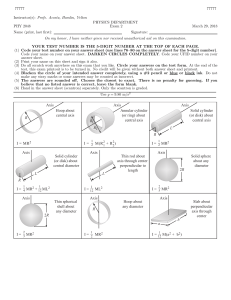
77777 77777 Instructor(s): Profs. Acosta, Hamlin, Yelton PHYSICS DEPARTMENT Exam 2 PHY 2048 Name (print, last first): March 29, 2018 Signature: On my honor, I have neither given nor received unauthorized aid on this examination. YOUR TEST NUMBER IS THE 5-DIGIT NUMBER AT THE TOP OF EACH PAGE. (1) Code your test number on your answer sheet (use lines 76–80 on the answer sheet for the 5-digit number). Code your name on your answer sheet. DARKEN CIRCLES COMPLETELY. Code your UFID number on your answer sheet. (2) Print your name on this sheet and sign it also. (3) Do all scratch work anywhere on this exam that you like. Circle your answers on the test form. At the end of the test, this exam printout is to be turned in. No credit will be given without both answer sheet and printout. (4) Blacken the circle of your intended answer completely, using a #2 pencil or blue or black ink. Do not make any stray marks or some answers may be counted as incorrect. (5) The answers are rounded off. Choose the closest to exact. There is no penalty for guessing. If you believe that no listed answer is correct, leave the form blank. (6) Hand in the answer sheet (scantron) separately. Only the scantron is graded. Use g = 9.80 m/s2 Axis R Axis Axis Annular cylinder (or ring) about central axis Hoop about central axis R1 Solid cylinder (or disk) about central axis R2 L R 1 1 I = 2 M(R 12 + R 22 ) I = MR 2 Axis Solid cylinder (or disk) about central diameter Axis L L I = 2 MR2 Thin rod about axis through center perpendicular to length Axis Solid sphere about any diameter 2R R 1 1 Axis 2 1 I = 4 MR2 + 12 ML2 I = 12 ML2 Thin spherical shell about any diameter Axis R I = 5 MR2 Hoop about any diameter Axis Slab about perpendicular axis through center 2R b a 2 I = 3 MR2 1 I = 2 MR2 1 I = 12 M(a2 + b2) 77777 77777 PHY2048 Exam 1 Formula Sheet Vectors q Magnitudes: |~a| = a2x + a2y + a2z ~a = ax î + ay ĵ + az k̂ ~b = bx î + by ĵ + bz k̂ Scalar Product: ~a · ~b = ax bx + ay by + az bz |~b| = q b2x + b2y + b2z Magnitude: ~a · ~b = |~a||~b| cos θ (θ = angle between ~a and ~b) Vector Product: ~a × ~b = (ay bz − az by )î + (az bx − ax bz )ĵ + (ax by − ay bx )k̂ Magnitude: |~a × ~b| = |~a||~b| sin θ (θ = angle between ~a and ~b) Motion Displacement: ∆~r = ~r(t2 ) − ~r(t1 ) Average Velocity: ~vave = ∆~r ~r(t2 ) − ~r(t1 ) = ∆t t2 − t1 Instantaneous Velocity: ~v = Average Speed: save = (total distance)/∆t d~r(t) dt Average Acceleration: ~aave = Relative Velocity: ~vAC = ~vAB + ~vBC ∆~v ~v (t2 ) − ~v (t1 ) = ∆t t2 − t1 Instantaneous Acceleration: ~a = d~v d2~r = 2 dt dt Equations of Motion for Constant Acceleration ~v = ~v0 + ~at ~r − ~r0 = ~v0 t + 12 ~at2 2 vx2 = vx0 + 2ax (x − x0 ) (in each of 3 dim) Newton’s Laws F~net = 0 ⇔ ~v is a constant (Newton’s First Law) F~net = m~a (Newton’s Second Law) “Action = Reaction” (Newton’s Third Law) Force due to Gravity Weight (near the surface of the Earth) = mg ( use g=9.8 m/s2 ) Magnitude of the Frictional Force Static: fs ≤ µs FN Kinetic: fk = µk FN Uniform Circular Motion (Radius R, Tangential Speed v = Rω, Angular Velocity ω) Centripetal Acceleration: a = v2 = Rω 2 R Period: T = 2πR 2π = v ω Projectile Motion Range: R = v02 sin(2θ0 ) g If: ax2 + bx + c = 0 Quadratic Formula √ −b ± b2 − 4ac Then: x = 2a Work (W ), Mechanical Energy (E, Kinetic Energy (K)), Potential Energy (U ) Z ~r2 F~ · d~r When force is constant W = F~ · d~ Kinetic Energy: K = 21 mv 2 Work: W = ~ r1 Power: P = dW dt = F~ · ~v Work-Energy Theorem: Kf = Ki + W 77777 77777 PHY2048 Exam 2 Formula Sheet • Potential Energy: ∆U = −W = − R ~r2 ~ r1 Gravitational (y=up): Fy = −mg F~ · d~r Fx = − dU dx U (y) = mgy Hooke’s Law: Fx = −kx Elastic Potential energy (x from spring equilibrium): U (x) = 1 2 kx 2 • Mechanical Energy: Emec = K + U Emec = constant for an isolated system with conservative forces • Work-Energy: W (external) = ∆K + ∆U + ∆E(thermal) 1 Mtot • Center of Mass: ~rcom = PN i=1 d~ p dt If F~ = d~ p dt Mtot = PN i=1 Impulse: J~ = ∆~ p= • Linear Momentum: p~ = m~v F~ = mi~ri R tf ti mi F~ (t)dt = F~av ∆t = 0 then ~ p = constant and p~f = p~i PN P~tot = Mtot ~vcom = i=1 p~i ~tot dP dt F~net = = Mtot ~acom • Elastic Collisions of Two Bodies, 1D v1f = m1 −m2 m1 +m2 v1i + 2m2 m1 +m2 v2i v2f = • Rockets: Thrust = M a = vrel dM dt 2m1 m1 +m2 v1i + m2 −m1 m1 +m2 v2i Mi ∆v = vrel ln( M ) f • Rotational Variables angular position: θ(t) angular velocity: ω(t) = angular acceleration: α(t) = dω(t) dt = dθ(t) dt d2 θ(t) dt2 • For constant angular acceleration α: ω = ω0 + αt ω 2 = ω02 + 2α(θ − θ0 ) 1 θ = θ0 + ω0 t + αt2 2 1 θ = θ0 + (ω + ω0 )t 2 • Angular to linear relationships for circular motion arc length: s = rθ velocity: v = rω tangential acceleration: aT = rα • Rotational Inertia: I = PN i=1 centripetal acceleration: ac = rω 2 mi ri2 (discrete) R I = r2 dm (continuous) Parallel Axis: I = Icom + Mtot d2 (d is displacement from c.o.m.) 77777 77777 PHY2048 Exam 2 Formula Sheet • Rotational, Rolling Kinetic Energy: Krot = Rolling without slipping: xcom = Rθ Rolling down a ramp: acom = • Torque: ~τ = ~r × F~ 1 2 Iω 2 vcom = Rω 2 Kroll = 12 M vcom + 21 Icom ω 2 acom = Rα gsinθ I 1 + mR 2 (where k̂ = î × ĵ gives directions for cross product) τ = rF sin (angle between ~r and F~ ) = rF⊥ ~ = ~r × p~ • Angular Momentum: L ~τ = ~ dL dt L = rp sin (angle between ~r and ~ p) = rp⊥ If ~τnet = ~ dL dt ~ = constant and L ~f = L ~i = 0 then L • Work done by a constant torque: W = τ ∆θ = ∆Krot = 1 2 1 2 Iω − Iω 2 2 2 1 • Power done by a constant torque: P = τ ω • For torque acting on a body with rotational inertia I: ~τ = I~ α • Stress and Strain (Y = Young’s modulus, B = bulk modulus) Linear: F A =Y Volume: P = ∆L L F A = −B ∆V V