fashion using a narrower stencil compared to the scheme
of Lele [170].
Many finite-difference schemes are considered to be nonconservative. Fully conservative finite-difference schemes have
been proposed, but are limited in applications. They were initially
developed for incompressible, inviscid flows [172,173]. For incompressible flows, it is crucial that the kinetic energy is conserved, if
a stable and dissipation-free numerical method is sought. The
kinetic energy conservation yields to stability and minimizes the
artificial damping in LES/DNS computations [174]. Very recently,
Desjardins et al. [175] developed high-order conservative finitedifference schemes for variable density low Mach number flows,
based on the initial work of Morinishi et al. [173], which was
extended to simulate variable density flows in complex geometries
with cylindrical or Cartesian non-uniform meshes. Although these
conservative methods have not been widely applied to atomization/
spray two-phase flow simulations, they appear to be promising.
A drawback of the conservative finite-difference methods is the high
computational cost associated with their implementation [175].
Spectral methods offer an alternative way of calculating the
spatial derivatives in the governing equations with simple
boundary conditions such as periodic boundaries. Although there is
generally a lack of flexibility in spectral methods, compared to the
finite-difference schemes, they are numerically accurate with low
computational costs. Spectral methods are not easy to apply for
practical boundaries and compressible flows with discontinuities.
The utilization of spectral methods in DNS of atomization and spray
processes is a difficult task and thus the use of a central finitedifference scheme appears to be the option for spatial discretization. Finite-volume methods can be used in cases of complex
unstructured meshes and they are advantageous over the finitedifference methods since they are based on the integral form of the
conservation laws. This enables enforcement of the flux conservation even on arbitrary meshes since the fluxes collapse telescopically by construction. The main disadvantage of finite-volume
methods is their relatively high computing cost compared to finite-
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
difference methodologies, especially for achieving high-order
accuracy. The work of Ekaterinaris [169] gives a procedure for the
solution of multidimensional problems with the finite-volume
method. Spectral-volume method [176] can be considered as
a combination of the finite-volume and spectral methods. It is
a high-order, conservative and computationally efficient scheme
which enables accuracy similar to spectral method while it retains
the benefits of finite-volume method, enabling treatment of
irregular meshes and complex geometries. The spectral-volume
method is based on reconstruction of a high-order approximation
which yields from cell-averaged data from triangular of tetrahedral
finite-volumes, while Riemann solvers are utilized to compute the
fluxes at the volume boundaries. The spectral-volume method
could improve the accuracy of DNS significantly since many
atomization applications consist of flows inside combustors which
are usually very complex in geometry. A systematic comparison of
the method, at different orders of accuracy, with compact finitedifference schemes, would give better insights on the computational efficiency and accuracy of the method.
A combination of the generality of the finite-element method
with the accuracy of spectral techniques was proposed by Patera
[177], which is the commonly known, spectral-element method. In
the spectral-element method, the computational domain is divided
into a series of elements, and the velocity in each element is represented as Lagrangian interpolant through Chebyshev collocation
points. It is worth to point out that the spectral-element method is
not conservative compared to the spectral-volume method [176].
A two-fluid spectral-element method for two-phase flows, which
uses arbitrary Lagrangian-Eulerian mesh, was presented by
Helenbrook [178]. The two-fluid method can be applied to problems with complex geometries like in combustors and atomizers.
The difficulty/limitation of the method is that although it can be
applied to an unstructured mesh, as the interface evolves, the mesh
will eventually have to be restructured to avoid extremely high
aspect ratio elements.
5. Other relevant issues of modelling and simulation of
atomization and sprays
Physical modelling and simulation of spray flow and
combustion is a complex subject that involves many interacting
sub-processes. In principle, sprays can be modelled and simulated statistically in the Lagrangian treatment of the liquid phase,
while liquid breakup and atomization can be best modelled and
simulated using the Eulerian approach. However, modelling of
liquid-fuel atomization and spray combustion involves heavily
empiricism due to the complexity of the problem. The modelling
of sprays in simple flow configurations has been generally
successful, but it is difficult in complex spray configurations that
are mostly encountered in practical applications. Among the
various sub-processes, modelling the liquid atomization is mainly
based on simplified theoretical assumptions and empirical data.
Effective modelling of dense sprays has been very difficult due to
the complex droplet/liquid and liquid/liquid interactions.
Recently, progresses have been made on modelling sprays in
complex systems and dense sprays. Other interesting topics that
are related to atomization and spray processes include modelling
nozzle internal flows, hollow-cone sprays and EHD atomization.
So far, the discussions on liquid-fuel atomization and spray flow
and combustion have been limited to CFD approaches, including
the RANS approach and more advanced LES and DNS. However,
the modelling and simulation techniques for atomization and
sprays can go beyond the traditional concept of CFD. Multiscale
modelling provides such an addition. All these topics are briefly
reviewed in the following subsections.
159
5.1. Modelling nozzle internal flow, hollow-cone sprays, dense
sprays, and electrohydrodynamic (EHD) atomization
It has been understood that the influence of nozzle internal flow
effects on liquid atomization and spray combustion is significant
[16]. However, in the ‘‘wave’’ breakup model [39], the influence of
the inner nozzle flow on atomization of high-speed jets cannot be
predicted. The entire breakup analysis is based on aerodynamic
interactions between the liquid and gas phases, and modified initial
conditions that may be caused by different nozzle designs can only
be included by adjusting empirical constants to experimentally
obtained data. However, comprehensive studies on this subject
show that effects of the inner nozzle flow such as liquid-phase
turbulence and cavitation do have an influence on primary spray
breakup for modern high-pressure diesel injectors [179].
Recently, the influence of nozzle internal flow effects has been
included empirically in current wave stability theories [37]. Liquid
breakup models have been proposed in the literature that account
for various effects of the inner nozzle flow on primary spray
disintegration [37], where the turbulence and cavitation based
primary breakup model has been combined with the KelvinHelmholtz model for the secondary breakup. The turbulence
and cavitation based primary breakup model starts out from the
observation that during the quasi-steady injection phase with full
needle lift there is an almost stationary distribution of cavitation
and liquid regions. Thus, the flow at the nozzle orifice is divided
into two zones: the liquid core of the jet that is characterized by
a high momentum, and a zone of mixture of liquid ligaments and
cavitation bubbles with a significantly lower momentum. This
primary breakup model also incorporates the effects of inner nozzle
flow turbulence based on turbulent kinetic energy and its dissipation. The detailed formulation of the model can be found in the
literature [37]. In numerical simulations of high-pressure fuel
injection and spray formation, the model incorporating cavitation
effects should give more accurate predictions than using the standard ‘‘wave’’ breakup model alone.
Another example of modelling sprays in complex systems is the
sheet-atomization model for hollow-core sprays [37]. In directinjection spark ignition engines, pressure-swirl atomizers are often
utilized to establish hollow-cone sprays. These sprays are typically
characterized by high atomization efficiencies, i.e. by small droplet
diameters and effective fuelair mixing that can be realized with
only moderate injection pressures. Due to tangentially arranged
inflow ports, the fuel is set into a rotational motion within the
injector to establish hollow-core sprays. The resulting centrifugal
forces lead to the formation of a liquid film near the injector walls,
surrounding an air core at the centre of the injector. Outside the
injector nozzle the tangential velocity component of the fuel is
transformed into a mostly radial component such that a cone
shaped sheet results. This sheet thins as it departs further from the
nozzle and moreover, it is subject to aerodynamic instabilities that
cause breakup into ligaments that can quickly breakup further into
droplets. This process is driven by aerodynamically induced instabilities on the ligament surfaces, such that hollow-core spray
atomization can be described by a ‘‘wave-like’’ atomization model.
Meyer and Weihs [180] conducted a study on the effect of the
inner to outer radius ratio of annular sheets, i.e. the relative sheet
thickness compared to the curvature of the annulus, on the governing breakup mechanisms of such annular liquid sheets. They
concluded that there is a critical sheet thickness, defined in terms of
the surface tension, the gas density and the injection velocity as
tcrit ¼ s=ðrg U 2 Þ. For a thickness greater than tcrit , the jet behaves
like a solid cone diesel type jet. For a smaller thickness the annular
jet may be treated as a thin planar (two-dimensional) sheet. In
many numerical studies on gasoline direct-injection engines
160
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
utilizing pressure-swirl atomizers, e.g. [181], the primary spray
breakup is modelled with the so-called linearized instability sheetatomization model, which follows the above considerations and
was presented in detail by Senecal et al. [182]. The mathematical
formulation of the primary breakup, i.e. the disintegration of the
liquid sheet into ligaments and the first generation of droplets, can
be found in the literature [37,180182].
Dense sprays are difficult to model due to several reasons.
Firstly, particle interactions such as droplet collisions are most
likely in the dense spray regime close to the injector nozzle,
therefore the requirement on accuracy of the empirically based
physical modelling in this regime is high. Secondly, the statistical
convergence in the Lagrangian treatment of the liquid phase is
difficult to achieve [37], therefore the simulation results could
depend strongly on the grid distribution in this regime. The issue of
statistical convergence is associated with the stochastic particle
technique of the liquid phase. In order to achieve such statistical
convergence, it is not even sufficient to increase the number of grid
cells resolving the region near the nozzle orifice, but in addition the
ratio of stochastic particles (i.e. spray parcels) to grid cells needs to
be increased dramatically as well. This implicates an enormous
number of particles and in typical engine spray simulations one is
far from meeting such conditions. Furthermore, to have at least
a chance of coming close to statistical convergence, the various submodels included in the spray calculations need to be formulated in
a numerically favorable manner. As an example, sub-models that
are based on interactions of two different particles, e.g. droplet
collision models, are generally critical for statistical convergence,
even if they are formulated in a physically correct way [183].
There are recent progresses on modelling of dense sprays near
the jet nozzle within the RANS modelling framework, using the
Eulerian approach for the liquid phase [184186]. In this approach,
the stochastic Lagrangian simulation of the liquid droplets that
employs classical atomization models is only used for the dilute
regime of the spray rather than the dense spray regime near the
nozzle. This approach significantly reduces the modelling uncertainty in the dense spray regime and the prohibitively grid- and
particle-requirements to achieve statistical convergence. Especially,
one-dimensional Eulerian approach has been adopted to simulate
the dense spray regime [184186], which can further reduce the
computational cost. In a recent modelling of the primary breakup of
high-speed jets, Yi and Reitz [186] calculate the jet breakup characteristics by tracking the wave growth on the surface of each liquid
blob using a one-dimensional Eulerian approach. The breakup
model has been used to predict drop size, jet breakup length, and
spray liquid penetration length. Comparisons with experimental
data indicate that the new breakup model significantly improves
spray predictions over standard atomization models that are based
on linear jet stability theories. In an earlier effort by Wan and Peters
[184], a so-called interactive cross-sectional averaged spray model
for high-pressure diesel injectors was proposed, where an Eulerian
description for both the gas and the liquid phases was adopted in
the dense spray region near the jet nozzle. In this Eulerian
approach, a secondary numerical grid is superimposed on the
regular grid downstream of the nozzle orifice. On the secondary
grid, the liquid and gas-phase conservation equations are solved in
a cross-sectionally integrated and averaged manner. Thus, the spray
model becomes essentially one-dimensional within this domain,
and numerically very efficient. This advantage along with the
Eulerian formulation allows for a sufficiently high grid resolution
while still maintaining acceptable calculation times. Numerical
instabilities are avoided and statistical convergence is per definition not an issue in this Eulerian approach.
The 1D description of the spray region has a disadvantage, in
that the effect of multidimensional flow patterns such as swirl or
tumble on the mixture formation can hardly be accounted for.
Therefore, the method is applied only in the direct vicinity of the
injector, where the jet itself is the dominant force for mixture
formation rather than the ambient gas field. Downstream of the
injector, the 1D Eulerian model for dense spray is switched off and
the calculation is continued with the conventional Eulerian/
Lagrangian discrete droplet model. The 1D Eulerian approach to
dense spray can be useful for dense spray simulations, but cautions
must be taken in assuming the primary spray structure that is an
unknown a priori in numerical simulations of sprays. For the
simulation and modelling of liquid breakup and dense sprays, high
fidelity DNS would be the most appropriate method that could lead
to better understanding of the complex physical phenomena.
Different from the applications of atomization and sprays in gasturbine or engine combustion, EHD atomization has important
applications in bio- and nano-technology, which is a relatively lowspeed spray jet flow driven by electromagnetic forces. Numerical
modelling and simulation provide a unique capability to describe
the liquid cone formation and EHD atomization [187,188]. The
coupled EHD and electrostatic equations can be solved simultaneously. From the electrostatic field, the electric body forces [189]
can be determined and included in the NavierStokes equations.
The details of the multiphase flow can then be obtained by solving
the flow field governing equations.
5.2. Multiscale modelling of atomization and sprays
It is not an exaggeration to say that almost all practical problems
have multiple scales. Even though multiscale problems have long
been studied in mathematics, the current rapid development and the
formation of a special research field of multiscale modelling and
simulation are driven primarily by the use of mathematical models in
engineering and physical sciences, particularly in material science
such as polymers, chemistry, fluid dynamics, and biology. Problems
in these areas are often multiphysics in nature; namely, the processes
at different scales are governed by physical laws of different characters. For example, quantum mechanics at one scale and classical
mechanics at another. Multiscale modelling and computation is
a rapidly evolving research field that has a fundamental impact on
computational science and applied mathematics and influences the
relation between mathematics and engineering and physical
sciences. Emerging from this research field is a need for new mathematics and new ways of interacting with mathematics for engineering and physical sciences. Fields such as mathematical physics
and stochastic processes, which have so far remained in the background as far as modelling and computation is concerned, are moving
to the frontier. There are several reasons for the rapid development of
this research field. Firstly, modelling at the level of a single scale, such
as molecular dynamics or continuum theory, is becoming relatively
mature. Secondly, the available computational capability has reached
the stage where serious multiscale problems can be contemplated.
Thirdly, there is an urgent need from many other subjects of science
and technology. For instance, nanoscience is a good example for the
application of multiscale modelling techniques. In a multiscale
problem, different physical laws may be required to describe the
system at different scales. Take the example of fluids. At the macroscale such as meters or millimetres, fluids are accurately described by
the density, velocity, and temperature fields, which obey the
continuum NavierStokes equations. On the scale of the mean free
path, it is necessary to use kinetic theory based on Boltzmann’s
equation. At the nanometre scale, molecular dynamics in the form of
Newton’s law has to be used to give the actual position and velocity of
each individual atom that makes up the fluid. Multiscale modelling
and simulation has its own special methods, such as the heterogeneous multiscale method was presented as a general methodology
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
for an efficient numerical computation of problems with multiple
scales by Weinan et al. [190]. For a fluid, moving from atomic level to
macroscopic level, the theories for modelling and computation
change from quantum mechanics described by Schrödinger equation,
the molecular dynamics described by Newton’s equation, then the
kinetic theory described by Boltzmann’s equation, followed by the
continuum theory describe by NavierStokes equations, which are
the equations RANS, LES and DNS are based upon.
Traditional approaches have proven to be inadequate for many
problems, even with the largest supercomputers, because of the
range of scales and the prohibitively large number of variables
involved. Thus, there is a growing need to develop systematic
modelling and simulation approaches for multiscale problems. For
multiscale problems, modelling and analysis across scales and
multiscale algorithms are the key elements. In a multiscale problem,
the boundaries between different levels of theories may vary,
depending on the system being studied, but the overall trend is that
a more detailed theory has to be used at each finer scale, giving rise
to more detailed information on the system. There is a long history
in mathematics for the study of multiscale problems. Fourier analysis has long been used as a way of representing functions according
to their components at different scales. More recently, this multiscale multi-resolution representation has been made much more
efficient through wavelets. Another example of multiscale methods
is the proper orthogonal decomposition technique, as described in
Ref. [191]. On the computational side, several important classes of
numerical methods have been developed which address explicitly
the multiscale nature of the solutions. As Weinan and Engquist [192]
summarized, these include multigrid methods, domain decomposition methods, fast multi-pole methods, adaptive mesh refinement
techniques, and multi-resolution methods using wavelets. All these
methods can be used in CFD. From a modern perspective, the
computational techniques described above are aimed at efficient
representation or solution of the fine-scale problem. For many
practical problems, full representation or solution of the fine-scale
problem is simply impossible for the foreseeable future because of
the overwhelming costs. Therefore alternative approaches that are
more efficient need to be adopted. A classical approach is to derive
effective models at the scale of interest. An example of such
a technique is RANS and LES modelling approaches. Certainly the
concept of multiscale modelling and simulation is relevant to CFD,
including RANS, LES and DNS.
The modelling elements in RANS and LES are obvious. Although
DNS is intended as model-free, it is not possible to achieve such
state in complex physics flows such as reacting flows and multiphase flows. In reacting flows, the chemistry of the combustion
needs to be modelled so that it can be incorporated into the solver
of the fluid flow at an affordable cost. For multiphase flows, the
interaction between the different phases needs to be modelled and
mathematical models are also needed to track the interface
between different phases. Atomization and spray flows are a typical
multiscale phenomenon needing modelling efforts. An example of
turbulent atomization is presented next to illustrate the application
of multiscale modelling to fluid flow problems.
In most practical spray applications, the liquid jet flow originated
from an atomizer rapidly disintegrates into ligaments and further
into droplets downstream. The recent work by Desjardins et al. [193]
represents an example of complex atomization flow modelling and
simulation, where a gasliquid two-phase flow system is investigated focusing on the liquid atomization in a turbulent flow environment. This process of liquid jet breakup and atomization normally
occurs near the nozzle orifice, and the flow develops into sprays at
further downstream locations. The liquid disintegration is caused
either by intrinsic (e.g. potential) or extrinsic (e.g. kinetic) energy and
the liquid is atomized either due to the kinetic energy contained in
161
the liquid itself, by the interaction of the liquid sheet or jet with
a (high-velocity) gas, or by means of mechanical energy delivered
externally, e.g. by rotating devices. Although liquid breakup and
atomization process is an essential stage in the development of spray
flows, it is not fully understood particularly for high-speed jets. For
the multiscale gasliquid two-phase flow problem investigated by
Desjardins et al. [193], the modelling issues include the representation of the surface tension term as well as the density and viscosity
jumps on the interface, while the challenging numerical issues
including the accurate capturing of the gasliquid interface.
Desjardins et al. [193] presented a method for simulating
incompressible two-phase flows by improving the conservative
level-set technique introduced by Olsson and Kreiss [194]. The
method was then applied to simulate turbulent atomization of
a liquid diesel jet at Re ¼ 3000. The turbulent atomization problem
investigated is physically very complex, involving momentum
transfer between the two phases where the fine liquid droplets can
be smaller than the grid size and the large scales include the liquid
jet penetration and spreading. In the gasliquid two-phase flow,
surface instabilities, ligament formation, ligament stretching and
fragmentation, and droplet coalescence, all interact with turbulence to transform large-scale coherent liquid structures into small
scale droplets. There are several severe difficulties to numerically
investigate such a complex physics problem.
The first difficulty is the large change in the material properties
of the two phases, such as the density and viscosity are significantly
different in the two phases. In a diesel fuel injection, the liquid-togas density ratio can be as high as 40 while the viscosity ratio can be
of the order of 30, which can move up to several hundreds for
aircraft engines. This large change in fluid properties corresponds
to sharp gradients in the flow field, leading to severe numerical
difficulties. In addition, the surface tension force on the gasliquid
interface needs to be mathematically and numerically represented,
which also requires accurate localisation and transport of the
interface. Moreover, in the case of incompressible flows, the
interface transport and localisation should ensure that the volume
of each phase is exactly conserved. As a multiscale problem, there is
also a challenge coming from the small scales that the atomization
process produces. In a numerical simulation, the solver normally
generates liquid structures at the limit of numerical resolution. The
formation of small liquid structures requires high numerical resolution to tackle.
For the modelling of gasliquid two-phase flows, the VOF
method has been broadly used, but the gasliquid interface needs
to be reconstructed from the VOF results and the exact location of
the interface is unknown without this reconstruction [138]. The
front-tracking approach was introduced by Unverdi and Tryggvason
[161], which consists of discretizing the interface using an
unstructured moving mesh that is transported in a Lagrangian
fashion. However, the method requires frequent mesh rearrangements that affect the conservation of the liquid volume. The main
limitation of this approach is the lack of automatic topology modification. Moreover, the parallelization of such a method for
massively parallel computation is very challenging. Over the last
several years, the level-set method aiming at representing the
interface implicitly by an iso-level of a smooth function, as described
by Osher and Fedkiw [156], has drawn many attentions in the field
of interface modelling. Simple Eulerian scalar transport schemes
can be used to transport this smooth function, and therefore highly
accurate methods are available. Furthermore, the smoothness of the
level-set function makes the interface normals and curvature
readily available for the surface tension calculation, while parallelization is straightforward and highly efficient. However, level-set
methods are typically plagued by mass conservation issues since no
inherent conservation property of the level-set function exists.
162
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
In an effort to reduce mass conservation errors while retaining
the simplicity of the original method, Olsson and Kreiss [194] and
Olsson et al. [165] proposed a simple modification to the level-set
method. By replacing the usual signed distance function of the
classical level-set approach by a hyperbolic tangent profile that is
transported and re-initialized using conservative equations, Olsson
and Kreiss [194] showed that the mass conservation errors could be
reduced by an order of magnitude in comparison with the results
obtained with a signed distance function. Based on the work by
Olsson and Kreiss [194] and Olsson et al. [195], Desjardins et al.
[193] made a few modifications to the level-set method and presented the accurate conservative level-set (ACLS) method, resulting
in both improved accuracy and robustness.
Numerical simulations of liquid jet/sheet breakup and atomization in a gaseous atmosphere is very scarce so far, mainly due to the
complex spatially developing nature of the flow and the fact that
often high density ratios and capillary forces lead to serious
numerical problems [196]. The surface tension force in the
gasliquid two-phase flow system needs to be modelled accurately.
A commonly used approach is the continuum surface force model
developed by Brackbill et al. [162]. However, the CSF model spreads
out both the density jump and the surface tension force over a few
cells surrounding the interface in order to facilitate the numerical
discretization. Consequently, this approach tends to misrepresent
the smallest front structures. For the handling of the large density
ratio and the surface tension force in a multiphase flow solver, the
ghost fluid method (GFM) as described by Fedkiw et al. [197]
provides a very attractive way in the context of finite differences, by
using generalized Taylor series expansions that directly include these
discontinuities. Since GFM explicitly deals with the density jump, the
resulting discretization is not affected. Similarly, the surface tension
force can be included directly in the form of a pressure jump,
providing an adequate sharp numerical treatment of this singular
term. Accordingly Desjardins et al. [193] used GFM for the surface
tension term as well as for the density jump. However, the CSF model
was still used for the discretization of the viscous terms due to the
complexity involved in using GFM for the viscous term. Their argument was that the viscous contribution is small in comparison with
the convective terms in a turbulent flow, which is valid for highspeed flows involved in liquid atomization.
The level-set approach is at the centre of the gasliquid interface
modelling by Desjardins et al. [193]. In the simulations of the
turbulent atomization performed, the ACLS method provides the
details of the gasliquid interface, where the material properties
including density and viscosity are subject to a jump, while the
velocity is continuous across the interface. The important change
across the interface occurs due to the variable pressure, which
includes the surface tension term. In the solver, the ACLS procedure
is coupled with the incompressible NavierStokes equations for the
two-phase fluid flow. Their numerical results showed that the
interface displays a complex, turbulent behaviour, as the liquid jet
undergoes turbulent atomization. Fig. 11 shows the instantaneous
snapshots of the gasliquid interface at different times. In the
atomization, many complex phenomena interact, leading to a fast
breakup of the liquid core into ligaments and sheets, then droplets.
In the results reported [193], the liquid core has fully disintegrated
by the end of the computational domain. The fully developed nature
of the turbulent atomization appeared clearly in the results, along
with the chaotic nature of the interface. The flow appeared to be
vortical with complex fine scales. The results indicated that the
numerical algorithm is robust for such a complex, turbulent, threedimensional, multiphase and multiscale flow problem.
There are also many other recent efforts on modelling atomization and sprays. Massot [198] proposed an Eulerian multi-fluid
model for polydisperse evaporating sprays. The purpose of such
Fig. 11. Turbulent atomization of a liquid diesel jet, from Desjardins et al. [193].
a model was to obtain a Eulerian-type description with three main
criteria: to take into account accurately the polydispersity of the
spray as well as size-conditioned dynamics and evaporation; to keep
a rigorous link with the spray equation, Eq. (1), at the kinetic, also
called mesoscopic, level of description, where elementary
phenomena such as coalescence can be described properly; to have
an extension to take into account non-resolved but modelled fluctuating quantities in turbulent flows. Models as such are potentially
suitable for multiscale flow problems. There has been a variety of
spray models. For example, Beck and Watkins [199] developed
a model able to capture the full polydisperse nature of the spray
flow without using dropletsize classes. Instead, the moments of
the droplet-size distribution function were used to describe the
distribution of droplet sizes. Transport equations were written for
four moments: the liquid mass and surface area, and the total radius
and droplet number. All the equations were solved in an Eulerian
framework using the finite-volume approach. The inter-phase heat
and mass transfers were captured through the use of source terms.
The model was successfully applied to a wide variety of different
sprays, including high-pressure diesel sprays, wide-angle solid cone
water sprays, hollow-cone sprays and evaporating sprays.
Finally, it is worth mentioning that boundary conditions are
important ingredients of the physical modelling and especially
important for CFD. Boundary conditions for LES and DNS are
significantly more complex than those for RANS. Detailed
information on boundary conditions can be found in Ref. [191].
For atomization and spray simulations, the atomizer nozzle flow
conditions such as the potential cavitations can be very important and near-wall flow/spray conditions are difficult to deal
with.
6. Concluding remarks
In this report, physical modelling of spray combustion has been
briefly reviewed with focus on applications in combustion engines
and gas-turbine combustors. The currently available methodologies
for numerical simulations of sprays in CFD codes are presented, and
the physical modelling of atomization and sprays is subsequently
discussed. The applications of LES and DNS to atomization and
spray processes are then discussed. The recent progress in physical
modelling of spray combustion has also been discussed.
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
Atomization and spray processes are encountered in many
applications mainly in spray combustion, which is widely used
because it provides a method of rapidly vaporizing and mixing
liquid fuels with oxidizer and thus increases the combustion rate
significantly. Upon injection of the liquid fuel into a combustion
chamber, the liquid undergoes atomization, which causes the liquid
to break up into a large number of droplets of various sizes and
velocities. Depending on the spray properties and ambient conditions, some of the droplets may continue to shatter and some may
recombine in droplet collisions. During the process, vaporization
takes place and the fuel vapor produced by vaporization mixes with
the surrounding oxidizer. Consequently combustion of the vaporair mixture may occur due to the high temperature of the ambient
oxidizer, or an existing flame front or other ignition sources.
Spray plays an important role in liquid-fuel combustion and it is
one of the most effective measures to control the combustion
process. The spray affects the ignition behaviour, heat release and
pollutant formation of the liquid fuel. The kinetic energy of the spray
represents the main source for turbulence generation within the
combustion chamber, and therefore controls the microscale air-fuel
mixing and combustion rate. In a combustion engine, spray significantly affects the fuel consumption and exhaust emission of the
engine. The design of modern combustion engines is characterized
by more flexible fuel injections and atomizers come in a large
variety of designs and flow rates. Due to the multi-way interactions
between the droplets and the turbulent gas phase including the
flame and those among the droplets themselves, the spray
phenomena are very complex in nature. To obtain spray characteristics, engineers typically depend on empirical formulations.
Advances in the science and technology of atomization and sprays
will enhance the understanding of the complex physics, and more
importantly, to guide the practical applications of sprays.
During the past several decades there has been a tremendous
expansion of interest in the science and technology of atomization
and sprays, which has now developed into a major interdisciplinary
field of search. This growth of interest has been accompanied by
large strides in the areas of laser diagnostics for spray analysis
experimentally, and in a proliferation of mathematical models for
spray flow and combustion processes for theoretical and computational approaches. In practical applications, it is becoming
increasingly important for engineers to acquire a better understanding of the basic atomization process and to be fully conversant
with the capabilities and limitations of all the relevant atomization
devices. In particular, it is important to know which type of
atomizer is best suited for any given application and how the
performance of any given atomizer is affected by variations in liquid
properties and operating conditions. CFD can provide answers to
these questions, at a relatively low cost for RANS approach and at
a reasonable cost for LES. Numerical simulation represents a useful
tool to obtain spray characteristics. Significant advancement has
been made in numerical simulation and modelling of sprays and
the depth of analysis possible with spray models has increased
significantly over the past decades. Advanced CFD such as DNS
allows access to any process or state variable at any position at any
given point in time. As a powerful tool, CFD can provide valuable
insight into spray processes and the complex interacting subprocesses involved.
Among the different CFD approaches, the traditional RANS CFD
is best placed for industrial applications due to its low costs, but
atomization and spray modelling needs validation and further
development. As an advanced CFD methodology, LES provides
much improved predictions of flow unsteadiness over RANS, but
the modelling issues for atomization and spray remain to be solved.
As the most accurate methodology, DNS can be used to gain
fundamental understanding of the process which is not possible by
163
using any other means, but the computational costs are extremely
high. Various CFD methodologies can assist the advancement of the
science and technology of atomization and sprays, which in turn
will benefit the practical applications.
For the gasliquid two-phase jet flows in spray processes,
modelling and simulations can be performed at different level. In
DNS of gasliquid two-phase jet flows, the multiphase flow
system may be modelled based on a volume of fluid method with
front-tracking approach to model interface movements. DNS of
multiphase flows based on the one-fluid formalism coupled with
interface tracking algorithms seems to be a promising way
forward, due to the advantageous lower costs compared with
a multi-fluid approach. Front-tracking methods may be used to
track the gasliquid interface. In the homogenous two-phase flow
model (or Eulerian approach with mixed-fluid treatment), the
two phases are assumed to be a single-phase mixture with
averaged physical properties. However, DNS is not a practical tool
due to its high computational costs. As things stand, RANS and
LES can be useful tools for industrial applications. For practical
applications using RANS or LES, the choice of the model is not
only an obvious problem but it is also numerics and mesh size
dependent. LES and RANS heavily depend on the sub-models used
for the multiphase phenomena and turbulent combustion when
the flow is reacting.
The computation of spray dynamics in terms of the equations of
fluid mechanics and droplet ballistics is now possible by use of CFD
codes incorporating spray modelling. The modelling of sprays in
simple flow configurations has made significant progresses, but it
also has many unknown and unevaluated factors. Among these
factors, the most significant ones are those associated with the
atomization process, which are mostly in an empirical state.
Detailed knowledge of the droplet size and velocity is missing,
particularly for thick sprays. The application of CFD codes to
intermittent, thick sprays still presents many unsolved problems,
including questions concerning appropriate drag coefficient
correlations and turbulent mixing models. For combustion applications, the mechanism of spray vaporization and mixing is of
primary importance. Application of heat and mass transfer theory
allows models to predict vaporization histories for single, undeformed droplets of pure fuels. For many applications the
unsteady heating of the droplet must be taken into account.
Vaporization modelling for real fuels, which are complex liquid
mixtures, is not yet possible. These are areas in spray modelling
that need further investigation. Modelling spray combustion is
a challenging subject due to the complexity of the problem. There
are several issues that need particular attention.
The first issue is related to the choice of appropriate sub-models.
The state-of-the-art spray combustion modelling relies heavily on
theoretical assumptions and empiricism, particularly for the atomization process and thick sprays. A variety of sub-models are available. In a numerical simulation, using appropriate sub-models is of
crucial importance. The choice of appropriate model is, however,
problem dependent and one has to make the judgment based on the
understanding of the physical problem and modelling assumptions.
In many applications, it could involve the combination of different
models. For instance, one can combine the KelvinHelmholtz
breakup model together with the RayleighTaylor breakup model
for atomization. For high-pressure fuel injection, the effects of cavitation of the nozzle internal flow on the atomization may be taken
into account in the ‘‘wave’’ breakup model. The recently developed
Eulerian approach to model atomization can also be considered for
dense spray modelling.
Secondly, close attention should be paid to the empiricism
involved in spray modelling. In some cases, it might be necessary to
adjust the empirical constants in the model to match
164
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
experimentally obtained data. For the modelling of spray
combustion, the vaporization modelling of practical fuels is
important to the overall accuracy of the numerical prediction, but
appropriate modelling technique for the vaporization of complex
liquid mixtures is not yet possible. In this case, the properties of the
fuel mixture need to be adjusted according to empiricism and/or
experimental data in numerical modelling of spray combustion. In
spray combustion simulation, it is a common practice to tune
model parameters in order to adjust a calculation to experimentally obtained data. However, the adjustment should be justifiable
and the sub-models should not be trimmed to an unphysical
behaviour.
Thirdly, numerical issues are also of crucial importance in simulations of spray combustion. The most significant numerical issue
associated with simulations of spray combustion is the grid dependency. Grid dependency describes the phenomenon that calculations executed under identical physical conditions often yield
considerably different results when performed on different numerical grids, which are not only observed for different grid sizes but also
for varying grid arrangements. This problem is inherently linked
with EulerianLagrangian spray simulations and it is due to the lack
of spatial resolution in simulations of atomization and sprays in
practical systems such as a combustion engine and the lack of
statistical convergence in the Lagrangian treatment of the liquid
phase. In a practical simulation, the grid dependency should be
minimised as much as possible.
Finally, the advancement on physical modelling of spray
combustion depends on a better understanding of the physical
sub-processes. For the atomization process, the effect of liquidgas viscous shear layers on the onset of instabilities, which leads
to various regimes of the jet breakup, remains to be rigorously
analysed and tested. A complete delineation of the liquid jet
breakup regimes in the entire parameter space has not yet
appeared. However, the fundamental understanding on the
atomization process that involves jet breakup will eventually be
achieved with the progress in fundamental studies of liquid jets.
Consequently the fundamental knowledge on the atomization
process can be used to validate/develop liquid jet breakup models
that can significantly reduce the empiricism in the current atomization models. With the better understanding on the subprocesses involved, physical modelling of spray combustion will be
greatly enhanced.
References
[1] Chigier N. Atomization and burning of liquid fuel sprays. Progress in Energy
and Combustion Science 1976;2:97114.
[2] Jones AR. Review of drop size measurement application of techniques to
dense fuel sprays. Progress in Energy and Combustion Science 1977;3:22534.
[3] Lefebvre AV. Airblast atomization. Progress in Energy and Combustion
Science 1980;6:23361.
[4] Elkotb MM. Fuel atomization for spray modeling. Progress in Energy and
Combustion Science 1982;8:6191.
[5] Faeth GM. Evaporation and combustion of sprays. Progress in Energy and
Combustion Science 1983;9:176.
[6] Sirignano WA, Mehring C. Fuel droplet vaporization and spray combustion
theory. Progress in Energy and Combustion Science 1983;9:291322.
[7] Faeth GM. Mixing, transport and combustion in sprays. Progress in Energy
and Combustion Science 1987;13:293345.
[8] Kamimoto T, Kobayashi H. Combustion processes in diesel engines. Progress
in Energy and Combustion Science 1991;17:16389.
[9] Chigier N. Optical imaging of sprays. Progress in Energy and Combustion
Science 1991;17:21162.
[10] Annamalai K, Ryan W. Interactive processes in gasification and combustion. 1.
Liquid-drop arrays and clouds. Progress in Energy and Combustion Science
1992;18:22195.
[11] Umemura A. Interactive droplet vaporization and combustion approach
from asymptotics. Progress in Energy and Combustion Science 1994;20:
32572.
[12] Reitz RD, Rutland CJ. Development and testing of diesel-engine CFD models.
Progress in Energy and Combustion Science 1995;21:17396.
[13] Gelfand BE. Droplet breakup phenomena in flows with velocity lag. Progress
in Energy and Combustion Science 1996;22:20165.
[14] Orme M. Experiments on droplet collisions, bounce, coalescence and
disruption. Progress in Energy and Combustion Science 1997;23:6579.
[15] Aggarwal SK. A review of spray ignition phenomena: present status and future
research. Progress in Energy and Combustion Science 1998;24:565600.
[16] Lin SP, Reitz RD. Drop and spray formation from a liquid jet. Annual Review of
Fluid Mechanics 1998;30:85105.
[17] Bellan J. Supercritical (and subcritical) fluid behavior and modeling: drops,
streams, shear and mixing layers, jets and sprays. Progress in Energy and
Combustion Science 1999;26:32966.
[18] Chiu HH. Advances and challenges in droplet and spray combustion. I.
Toward a unified theory of droplet aerothermochemistry. Progress in Energy
and Combustion Science 2000;26:381416.
[19] Sirignano WA, Mehring C. Review of theory of distortion and disintegration
of liquid streams. Progress in Energy and Combustion Science 2000;26:
60955.
[20] Lasheras JC, Hopfinger EJ. Liquid jet instability and atomization in a coaxial
gas stream. Annual Review of Fluid Mechanics 2000;32:275308.
[21] Sovani SD, Sojka PE, Lefebvre AH. Effervescent atomization. Progress in
Energy and Combustion Science 2001;27:483521.
[22] Babinsky E, Sojka PE. Modeling drop size distribution. Progress in Energy and
Combustion Science 2002;28:30329.
[23] Birouk M, Gokalp I. Current status of droplet evaporation in turbulent flows.
Progress in Energy and Combustion Science 2006;32:40823.
[24] Chigier N. Challenges for future research in atomization and spray technology:
Arthur Lefebvre memorial lecture. Atomization and Sprays 2006;16:72736.
[25] Villermaux E. Fragmentation. Annual Review of Fluid Mechanics
2007;39:41946.
[26] Sher E, Bar-Kohany T, Rashkovan A. Flash-boiling atomization. Progress in
Energy and Combustion Science 2008;34:41739.
[27] Gorokhovski M, Herrmann M. Modeling primary atomization. Annual Review
of Fluid Mechanics 2008;40:34366.
[28] Anderson JD. Computational fluid dynamics: the basics with applications.
New York: McGraw-Hill; 1995.
[29] Amsden AA, O’Rourke PJ, Butler TD. KIVA-II: a computer program for
chemically reactive flows with sprays. DE89-012805. Los Alamos, NM: Los
Alamos National Laboratory; 1989.
[30] Torres DJ, Trujillo MF. KIVA-4: an unstructured ALE code for compressible gas
flow with sprays. Journal of Computational Physics 2006;219:94375.
[31] Williams FA. Combustion theory. Redwood City, CA: Addison-Wesley; 1985.
[32] Reitz RD. In: Challen B, Baranescu R, editors. Diesel engine reference book.
Boston: Elsevier ButterworthHeinemann; 1999. p. 15372.
[33] Dukowicz JK. A particle-fluid numerical model for liquid sprays. Journal of
Computational Physics 1980;35:22953.
[34] Bracco FV. Modeling of engine sprays. SAE Transactions 1985;94:14467.
[35] Arcoumanis C, Gavaises M. Linking nozzle flow with spray characteristics in
a diesel fuel injection system. Atomization and Sprays 1998;8:30747.
[36] Abraham J. What is adequate resolution in the numerical computations of
transient jets? SAE Transactions 1997;106:14155.
[37] Stiesch G. Modelling engine spray and combustion processes. Berlin:
Springer; 2003.
[38] O’Rourke PJ, Amsden AA. The TAB method for numerical calculation of spray
droplet breakup. SAE paper 872089; 1987.
[39] Reitz RD. Modeling atomization processes in high-pressure vaporizing
sprays. Atomization and Spray Technology 1987;3:30937.
[40] Reitz RD, Diwakar R. Effect of drop breakup on fuel sprays. SAE paper
860469; 1986.
[41] Ashgriz N, Poo JY. Coalescence and separation in binary collisions of liquid
drops. Journal of Fluid Mechanics 1990;221:183204.
[42] Georjon TL, Reitz RD. A drop-shattering collision model for multi-dimensional spray computations. Atomization and Sprays 1999;9:23154.
[43] Post SL, Abraham J. Modelling the outcome of dropdrop collisions in diesel
sprays. International Journal of Multiphase Flow 2002;28:9971019.
[44] O’Rourke PJ, Bracco FV. Modelling drop interactions in thick sprays and
a comparison with experiments. Proceedings of the Institution of Mechanical
Engineers 1980;9:10116.
[45] Senda J, Kobayashi M, Iwashita S, Fujimoto H. Modelling of diesel spray
impingement on a flat wall. SAE paper 941894; 1994.
[46] Bai CX, Gosman AD. Development of methodology for spray impingement
simulation. SAE paper 950283; 1995.
[47] Naber JD, Reitz RD. Modelling engine spray/wall impingement. SAE paper
880107; 1988.
[48] Amsden AA. KIVA-3: a KIVA program with block structured mesh for
complex geometries. Los Alamos National Laboratory Report, LA-12503-MS,
Los Alamos, NM; 1993.
[49] Eckhause JE, Reitz RD. Modelling heat transfer to impinging fuel sprays in
direct injection engines. Atomization and Sprays 1995;5:21342.
[50] Stanton D, Rutland C. Modelling fuel film formation and wall interaction in
diesel engines. SAE paper 960628; 1996.
[51] Gao J, Jiang DM, Huang ZH. Spray properties of alternative fuels: a comparative
analysis of ethanol-gasoline blends and gasoline. Fuel 2007;86:164550.
[52] Lippert AM, Reitz RD. Modelling of multi-component fuels using continuous
distributions with application to droplet evaporation and sprays. SAE paper
972882; 1997.
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
[53] Zhu GS, Reitz RD, Xin J, Takabayashi T. Characteristics of vaporizing continuous multi-component fuel sprays in a port fuel injection gasoline engines.
SAE paper 2001-01-1231; 2001.
[54] Richardson LF. Weather prediction by numerical process. London: Cambridge
University Press; 1922.
[55] Kolmogorov AN. The local structure of turbulence in incompressible viscous
fluid for very large Reynolds numbers. Proceedings of the Royal Society of
London, Series A: Mathematical and Physical Sciences 1991;434:913.
[56] Erlebacher G, Hussaini MY, Speziale CG, Zang TA. Toward the large-eddy
simulation of compressible turbulent flows. Journal of Fluid Mechanics
1992;238:15585.
[57] Fröchlich J, Rodi W. In: Launder BE, Sandham ND, editors. Closure strategies
for turbulent and transitional flows. Cambridge: Cambridge University Press;
2002. p. 26798.
[58] Lesieur M, Métais O, Compte P. Large-eddy simulations of turbulence. Cambridge: Cambridge University Press; 2005.
[59] Speziale CG. Galilean invariance of subgrid-scale stress models in the largeeddy simulation of turbulence. Journal of Fluid Mechanics 1985;156:5562.
[60] Sone K, Patel N, Menon S. Large-eddy simulation of fuelair mixing in an
internal combustion engine. AIAA paper 2001-0635; 2001.
[61] Sone K, Menon S. Effect of subgrid modeling on the in-cylinder unsteady
mixing process in a direct injection engine. ASME Journal of Engineering for
Gas Turbines and Power 2003;125:43543.
[62] Menon S, Yeung PK, Kim WW. Effect of subgrid models on the computed
interscale energy transfer in isotropic turbulence. Computers and Fluids
1996;25:16580.
[63] Calhoon WH. On subgrid combustion modeling for large-eddy simulations.
PhD thesis. Georgia, USA: Georgia Institute of Technology; 1996.
[64] Dinkelacker F, Soika A, Most D, Hofmann D, Leipertz A, Polifke W, et al.
Structure of locally quenched highly turbulent lean premixed flames.
Proceedings of the Combustion Institute 1998;27:85765.
[65] Buschmann A, Dinkelacker F, Schaefer T, Schaefer M, Wolfrum J. Measurement of the instantaneous detailed flame structure in turbulent premixed
combustion. Proceedings of the Combustion Institute 1996;26:43745.
[66] Kiefer J, Li ZS, Zetterberg J, Bai XS, Aldén M. Investigation of local flame
structures and statistics in partially premixed turbulent jet flames using
simultaneous single-shot CH and OH planar laser-induced fluorescence
imaging. Combustion and Flame 2008;154:80218.
[67] Li ZS, Kiefer J, Zetterberg J, Linvin M, Leipertz A, Bai XS, et al. Development of
improved PLIF CH detection using an Alexandrite laser for single-shot
investigation of turbulent and lean flames. Proceedings of the Combustion
Institute 2007;31:72735.
[68] Menon S, Patel N. Subgrid modeling for simulation of spray combustion in
large-scale combustors. AIAA Journal 2006;44:70923.
[69] Candel S. Combustion dynamics and control: progress and challenges.
Proceedings of the Combustion Institute 2002;29:128.
[70] Ghosal S. Mathematical and physical constraints on LES. AIAA paper 982803; 1998.
[71] Fureby C, Grinstein FF. Monotonically integrated large eddy simulation of free
shear flows. AIAA Journal 1999;37:54456.
[72] Wang P, Bai XS, Wessman N, Klingmann J. Large eddy simulation and
experimental studies of a confined turbulent swirling flow. Physics of Fluids
2004;16:330624.
[73] Smagorinsky J. General circulation experiments with the primitive equations.
Monthly Weather Review 1963;91:99164.
[74] Tennekes H, Lumley JL. A first course in turbulence. Cambridge, MA: The MIT
Press; 1972.
[75] Germano M, Piomelli U, Moin P, Cabot WH. A dynamic sub-grid scale eddy
viscosity model. Physics of Fluids A 1991;3:17605.
[76] Pomraning E, Rutland CJ. A dynamic one-equation non-viscosity large-eddy
simulation model. AIAA Journal 2002;40:689701.
[77] Bardina J, Ferziger JH, Reynolds WC. Improved subgrid scale models for largeeddy simulation. AIAA paper 80-1357; 1980.
[78] Yeo WK. A generalized high pass/low pass averaging procedure for deriving
and solving turbulent flow equations. PhD dissertation, The Ohio State
University, Columbus, OH; 1987.
[79] Liu S, Meneveau C, Katz J. On the properties of similarity subgrid-scale
models as deduced from measurements in a turbulent jet. Journal of Fluid
Mechanics 1994;275:83119.
[80] Akhavan R, Ansari A, Kang S, Mangiavacchi N. Subgrid-scale interactions in
a numerically simulated planar turbulent jet and implications for modelling.
Journal of Fluid Mechanics 2000;408:83120.
[81] Domaradzki JA, Liu W, Brachet ME. An analysis of subgrid-scale interactions in
numerically simulated isotropic turbulence. Physics of Fluids A 1993;5:
174759.
[82] Dimotakis PE. Turbulent mixing. Annual Review of Fluid Mechanics
2005;37:32956.
[83] Kerstein AR. A linear-eddy model of turbulent scalar transport and mixing.
Combustion Science and Technology 1988;60:391421.
[84] Lumley JL. Engines: an introduction. Cambridge: Cambridge University Press;
1999.
[85] Pope SB. Turbulent flows. Cambridge: Cambridge University Press; 2000.
[86] Seshadri K, Bai XS. Rate-ratio asymptotic analysis of the structure and
extinction of partially premixed flames. Proceedings of the Combustion
Institute 2007;31:11818.
165
[87] Bray KNC. The challenge of turbulent combustion. Proceedings of the
Combustion Institute 1996;26:126.
[88] Givi P. Model free simulation of turbulent reactive flows. Progress in Energy
and Combustion Science 1989;15:1107.
[89] Magnussen BF, Hjertager BH. On mathematical modeling of turbulent
combustion with special emphasis on soot formation and combustion.
Proceedings of the Combustion Institute 1976;16:71929.
[90] Fureby C. On subgrid scale modelling in large eddy simulations of
compressible fluid flow. Physics of Fluids 1996;8:130111.
[91] Pope SB. PDF methods for turbulent reacting flows. Progress in Energy and
Combustion Science 1985;11:11992.
[92] Gao F, O’Brien EE. A large eddy simulation scheme for turbulent reactive
flows. Physics of Fluids A 1993;5:12824.
[93] Drozda TG, Sheikhi MRH, Madnia CK, Givi P. Developments in formulation
and application of the filtered density function. Flow, Turbulence and
Combustion 2007;78:3567.
[94] Klimenko AY, Bilger RW. Conditional moment closure for turbulent
combustion. Progress in Energy and Combustion Science 1999;25:595687.
[95] Menon S, McMurtry PA, Kerstein AR. In: Galperin B, Orszag S, editors. LES of
complex engineering and geophysical flows. Cambridge: Cambridge
University Press; 1993. p. 287314.
[96] Kerstein AR. Linear-eddy model of turbulent transport 4. structure of diffusion-flames. Combustion Science and Technology 1992;81:7596.
[97] Menon S, Calhoon W. Subgrid mixing and molecular transport modelling for
large-eddy simulations of turbulent reacting flows. Proceedings of the
Combustion Institute 1996;26:5966.
[98] Sankaran V. Subgrid combustion modeling for compressible two-phase reacting
flows. PhD thesis. Georgia, USA: Georgia Institute of Technology; 2003.
[99] Williams FA. In: Buckmaster J, editor. The mathematics of combustion.
Philadelphia: SIAM; 1985. p. 97131 [chapter 3].
[100] Wang P, Bai XS. Large eddy simulation of turbulent premixed flames using
level-set G-equation. Proceedings of the Combustion Institute 2005;30:
58391.
[101] Nogenmyr KJ, Fureby C, Bai XS, Petersson R, Collin R, Linne M. Large eddy
simulation and laser diagnostic studies on a low swirl stratified premixed
flame. Combustion and Flame 2009;156:2536.
[102] Nilsson P, Bai XS. Level-set flamelet library approach for premixed turbulent
combustion. Experimental Thermal and Fluid Science 2000;21:8798.
[103] Pitsch H. Large-eddy simulation of turbulent combustion. Annual Review of
Fluid Mechanics 2006;38:45382.
[104] van Oijen JA, de Goey LPH. Modelling of premixed laminar flames using
flamelet-generated manifolds. Combustion Science and Technology
2000;161:11337.
[105] van Oijen JA, Bastiaans RJM, Groot GRA, de Goey LPH. Direct numerical
simulations of premixed turbulent flames with reduced chemistry: validation
and flamelet analysis. Flow Turbulence and Combustion 2005;75:6784.
[106] Vreman AW, Albrecht BA, van Oijen JA, de Goey LPH, Bastiaans RJM. Premixed and nonpremixed generated manifolds in large-eddy simulation of
Sandia flame D and F. Combustion and Flame 2008;153:394416.
[107] Delhaye S, Somers LMT, van Oijen JA, de Goey LPH. Incorporating unsteady
flow-effects in flamelet generated manifolds. Combustion and Flame
2008;155:13344.
[108] Bastiaans RJM, van Oijen JA, de Goey LPH. Analysis of a strong mass-based
flame stretch model for turbulent premixed combustion. Physics of Fluids
2009;21:015105.
[109] Valentino M, Jiang X, Zhao H. A comparative RANS/LES study of transient gas
jets and sprays under diesel conditions. Atomization and Sprays
2007;17:45172.
[110] Gao J, Jiang DM, Huang ZH, Wei Q. Characteristics of nonevaporating free
sprays of a high-pressure swirl injector under various ambient and injection
pressures. Energy & Fuel 2005;19:190610.
[111] Sirignano WA. Fluid dynamics and transport of droplets and sprays. Cambridge: Cambridge University Press; 1999.
[112] de Villers E, Gosman AD, Weller HG. Large eddy simulation of primary diesel
spray atomization. SAE technical paper 2004-01-0100; 2004.
[113] Faeth GM, Lazar RS. Fuel droplet burning rates in a combustion gas environment. AIAA Journal 1971;9:1593612.
[114] Miller RS, Bellan J. Direct numerical simulation of a confined three-dimensional gas mixing layer with one evaporating hydrocarbon-droplet-laden
stream. Journal of Fluid Mechanics 1999;384:293338.
[115] Vinkovic I, Aguirre C, Simoëns S, Gorkhovski M. Large eddy simulation of
droplet dispersion for inhomogeneous turbulent wall flow. International
Journal of Multiphase Flow 2006;32:34464.
[116] Gorokhovski MA. The stochastic Lagrangian model of drops breakup in the
computation of liquid sprays. Atomization Sprays 2001;11:50520.
[117] Apte SV, Gorokhovski M, Moin P. LES of atomizing spray with stochastic
modeling of secondary breakup. International Journal of Multiphase Flow
2003;29:150322.
[118] van Wachem BGM, Almstedt AE. Methods for multiphase computational fluid
dynamics. Chemical Engineering Journal 2003;96:8198.
[119] Schlüter JU. Consistent boundary conditions for integrated RANS/LES simulations: LES inflow conditions. AIAA paper 2003-3971; 2003.
[120] Klein M, Sadiki A, Janicka J. A digital filter based generation of inflow data for
spatially developing direct numerical or large eddy simulations. Journal of
Computational Physics 2003;186:65265.
166
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
[121] Jagus K, Jiang X, Dober G, Greeves G, Milanovic N, Zhao H. Assessment of LES
feasibility in modelling the unsteady diesel fuel injection and mixing in
a HSDI engine. Proceedings of the Institution of Mechanical Engineers, Part
D: Journal of Automobile Engineering 2009;223:103348.
[122] Crowe CT. Multiphase flow handbook. New York: Taylor & Francis; 2006.
[123] Loth E. Computational fluid dynamics of bubbles, drops and particles. Cambridge: Cambridge University Press; 2009.
[124] Lakehal D, Meier M, Fulgosi M. Interface tracking towards the direct simulation of heat and mass transfer in multiphase flows. International Journal of
Heat and Fluid Flow 2002;23:24257.
[125] Liovic P, Lakehal D. Multi-physics treatment in the vicinity of arbitrarily
deformable gasliquid interfaces. Journal of Computational Physics
2007;222:50435.
[126] Richards JR, Beris AN, Lenhoff AM. Drop formation in liquidliquid systems
before and after jetting. Physics of Fluids 1995;7:261730.
[127] Jiang X, Siamas GA. Direct computation of an annular liquid jet. Journal of
Algorithms & Computational Technology 2007;1:10325.
[128] Siamas GA, Jiang X. Direct numerical simulation of a liquid sheet in
a compressible gas stream in axisymmetric and planar configurations.
Theoretical and Computational Fluid Dynamics 2007;21:44771.
[129] Siamas GA, Jiang X, Wrobel LC. A numerical study of an annular liquid jet in
a compressible gas medium. International Journal of Multiphase Flow
2008;34:393407.
[130] Siamas GA, Jiang X, Wrobel LC. Dynamics of annular gasliquid two-phase swirling jets. International Journal of Multiphase Flow 2009;35:
45067.
[131] Loth E. Numerical approaches for motion of dispersed particles, droplets and
bubbles. Progress in Energy and Combust Science 2000;26:161223.
[132] Maxey MR, Riley JJ. Equation of motion for a small rigid sphere in
a nonuniform flow. Physics of Fluids 1983;26:8839.
[133] Mashayek F, Jaberi FA, Miller RS, Givi P. Dispersion and polydispersity of
droplets in stationary isotropic turbulence. International Journal of Multiphase Flow 1997;23:33755.
[134] Mashayek F. Direct numerical simulations of evaporating droplet dispersion
in forced low Mach number turbulence. International Journal of Heat and
Mass Transfer 1998;41:260117.
[135] Ling W, Chung JN, Troutt TR, Crowe CT. Direct numerical simulation of a three
dimensional temporal mixing layer with particle dispersion. Journal of Fluid
Mechanics 1998;358:6185.
[136] Miller RS, Bellan J. Direct numerical simulation and subgrid analysis of
a transitional droplet laden mixing layer. Physics of Fluids 2000;12:65071.
[137] Poinsot T, Veynante D. Theoretical and numerical combustion. Philadelphia:
Edwards; 2005.
[138] Scardovelli R, Zaleski S. Direct numerical simulation of free-surface and
interfacial flow. Annual Review of Fluid Mechanics 1999;31:567603.
[139] Harlow FH, Welch JE. Numerical calculation of time-dependent viscous
incompressible flow of fluid with a free surface. Physics of Fluids
1965;8:21829.
[140] Daly BJ, Pracht WE. Numerical study of density-current surges. Physics of
Fluids 1968;11:1530.
[141] Daly BJ. Numerical study of the effect of surface tension on interface instability. Physics of Fluids 1969;12:134054.
[142] Rudman M. Volume-tracking methods for interfacial flow calculations.
International Journal of Numerical Methods in Fluids 1997;24:67191.
[143] Noh WF, Woodward P. SLIC (simple line interface calculation). In: van de
Vooren AI, Zandbergen PJ, editors. Proceedings of the fifth international
conference on numerical methods in fluid dynamics. Berlin: Springer; 1976.
p. 33040.
[144] Hirt CW, Nichols BD. Volume of fluid (VOF) method for the dynamics of free
boundaries. Journal of Computational Physics 1981;39:20125.
[145] Young DL. Time-dependent multi-material flow with large fluid distortion.
In: Morton KW, Baines MJ, editors. Numerical methods for fluid dynamics.
New York: Academic Press; 1982. p. 27385.
[146] Rider WJ, Kothe DB. Reconstructing volume tracking. Journal of Computational Physics 1998;141:11252.
[147] Gueyffier D, Li J, Nadim A, Scardovelli R, Zaleski S. Volume-of-fluid interface
tracking with smoothed surface stress methods for three-dimensional flows.
Journal of Computational Physics 1999;152:42356.
[148] Gao D, Morley NB, Dhir V. Numerical simulation of wavy falling film flow
using VOF method. Journal of Computational Physics 2003;192:62442.
[149] Chorin AJ. Flame advection and propagation algorithms. Journal of Computational Physics 1980;35:111.
[150] Ashgriz N, Poo JY. FLAIR: flux line-segment model for advection and interface
reconstruction. Journal of Computational Physics 1991;93:44968.
[151] Pilliod Jr JE, Puckett EG. Second-order accurate volume-of-fluid algorithms
for tracking material interfaces. Journal of Computational Physics
2004;199:465502.
[152] Bell J, Dawson C, Shubin G. An unsplit, higher order Godunov method for
scalar conservation laws in multiple dimensions. Journal of Computational
Physics 1988;74:124.
[153] Collela P. Multidimensional upwind methods for hyperbolic conservation
laws. Journal of Computational Physics 1990;87:171200.
[154] Puckett EG, Almgren AS, Bell JB, Marcus DL, Rider WJ. A high-order projection
method for tracking fluid interfaces in variable density incompressible flows.
Journal of Computational Physics 1997;130:26982.
[155] Osher SJ, Sethian JA. Fronts propagating with curvature dependent speed:
algorithms based on HamiltonJacobi formulations. Journal of Computational Physics 1988;79:1249.
[156] Osher SJ, Fedkiw RP. Level set methods: an overview and some recent results.
Journal of Computational Physics 2001;169:463502.
[157] Sethian JA. Level set methods and fast marching methods: evolving interfaces in computational geometry, fluid mechanics, computer vision and
material sciences. Cambridge: Cambridge University Press; 1999.
[158] Sethian JA. Evolution, implementation and application of level set and fast
marching methods for advancing fronts. Journal of Computational Physics
2001;169:50355.
[159] Sethian JA, Smereka P. Level set methods for fluid interfaces. Annual Review
of Fluid Mechanics 2003;35:34172.
[160] Sussman M, Puckett EG. A coupled level set and volume-of-fluid method for
computing 3D and axisymmetric incompressible two-phase flows. Journal of
Computational Physics 2000;162:30137.
[161] Unverdi SO, Tryggvason G. A front-tracking method for viscous, incompressible, multi-fluid flows. Journal of Computational Physics 1992;100:2537.
[162] Brackbill JU, Kothe DB, Zemach C. A continuum method for modeling surface
tension. Journal of Computational Physics 1992;100:33554.
[163] Siamas GA. Direct computations of gasliquid two-phase jets/sheets. PhD
thesis. Uxbridge, London: Brunel University; 2008.
[164] Harvie DJE, Davidson MR, Rudman M. An analysis of the parasitic current
generation in volume of fluid simulations. Applied Mathematical Modelling
2006;30:105666.
[165] Williamson JH. Low-storage RungeKutta schemes. Journal of Computational
Physics 1980;35:124.
[166] Wray AA. Very low storage time-advancement schemes. Internal report.
Moffett Field, California: NASA-Ames Research Center; 1986.
[167] Drikakis D, Rider W. High-resolution methods for incompressible and lowspeed flows. Berlin: SpringerVerlag; 2005.
[168] Kim J, Moin P. Application of a fractional-step method to incompressible
NavierStokes equations. Journal of Computational Physics 1985;59:
30823.
[169] Ekaterinaris JA. High-order accurate, low numerical diffusion methods for
aerodynamics. Progress in Aerospace Science 2005;41:192300.
[170] Lele SK. Compact finite-difference schemes with spectral-like resolution.
Journal of Computational Physics 1992;103:1642.
[171] Mahesh K. A family of high-order finite difference schemes with good
spectral resolution. Journal of Computational Physics 1998;145:33258.
[172] Morinishi Y, Lund TS, Vasilyev OV, Moin P. Fully conservative higher order
finite difference schemes for incompressible flow. Journal of Computational
Physics 1998;143:90124.
[173] Morinishi Y, Vasilyev OV, Ogi T. Fully conservative finite difference scheme in
cylindrical coordinates for incompressible flow simulations. Journal of
Computational Physics 2004;197:686710.
[174] Nicoud F. Conservative high-order finite-difference schemes for low-Mach
number flows. Journal of Computational Physics 2000;158:7197.
[175] Desjardins O, Blanquart G, Balarac G, Pitsch H. High order conservative finite
difference scheme for variable density low Mach number turbulent flows.
Journal of Computational Physics 2008;227:712559.
[176] Wang ZJ. Spectral (finite) volume method for conservation laws on
unstructured grids basic formulation. Journal of Computational Physics
2002;178:21051.
[177] Patera AT. A spectral element method for fluid dynamics laminar flow in
a channel expansion. Journal of Computational Physics 1984;54:46888.
[178] Helenbrook BT. A two-fluid spectral-element method. Computer Methods in
Applied Mechanics and Engineering 2001;191:27394.
[179] Arcoumanis C, Badami M, Flora H, Gavaises M. Cavitation in real-size multihole diesel injector nozzles. SAE paper 2000-01-1249; 2000.
[180] Meyer J, Weihs D. Capillary instability of an annular liquid jet. Journal of Fluid
Mechanics 1987;179:53145.
[181] Cousin J, Nuglisch HJ. Modelling of internal flow in high pressure swirl
injectors. SAE paper 2001-01-0963; 2001.
[182] Senecal PJ, Schmidt DP, Nouar I, Rutland CJ, Reitz RD, Corradini ML. Modeling
high-speed viscous liquid sheet atomization. International Journal of Multiphase Flow 1999;25:107397.
[183] Schmidt DP, Rutland CJ. A new droplet collision algorithm. Journal of
Computational Physics 2000;164:6280.
[184] Wan Y, Peters N. Scaling of spray penetration with evaporation. Atomization
and Sprays 1999;9:11132.
[185] Blokkeel G, Barbeau B, Borghi R. A 3D Eulerian model to improve the primary
breakup of atomizing jet. SAE paper 2003-01-0005; 2003.
[186] Yi Y, Reitz RD. Modelling the primary breakup of high-speed jets. Atomization and Sprays 2004;14:5379.
[187] Saville DA. Electrohydrodynamics: the Taylor-Melcher leaky dielectric model.
Annual Review of Fluid Mechanics 1997;29:2764.
[188] de la Mora JF. The fluid dynamics of Taylor cones. Annual Review of Fluid
Mechanics 2007;39:21743.
[189] Karayiannis TG, Xu Y. Electric field effect in boiling heat transfer. Part A:
Simulation of the electric field and electric forces. Journal of Enhanced Heat
Transfer 1998;5:21729.
[190] Weinan E, Engquist B, Huang ZY. Heterogeneous multiscale method:
a general methodology for multiscale modeling. Physics Review B 2003;67.
Article Number 092101.
X. Jiang et al. / Progress in Energy and Combustion Science 36 (2010) 131167
[191] Jiang X, Lai CH. Numerical techniques for direct and large-eddy simulations.
New York: CRC Press, Taylor & Francis; 2009.
[192] Weinan E, Engquist B. Multiscale modeling and simulation. Notices of the
American Mathematical Society 2003;50:106270.
[193] Desjardins O, Moureau V, Pitsch H. An accurate conservative level set/ghost
fluid method for simulating turbulent atomization. Journal of Computational
Physics 2008;227:8395416.
[194] Olsson E, Kreiss G. A conservative level set method for two phase flow.
Journal of Computational Physics 2005;210:22546.
[195] Olsson E, Kreiss G, Zahedi S. A conservative level set method for two phase
flow II. Journal of Computational Physics 2007;225:785807.
167
[196] Klein M. Direct numerical simulation of a spatially developing water sheet at
moderate Reynolds number. International Journal of Heat and Fluid Flow
2005;26:72231.
[197] Fedkiw R, Aslam T, Merriman B, Osher S. A non-oscillatory Eulerian approach
to interfaces in multimaterial flows (the ghost fluid method). Journal of
Computational Physics 1999;152:45792.
[198] Massot M. Eulerian multi-fluid models for polydisperse evaporating sprays.
In: Marchisio DL, Fox RO, editors. Multiphase reacting flows: modelling and
simulation. Vienna: Springer; 2007. p. 79123.
[199] Beck JC, Watkins AP. On the development of spray submodels based on droplet
size moments. Journal of Computational Physics 2002;182:136.