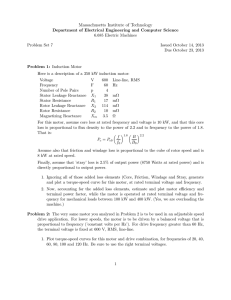
15EE210L-ELECTRICAL MACHINES LAB-II RECORD ACADEMIC YEAR: ODD SEMESTER 2018-19 NAME : REG.NO. : DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERING FACULTY OF ENGINEERING & TECHNOLOGY SRM Institute of Science and Technology (Deemed to be University) S.R.M. NAGAR, KATTANKULATHUR – 603 203 KANCHEEPURAM DISTRICT SRM Institute of Science and Technology (Deemed to be University) S.R.M. NAGAR, KATTANKULATHUR -603 203 KANCHEEPURAM DISTRICT BONAFIDE CERTIFICATE Register No______________________________ Certified to be the bonafide record of work done by ________________________ of EEE department, B.Tech degree course in the Practical 15EE210L Electrical machines Lab-II in SRM IST, Kattankulathur during the academic year 2017-2018. Lab in-charge Date: Submitted Year Co-ordinator for end semester examination held Electrical machines Lab, SRM IST, Kattankulathur. Date: Examiner-1 Examiner-2 in LIST OF EXPERIMENTS 1. Performance evaluation of single phase induction motor 2. a) Performance evaluation of three phase induction motor b) Load test on three phase squirrel cage induction motor using open lab system 3. Speed control of rotating transformer 4. Synchronisation of alternator to infinite bus bar 5. Predetermination of voltage regulation 6. Determination of v and inverted v curves of synchronous motor 7. Determination of xd and xq for salient pole alternator using slip test 8. Characteristics of 3 phase induction generator 9. Single phasing in 3 phase induction motor 10. Armature reaction in synchronous generator INDEX Expe rime nt No 1 Date of Experi ment Title of Experiment Viva (10) Executi on (10) Calculation / Evaluation (20) Performance evaluation of single phase induction motor a) Performance evaluation 2 (a) of three phase induction motor b) Load test on three phase 2(b) squirrel cage induction motor using open lab system 3 4 5 Speed control of rotating transformer Synchronisation of alternator to infinite bus bar Predetermination of voltage regulation Determination of v and 6 inverted v curves of synchronous motor Determination of xd and xq 7 for salient pole alternator using slip test 8 9 10 Characteristics of 3 phase induction generator Single phasing in 3 phase induction motor Armature reaction in synchronous generator Average Pre and Post Lab (10) Total (50) Faculty Signatu re PERFORMANCE EVALUATION OF SINGLE PHASE INDUCTION MOTOR PRE LAB QUESTIONS 1. What are the types of single phase induction motor? 2. Why single phase induction motors are not self-starting? 3. How the direction of a capacitor start Induction motor is be reversed? 4. In what respect does a 1-phase Induction motor differ from a 3-phase Induction motor? 5. What is the rating of single phase machines? State its applications Experiment No. PERFORMANCE EVALUATION OF SINGLE PHASE INDUCTION MOTOR AIM To conduct open circuit, short circuit and load test on the given single phase induction motor and to plot its performance characteristics. APPARATUS REQUIRED: S.NO 1 APPARATUS VOLTMETER 2 AMMETER 3 WATTMETER 4 5 TACHOMETER Connecting wires SPECIFICATIONS QUANTITY (0-300V) MI 1 (0-150V) MI 1 (0-10A) MI 1 (0-5A) MI 1 (300V,10A,UPF) 1 (150V,10A, UPF) 1 (300V,5A,LPF) 1 (0-10000 RPM) 1 As required FORMULAE Load test 1. Circumference of the brake drum = 2πR (m) R = Radius of the brake drum 2. Input power =W (watts) W = wattmeter readings 3. Torque (T) = 9.81x R x (S1 ~ S2) (N-m) S1, S2 = spring balance readings (Kg) 2NT (watts) 60 N- Speed in rpm 4. Output power = output power x100 input power W 6. Power factor, cos Φ= VI 5. % Efficiency (η) = 7. % Slip, s = Ns N 100 Ns NS = synchronous speed = 120 f (rpm) P P = no. of poles f=frequency of supply (Hz) No load test R1= 1.5x Rdc cos Ф = Wo / Vo Io VAB = Io xo xo = VAB /Io Blocked rotor test cos Φsc =Wsc /Vsc Isc Zeq = Vsc/ Isc Req = Wsc /( Isc)2 Req = R1 + R2 R2 = Req - R1 = rotor resistance referred to stator Xeq =√(Zeq 2 - Req 2) X1 = X2 X2 Where W0 = no-load input power in watts (watts) Wsc = short circuit input power in watts (watts) V0 = line voltage on no-load I0 = line current on no-load CALCULATIONS TO DRAW THE EQUIVALENT CIRCUIT Blocked rotor test Zeq = Vsc/ Isc Req = Wsc /( Isc)2 Xeq =√(Zeq 2 - Req 2) R1= 1.5*Rdc Req = R1 + R2 R2 = Req - R1 Xeq=X1 + X2 X1 = X2 x2 = X2 / 2 r2= R2 / 2 Where VSC= Short circuit voltage volts ISC= Short circuit current in amps WSC= Short circuit power in watts No load test VAB = Io xo xo = | | Where W0 = no-load input power in watts (watts) V0 = line voltage on no-load I0 = line current on no-load PRECAUTIONS Load test 1. The auto transformer must kept at minimum voltage position. 2. The motor is started at no load condition. 3. The motor should not be stopped under loaded condition No load test 1. Initially DPST Switch is kept open. 2. Auto transformer is kept at minimum potential position. 3. The machines must be started on no load. Blocked rotor test 1. Initially the DPST Switch is kept open. 2. Auto transformer is kept at minimum potential position. 3. The machine must be started at full load (blocked rotor). MODEL EQUIVALENT CIRCUIT MODEL GRAPH TABULAR COLUMN No load test V0 I0 (volts) (amps) W0 (watts) MF OBS ACT Load test Voltage Current Speed V I N (volts ) Amps (rpm) Wattmeter reading (watts) Spring balance readings (Kg) S1 S2 S1~S2 Torque (T) N-m OBS ACT Blocked rotor test VSC ISC (volts) (amps) WSC (watts) MF OBS ACT Output Power (watts) Power factor (cos Φ) % efficiency (η) %Slip(s) CIRCUIT DIAGRAM 300V, 10A, UPF (0-10)A MI Fuse A P 230V, 50Hz 1 AC Supply S W I T C H 15A L C V M1 Auto Transformer 230/(0-270) V D P S T M V C S1 S2 Kg Kg (0-300)V MI M2 Rotor Brake Drum N Link S1 S2 FUSE RATING: NAME PLATE DETAILS: 125% of rated current Rated Voltage Rated Current Rated Power Rated Speed 125 x 9.5 ---------------100 = 15 A : : : : 220V 9.5A 3HP 1470 RPM S1, S2- AUXILLARY WINDING M1, M2- MAIN WINDING PROCEDURE Load test 1. Connections are given as per the circuit diagram 2. The DPST switch is closed and the single phase supply is given to the motor. 3. By adjusting the autotransformer, the rated voltage is applied and the corresponding no load values of speed, spring balance and meter readings are noted down. If the wattmeter readings show negative deflection on no load, switch of the supply & interchange the terminals of current coils (M & L) of the wattmeter. Now, again start the motor (follow above procedure for starting), take readings. 4. The procedure is repeated till rated current of the motor is reached. 5. The motor is unloaded, the auto transformer is brought to the minimum voltage position, and the DPST switch is opened. 6. The radius of the brake drum is measured. No load test 1. Connections are given as per the circuit diagram. 2. The motor is kept at no load condition. 3. The DPST switch is closed 4. By adjusting the 1Φ auto transformer the machine is brought to rated voltage. 5. The ammeter, voltmeter and wattmeter readings are noted down. Blocked rotor test 1. Connections are given as per the circuit diagram. 2. The rotor is made standstill (held tight) by applying Load to the motor. 3. Close the DPST switch. 4. By adjusting the 1Φ auto transformer rated current is allowed to circulate. 5. The ammeter, voltmeter and wattmeter readings are noted down. RESULT POST LAB QUESTIONS 1. What are the inherent characteristics of plain 1-Ø Induction motor? 2. Why single phase induction motor has low power factor? 3. State double field revolving theory. 4. How the direction of a capacitor start Induction motor is reversed? 5. Why is the starting torque of a capacitor start induction motor high, when compared to that of a split phase induction motor? PERFORMANCE EVALUATION OF THREE PHASE INDUCTION MOTOR PRELAB QUESTIONS 1. What is slip of an induction motor? 2. An induction motor is generally analogous to__________________ 3. What are the operating modes of 3-φ induction motor? 4. State the advantages of skewing? 5. How can the direction of rotation of the 3-φ induction motor be reversed? PERFORMANCE EVALUATION OF THREE PHASE INDUCTION MOTOR AIM To conduct open circuit, short circuit and load test on the given three phase induction motor squirrel cage induction motor and to plot its performance characteristics. APPARATUS REQUIRED SI.NO 1 APPARATUS VOLTMETER 2 AMMETER 3 WATTMETER 4 TACHOMETER SPECIFICATIONS (0-600V) MI (0-300V)MI (0-10A) MI (0-5A) MI (600V,10A,UPF) (600V,5A,LPF) (0-10000 RPM) FORMULAE Load test 1. circumference of the brake drum = 2πR (m) R = Radius of the brake drum 2. Input power W=W1+W2 (watts) W1, W2 = wattmeter readings 3. Torque (T) = 9.81* R * (S1 ~ S2) (N-m) S1, S2 = spring balance readings (Kg) 2NT 4. Output power = (watts) 60 output power x100 5. % Efficiency (η) = input power W W2 6. Power factor, Cos Φ = 1 3 VI Cos Φ= Power factor 7. %Slip, s = Ns N 100 Ns NS = synchronous speed = P = no. of poles f=frequency of supply (Hz) 120 f (rpm) P QUANTITY 1 1 1 1 2 2 1 No load test W0 Cos Φ0 = 3 V0 I 0 Where W0 = no-load input power in watts (watts) V0 = line voltage on no-load I0 = line current on no-load Iw= Io Cos Φ0 Ro= V0 ( ph ) Iw = Amps V0 3 Iw Iµ= Io Sin Φ0 V0( ph) Xo= I Amps V0 = Ω 3 I Ω Blocked rotor test ISN = I SC V VSC I WSN= Wsc SN I SC 2 (watts) WSC Cos Φsc = 3 Vsc Isc X01= Z 01 R01 () 2 R2’ = R01/ 2 RL’ = R2’ 1 s s 2 Ω Ω Where Wsc = short circuit input power in watts (watts) Iw= Working current in amps Iµ= Magnetizing current in amps X0= No load reactance in Ω VSC= Short circuit voltage volts ISC= Short circuit current in amps WSC= Short circuit power in watts ISC=Line Current under blocked rotor condition for short circuit voltage ISN=Line Current under blocked rotor condition for rated voltage s= 5% (Assume PRECAUTIONS Load test 1. The auto transformer is kept at minimum voltage position. 2. The motor is started at no load condition. 3. The motor should not be stopped under loaded condition PROCEDURE Load test 1. 2. 3. 4. 5. Connections are given as per the circuit diagram The TPST switch is closed and the 3-phase supply is given The motor is started with a Direct On-line (DOL) starter. No load readings are noted down. If any one of the wattmeter shows negative deflection, the connections of M and L in the wattmeter are interchanged after switching off the supply. 6. Gradually the motor is loaded and in each case all the meter readings are noted down and the procedure is repeated till the rated current is obtained. 7. The motor is unloaded. The DOL Starter is switched off and the TPST Switch is opened. 8. The radius of the brake drum is measured. No load test 1. 2. 3. 4. 5. Connections are given as per the circuit diagram Initially the motor is kept at no load condition. The TPST switch is closed By adjusting the 3Φ auto transformer the machine is brought to rated voltage. The ammeter, voltmeter and wattmeter readings are noted down. Blocked rotor test 1. 2. 3. 4. 5. Connections are given as per the circuit diagram The rotor is made standstill (held tight) by applying Load to the motor. Close the TPST switch. By adjusting the 3Φ auto transformer rated current is allowed to circulate. The ammeter, voltmeter and wattmeter readings are noted down. CIRCUIT DIAGRAM 300V, 10A, UPF 300V, 10A, UPF FUSE CALCULATION: 1.25x4.5= 10A TABULAR COLUMN Load test V volts I Amps Speed N (rpm) Wattmeter reading (Watts) W1 W2 W1+W2 Obs Act Obs Act Spring balance Torque readings (Kg) (T) N-m S1 S2 S1~S2 Output power (Watts) Power factor (cos Φ) % efficien cy (η) % Slip (s) No load test V0 I0 (volts) (amps) W1 (watts) W2 (watts) W0 (watts) W1 (watts) W2 (watts) WSC (watts) Blocked rotor test VSC ISC (volts) (amps) MODEL GRAPH EQUIVALENT CIRCUIT R01 I1’ P X01 ’ Io RL’= V1 Ro N Xo 𝑅2 (1/𝑠−1) 𝐾2 CIRCLE DIAGRAM PROCEDURE FOR CONSTRUCTION OF CIRCLE DIAGRAM By using the data obtained from the no load test and the blocked rotor test, the circle diagram can be drawn using the following steps: 1. Take reference phasor V as vertical (Y-axis) 2. Select suitable current scale such that diameter of circle is 20-30cm. 3. From No load test, I0 and 0 are obtained. Draw vector I0, lagging V by angle 0. This is line OA 4. Draw horizontal line through extremity of I0 i.e., A parallel to horizontal axis. 5. Draw the current ISN calculated from ISC with the same scale, lagging V by angle SC, from origion O. This is phasor OB. 6. Join AB. The line AB is called output line. 7. Draw a perpendicular bisector to AB Extend it to meet line AD at point C. This is the centre of the circle. 8. Draw the circle with C as a centre and radius equal to AC. This meets the horizontal line drawn from A at B. 9. Draw the perpendicular from point B on the horizontal axis to meet AF line at D and meet horizontal axis at E. 10. Torque line: The torque line separates stator and rotor copper losses. The vertical distance BD represents power input at short circuit i.e., WSN which consist of core loss, stator and rotor copper losses. FD = DE = fixed loss AF sum of stator & rotor copper losses. Pt ‘G’ is located as BG Rotor copper loss GD Stator copper loss The line AG in called torque line Power Scale: As AD represents WSN i.e., power input on short circuit at normal voltage, the power scale can be obtained as WSN Power scale = W / cm ( BE ) (BE) = Distance BE in cm Location of point E (slip ring induction motor) I K = 1 = transformation ratio I2 AE Rotor copper loss I 22 R2 R2 I 2 EF stator copper loss I 12 R1 R1 I 1 R21 2 R2 = Rotor resistance referred to stator. K2 BG R 21 GD R1 Thus pt G can be obtained by dividing the line BD in the ratio R2' R1 Location of point D (squirrel cage induction motor) In a squirrel cage motor, the stator resistance can be measured by conducting resistance test. 2 i.e., Stator copper loss = 3I SN R1 where I SN is phase value. Neglecting core loss, WSN = stator Cu loss + Rotor Cu loss 2 i.e., Rotor copper loss = WSN 3I SN R1 BG WSN 3 2SN R1 2 GD 3I SN R1 Dividing line BD in this ratio, the point G can be obtained and hence AG represents torque line. To get the torque line, join the points A and G. 11. 12. To find the full load quantities, draw line BK (=Full load output/power scale). Now, draw line PK parallel to output line meeting the circle at point P. Draw line PT parallel to Y-axis meeting output line at Q, torque line at R, constant loss line at S and X-axis at T. RESULT LOAD TEST ON THREE PHASE SQUIRREL CAGE INDUCTION MOTOR USING OPEN LAB SYSTEM AIM To conduct load test on three phase squirrel cage Induction motor, 2 pole, 24 V, ∆Connection. APPARATUS REQUIRED SL NO 1 2 COMPONENT 3 phase cage rotor Supply module MODULE Open lab sys DL 10281 3 Measurement module DL 10282 4 Electromagnetic brake DL 10300A SPECIFICATION 24 V/5A AC (2pole) Fixed 24 V/5A AC Variable 42 V/5A AC voltmeter (0-50)V AC ammeter (0-5)A Wattmeter 75V/10A/300WUPF Speed sensor G=3.5N,g=1.5N QUANTITY 1 1 1 1 1 2 1 1 PRECAUTIONS 1. In the supply module DL10281,select the selector switch‛I’ to position‛ b’ for fixed AC supply 42/10A and switch L1/L2/L3 to position ‛0’. 2. In the supply module DL10281,select the selector switch‛ IV’ to position ‛c’ for variable DC voltage and control knob to 0%. 3. In the measurement module 10282,ensure the ammeter and voltmeter for AC measurements. FORMULAE INPUT POWER Pin = P1+P2 Watts OUTPUT POWER Pout = 0.1047nM Watts TORQUE M = G.b Nm POWER FACTOR COS ɸ = Pin/√3 U I EFFICIENCY % Ƞ = Pout/Pin × 100 Where, U = supply voltage in volts I = load current in Amps n = speed of cage rotor in Rpm M = torque in Nm G = measuring weight b = distance of the arm in m TABULAR COLUMN U(V) I P1(W1) P2(W2) (A) act obs act obs CIRCUIT DIAGRAM Pin (W) COSɸ G (N) b(m) M (Nm) n (Rpm) Pout(W) %Ƞ MODEL GRAPH PROCEDURE 1. Activate the supply modue by setting the switch L1/L2/L3 from position‛ 0’ to‛ 1’. 2. Observe whether the motor runs in CW direction. 3. If not interchange any two phases. 4. Balance the brake by moving the balance weight ‛g’ until the water level shows horizontal position and the speed measurement reads rated speed. 5. Now note down the No load measurements (U,I,P1,P2,n,G,b) 6. The motor is therefore loaded in steps by means of brake. (The load is increased by moving the weight‛ g’ to a distance‛ b’ from the No load initial position. Adjust the selector switch‛ IV’ to balance the system again) 7. Perform the measurements as per previous step and repeat the procedure until rated current. 8. Stop the system by setting the load voltage switch L1/L2/L3 to a position to de-energize the brake. RESULT POST LAB QUESTIONS 1. What is the need for drawing a circle diagram? 2. How to calculate the power scale for drawing a circle diagram? 3. What are the advantages and disadvantages of circle diagram method of predetermining the performance of 3 –phase IM? 4. What are the effects of increasing rotor resistance on starting current and starting torque? 5. Draw the torque slip characteristics of 3 phase slip ring induction motor. SPEED CONTROL OF ROTATING TRANSFORMER PRELAB QUESTIONS 1. Why is an induction motor not capable of running at synchronous speed? 2. What are the different starters needed for three phase induction motors? 3. The rotor core loss of an induction motor under running condition is usually neglected. Why? 4. Why are starters needed for induction motors? 4. What are the various methods of speed control of 3 phase induction motor? 5. What are the various methods of speed control of induction motor from the stator side? ROTOR RESISTANCE SPEED CONTROL METHOD OF 3ϕ SLIP RING INDUCTION MOTOR AIM To vary the speed of the slip ring induction motor using rotor resistance speed control method. APPARATUS REQUIRED SI.NO 1 2 3 APPARATUS Voltmeter Ammeter Tachometer SPECIFICATIONS (0-600V) MI (0-10A) MI 0-10000 (rpm) QUANTITY 1 1 1 TABULAR COLUMN Voltage (V) Current (A) Resistance () Speed (rpm) CIRCUIT DIAGRAM: ROTOR RHEOSTAT SPEED CONTROL OF 3ϕ SLIP RING INDUCTION MOTOR MODEL GRAPH 1480 1460 1440 1420 1400 1380 1360 1340 1430 1440 1450 1460 5. 88 12 .1 2 21 .8 32 .2 46 .6 (W Re sis ta nc e 1470 Speed (rpm) 1390 ) speed(rpm) Speed vs resistance resistance(ohm) PROCEDURE 1. 2. 3. 4. RESULT The Connection are made as per circuit diagram The TPST switch is closed and three phase supply is given. The motor is started with rotor connected with rotor resistance. The rotor resistance is varied and corresponding values of speed, voltage and current are noted down. VARIBALE FREQUENCY AND VOLTAGE SPEED CONTROL METHOD AIM To control the speed of the 3 phase induction motor by changing the supply frequency and to plot the speed Vs frequency curve. APPARATUS SI.NO 1 2 3 4 5 APPARATUS Voltmeter Ammeter Tachometer Frequency meter Digital . Rheostat Wire Wound SPECIFICATIONS (0-600V) MI (0-10A) MI (0-2)A MC 0-10000 (rpm) (0-60Hz) 300Ω, 1.2A PRECAUTIONS i) TPST in open position ii) DPST1 and DPST2 in open position iii) Motor field rheostat in minimum position iv) Potential divider in minimum voltage position v) Autotransformer at minimum voltage position TABULATION Induction motor on no load Line voltage In volts Frequency In Hz Speed of IM In rpm QUANTITY 2 1 1 1 1 2 CIRCUIT DIAGRAM Fuse calculation: 125% of Rated current=1.25*19=30A NAME PLATE DETAILS: Motor Rated Voltage Rated Current Rated Power Rated Speed : : : : 220V 19A 3HP 1500 RPM Alternator 415V 4.2A 5KVA 1500 RPM MODEL GRAPH PROCEDURE 1. Make the connections as shown in diagram. 2. Switch on the DC supply to the DC motor by closing the switch DPST1. Start the DC shunt motor using 3-point starter. Adjust the field rheostat of the alternator and bring it to rated speed.(1500rpm). 3. Now, dc supply is given to the alternator field winding and adjust the potential divider so that the generated voltage is rated value (410V). 4. Close the TPST switch. Increase the autotransformer. Induction motor starts running on no load. Apply rated voltage by adjusting autotransformer. Note down the frequency, voltage and speed of the induction motor. Now, decrease the frequency. Decrease the voltage and frequency in proportion and note down the frequency, voltage and speed of the induction motor each time. This procedure is continued till frequency decreases to 48Hz.Switch off the supply after bringing the motor to noload. RESULT POSTLAB QUESTIONS 1. What does happen to the induction motor if supply frequency is reduced keeping the supply voltage constant? 2. Write down the main feature of v/f control? 3. Name some applications of speed control of induction motor? 4. Why external resistance is added in slip ring induction motor? 5. When does the induction motor behave as induction generator? 6. What is single phasing in induction motor? Experiment No. SYNCHRONISATION OF ALTERNATOR TO INFINITE BUSBAR AIM To synchronize the 3Φ alternator to the infinite bus bar. APPARATUS REQUIRED SI.NO APPARATUS 1 VOLTMETER 2 AMMETERS RHEOSTAT 3 SYNCHRONISING LAMPS SPECIFICATIONS (0-600V) MI (0-2A) MC 300Ω,1.2A 350Ω,2A 230V,15A QUANTITY 2 1 1 1 6 PROCEDURE 1) The DPST-1 is closed and the motor field rheostat is adjusted to make the alternator run at rated speed. 2) The DPST-2 is closed and by keeping the TPST open, adjusts the alternator field rheostat to supply the voltage equal to infinite bus bar. 3) The phase sequence of the alternator is made as same as that of the infinite bus bar by observing the sequence of glowing of synchronizing lamps. If the phase sequence is not same, any of the two phases are interchanged. 4) The field rheostat is adjusted to bring the frequency of the alternator to same frequency of infinite bus bar. When the phase sequence of the two sides are same all the lamps will begin to glow bright and dark simultaneously. In this condition, when the frequencies are equal, the variation of lamps bright to dark is lowest. 5) At the dimmest point the TPST switch is closed thereby synchronizing the alternator to the bus bar. CIRCUIT DIAGRAM: SYNCHRONISATION OF ALTERNATOR TO INFINITE BUSBAR RESULT POSTLAB QUESTIONS 1. Three lights flashing rapidly in unison while paralleling alternators means that ________________________ 2. Advantage of paralleling of two machines? 3. How can the voltage and frequency be adjusted? 4. When the pointer of a synchroscope is stationary and points upward during the paralleling operation, the __________________________ 5. List the factors that affect the load sharing in parallel operating generators? 6. What is the possible effect of wrong synchronization? PREDETERMINATION OF VOLTAGE REGULATION PRELAB QUESTIONS 1. Define the term voltage regulation of alternator. 2. What is the necessity for predetermination of voltage regulation? 3. Name the various methods for predetermining the voltage regulation of 3-phase Alternator. 4. What are the causes of changes in terminal voltage of Alternators when loaded? 5. What is meant by armature reaction? PREDETERMINATION OF VOLTAGE REGULATION AIM To predetermine the regulation of alternator by EMF, MMF and ZPF methods APPARATUS REQUIRED SI.NO 1 2 3 4 5 APPARATUS VOLTMETER AMMETER RHEOSTAT TACHOMETER REACTIVE LOAD SPECIFICATIONS (0-600V) MI (0-5A) MI 300Ω,1.2A (0-10000 RPM) (1-15) amps QUANTITY 2 1 1 1 1 FORMULAE EMF method Synchronous impedance, Zs = OC voltage/ phase (at constant If) SCcurrent / phase Synchronous reactance, Xs = Zs 2 Rac 2 () Where Rac = armature resistance For rated conditions, EMF, E0 = (Vph cos IRa ) 2 (Vph sin IXs ) 2 + corresponds to lagging power factor - corresponds to leading power factor % Regulation = E 0 Vph x100 Vph MMF method If1 = field current corresponding to Isc E = Vph + IRa cosΦ If2 = field current corresponding to E from graph If0 = ( If 12 If 2 2 2If 1 If 2 cos(180 (90 )) E0 = open circuit voltage corresponding to If0 (from graph) % Regulation = E 0 Vph x100 Vph ZPF method EMF, E1 = (Vph cos IRa ) 2 (Vph sin IX L ) 2 + corresponds to lagging power factor - corresponds to leading power factor IXL = RS (from graph) If2 = PS (from graph) If1 = field current corresponding to E1 (from graph) If0 = ( If 12 If 2 2 2If 1 If 2 cos(180 (90 )) E0 = open circuit voltage corresponding to If0 (from graph) % Regulation = E 0 Vph x100 Vph PRECAUTION 1. The Motor field rheostat is kept at minimum resistance position. 2. The Generator field rheostat should be kept at maximum resistance position. OC TEST FIELD CURRENT(If) (amps) LINE VOLTAGE(VL) (volts) PHASE VOLTAGE (Vph)(volts) CIRCUIT DIAGRAM SC TEST FIELD CURRENT(If) (amps) S.C.CURRENT (ISC)(amps) ZPF TEST If(amps) VZPF(VOLTS) ISC(amps) VOLTAGE REGULATION EMF method COS Ø E0(volts) LAG LEAD % regulation LAG LEAD Unity MMF method cos Ø E0(volts) LAG 0.8 Unity LEAD % regulation LAG LEAD ZPF method COS Ø E0(volts) LAG 0.8 Unity MODEL GRAPH MMF method ZPF method LEAD % regulation LAG LEAD PROCEDURE OC test 1. 2. 3. 4. 5. 6. Connections are given as per the circuit diagram The TPST switch of the alternator is kept opened. The DPST-1 switch is closed The motor field rheostat is varied such that the alternator runs at rated speed. The DPST-2 switch is closed. The Generator field rheostat is varied in step and the readings of If and V are noted, till 125% of the rated voltage is obtained. 1. 2. 3. 4. 5. 6. Connections are given as per the circuit diagram The DPST-1 switch is closed The motor field rheostat is varied such that the alternator runs at rated speed. The TPST switch is closed. The DPST-2 switch is closed. The Generator field rheostat is varied to bring rated current of alternator and the corresponding If is noted. SC test ZPF test (All the quantities are in per phase value) 1. Draw the Open Circuit Characteristics (Generated Voltage per phase VS Field Current) 2. Mark the point A at X-axis, which is obtained from short circuit test with full load armature current. 3. From the ZPF test, mark the point P for the field current to the corresponding rated armature current and the rated voltage. 4. Draw the ZPF curve which passing through the point A and P in such a way parallel to the open circuit characteristics curve. 5. Draw the tangent for the OCC curve from the origin (i.e.) air gap line. 6. Draw the line PX from P towards Y-axis, which is parallel and equal to OA. 7. Draw the parallel line for the tangent from R to the OCC curve. 8. Join the points R and S also drop the perpendicular line PX, where the line RS represents armature leakage reactance drop (IXL) PS represents armature reaction excitation (Ifa). RESULT POST LAB QUESTIONS 1. Why it is called as zero power factor method? 2. Why ZPF is called most accurate method? 3. Why the field rheostat is adjusted such that the voltmeter reads 380V. 4. Why voltage regulation on alternator is negative for leading power factor? 5. What are the advantages and disadvantages of estimating the voltage regulation of an Alternator by EMF method? DETERMINATION OF V AND INVERTED V CURVES OF SYNCHRONOUS MOTOR PRELAB QUESTIONS 1. Why synchronous motor is not self starting? 2. Why a synchronous motor is a constant speed motor? 3. State the characteristic features of synchronous motor. 4. Name the methods of starting a synchronous motors Experiment No. DETERMINATION OF V AND INVERTED V CURVES OF SYNCHRONOUS MOTOR AIM To determine the V and inverted V curve of synchronous motor APPARATUS REQUIRED SI.NO 1 2 3 4 APPARATUS VOLTMETER AMMETERS SPECIFICATIONS (0-600V) MI (0-2A) MC (0-10A)MI 300Ω,1.2A 600V,10A,UPF RHEOSTAT WATTMETER QUANTITY 1 1 1 1 2 FORMULAE W W2 Φ = cos tan 1 3 1 W W 2 1 Where W1 = wattmeter reading 1 W2 = wattmeter reading 1 PRECAUTION 1. The VARIAC is kept at minimum position. 2. The potentiometer should be kept at minimum voltage position. TABULAR COLUMN Ia Amps If Amps V Volts W1(watts) OBS ACT W2(watts) W1+W2(watts) OBS ACT COSΦ CIRCUIT DIAGRAM MODEL GRAPH PROCEDURE 1. Connections are as per the circuit diagram 2. The TPST switch is closed. 3. By varying auto synchronous motor starter the voltage is adjusted to 30-40% of rated voltage. 4. Close the DPST switch. 5. Adjusted the rheostat and bring for rated current. 6. Now the Voltmeter is adjusted for rated voltage values. 7. The values of If1, W1 and W2 are noted down. 8. By adjusting the rheostat below rated current the corresponding reading are noted down. 9. At some point the value of Ia will increase and the above procedure is repeated till the rated value of current. 10. If any wattmeter shows negative deflection, change the current coil terminals of wattmeter. RESULT POSTLAB QUESTIONS 1. How synchronous machine does behave in under excitation? 2. What is synchronous capacitor? 3. Distinguish between synchronous phase modifier and synchronous condenser. 4. Mention four applications of synchronous motor? 5. Define pull in torque in synchronous motor . . DETERMINATION OF Xd AND Xq FOR SALIENT POLE ALTERNATOR USING SLIP TEST PRELAB QUESTIONS 1. What are the two types of alternators? 2. Compare salient pole and Non salient pole rotor. SALIENT POLE ROTOR NON SALIENT POLE ROTOR (Smooth cylindrical type ) 3. What is meant by two reaction theory? 4. What is direct and quadrature axis reactance? 5. What are the normal values of Xq/Xd for the two types of syn. Machines. Experiment No. DETERMINATION OF Xd AND Xq FOR SALIENT POLE ALTERNATOR USING SLIP TEST AIM To find the direct axis reactance Xd and quadrature axis reactance Xq by conducting slip test. APPARATUS REQUIRED SI.NO 1 2 3 4 APPARATUS VOLTMETER AMMETER RHEOSTAT TACHOMETER SPECIFICATIONS (0-300V) MI (0-5A) MI 300Ω,1.2A (0-10000 RPM) QUANTITY 2 1 1 1 FORMULAE Xd = Maximum armature voltage/phase Minimum armature current/phase Xq = Minimum armature voltage/phase Maximum armature current/phase PRECAUTION 1. The Motor field rheostat should be kept at minimum resistance position PROCEDURE 1. Connections are given as per the circuit diagram 2. The DPST switch is closed 3. The rheostat is varied from the minimum resistance position so as to bring the speed to a value below or near to rated speed of the alternator 4. The TPST switch is closed keeping the variac in the minimum position. 5. The variac is varied to apply 15-20% of the rated voltage of alternator is observed. 6. Check the voltage in the field coil, if it reads high the phase sequence is changed so that the voltmeter reads zero. 7. The maximum and minimum deflections of voltmeter and ammeter are noted. 8. The variac is brought to minimum position and TPST Switch is opened. The field rheostat is brought to minimum position and DPST Switch is opened. CIRCUIT DIAGRAM TABULAR COLUMN VMAX MODEL CALCULATION RESULT VMIN IMAX IMIN POSTLAB QUESTIONS 1) Why does the pointer of ammeter and voltmeter oscillate at slip condition? 2) Which is higher Xd or Xq? Why? 3) Mention some application of synchronous motor 4) Can the slip condition achieved in non salient pole Synchronous machines? Why?