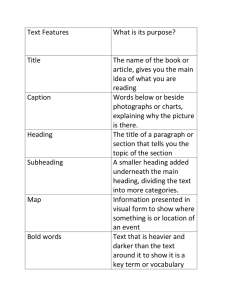
Table of Contents What is Auto Pilot? SOLAS Requirement for Auto Pilot Advantages of Autopilot Limitations of Autopilot Block Diagram Working of Auto Pilot Control Units o o o o o o • o ▪ ▪ ▪ ▪ o o o o Proportional Control Derivative Control Integral Control PID Control Autopilot Control Panel Precautions Changing over from Hand Steering to Auto Steering Changing over to Emergency Steering System ▪ Use of the Auto Pilot What is Auto Pilot? NAVIPILOT- 4000 v1 • • • • • The autopilot is equipment used to maintain the ship’s set course electronically and electrically for a long period of time when alteration of course is not required. The Auto Pilot is used when a ship has to steer a set course for a long time without alteration. This is achieved by comparing the course to steer with the ship’s heading obtained by gyro or magnetic compasses. means, Set Course is 020° T Gyro Course is 025° T 5° Error to stbd So Auto pilot will give helm to Port to make course steady. Any difference between the two will cause an error signal voltage to be created and accordingly correcting helm will be applied to the rudder to bring the ship back to the set course. This is intended to remove the need for the operator to assess the correct control settings. In effect the autopilot ‘learns’ the vessel’s handling characteristics in calm weather and then, when the weather deteriorate, can distinguish between those errors in heading due to the weather and those due to vessel’s normal handling characteristics. Any deviaition from the set course is controlled Automatically and Electronically. SOLAS Requirement for Auto Pilot As required by SOLAS Ch V/ Reg 19.2.8.2 “All ships of 10,000 gross tonnage and upwards shall, in addition to meeting the requirements of paragraph 2.7 with the exception of paragraph 2.7.2, have a heading or track control system, or other means, to automatically control and keep to a heading and/or straight track.” Advantages of Autopilot • • • • • Increase the average speed as the ship does not follow zig-zag across the track; Course-keeping; It also ensures that the ship’s steering gear operates at minimum; Fuel Saving; An Autopilot does not replace the duty of Helmsman, but reduce the work load on Bridge Team. Limitations of Autopilot Auto pilot should not be used under following circumstances: • • • • • • • • In rough weather; During large alterations of courses; At slow speeds; In heavy traffic areas; In conditions of reduced visibility; While manoeuvring the vessel; In narrow channels and confined waters; In shallow waters. Block Diagram Working of Auto Pilot • The course to be steered by using Autopilot is selected by course selector knob while present heading of the ship is indicated on the Gyro or Magnetic Compass. • • • • • • The output from the Gyro or Magnetic Compass is coupled or mixed to the Comparator in the Control Unit along with the input signal from manual course setting control. Any difference between the two signals cause an error signal whose magnitude or amount is proportional to the difference between the two signal and hence the Comparator is also known as Proportional Control. In addition to the Comparator, the Control Unit also contains or consist of Integrators and Derivator which analyses the signal from Gyro or Magnetic Compass and signal from course selector. Assuming Amplifier is used to obtain a resultant error signal from these three controls: Integrator, Comparator, and Derivator. This error signal is fed to the error amplifier, which also gets feedback from Rudder, consist of Rudder position and its movement. The output of error amplifier is fed via Telemotor to the steering gear unit and it results into turn the rudder. Control Units Proportional Control The effect on steering when only proportional control is applied causes. The rudder to move by an amount proportional to the off-course error from the course to steer and the shio will oscillate on either side of the required line. Output of the controller is proportional to the offcourse error from the course to steer (deviation). Controller Output = constant (Kp) x Deviation Derivative Control • • • In Derivative Control the rudder is shifted by an amount proportional to the Rate of Change of ships deviation from the course. It will work on the rate of change of course and give proportional helm and follow parallel path to course to steer track. An ideal combination of both proportional and derivative control produces a more satisfactory return to course. Output of the controller is proportional to the rate of change of error ( deviation ). Controller Output = Constant (Kp) x change of error / time Integral Control There are some errors due to design parameters of the ship like: • o ▪ ▪ ▪ • • • Shape of the ship’s hull; Transverse Thrust; Longitudinal Thrust; Data signals are produced by continuously sensing Heading Error over a period of time and applying an appropriate degree of permanent helm os used for this purpose. The Rudder used to correct the course will now be permanent helm instead of actual midship, i.e. permanent helm now acts as midship. Output of the controller is proportional to the summation of all instantaneous values of error ( deviation ) for as long as error persists. PID Control • • The combined action of proportional integral and derivative control is called PID Control. PID Control comes into use when the ship deviates from the set course. Eg: Initial Course to steer- 090°, then changes to 093°. When ship’s set course is changed. Initial course was 090°, now we have to steer 100° In Control Unit: • • • The proportional control unit determines the rudder angle to be used. The Derivative Control takes care of the counter helm used The Integral Control considers the effects of ship’s parameters In addition, there is Filter System for action of wind and waves. Output signal is proportional to the deviation, persists as long as deviation persists and also depends on rate of change of deviation i.e. Proportional + Integral + Derivative Autopilot Control Panel • • • • Weather Setting Control: When steering in heavy weather with wind and sea at an angle to the vessel’s heading, there is a tendency for the vessel’s head to be turned in a particular direction. The effect of this can be offset by maintaining some permanent value of the rudder angle; this angle is set using ‘weather helm’ after a period of trial and error. Synchronization Control: This control temporarily disconnects gyro repeater from the main gyro for sync of heading. Required for sync and when gyro switched off and restarted. Rudder Control: This is a proportional controller which transmits a signal which is proportional to the course error Controller Output = Constant (Kp) x Deviation o The ratio can be changed by settings ( i.e. the ratio between instantaneous heading error and rudder command) o Also called Rudder Multiplier o Control knob alters the ratio of output. Higher setting — Larger Rudder Angle (Results in overcorrecting – overshooting) Lower setting – Less rudder angle (Long time to return to Set Co– Sluggish) Therefore optimum setting required. Counter-rudder Control: This is Derivative control. o ▪ ▪ ▪ ▪ ▪ ▪ ▪ ▪ ▪ • The purpose is to apply a relatively greater amount of helm at the beginning of a course alteration to get the ship turning. Once the ship is turning, just enough helm is applied in order to keep her coming around. When a new heading is approached, the opposite helm is applied to stop the swing. As the ship settles on a new heading and the yaw rate disappears, the helm is removed. Produces an output when the course of the vessel is changing. Depends on the rate of change of course: Controller Output = constant (KD) x change of Error/Time. whereas, KD– Counter rudder time constant (Calibration is done at sea trial to set KD) Determines the amount of Counter Rudder to steady the ship on a set course. Keeps overshoot to a minimum. Greater the ship’s inertia, the greater the setting required. If the ship has good dynamic stability, relatively small settings of the counterrudder will be sufficient. If the ship is unstable, higher settings will be required. Depends on the ship’s characteristics, loaded/ballast conditions, and rate of turn. A too high setting will bring the ship to set Co slowly and a too low setting allows overshoot. As counter rudder settings increase, counter rudder increases. Permanent Helm or Constant Helm: This is an integral controller. o ▪ In NFU this control is out of action. ▪ ▪ ▪ ▪ ▪ ▪ ▪ • Off-Course Alarm: o ▪ ▪ ▪ • • When a ship has a known imbalance to one side, requiring a certain amount of bias helm (e.g. TT of propeller) manual setting of the approximate bias speed up the effect of the “Automatic Permanent Helm” Calculator, because it started off nearer to its target. Whether the control setting is estimated correctly or left at zero has no effect on the final steering accuracy but only in the time, it takes to reach this heading accuracy. If not used as described above, the permanent helm should be left at ZERO and the automatic permanent helm will function normally. Produces output as long a course error persists. Used when beam winds; the couple formed causing the ship to turn into the wind. Rudder position required to counteract is the permanent helm. Continuous control calibrated from 20 (P) to 20 (S). It gives an alarm if the ship deviates from set course by a predetermined limit. The setting depends on Weather conditions, open/coastal waters. Usually, an Off Course Alarm is fitted on the Autopilot. This can be set for the required amount of degrees. So that if at any time the difference between the actual course and the Autopilot set course is more than the preset degrees, an alarm will warn the officer. There is, however, one limitation that should be noted. In case, the gyrocompass itself begins to wander the Autopilot well steer so as to follow the wandering compass and the Off Course Alarm will not sound. It does not ring unless the difference between the course setting and the gyro heading is more than the preset limit. Speed Control: Usually from log and manual if log fails Rudder Limit: Purpose is to prevent a maneuver more radical than is compatible with: o ▪ ▪ ▪ ▪ • • • Speed loss; Comfort on the ship; Safety of ship; Rudder angle greater than 15 to 20 deg does not improve course alteration but result in excessive speed loss. ▪ This control limits the number of degrees of the helm that can be applied by an auto-pilot computer in any mode. ▪ Limits are: 5, 10, 15 and 20 degrees Synchronization Control: This control temporarily disconnects gyro repeater from the main gyro for sync of heading. Required for sync and when gyro switched off and restarted. Auto-pilot/ Follow-up/ Non-follow up: For choosing steering mode Dimmer: For the illumination of the panel Yaw Control: This setting depends on wind and weather conditions and their effect on the course keeping ability of the ship. In a bad weather Yaw Control should be set • • at high and calm weather this should be set low. If Yaw Control is not set properly, the steering gear will overwork & there will be an excessive load on the system. Course Selector Knob: For setting the course to be steered. Auto-pilot/ Follow-up/ Non-follow up: For choosing steering mode Precautions Regularly check for following: • • • • • The Gyro repeater is synchronised with the master repeater. The setting of the controls are optimum and adjust if required, for: o off-course alarm; o try out hand steering and emergency steering once every watch In close- quarter situation, do not use Auto pilot; Maintenance should be carried out as per manual; Auto-pilot is a course keeper and cannot replace Helmsman. It should not be used when in: o Narrow Channel; o At slow speed; o During manoeuvring; o Pilotage; o Heavy Traffic; o Heavy weather; o While carrying out a large alteration of course; o In poor visibility Changing over from Hand Steering to Auto Steering Before changing over from hand steering to auto steering, the settings on the auto pilot panel must be adjusted for weather and traffic conditions. The vessel must be made steady on the course on which she has to be set on auto steering. Changing over to Emergency Steering System • • • • • When the steering panel gives an alarm, it must be read carefully to see as to what has gone out of order, operation must be changed-over to the other/ alternative steering gear/ motor or transmission system/ tele-motor, engine room must be informed immediately. If the Auto-pilot gives an alarm or the off-course alarm goes off, adjust the settings on the Auto-pilot panel accordingly. If the Auto-pilot fails, change-over to hand steering. If the Follow-up system doesn’t work (the feedback leg of the steering gears doesn’t function properly), change-over to Non-Follow-Up mode. If the steering transmission systems or tele-motors stop working, emergency steering has to be performed by trick-wheel arrangement or solenoids after bringing the rudder mid-ships. Further, if the steering hydraulic or electric motors also stop working, rudder will have to turned by some mechanical arrangement like chains and blocks, this is not possible in case of large rudders (large ships). As the last resort, Jury rudder is used, which means some arrangement/ structural changes, which over-side work as an • alternative rudder arrangement e.g. wooden planks on the stern turned/ rotated like a rudder. Changing over (handing over/ taking over) of a watch between the OOWs whether at sea or at anchor is done in compliance with the ISM checklists onboard which, in general, include the following : Use of the Auto Pilot • • • • The master shall ensure that an automatic pilot, where fitted, shall not be used in area of high traffic density, in conditions of restricted visibility nor in any other hazardous navigational situation unless it is possible to establish manual control of the ship’s steering within 30 seconds. Before entering any area of high traffic density, and whenever visibility is likely to become restricted or some other hazardous navigational situation is likely to arise, the master shall arrange, where practicable, for the officer of the watch to have available without delay the services of a qualified helmsman who shall be ready at all times to take over the manual steering. The change-over form automatic to manual steering and vice versa shall be made by, or under the supervision of, the officer of the watch, or, if there is no such officer, the master. The master shall ensure that the manual steering gear is tested o ▪ ▪ • after continuous use of the automatic pilot for 24 hours and before entering any areas where navigation demands special caution. Operations of Steering Gear: In areas where navigation demands special caution, the master shall ensure that the ship shall have more than one steering gear power unit in operation when such units are available and capable of simultaneous operation. IMO Performance Standards for Auto Pilots (Heading Control Systems) Table of Contents • • • • Objectives Functional Requirements o Adaption to steering characteristics and environmental conditions o Performing Turns o Rudder Angle Limitation o Permitted Yaw o Preset Heading o Limiting of Overshoot Change over from Automatic to Manual Steering and vice-versa Change-over from Track Control to Heading Control • • • Alarms and Signalling Facilities o Failure or reduction in power o Off-heading Alarm o Heading Monitor o Indication of Heading Source o Sensor Status Controls Interfacing Objectives • • • Within limits related to the ships’s manoeuvrability the heading control system, in conjunction with its source of heading information, should enable a ship to keep a preset heading with minimum operation of the ship’s steering gear. A heading control system may work together with a track control system adjusting its heading for drift. A tum rate control for performing turns may be provided. Functional Requirements Adaption to steering characteristics and environmental conditions The heading control system should be capable of adapting manually or automatically to different steering characteristics of the ship under various speed, weather and loading conditions, and provide reliable operation under prevailing environment and normal operational conditions. Performing Turns The heading control system should be able to perform turns, within the turning capability of the ship, based either on a preset turning radius or a preset rate of tum. Rudder Angle Limitation Means should be incorporated in the equipment to enable rudder angle limitation in the automatic mode. Means should also be available to indicate when the angle of limitation has been commanded or reached. When other means of directional control are used the requirements of this section should appropriately apply. Permitted Yaw Means should be incorporated to prevent unnecessary activation of the rudder due to normal yaw motion. Preset Heading Any alteration of the preset heading should not be possible without intended action of the ship’s personnel. Limiting of Overshoot The heading control system should change to a preset heading without significant overshoot. Change over from Automatic to Manual Steering and vice-versa • • • • • Change-over from automatic to manual steering and vice-versa should be possible at any position of the rudder and should be effected by one manual control within 3 seconds. Change-over from automatic to manual steering should be possible under any conditions including any failure in the automatic control system. When changing over from manual to automatic steering the heading control system shall take over the actual heading as the preset heading. There should be a single change-over control which should be located in such a position that it is easily accessible to the officer of the watch. Adequate indication should be provided to show which method of steering is in operation. Change-over from Track Control to Heading Control • • If the heading control system works as part of a track control system, then when switching from track control to heading control, the actual heading should be taken as the preset heading. Any switching back to track control shall not be possible without intended action of the ship’s personnel. Alarms and Signalling Facilities Failure or reduction in power An alarm both audible with mute function and visual should be provided in order to indicate failure or a reduction in the power supply to the heading control system or heading monitor, which would affect the safe operation of the equipment. Off-heading Alarm An off-heading alarm, both audible with mute function and visual should be provided when the actual heading deviates from the preset heading beyond a preset limit. Heading Monitor • • If the ship is required to carry two independent compasses, a heading monitor should be provided to monitor the actual heading information by independent heading sources. The heading monitor is not required to be an integrated part of the heading control system. An alarm both audible with mute function and visual should be provided when the heading information in use deviates from the second heading source beyond a preset limit. Indication of Heading Source A clear indication of the actual heading source should be provided. Sensor Status • • The heading control system should provide an indication when any input from external sensors used for control is absent. The heading control system should also repeat any alarm on the status messages concerning the quality of the input data from its external sensors when they are used for control. Controls • • • • • • The number of operational controls should be such that easy and safe operation can be achieved. The controls should be designed to preclude inadvertent operation. Unless features for automatic adjustment are incorporated in the installation, the heading control system should be provided with adequate controls to adjust to effects due to weather and the ship’s steering performance. The heading control system should be designed in such a way as to ensure altering the pre-set heading to starboard by turning the heading setting control clockwise or tilting it to the right-hand side. Normal alterations of heading should be possible by one adjustment only of the preset heading control. Where remote control stations are provided, facilities for the delegation of control to the remote station and unconditional return of control should be incorporated in the master station. Except for the preset heading setting control, the actuation of any other control should not significantly affect the heading of the ship. Additional controls at remote positions should comply with the provisions of this performance standard. Interfacing • • • The heading control system should be connected to a suitable source of heading information. The heading control system should be connected to a suitable source of speed information when it is used in a turning radius mode or when any control parameters are automatically adapted to speed. If a heading control system is capable of digital serial communication with the ship’s navigation system then the interface facilities should comply with the relevant international marine interface standards.”