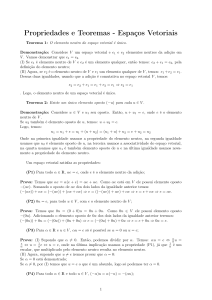
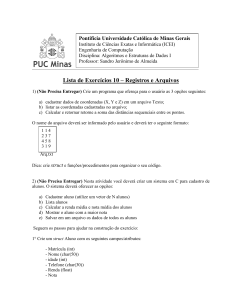
ENE - UnB – Notas de Aula da disciplina Eletromagnetismo 1 Professor: Achiles Fontana da Mota Aula 1 – Revisão de Álgebra Vetorial Tópicos da aula: definição de ponto e vetor; operações de soma e subtração com vetores; produto escalar e vetorial; definição de função escalar e função vetorial; operações diferenciais de primeira e segunda ordem com funções vetoriais (gradiente, divergente, rotacional e laplaciano). 1. Ponto, vetor e versor No plano cartesiano, um ponto determina uma posição infinitesimal no espaço. Em coordenadas cartesianas (x,y,z), a localização do ponto é definido por sua distância em relação aos eixos x, y e z. Por exemplo, o ponto A pode ser representado por sua distância (xA; yA; zA) em relação aos eixos (x;y;z), conforme apresentado na Fig. 1 (a). A localização de um ponto também pode ser representada por um segmento de reta com início na origem do sistema cartesiano e fim no ponto. Este segmento de reta, que possui amplitude direção e sentido definido pelo segmento de reta mencionado é denominado vetor (a notação é uma seta acima da variável). O mesmo ponto A (xA; yA; zA) pode ser representado pelo vetor ⃗⃗⃗ 𝑟𝐴 . Antes de definirmos o vetor ⃗⃗⃗ 𝑟𝐴 , precisamos definir o espaço cartesiano a partir da notação vetorial. É de conhecimento, que o sistema cartesiano pode ser descrito por sua base 𝑥̂, 𝑦̂, 𝑧̂ , onde 𝑥̂, 𝑦̂, 𝑧̂ são vetores de módulo unitário (denominados versores) com direção e sentido dados pelos eixos cartesianos x, y e z, respectivamente, conforme apresentado na Fig. 1 (b). Neste contexto, o ⃗⃗⃗ 𝑟𝐴 pode ser definido como: 𝑟𝐴 = 𝑥𝐴 𝑥̂ + 𝑦𝐴 𝑦̂ + 𝑧𝐴𝑧̂ . ⃗⃗⃗ (1) O módulo de um vetor (notação ||), é simplesmente seu tamanho, ou seja, ele define a distância entre o ponto e a origem do sistema de coordenadas. Em coordenadas cartesianas, o módulo do vetor ⃗⃗⃗ 𝑟𝐴 pode ser obtido facilmente por relações geométricas (Pitágoras, vide Fig. 1 (b)), e é dado por, |⃗⃗⃗ 𝑟𝐴 | = √𝑥𝐴2 + 𝑦𝐴2 + 𝑧𝐴2 . (2) Para todo vetor, também podemos definir seu versor (a notação é um chapéu acima da variável), ou seja, um vetor de módulo unitário que indica somente a direção e sentido do vetor. Para se obter o versor (𝑟̂𝐴 ) de um vetor (𝑟⃗⃗⃗𝐴 ), basta dividi-lo pelo seu módulo |𝑟⃗⃗⃗𝐴 |, ou, Figura 1 – Definição de ponto (a) e vetor (b). ⃗⃗⃗⃗⃗ 𝑟 𝑟̂𝐴 = |𝑟⃗⃗⃗⃗⃗𝐴| = 𝐴 𝑥𝐴 𝑥̂+𝑦𝐴 𝑦̂+𝑧𝐴 𝑧̂ 2 +𝑦 2 +𝑧 2 √𝑥𝐴 𝐴 𝐴 . (3) Na disciplina de eletromagnetismo é de extrema importância saber escrever o vetor através de seu módulo e direção, ou seja, ⃗⃗⃗ 𝑟𝐴 = |𝑟⃗⃗⃗𝐴 |𝑟̂𝐴 , pois esta notação irá facilitar a resolução de vários problemas que serão propostos. Além disso, destaco também a importância da notação que eu irei adotar. Sempre que se tratar de um vetor relacionado a um ponto específico do espaço (ex. ponto B), será utilizado a notação em que todas as componentes do vetor serão definidas com o subscrito B (ex: ⃗⃗⃗ 𝑟𝐵 , 𝑥𝐵 , 𝑦𝐵 , 𝑧𝐵 …). Caso estejamos falando de um ponto genérico no espaço (como em funções vetoriais), não será adotado nenhum subscrito a variável (ex: 𝑟, 𝑥, 𝑦, 𝑧 …). 2. Soma e subtração de vetores Antes de falar sobre soma e subtração, vamos definir o negativo de um vetor. O negativo de um vetor nada mais é que um vetor de mesmo módulo e direção, porém com sentido oposto, conforme apresentado na Fig. 2 (a). Matematicamente, inverte-se o sentido de um vetor sem alterar seu módulo e direção adicionando o sinal de menos a todas as coordenadas do vetor, por exemplo, o vetor negativo de ⃗⃗⃗ 𝑟𝐴 é dado por −𝑟⃗⃗⃗𝐴 = −𝑥𝐴 𝑥̂−𝑦𝐴 𝑦̂ − 𝑧𝐴 𝑧̂ . (4) A resultante da soma de vetores (𝑟⃗⃗⃗𝐴 + ⃗⃗⃗ 𝑟𝐵 ) gera um vetor que liga a origem do sistema a um ponto C no espaço, tal que ⃗⃗⃗ 𝑟𝐶 = ⃗⃗⃗ 𝑟𝐴 + ⃗⃗⃗ 𝑟𝐵 , conforme mostrado na Fig. 2 (b). Geometricamente, esse ponto pode ser obtido deslocando a origem de ⃗⃗⃗ 𝑟𝐵 para o ponto A, e o fim deste vetor representa o ponto C (vide Fig. 2 (b)). Como a ordem dos fatores não altera a soma, o ponto C pode ser obtido deslocando ⃗⃗⃗ 𝑟𝐴 para o ponto B. Matematicamente, 𝑟𝐶 = ⃗⃗⃗ ⃗⃗⃗ 𝑟𝐴 + ⃗⃗⃗ 𝑟𝐵 = (𝑥𝐴 + 𝑥𝐵 )𝑥̂ + (𝑦𝐴 + 𝑦𝐵 )𝑦̂ + (𝑧𝐴 + 𝑧𝐵 )𝑧̂ . (5) A subtração de vetores ( ⃗⃗⃗ 𝑟𝐴 − ⃗⃗⃗ 𝑟𝐵 ) nada mais é que a soma do vetor de um vetor (𝑟⃗⃗⃗𝐴 ) com o negativo do outro vetor (−𝑟⃗⃗⃗𝐵 ). Geometricamente, a soma com o negativo resulta em um vetor com origem no ponto B e fim no ponto A, conforme apresentado na Fig. 2 (c). Do ponto de vista dessa disciplina, essa é a operação linear mais importante de vetores, pois será de extrema importância para o cálculo de campos elétricos e magnéticos. Na definição desse curso, o vetor que liga o ponto B com o ponto A será definido como ⃗⃗⃗⃗⃗⃗ 𝑟𝐵𝐴 , e matematicamente ele pode ser obtido pela expressão 3. Multiplicação de vetores Existem dois operações para se multiplicar vetores, a primeira é conhecida como produto escalar e a segunda como produto vetorial. Intuitivamente pelo nome, o resultado destas operações são variáveis escalares para produtos escalares e vetoriais para produtos vetoriais. - (a) - Inverso (b) - Soma (c) - Subtração Figura 2 – Definição do negativo (a), soma (b) e subtração (c) de vetores. Produto Escalar A notação do produto escalar entre vetores é o ∙. Suponha 2 vetores ⃗⃗⃗ 𝑟𝐴 e ⃗⃗⃗ 𝑟𝐵 com um ângulo θ entre eles, o produto escalar entre eles é definido como por 𝑟𝐴 ∙ ⃗⃗⃗ ⃗⃗⃗ 𝑟𝐵 = |⃗⃗⃗ 𝑟𝐴 ||⃗⃗⃗ 𝑟𝐵 |cos𝜃. (6) Conforme pode ser visto, caso o ângulo entre os vetores seja de 90º, o produto escalar entre eles é zero, porém se eles estiverem com mesma direção e sentido, o produto escalar é simplesmente o produto do módulo dos vetores. Logo, o produto escalar nos da informação sobre o quão alinhado estão os vetores. Utilizando esta lógica, podemos definir o produto entre os versores de x, y e z como: 𝑥̂ ∙ 𝑥̂ = 1 𝑥̂ ∙ 𝑦̂ = 0 𝑥̂ ∙ 𝑧̂ = 1 𝑦̂ ∙ 𝑥̂ = 0 𝑦̂ ∙ 𝑦̂ = 1 𝑦̂ ∙ 𝑧̂ = 0 𝑧̂ ∙ 𝑥̂ = 0 𝑧̂ ∙ 𝑦̂ = 0 𝑧̂ ∙ 𝑧̂ = 1 Sabendo das propriedades da tabela acima, o produto escalar também pode ser obtido utilizando a propriedade distributiva de multiplicação, ou seja, 𝑟𝐴 ∙ ⃗⃗⃗ ⃗⃗⃗ 𝑟𝐵 = (𝑥𝐴 𝑥̂ + 𝑦𝐴 𝑦̂ + 𝑧𝐴 𝑧̂ ) ∙ (𝑥𝐵 𝑥̂ + 𝑦𝐵 𝑦̂ + 𝑧𝐵 𝑧̂ ) = 𝑥𝐴 𝑥𝐵 𝑥̂ ∙ 𝑥̂ + 𝑥𝐴 𝑦𝐵 𝑥̂ ∙ 𝑦̂ + 𝑥𝐴 𝑧𝐵 𝑥̂ ∙ 𝑧̂ + 𝑦𝐴 𝑥𝐵 𝑦̂ ∙ 𝑥̂ + 𝑦𝐴 𝑦𝐵 𝑦̂ ∙ 𝑦̂ + 𝑦𝐴 𝑧𝐵 𝑦̂ ∙ 𝑧̂ + 𝑧𝐴 𝑥𝐵 𝑧̂ ∙ 𝑥̂ (7) +𝑧𝐴 𝑦𝐵 𝑧̂ ∙ 𝑦̂ + 𝑧𝐴 𝑧𝐵 𝑧̂ ∙ 𝑧̂ = 𝑥𝐴 𝑥𝐵 + 𝑦𝐴 𝑦𝐵 + 𝑧𝐴𝑧𝐵 . É importante ressaltar, o resultado de um produto escalar é sempre um escalar, |⃗⃗⃗ 𝑟𝐴 ||⃗⃗⃗ 𝑟𝐵 |cos𝜃 = 𝑥𝐴 𝑥𝐵 + 𝑦𝐴 𝑦𝐵 + 𝑧𝐴 𝑧𝐵 é uma grandeza escalar (número). Produto Vetorial A notação do produto escalar entre vetores é o ×. Suponha 2 vetores ⃗⃗⃗ 𝑟𝐴 e ⃗⃗⃗ 𝑟𝐵 com um ângulo θ entre eles, o produto escalar entre eles é definido como 𝑥̂ 𝑟𝐴 × ⃗⃗⃗ ⃗⃗⃗ 𝑟𝐵 = | 𝑥𝐴 𝑥𝐵 𝑦̂ 𝑦𝐴 𝑦𝐵 𝑧̂ 𝑧𝐴 |. 𝑧𝐵 (8) Vale lembrar que o produto vetorial é resulta em uma grandeza vetorial (um vetor), onde a direção do vetor resultante é sempre normal ao plano definido pelos vetores ⃗⃗⃗ 𝑟𝐴 e ⃗⃗⃗ 𝑟𝐵 . Quanto ao sentido, é necessário realizar a regra da mão direita que será apresentada durante a aula. Quanto ao módulo do produto vetorial, ele é dado por: |⃗⃗⃗ 𝑟𝐴 × ⃗⃗⃗ 𝑟𝐵 | = |⃗⃗⃗ 𝑟𝐴 ||⃗⃗⃗ 𝑟𝐵 |sin𝜃. (9) Em muitas situações, calcular o determinante da eq. (8) é complicado, porém veremos nesse curso diversas situações em que é mais fácil utilizar a propriedade distributiva da multiplicação para fazer esse produto. Porém antes disso é definir o produto entre os versores de x, y e z como: 𝑥̂ × 𝑥̂ = 0 𝑥̂ × 𝑦̂ = 1 𝑥̂ × 𝑧̂ = −1 𝑦̂ × 𝑥̂ = −1 𝑦̂ × 𝑦̂ = 0 𝑦̂ × 𝑧̂ = 1 𝑧̂ × 𝑥̂ = 1 𝑧̂ × 𝑦̂ = −1 𝑧̂ × 𝑧̂ = 0 Conforme visto, a maior complicação da tabela acima é determinar o sinal + ou – do produto cruzado entre os vetores. Para isto, pode-se utilizar a regra do “xyzxy”. Sempre que a ordem do produto aparecer da esquerda para direita, o resultado é positivo, e negativo caso contrário. Por exemplo: 𝑦̂ × 𝑧̂ aparece da direita para esquerda em “xyzxy”, logo o resultado é +1. Porém 𝑧̂ × 𝑦̂ aparece da direita para a esquerda em “xyzxy”, logo o resultado é -1. Dúvidas quanto a este método podem ser tiradas na sala de aula. Vale ressaltar que caso o aluno não esteja confortável com este truque, basta utilizar a eq. (8) para calcular o produto vetorial. Pela propriedade distributiva, 𝑟𝐴 × ⃗⃗⃗ ⃗⃗⃗ 𝑟𝐵 = (𝑥𝐴 𝑥̂ + 𝑦𝐴 𝑦̂ + 𝑧𝐴𝑧̂ ) × (𝑥𝐵 𝑥̂ + 𝑦𝐵 𝑦̂ + 𝑧𝐵 𝑧̂ ) = 𝑥𝐴 𝑥𝐵 𝑥̂ × 𝑥̂ + 𝑥𝐴 𝑦𝐵 𝑥̂ × 𝑦̂ + 𝑥𝐴 𝑧𝐵 𝑥̂ × 𝑧̂ + 𝑦𝐴 𝑥𝐵 𝑦̂ × 𝑥̂ + 𝑦𝐴 𝑦𝐵 𝑦̂ × 𝑦̂ + 𝑦𝐴 𝑧𝐵 𝑦̂ × 𝑧̂ + 𝑧𝐴 𝑥𝐵 𝑧̂ × 𝑥̂ (10) +𝑧𝐴 𝑦𝐵 𝑧̂ × 𝑦̂ + 𝑧𝐴 𝑧𝐵 𝑧̂ × 𝑧̂ = 𝑥̂ (𝑦𝐴 𝑧𝐵 − 𝑧𝐴𝑦𝐵 )𝑥̂ − (𝑥𝐴 𝑧𝐵 − 𝑧𝐴 𝑥𝐵 )𝑦̂ + (𝑥𝐴 𝑦𝐵 − 𝑦𝐴 𝑥𝐵 )𝑧̂ = | 𝑥𝐴 𝑥𝐵 𝑦̂ 𝑦𝐴 𝑦𝐵 𝑧̂ 𝑧𝐴 | . 𝑧𝐵 4. Funções Escalares e funções Vetoriais No contexto desse curso de eletromagnetismo, iremos trabalhar com dois tipos de funções: as funções escalares e as funções vetoriais. Ainda neste contexto, trabalharemos ainda com funções que serão definidas no espaço (𝑟) e no tempo (t), logo as funções serão definidas para cada ponto no espaço e no tempo. A princípio, na parte de eletro e magnetoestática, não utilizaremos a dependência temporal, porém ela entra a partir da terceira parte do curso. • • • Funções escalares 𝑓(𝑟, 𝑡) são funções que definem uma variável escalar para cada ponto do espaço (𝑟) e tempo (t). Exemplos de funções escalares são distribuições de temperatura (𝑇(𝑟, 𝑡)), cargas elétricas (𝜌(𝑟, 𝑡)), potencial elétrico (𝑉(𝑟, 𝑡)), entre outros. Funções vetoriais 𝑓 (𝑟, 𝑡) são funções que definem uma variável vetorial para cada ponto do espaço (𝑟) e tempo (t). Exemplos de funções vetoriais são distribuições de velocidade em um fluido (𝑣 (𝑟, 𝑡)), ⃗ (𝑟, 𝑡)), entre outros. Podemos escrever a função vetorial campo elétrico (𝐸⃗ (𝑟, 𝑡)), campo magnético (𝐻 como uma soma de funções escalares, uma função definida para cada eixo das coordenadas, i.e., 𝑓 (𝑟, 𝑡) = 𝑓𝑥 (𝑟 , 𝑡)𝑥̂ + 𝑓𝑦 (𝑟, 𝑡)𝑦̂ + 𝑓𝑧 (𝑟, 𝑡)𝑧̂ É importante ressaltar que existe grandezas escalares e vetoriais que são definidas apenas em um ponto específico no espaço, essas grandezas, no contexto desse curso não serão definidas como funções. Um exemplo é o vetor força, cargas elétricas pontuais, vetor de velocidade de cargas pontuais, entre outros. Obs.: Existem ferramentas matemáticas para definir essas grandezas como funções, porém não serão adotadas neste curso. 5. Operações diferenciais espaciais em funções escalares e vetoriais Antes de definir as operações, é importante definir o operador diferencial em coordenadas cartesianas, ⃗∇= d 𝑥̂ d𝑥 + d 𝑦̂ d𝑦 + d 𝑧̂ . d𝑧 (11) Sendo ⃗∇, um vetor, é possível aplicar o operador de três formas nas funções escalares e vetoriais, onde cada possibilidade recebe um nome específico: ⃗ e uma função escalar 𝑓(𝑟 , 𝑡); 1) Gradiente: Produto escalar entre ∇ ⃗ e uma função vetorial 𝑓 (𝑟, 𝑡); 2) Divergente: Produto escalar entre ∇ ⃗ e uma função vetorial 𝑓 (𝑟, 𝑡); 3) Rotacional: Produto vetorial entre ∇ Gradiente Conforme explicado, o gradiente é definido pelo produto escalar entre ⃗∇ e uma função escalar 𝑓(𝑟, 𝑡), i.e., ⃗∇𝑓(𝑟, 𝑡) = d𝑓(𝑟,𝑡) 𝑥̂ + d𝑓(𝑟,𝑡) 𝑦̂ + d𝑓(𝑟,𝑡) 𝑧̂ . d𝑥 d𝑦 d𝑧 (12) Nota-se que o gradiente de uma função escalar é sempre uma função vetorial, tendo uma função escalar definida para cada eixo das coordenadas x, y e z. Fisicamente, a função vetorial resulta de dessa operação representa a direção de crescimento da função 𝑓(𝑟 , 𝑡), ou seja, o vetor resultante aponta para a direção onde no ponto 𝑟, 𝑡 a função tem maior taxa de crescimento com magnitude proporcional a esse crescimento. Um exemplo pode ser observado na Fig. 3 (a). Divergente Conforme explicado, o divergente é definido pelo produto escalar entre ⃗∇ e uma função vetorial 𝑓 (𝑟, 𝑡), i.e., ⃗∇𝑓 (𝑟, 𝑡) = d𝑓𝑥 (𝑟,𝑡) + d𝑓𝑦 (𝑟,𝑡) + d𝑓𝑧 (𝑟,𝑡). d𝑥 d𝑦 (13) d𝑧 Nota-se que o divergente de uma função vetorial é sempre uma função escalar. Fisicamente, a função vetorial resulta de dessa operação representa o fluxo de campo que entra ou sai de um volume infinitesimal definido no ponto 𝑟, 𝑡. Por exemplo, se 𝑣 (𝑟, 𝑡) a velocidade de um fluido, o divergente dessa função nos dá variação do fluxo do fluído volume infinitesimal definido no ponto 𝑟, 𝑡, conforme apresentado na Fig. 3 (b). Rotacional Conforme explicado, o rotacional é definido pelo produto vetorial entre ⃗∇ e uma função vetorial 𝑓 (𝑟, 𝑡), i.e., 𝑥̂ 𝑦̂ 𝑧̂ d d𝑥 d d𝑦 d d𝑧 𝑓𝑧 (𝑟, 𝑡) 𝑓𝑦 (𝑟 , 𝑡) 𝑓𝑧 (𝑟, 𝑡) ⃗ × 𝑓 (𝑟 , 𝑡) =× ⃗⃗⃗ ∇ 𝑟𝐵 = | |. (14) Nota-se que o rotacional de uma função vetorial é sempre uma função vetorial. Fisicamente, a função vetorial resulta de dessa operação representa à tendência ou giro do vetor 𝑓 (𝑟, 𝑡) no ponto 𝑟, 𝑡. Para todas as operações acima, vale ressaltar que a propriedade distributiva pode ser aplicada conforme explicado na sessão dos produtos vetoriais e escalares. Por fim, algumas propriedades do gradiente, divergente e do rotacional: ⃗∇[𝑓(𝑟, 𝑡) + 𝑔(𝑟 , 𝑡)] = ⃗∇𝑓(𝑟, 𝑡) + ⃗∇𝑔(𝑟, 𝑡) ⃗∇[𝑓 (𝑟, 𝑡) + 𝑔(𝑟, 𝑡)] = ⃗∇𝑓 (𝑟, 𝑡) + ⃗∇𝑔(𝑟, 𝑡). ⃗ × [𝑓 (𝑟, 𝑡) + 𝑔(𝑟, 𝑡)] = ∇ ⃗ × 𝑓 (𝑟, 𝑡) + ∇ ⃗ × 𝑔(𝑟, 𝑡). ∇ ⃗∇[𝑔(𝑟, 𝑡)𝑓 (𝑟, 𝑡)] = [∇ ⃗ 𝑔(𝑟, 𝑡)]𝑓 (𝑟, 𝑡) + 𝑔(𝑟, 𝑡)[∇ ⃗ 𝑓 (𝑟, 𝑡)] ⃗∇ × [𝑔(𝑟, 𝑡)𝑓 (𝑟, 𝑡)] = [∇ ⃗ 𝑔(𝑟, 𝑡)] × 𝑓 (𝑟, 𝑡) + 𝑔(𝑟 , 𝑡)[∇ ⃗ × 𝑓 (𝑟, 𝑡)] ⃗ [∇ ⃗ × 𝑓 (𝑟, 𝑡)] = 0 ∇ ⃗ × [∇ ⃗ 𝑓(𝑟, 𝑡)] = 0 ⃗ ∇ (a) - Gradiente (b) - Divergente Figura 3 – Interpretação física do gradiente (a) e do divergente (b). (a) foi retirada da wikipedia. (15) 6. Operador Laplaciano O Operador Laplaciano é o operador diferencial de segunda ordem, e é definido o produto escalar entre ⃗∇ com ⃗ , i.e., como: ∇ ⃗∇ ⃗= ∆= ∇ d2 d𝑥 2 + d2 d𝑦 2 + d2 . d𝑧 2 (16) Note que ∆ é um operador escalar. Sendo assim, podemos aplicar o operador ∆ tanto a uma função escalar quando a uma função vetorial. Escalar Quando ∆ é aplicado a uma função escalar 𝑓(𝑟, 𝑡), o resultado é sempre uma função escalar. Lembre-se, o produto de dois escalares sempre resulta em um escalar. Com isso, ∆𝑓(𝑟, 𝑡) = d2 𝑓(𝑟,𝑡) d𝑥 2 + d2 𝑓(𝑟,𝑡) d𝑦 2 + d2 𝑓(𝑟,𝑡) . d𝑧 2 (17) Vetorial Quando ∆ é aplicado a uma função escalar 𝑓 (𝑟, 𝑡), o resultado é sempre uma função vetorial. Com isso, ∆𝑓 (𝑟, 𝑡) = [∆𝑓𝑥 (𝑟, 𝑡)]𝑥̂ + [∆𝑓𝑦 (𝑟, 𝑡)]𝑦̂ + [∆𝑓𝑧 (𝑟, 𝑡)]𝑧̂ . (18) Assim como o divergente, gradiente e o rotacional, o Laplaciano também possui algumas propriedades, das quais podemos destacar: ∆[𝑓(𝑟, 𝑡) + 𝑔(𝑟 , 𝑡)] = ∆𝑓(𝑟, 𝑡) + ∆𝑔(𝑟, 𝑡) ∆[𝑓 (𝑟, 𝑡) + 𝑔(𝑟, 𝑡)] = ∆𝑓 (𝑟, 𝑡) + ∆𝑔(𝑟, 𝑡). ⃗ [∇ ⃗ 𝑓 (𝑟, 𝑡)] − ∇ ⃗ × [∇ ⃗ × 𝑓 (𝑟, 𝑡)]. ∆𝑓 (𝑟, 𝑡) = ∇ (19)