Mech_Eng 362 Stress Analysis
Analysis of Structures
ANALYSIS OF STRUCTURES
Sridhar Krishnaswamy
8-1
Mech_Eng 362 Stress Analysis
Analysis of Structures
8.1 ANALYSIS OF STRUCTURES:
At this point, we have developed an understanding of characterization of internal
forces, geometry of deformation, material response, and how they all fit together. We have
imposed Newton's laws and we also have looked into energy principles. Our toolkit now
includes quite a bit of stuff:
"exact" analytical methods:
using theory of elasticity equations or the
principle of minimum potential energy
"approximate" analytical methods:
using Rayleigh-Ritz approach and the
principle of minimum potential energy
"approximate" numerical methods:
using the finite-element implementation of the
Rayleigh-Ritz approach
In the rest of this course, we are going to look at several structures and analyze them using
any convenient method from our toolkit. When confronted with the design or analysis of a
structure, you should call upon the most appropriate method. If you think that a problem
can be solved as a simple beam, it is ridiculous to seek (and maybe impossible to find) a
tedious "exact" analytical solution using the full power of the theory of elasticity. It is
equally ridiculous to rush over to the nearest computer and start creating a finite element
mesh for the problem. Maybe all that is required is a straightforward Bernoulli-Euler
analysis; or if the beam is a bit complicated because of its shape or has weird support
conditions, maybe a pencil and paper approximate Rayleigh-Ritz technique is called for. In
other situations, it maybe that the finite element approach is essential. Some times you may
want a quick and dirty (very approximate) solution that RR can provide, and then you
might want to follow this up with a more detailed FEM analysis of the structure. You have
to be able to judge what tool to bring to a problem at hand, and you will gain an
appreciation for this we when look at several aspects of structural analysis, and you see
how I handle them.
We have already seen how to handle rods and some beams. Let us pick up on a
variation of a beam problem.
Sridhar Krishnaswamy
8-2
Mech_Eng 362 Stress Analysis
Elastic Supports
Example 1: Beam Simply-Supported at its Ends and Resting on a Spring at its Midpoint
Consider a slender beam as shown above. In addition to the hinges at its ends, the beam is
supported at its middle by a linear elastic spring of spring constant K (N/m). It also carries
a distributed area load of magnitude σo (Nm-2)as shown.
L
σo
x
b
h
z
K
y
y
How would you analyze this structure for deformation and stresses? Right away you might
say that we can try a Bernoulli-Euler analysis of the structure. To calculate the bending
moment at any cross-section, the first thing you do is to get rid of the supports, and put in
the appropriate reactions. The two pins pose no problem to us, but what about the spring?
The force the spring exerts is proportional to its deformation, ie Rsp = Kuy (x = L /2) acting
upwards on the spring, and you might get a queasy feeling that this way lies trouble! Try it
and see what you get.
It turns out that we are better off seeking an approximate Rayleigh-Ritz solution to
this problem as follows.
(i) Bag of Candidate Displacements: Seek a one-parameter sinusoidal bag
πx
uy (x) = a1 sin
0≤x≤L
L
which clearly satisfies the geometric boundary conditions:uy (0) = 0; uy (L) = 0 , and is
smooth enough.
(ii) Calculate the Potential Energy Functional:
In this case, energy can be stored in two places - the beam and the spring (this is how the
spring enters our analysis): U=Ubeam + U spring
U beam
EI
= z
2
=
2
d 2u y
∫x= 0 dx 2 dx
L
π4 EIz 2
a
4L3 1
Sridhar Krishnaswamy
8-3
Mech_Eng 362 Stress Analysis
Elastic Supports
2
1
K {uy (x = L/ 2)}
2
1
= Ka12
2
Uspring =
The virtual work term is:
L
W=
∫ u (x){
y
o
.b.dx }
x=0
2bL o
a1
π
The potential energy functional is therefore:
=
1
π 4EI z 2 2bL
Π = K +
a −
4L3 1
π
2
o
a1
(iii) Minimizing the potential energy functional with respect to a1 yields:
uy (x) =
4bL2
o
4
π EI
π 2KL + 2 z
L
sin
πx
L
Remarks: (i) A simple check of dimensions is useful to ensure that we have not screwed up
the algebra. {Note that KL is a force, and so is EIz/L2 (more on this strange combination
later); these cancel out the force dimension obtained from (σo bL) leaving an L (a length) as
the dimension for the displacement - so, all is well dimensionally speaking!}.
(ii) One can of course improve on the solution using two or more parameters for the RR
function, or else, we can use a multi-part RR function et cetera. For instance, for beams
that are pinned at both x=0 and x=L, a one-parameter polynomial bag can be:
x
x
uy (x) = a1 1 −
L
L
which clearly satisfies the geometric boundary conditions that the displacements are zero at
both pins. If you want practice examples, I suggest that you look at all the examples we
will do in this course, and see if you can come up with suitable one- or two-parameter
polynomial and trigonometric bags of displacements.
(iii) Pay particular attention to how we computed the virtual work term for a distributed area
load in this problem. What if we had a concentrated force P (in N) at the mid-point; what
changes then? What if we had a distributed line load p (in N/m)?
Sridhar Krishnaswamy
8-4
Mech_Eng 362 Stress Analysis
Elastic Supports
8.2 ELASTIC FOUNDATIONS:
Consider a long beam that is supported by linear elastic springs of spring constant
K (N/m) at several points separated by a distance 'a' apart. An example of this is a railway
track with the springs being the ties.
a
If the beam deflection is uy (x), then the springs provide a reaction force: Fi = Ku y (x = xi )
at the i'th spring where xi is the location of th i'th spring. If the spring spacing 'a' is small
compared to other relevant length scales, it is simpler to think of the bed of discrete springs
as being made of a continuum of springs called an elastic foundation. The reaction force
from the springs are now distributed as a line load (N/m): q(x) = {K / a}uy (x) ≡ ku y (x)
where k (in N/m2 ) is called the foundation modulus. Elastic foundations actually are quite
common - they can be the ground or floor on which a beam rests that resists by applying a
line load at a point (force/length) that is proportional to the displacement at the point. Given
a set of discrete springs, we can smear them as described above to get an equivalent elastic
foundation. We can also conceptually reverse the process above to go from an elastic
foundation to an equivalent set of discrete springs.
Example 2: Beam Simply-Supported at its Ends and Resting on an Elastic Foundation
L
σo
b
x
h
z
elastic foundation of
modulus k (Nm-2)
y
y
Now consider the beam we saw in example 1, but let us replace the discrete spring at its
midpoint by an elastic foundation. As before, we can use the Rayleigh-Ritz technique with
the same bag of candidate displacements.
Sridhar Krishnaswamy
8-5
Mech_Eng 362 Stress Analysis
Elastic Supports
(i) Bag of Candidate Displacements: Seek a one-parameter sinusoidal bag
πx
uy (x) = a1 sin
0≤x≤L
L
which clearly satisfies the geometric boundary conditions:uy (0) = 0; uy (L) = 0 , and is
smooth enough.
(ii) Calculate the Potential Energy Functional:
In this case, energy can again be stored in two places - the beam and the elastic foundation :
U=U beam + U foundation We already know how to calculate the energy stored in the beam, so let
us concentrate on the foundation. Here is where we should conceptually run the "smearing"
process backwards into a "lumping" process. A continuous foundation of foundation
modulus k (N/m2 ) can be lumped over a length 'dx' into a discrete linear spring of spring
constant K={k.dx} (in N/m). The energy stored in this equivalent discrete spring is:
(1/2) (kdx){uy (x)}2 . Summing over all such equivalent springs that make up the entire
foundation, we have:
L
U foundation =
1
∫ 2 {u (x)} {k.dx }
2
y
x= 0
L
=
∫ 2 {u (x)} .dx
k
2
y
x=0
Evaluating the above (everything else we just borrow from the previous example, because
we have not changed anything else), we get the potential energy functional for the given
structure to be:
1
π 4 EIz 2 2bL
Π = kL +
a −
4L3 1
π
4
o
a1
(iii) Minimizing the potential energy functional, we find:
uy (x) =
4bL2 o
πx
sin
4
π EI z
L
π kL2 +
2
L
Variations: (i) Consider a set of discrete loads Pi (N) acting at the quarter and half points of
the beam; and redo the above example.
(ii) Replace one of the end pins, and use a fixed end instead.
(iii) Try a different - maybe polynomial - bag of displacements.
Sridhar Krishnaswamy
8-6
Mech_Eng 362 Stress Analysis
Bending of Plates
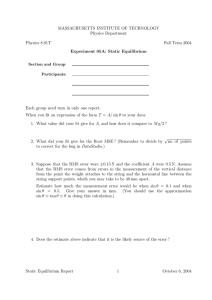
8.3 BENDING OF PLATES:
A plate is a thin structure that is transversely loaded, and is therefore in bending just
like a beam, but now in two-dimensions.
a
h
z
b
x
y
Figure 1
Assumptions:
-We will restrict attention to only rectangular plates of sides 'a' and 'b' that are of constant
thickness 'h' and which are thin (h<<a &b).
- Locate an xyz coordinate system such that the xz-plane coincides with the mid-surface of
the plate.
- Bending of plates deals with the deformation and stresses in the plate caused by
transverse y-directed loads.
As we observed for Bernoulli-Euler beams, we find that the stress and strain states for such
plates are considerably simplified, at least to a fair approximation. In particular, we find
that:
(i) The only important strain components are the in-plane (xz) components:
xx
=
ux
;
x
zz
=
uz
;
z
1 u
u
= x + z ;
2 z
x
xz
(1)
and the other components are negligible. That is:
yy
xy
yz
=
uy
=0
y
(2)
u
1 u
= x + y=0
2 y
x
(3)
u
1 uz
+ y=0
2 y
z
(4)
=
(ii) The stress components
Sridhar Krishnaswamy
yy
;
xy
;
yz
are all negligible.
8-7
Mech_Eng 362 Stress Analysis
Bending of Plates
(iii) The mid-surface of the plate (the y=0 plane) is unstretched and unstressed and is called
the neutral surface of the plate.
These assumptions are obviously just a two-dimensional analog of the Bernoulli-Euler
beam theory assumptions, and as in that theory, you might guess that they are not entirely
consistent. The resulting (Kirchoff) plate bending theory is again only approximately
correct; but it yields pretty decent results for the in-plane components.
As in the Bernoulli-Euler beam theory, we will single out the out-of-plane displacement uy
as our favorite quantity, and call it the plate deflection. We will cast all other quantities in
terms of this plate deflection.
-From (2):
yy
=
uy
=0
y
⇒ u y = uy (x, z)
(5)
-From (3) and (5):
u
u
1 u
u
= x + y = 0 ⇒ x = − y (x, z)
2 y
x
y
x
u
⇒ u x = − y y (x,z) + f1 (x, z)
x
But noting that the neutral surface (y=0) is unstretched, we can set f1 (x,z) = 0, and so
xy
uy
(x, z)
x
-Reasoning exactly as above, but starting with (4) and (5), we find
ux =− y
uz = −y
uy
(x,z)
z
(6)
(7)
Remark: The physical meaning of (5), (6) and (7) taken together is that any y-directed
straight line (vertically through the plate thickness) stays a straight line, suffering a vertical
displacement and a rotation about both x- and z-directions.
We have now cast all the displacements in terms of our favored candidate, the plate
deflection. Computing the strains, using the strain-displacement relations (1), we have:
xx
(6)
2
u
ux }
=
= − y 2y (x, z)
x
x
Sridhar Krishnaswamy
(8)
8-8
Mech_Eng 362 Stress Analysis
zz
xz
Bending of Plates
(7)
2
u
uz }
=
= − y 2 y (x, z)
z
z
(9)
2
uy
1 ux
uz
=
+
(x, z)
= −y
2 z
x
x z
(10)
Next, we can use Hooke's law for an isotropic material and impose our plate assumptions,
to get the reduced stress-strain relations:
xx
zz
1
=
E
1
=
E
xx
≈0
}
−
+
yy
≈0
}
+
zz −
yy
zz
zz
≈ 1 {
E
1
≈ {
E
xx
zz
−
−
zz
xx
}
}
1+
xz
E
Inverting the above to express stresses in terms of strains, and then using (8-10), we find:
xz
xx
zz
xz
=
E
=
1−
E
=
1−
2
2
(
(
xx
zz
+
E
zz ) = −
1−
+
E
xx ) = −
1−
2
uy
E
=−
y
1+
x z
2
2
2uy
y 2 +
x
2
uy
z2
(11)
2uy
y 2 +
z
2
uy
x2
(12)
(13)
Note that the stresses and strains are zero on the mid-plane, as we had demanded.
At this point, we can continue as we did for beams, and consider a small plate element and
derive the differential equations for plate bending, but we will choose another route instead.
Now that we have the stresses and strains, it is a straightforward matter to calculate the
strain-energy stored in plate bending. In particular, the strain-energy density for plate
bending becomes:
1
Uo ,plate = { xx xx + zz zz + 2 xz xz }
2
and using (8-13), the total strain-energy stored in plate bending becomes:
Sridhar Krishnaswamy
8-9
Mech_Eng 362 Stress Analysis
Bending of Plates
Uplate = ∫ Uo dV
V
D 2 u
= ∫ 2y +
2 A x
where D =
Eh3
12(1 −
2
)
2
2u
uy
−
2(1
−
)
2y
z2
x
2
2
uy 2 uy
.dx.dz
−
z2 x z
2
is called the flexural rigidity of a rectangular plate. Note the similarity
(at least for the first term in the integral) between plate and beam bending.
For a rectangular plate all of whose edges are constrained such that they are not allowed to
displace (ie uy =0 on all the edges, say using simple-supports and fixed supports), the
above somewhat messy equation simplifies to:
Uplate
2
D uy
= ∫
+
2 A x2
2
uy
.dx.dz
z2
2
(only for the case: uy =0 on all the edges)
That is, the second term drops out. One can show this using the 2-d counterpart of
integration by parts:
∫∫
A
2
2
u y 2uy
uy u y
uy 3uy
.
.dx.dz = − ∫
.
.dx − ∫∫
.
.dx.dz
x z x z
x z x
x x z2
S
A
2
2
uy u y
uy 2 uy
uy 2uy
= −∫
.
.dx −∫
. 2 .dz + ∫∫ 2 . 2 .dx.dz
x z x
x42z4
z
S1442443 S 14
4
3 A x
= 0 since u =0 on S
= 0 since uy =0 on S
y
where we repeatedly swap an area integral over A to a boundary integral over S.
We can now use energy methods, in particular Rayleigh-Ritz, to solve plate bending
problems.
Sridhar Krishnaswamy
8-10
Mech_Eng 362 Stress Analysis
Bending of Plates
Example 3: Rectangular plate simply-supported on all sides and carrying a distributed
area load p0 N/m2 over its entire surface.
(i) Bag of Displacements: The geometric boundary
a
h conditions are:
uy (x = 0,z) = 0;
z
uy (x = a,z) = 0;
b
x
uy (x,z = 0) = 0;
y
uy (x,z = b) = 0;
and therefore the following one-parameter bag is legal:
πx
πz
uy (x,z) = A1 sin sin
a
b
where A1 is the Rayleigh-Ritz parameter we need to determine.
(ii) Calculate the potential energy functional:
The energy stored is only in the plate, and since all sides of the plate are constrained not to
displace, we can use the simplified formula we developed earlier to get:
Uplate
2
D uy
= ∫
+
2 A x2
b
D
=
2 z=∫0
=
=
D 2
A
2 1
2
uy
.dx.dz
z2
2
2
2
2
πx
πz
A
+
∫x = 0 1 a2 b2 sin a sin b .dx.dz
a
4
1 2 b
1
2 πz
+
sin
.dz
2
2
∫
a
b z= 0
b
a
∫
x=0
sin 2
πx
.dx.dz
a
2
b2 + a2
D 2 2 ab.A12
8 ab
4
The virtual work for this case is:
b
W=
a
∫ ∫ u ( p .dx.dz)
y
o
z =0 x =0
πz
πx
= po A1 ∫ sin .dz ∫ sin .dz
b
z
z=0
x =0
b
a
4poab
A1
π2
The potential energy functional is therefore:
=
2
b 2 + a 2
4p ab
Π=
D 2 2 ab.A12 − o2 A1
8 ab
π
4
(iii) Minimizing the potential energy functional with respect to A1 , we get:
Sridhar Krishnaswamy
8-11
Mech_Eng 362 Stress Analysis
Bending of Plates
16 1 a2b 2
πx
πz
uy (x,z) = 6 2
po .sin .sin
2
π D b + a
a
b
2
Remarks:
(i) Better ("exact") solutions can be obtained by considering:
∞
∞
uy (x,z) = ∑ ∑ sin
n=1 m =1
mπx
nπz
.sin
a
b
(ii) A one-parameter polynomial bag that is suitable for this problem is:
x
x z
z
uy (x,z) = A1 1− 1−
a a b b
(iii) Variations on the above theme:
- what if there is a concentrated force Po (N) at the mid-point?
- or a line load q (N/m) along the center-line parallel to the x-axis?
- or what if there is a linear elastic spring supporting the plate at its mid-point?
Try playing around with such variations to get a better handle on these things.
Sridhar Krishnaswamy
8-12
Mech_Eng 362 Stress Analysis
Buckling of Columns
8.4 BUCKLING OF COLUMNS:
We have thus far looked into equilibrium solutions for various structures. The next
question I want to address is this: are these solutions stable?
First, what do we mean by stability? Consider a rigid ball on a frictionless surface,
where the only significant force is gravitational acting downwards as shown.
4
1
gravity
3
2
At which position do you think is the ball in stable static equilibrium?
- Position 3 is clearly not in static equilibrium; you expect the ball to roll down.
- Position 2 can be in static equilibrium, and I bet you will say that it is stable.
- Position 4 can also be in static equilibrium if you do a balancing act, but is unstable.
- Position 1 is in static equilibrium, and is said to be neutrally stable.
What went into our decisions about the stability of the static equilibrium solutions? If you
think about it a bit, you will find that: to check for stability of an equilibrium state, we
slightly perturb the body about its equilibrium state, and see whether it returns to that state.
Pushing the ball about point 2, we find that it would like to come back to 2 due to the action
of gravity as shown; hence 2 is a stable equilibrium state. At 4, even though we may be
able to balance the ball just so that it is in static equilibrium there, any slight perturbation
will cause the ball to roll downhill away from point 4; hence it is an unstable equilibrium
state. At 1, a slight (as long as it is not too far that it goes down the slope) perturbation will
simply move it to a new equilibrium point; hence 1 is a neutrally stable point.
Now that we understand that investigating the stability of equilibrium states requires
us to (conceptually) slightly perturb the body about the equilibrium state, let us look at a
couple of more interesting examples. Take the case of a rigid uniform bar hinged at one
end; once again, only gravity acting downwards
is important. It is possible, of course, to balance
the rod in either position as shown (the second
one, if you are very skilled). But clearly, only
unstable
stable
gravity
one of these is stable.
Sridhar Krishnaswamy
8-13
Mech_Eng 362 Stress Analysis
Buckling of Columns
Let us now add a linear elastic spring of spring constant K (N/m) to the above uniform
rigid bar of length L, and put it in the following equilibrium state (we will turn gravity off
for simplicity):
P (N)
P (N)
δ
K(N/m)
K(N/m)
perturb to
(grossly exaggerated)
The upright position can be in static equilibrium, with the rod compressing a bit due to the
axially-applied load. To check for stability, perturb the rod about its compressed
equilibrium state, by a small displacement δ at the top as shown. Taking moments about the
pin at the bottom (and recognizing that the perturbation is small), we find:
Moment due to load P that takes the system away from the vertical equilibrium state is Pδ
(acting anticlockwise)
The restoring moment (due to the force from the spring) that wants to take the system back
into its equilibrium position is (k δ)L (acting clockwise) where the moment arm is taken as
L in view of the small perturbations assumed. Therefore:
if Pδ < (k δ)L : bar wants to return to equilibrium state;
if Pδ > (k δ)L : spring cannot restore the equilibrium state;
if Pδ = (k δ)L : system can stay in perturbed state.
Therefore: Pcr = kL is the load which demarcates the case of stable equilibrium and unstable
equilibrium - i.e, the system (given rod and spring) is stable for all loads P<Pcr ; and is not
stable for higher loads.
We can imagine that this issue of stability of equilibrium states might arise for deformable
structures as well, and indeed it does. We will see only one case in this course: that of a
deformable rod under an axially compressive load - also known as a column.
Sridhar Krishnaswamy
8-14
Mech_Eng 362 Stress Analysis
Buckling of Columns
FORCE-BALANCE APPROACH TO BUCKLING OF COLUMNS:
Consider a straight cylindrical column whose ends are pinned, and which carries a
compressive axial load of P (N) as shown.
P
P
The static equilibrium solution to this
problem is well know to you.
y
y
Solution: Column stays straight, but
compresses such that:
x
x
stress σxx = - P/A
L
uy (x)
strain εxx = -P/AE
where A is the cross-sectional area, and E
is the Young's modulus of the material of
the rod.
Now, is this static equilibrium state stable? To check this, we need to perturb the rod about
its straight compressed state. That is, let us conceptually slightly perturb the rod laterally by
an amount uy (x) which can be arbitrary except that it must satisfy the end conditions that
uy (0)=0; and uy (L)=0 (because of the pins). Let us see if the deformed state (shown dotted
in the skeletal figure above) is a possible equilibrium state: if it is, then you must see that
the straight compressed position is not a stable equilibrium state if you have been following
what we have been saying so far. Note that the deformed state is just a beam, and so we
can use the Bernoulli-Euler machinery to see if it is possible to obtain a perturbed state.
The axial load 'P' produces a moment -P.u y (x) at any cross-section a distance 'x' from the
top pin. In addition, if there are any reaction forces produced by the
P
FR
pin at the top, this contributes a moment FR .x at any cross-section.
y
So, the net cross-sectional moment is:
M(x) = -P.u y (x)+ F R .x. (We might also have a reaction moment MR
uy
M(x)
x
if the top had been a fixed end rather than a hinge).
Using this in the Bernoulli-Euler beam equation, we find:
d 2uy
EIz 2 = M(x) = −P.uy + FR.x
(*)
dx
where Iz is the cross-sectional moment of inertia. It is convenient to get rid of the unknown
reaction force (and reaction moment if we had any) by taking two derivatives of (*) with
respect to 'x'. Then:
d 4uy
d 2u y
EIz 4 + P. 2 = 0 .
dx
dx
Sridhar Krishnaswamy
(**)
8-15
Mech_Eng 362 Stress Analysis
Buckling of Columns
This is the governing differential equation for column buckling, and in fact is valid for a
uniform column with any end condition (hinges or clamps). If we find a non-zero solution
to (**), then the perturbed state is possible, and so the column is not stable in its vertical
compressed state. The general solution to (**) is:
uy (x) = c1 sin .x + c2 cos .x + c3 x + c4
where
2
= P EIz .
Case 1: Rod pinned at both ends.
Here we require that:
displacements at the pins be zero: uy (0) = 0; uy (L) = 0;
and moment at the pins be zero: uy'' (0) = 0; uy'' (L) = 0;
where a double-primes indicate twice-differentiation with respect to 'x'.
Thus:
uy (0) = 0 ⇒ c2 + c4 = 0
uy (L) = 0 ⇒ c1 sin .L + c2 cos .L + c3 L + c4 = 0
uy'' (0) = 0 ⇒−c 2
2
uy'' (L) = 0 ⇒ −c1
2
=0
sin .L − c2
2
cos .L = 0
which can be written in matrix form as:
0
sin .L
0
− 2 sin .L
1
0 1 c1
cos .L
L 1 c2 00
− 2
0 0 c3 = 0
− 2 cos .L 0 0 c4 0
One obvious solution is that all the c's are zero, which means that uy (x) = 0, and so the
perturbed state is not possible; which means that the compressed vertical state is a stable
equilibrium. However, non-zero solutions are possible if the determinant of the coefficient
matrix above were to vanish: ie., sin .L = 0. This can happen if: .L = nπ n = 1,2,3...
That is, at certain discrete levels of the compressive load 'P' (note that
2
= P EIz ), it is
possible for a perturbed state to be obtained, which means that the column is not stable in
its vertical position at these loads:
Pn,cr
π 2EI z
=n
L2
2
n = 1,2,3...
and the corresponding perturbed state that is possible is: uy (x) = c1 sin
nπx
L
The lowest of these loads is when n=1:
Sridhar Krishnaswamy
8-16
Mech_Eng 362 Stress Analysis
Buckling of Columns
π2 EIz
L2
which is called the Euler buckling load of a column that is pinned at both ends. When the
compressive load happens to be the Euler buckling load, the column can buckle into a
sinusoidal shape (of amplitude c1 that cannot be determined by our simple theory).
PEuler =
Remarks:
(i) In the design of structures that have compressive axial loads (for instance trusses), it is
important that not only do we take care that all components are strong enough to sustain the
expected stresses, it is also essential that we ensure that buckling of any element does not
occur.
(ii) Note that a slender column (one whose length L is large compared to its cross-sectional
dimensions represented by Iz) buckles more readily than a fat one. Actually, a nondimensional measure of this slenderness is: S = L2 A /Iz where A is the cross-sectional area.
(iii) Show that if the rod were in tension, the vertical stretched equilibrium state is stable.
(All you need to show is that the governing differential equation for column buckling (**)
with 'P' replaced by '-P' has no non-zero solution.)
Case 2: A pinned-clamped column
Next, let us consider a column that is fixed at one end and is
clamped at the other. Here, the displacements at both ends are zero;
the moment at the pin is zero, and the slope at the fixed end is zero.
P
uy (0) = 0 ⇒ c2 + c4 = 0
y
uy (L) = 0 ⇒ c1 sin .L + c2 cos .L + c3 L + c4 = 0
u (0) = 0 ⇒−c 2
''
y
2
=0
x
L
uy' (L) = 0 ⇒ c1 cos .L − c2 sin .L + c3 = 0
The only non-trivial solution is if:
0
sin .L
0
cos .L
1
0
cos .L
L
− 2
0
− sin .L 1
1
1
0 =0
0
which yields: .L = tan .L . The smallest root when this occurs is .L = 4.493. Thus, the
critical buckling load for a pinned-clamped column is: Pcr = 20.16
EI Z
. Note that this is
L2
higher than for a pinned-pinned column.
Sridhar Krishnaswamy
8-17
Mech_Eng 362 Stress Analysis
Buckling of Columns
Remarks: Even though our analysis indicates that these columns are unstable (can buckle)
only at discrete critical loads, in reality any slight imperfections in the columns will cause
the columns to undergo rather large lateral deflections as we approach the critical loads. It is
thus wise to design compressive structures with a decent factor of safety to avoid buckling.
RAYLEIGH-RITZ APPROACH TO BUCKLING OF COLUMNS:
For columns that are not uniform, we can use the Rayleigh-Ritz technique to compute the
buckling loads. The only thing here that maybe somewhat not readily apparent to you is the
calculation of the virtual work term.
P
P
We need to calculate the distance 'e'
y
e
moved by the applied load (in the
duy
de=ds-dx
direction of the load) when we
laterally perturb the rod by uy (x).
x
dx
L
ds
This is shown greatly exaggerated
in the figures. Noting that the
neutral axis of the beam is
unstretched (bear in mind that we
are now talking about this from the compressed equilibrium state), we find that any
elemental length ds of the beam deforms as shown, and so
de = ds − dx = ( dx) + ( duy ) − dx . Integrating over the entire beam:
2
2
L− e
e=
∫ ds − dx
x= 0
du 2 1 / 2
y
≈ ∫ 1 −
−1dx
dx
x =0
L
1 L du y
dx
2 ∫0 dx
2
≈
where the last approximation is assuming small deformations. The virtual work is therefore
P.e, and we can evaluate the potential energy functional.
Example: A free-fixed column, of uniform flexural rigidity EIz and length L.
Sridhar Krishnaswamy
8-18
Mech_Eng 362 Stress Analysis
Buckling of Columns
(i) Bag of displacements:
x
uy (x) = a1
L
is smooth and satisfies the gbc's that displacement and slope be
zero at the fixed end (x=0).
(ii) Calculate the potential energy functional:
P
2
L
x
2
EI d 2u
P L duy
Π = ∫ z 2y dx − ∫
dx
2
dx
2
dx
0
0
L
y
2a12 EIz P
−
L L2
3
(iii) Minimize the potential energy functional with respect to a1 :
either a1=0 (trivial solution which means that buckled state not possible)
3EI
or Pcr = 2 z which is the critical buckling load.
L
Remarks:
EI
(i) The exact solution using the force-balance approach is: Pcr,exact = 2.4674 2z
L
=
2
3
EI
x
x
(ii) Using a better two parameter bag: uy (x) = a1 + a2 yields Pcr = 2.49 2z
L
L
L
which is better.
(iii) Unfortunately, approximate RR solutions for the buckling loads always over-predict,
and this is not good because it is not conservative! So when, using RR for buckling loads
in any real design situation, give yourself plenty of safety factor; or else carry a large
liability insurance!
Sridhar Krishnaswamy
8-19