Temperature Alarm & LVDT Displacement Measurement System Design
advertisement

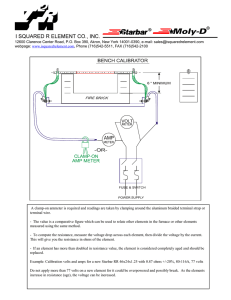
YANBU INDUSTRIAL COLLEGE DEPARTMENT OF ELCTRICAL AND ELECTRONICS ENGINEERING TECHNOLOGY SEMESTER -2, 2019-20 (1441H) As a team analyze and answer the following 1) As part of an alarm system for overheating of liquid in container, a measurement system is required which will set off an alarm when the temperature rises above 40° 𝐶. The liquid is normally at 30° 𝐶. The output from the measurement system be a 1V. as an engineer suggest a possible measurement system. We first use an NTC thermistor sensor whose resistance temperature graph is shown below: We see that at 30 degree C, its resistance is 8260 ohms and at 40 degree C, the resistance is 5740 ohms. Thus, if we plan to use this in a Wheatstone bridge, the nominal resistance to be used for the other resistors are 8260ohms. We connect the thermistor in a Wheatstone bridge as follows: YANBU INDUSTRIAL COLLEGE DEPARTMENT OF ELCTRICAL AND ELECTRONICS ENGINEERING TECHNOLOGY SEMESTER -2, 2019-20 (1441H) While temperature is 30 C we want the bridge to be balanced. To balance the bridge Vc must Equal Vd so we have to do some calculations 𝑅2 To determine VC, we use this equation 𝑣𝐶 = 𝑅 1 +𝑅2 × 𝑣𝑠 8260 While R1=R2=8260 ohms and Vs = 5v thus 𝑣𝐶 = 8260+8260 × 5 = 2.5𝑣 To determine VD, we use this equation 𝑣𝑑 = 𝑅 𝑅4 3 +𝑅4 × 𝑣𝑠 8260 While R4=R3=8260 ohms and Vs = 5v thus 𝑣𝑑 = 8260+8260 × 5 = 2.5𝑣 𝑉𝑜𝑢𝑡 = 𝑉𝑐 − 𝑉𝑑 = 2.5 − 2.5 = 0𝑣 When temperature rises to 40 C, we want the bridge to transduce the change in resistance into voltage. To determine the output of the bridge when temperature is equal to 40 C. We know when the temperature of NTC is 40 C the resistance is equal to 5740 ohms. so, we can calculate the following: 𝑣𝐶 = 𝑅 𝑅2 1 +𝑅2 𝑣𝐶 = × 𝑣𝑠 and 𝑣𝑑 = 𝑅 𝑅4 3 +𝑅4 × 𝑣𝑠 𝑅2 × 𝑣𝑠 𝑅1 + 𝑅2 8260 = 8260+8260 × 5𝑣 = 2.5𝑣 (𝑎𝑙𝑤𝑎𝑦𝑠 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡) 𝑅4 𝑣𝑑 = 𝑅 + 𝑅 × 𝑣𝑠 3 4 = 5740 × 5𝑣 = 2.05 (𝑣𝑎𝑟𝑖𝑒𝑠 𝑤𝑖𝑡ℎ 𝑡𝑒𝑚𝑝𝑒𝑟𝑎𝑡𝑢𝑟𝑒 𝑜𝑓 𝑁𝑇𝐶) 8260 + 5740 Thus, when temperature is 40 C the output voltage can be determined as follows: 𝑉𝑜𝑢𝑡 = 𝑉𝑐 − 𝑉𝑑 = 2.5 − 2.05 = 0.45𝑣 But in this system the output must be equal to 1v we can use an instrumentational amplifier to amplify 0.45v to a 1v signal at output. YANBU INDUSTRIAL COLLEGE DEPARTMENT OF ELCTRICAL AND ELECTRONICS ENGINEERING TECHNOLOGY SEMESTER -2, 2019-20 (1441H) In instrumentational amplifier the gain formula can be found as: 𝐴𝑣 = 𝑣 𝑣𝑜 2 −𝑣1 Since we want Vo to be 1v we can determine what value of gain is required while V2 = Vc, V1= VD. So, 𝐴𝑣 = 𝑣 𝑣𝑜 2 −𝑣1 = 1𝑣 𝑉𝑐−𝑉𝑑 1𝑣 1 = 2.5𝑣−2.05𝑣 = 0.45𝑣 = 2.2 so we can understand that to get output of 1v we have to design an instrumentational amplifier with 2.2 gain. With following equation, we can design the amplifier to amplify 0.45v input to 1v Signal. Vo 2𝑅1 𝑅3 𝐴𝑣 = (1 + ( )) × ( ) 𝑅𝑦 𝑅2 Put R3=R2=1k, R1=750 ohms then solve for Rg. 2(750) 1𝑘 2.2 = (1 + ( )) × ( ) 𝑅𝑔 1𝑘 𝑅𝑔 = 1250 = 1.250𝑘 𝑜ℎ𝑚𝑠 We get a gain of 2.2, and the output = 1V, when the temperature rises to 40-degree C. YANBU INDUSTRIAL COLLEGE DEPARTMENT OF ELCTRICAL AND ELECTRONICS ENGINEERING TECHNOLOGY SEMESTER -2, 2019-20 (1441H) 2) With drawing, write about variable differential transformer transducer, and how it can be used in displacement measurement using two differential transformers in a closed loop servo system provide your answer with a diagram. LVDT-Linear variable differential transformer ➢ Used to measure Linear motion and Displacement. ➢ Primary transducer of Displacement measurement. ➢ Secondary transducer for force weight pressure. When there is no movement 𝐸𝑆1 = 𝐸𝑆2 𝐸0 = 𝐸𝑆1 − 𝐸𝑆2 = 0 When the core moves Right to left Left to Right 𝐸𝑆1 > 𝐸𝑆2 𝐸𝑆1 < 𝐸𝑆2 𝐸𝑆 = +𝑉𝑒 𝐸𝑆 = −𝑉𝑒 The secondary transducer is connected in different mod 180𝑜 phase operation 𝐸 −𝐸 𝐷𝑖𝑠𝑝𝑙𝑎𝑠𝑒𝑚𝑒𝑛𝑡 = 𝐸𝑆2 +𝐸𝑆2 𝑆1 ➢ ➢ ➢ ➢ O/P Tells about the Displacement i.e. Right to Left / Left to Right. o/p of LVDT is Linear free from friction lessees low power consumption. Sensitivity of LVDT is due to exeat cancellation of secondary voltage 𝑆2 YANBU INDUSTRIAL COLLEGE DEPARTMENT OF ELCTRICAL AND ELECTRONICS ENGINEERING TECHNOLOGY SEMESTER -2, 2019-20 (1441H) A Servomotor is a rotary actuator or linear actuator that allows for precise control of angular or linear position, velocity and acceleration. The term servomotor is suitable for use in a closedloop control system. A Servomotor is a closed-loop servomechanism that uses position feedback to control. The input to its control is an analog signal or digital signal representing the position commanded for the output shaft. The motor is paired with some type of encoder to provide position and speed feedback. The device is controlled by a feedback signal generated by comparing output signal and reference input signal. Servo motor can be rotated from 0 to 180 degree, but it can go up to 210 degree, depending on the manufacturing. The LVDT is used to monitor the position of the moving bolster. It consists of three solenoid coils which are faced opposite to each other. The core is placed between the coils. The movement of the core which causes induced voltage to change. The change in voltage will cause the changes in movement of bolster. It can operate up to high temperature of 12000 F. The operating voltage for the LVDT is 24 V DC. It is mainly used in the servo motor for the position feedback control. We use BALLUFF LVDT for this operation. It can withstand up to 850F.The over voltage protection is possible and also it will record the default reading when it is turned off suddenly. The LVDT is connected with help of the 8-pin female connector. Figure 4 Architecture of the system Figure 5 Construction of LVDT