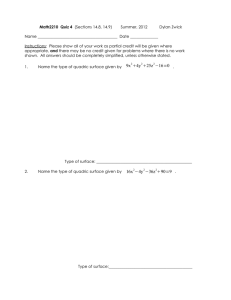
2020/11/9 Cylindrical coordinates Dynamics Home Reference Applications Cylindrical coordinates #rvy Warning! The cylindrical coordinate system extends polar coordinates into 3D by using the standard vertical coordinate z. This gives coordinates (r, θ, z) consisting of: coordinate r θ z name radius azimuth height range 0 ≤ r < ∞ −π < θ ≤ π −∞ < z < ∞ We normally write r ⃗ for the position vector of a point, but if we are using cylindrical coordinates r, θ, z then this is dangerous. This is because r might mean the magnitude of r ⃗ or the radial coordinate, which are different. To avoid this confusion we use ρ ⃗ for the position vector and r for the radial coordinate. definition distance from the z-axis angle from the x-axis in the x–y plane vertical height The diagram below shows the cylindrical coordinates of a point P . By changing the display options, we can see that the basis vectors are tangent to the corresponding coordinate lines. Changing θ moves P ^θ , and similarly for the other coordinates. along the θ coordinate line in the direction e reset Show: labels B coordinates basis vectors Coordinate lines: r , , , θ #rvy‑ir B z , Radius: r = 4 Azimuth: θ = 45° Elevation: z = 4 Cylindrical coordinates are defined with respect to a set of Cartesian coordinates, and can be converted to and from these coordinates using the atan2 function as follows. Conversion between cylindrical and Cartesian coordinates #rvy‑ec 2 2 x = r cos θ r = √x y = r sin θ θ = atan2(y, x) z = z z = z + y atan2(y,x) = arctan(y/x) Derivation #rvy‑ec‑d + The basis vectors are tangent to the coordinate lines and form a right-handed orthonormal basis ^ ^r , e ^θ , e ^z that depends on the current position P ⃗ as follows. We can write either e ^z or k e for the vertical basis vector. Cylindrical basis vectors #rvy‑eb e ^r = cos θ ^ ı + sin θ ^ ȷ e ^θ = − sin θ ^ ı + cos θ ^ ȷ ^ e ^z = k ı = cos θ e ^r − sin θ e ^θ ^ dynref.engr.illinois.edu/rvy.html 1/2 2020/11/9 Cylindrical coordinates r θ ^ ȷ = sin θ e ^r + cos θ e ^θ ^ ^z k = e Derivation #rvy‑eb‑d + If the cylindrical coordinates change with time then this causes the cylindrical basis vectors to rotate with the following angular velocity. Angular velocity of the cylindrical basis #rvy‑ew ˙ ^ ω⃗ = θ e z Derivation #rvy‑ew‑d + The rotation of the basis vectors caused by changing coordinates gives the time derivatives below. Time derivatives of cylindrical basis vectors #rvy‑et ˙ ˙ e ^r = θ e ^θ ˙ ˙ e ^θ = − θ e ^r ˙ e ^z = 0 Derivation #rvy‑et‑d A point P at a time-varying position (r, θ, z) has position vector ρ ⃗, velocity v⃗ ˙ = ρ⃗ , and acceleration a⃗ + ¨ = ρ⃗ given by the following expressions in cylindrical components. Position, velocity, and acceleration in cylindrical components #rvy‑ep ρ⃗ = r e ^r + z e ^z ˙ v⃗ = ṙ e ^r + r θ e ^θ + ż e ^z 2 ˙ ¨ ˙ ^ ^r + (rθ ^z a⃗ = (r̈ − rθ ) e + 2ṙ θ ) e θ + z̈ e Derivation #rvy‑ep‑d + Copyright (C) 2012-2015 Matthew West dynref.engr.illinois.edu/rvy.html 2/2