Convertidores DC-DC en Dos Cuadrantes: Práctica de Laboratorio
advertisement

LABORATORIO DE CONVERSORES
ESTÁTICOS
César Chillán-LCE_GR2_1
Práctica 8: CONVERTIDORES DC-DC EN DOS CUADRANTES
Ingeniería Eléctrica y Electrónica, Escuela Politécnica Nacional
Quito, Ecuador
cesar.chillan@epn.edu.ec
Resumen – En el desarrollo de esta práctica se comprobará el
funcionamiento de esta topología de convertidor que esta
fundamentalmente conformado por el acople de dos tipos de
convertidores ya estudiados, los cuales son: la configuración
Buck y la configuración Boost.
Por lo tanto, para conseguir dicho frenado es necesaria la
utilización de troceadores que permitan la circulación de
corriente entre la carga y la fuente en los dos sentidos. Es
aquí donde interviene el convertidor clase C.
La técnica de control del convertidor DC-DC de dos
cuadrantes puede ser con control simultáneo y con control no
simultáneo. En esta práctica se analizará el funcionamiento
utilizando un control no simultáneo.
INTRODUCCIÓN
En [4], Supongamos que estamos controlando un pequeño
motor eléctrico con un único sentido de giro, utilizando un
troceador reductor (step-down), con el cual es posible
variar su velocidad de giro. Para el frenado, utilizaríamos
en principio componentes auxiliares para realizar un
frenado dinámico, en el que la energía cinética del motor
se disipa en forma de calor en una resistencia.
Sin embargo, con este tipo de frenado se desperdicia
energía, por lo que, si queremos mejorar el rendimiento,
debemos implementar un circuito que permita un frenado
regenerativo del motor. Este frenado consiste en recuperar
una parte de la energía mecánica del motor devolviéndola
hacia la fuente de alimentación, y se consigue haciendo que
el motor, actuando como un generador, fuerce una
corriente hacia la batería. En el troceador directo (stepdown) la conexión entre la fuente y el motor se realiza
mediante un diodo que no permite la inversión de la
corriente ni, por tanto, el frenado regenerativo del motor.
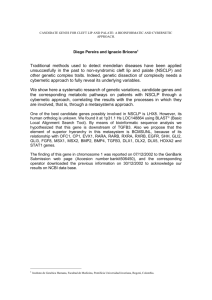
Fig.2 Convertidor DC-DC de dos cuadrantes.
El modo de trabajo del convertidor lo representaremos en
una gráfica de corriente-tensión, tal y como lo hemos hecho
para anteriores convertidores. Cuando el troceador
funciona en el primer cuadrante la tensión en la carga y la
corriente son ambas positivas, funcionando el motor en
tracción. Cuando lo hace en el segundo cuadrante la tensión
de carga es positiva y la corriente negativa, produciéndose
el frenado regenerativo del motor. En la Fig.1 se ilustra el
funcionamiento del motor controlado con el convertidor
clase C, mientras que en la Fig.2 se muestra el esquema de
dicho convertidor.
Trabajo Preparatorio
A. Analizar el principio de operación y la secuencia de
funcionamiento de la configuración del convertidor
DC/DC de dos cuadrantes mostrada en la Fig.3 con
control no simultáneo.
Fig.3 Convertidor DC/DC tipo A en 2 cuadrantes
Fig.1 Control en dos cuadrantes, motor DC.
•
Funcionamiento:
Si se analiza el funcionamiento en modo no simultáneo,
se tendría las siguientes formas de onda:
En [4], En este convertidor la corriente en la carga puede
ser positiva o negativa, mientras que el voltaje en la misma
es siempre positivo. El circuito no es más que una
combinación de un convertidor reductor (tipo A), y una
regenerativo (tipo B). El interruptor S1 y el diodo D1
operan como convertidor reductor, mientras que S2 y D2
lo hacen como regenerativo. Debe tenerse cuidado de no
cerrar los dos interruptores al mismo tiempo, ya que esto
colocaría a la fuente en cortocircuito.
Ahora estudiando los semiconductores que conducen en
cada intervalo, así como los circuitos por los que circula la
corriente de la carga 𝐼𝑜 , durante un ciclo de funcionamiento
del convertidor.
1.
2.
3.
4.
𝑡1 − 𝑡2 : Conduce 𝑆1 (𝑆1 cerrado y 𝑆2 abierto).
Circuito: Fuente-𝑆1 -carga. 𝐼𝑜 creciente
exponencialmente desde 0.
𝑡2 − 𝑡3 : Conduce 𝐷1 (𝑆1 abierto y 𝑆2 cerrado).
Circuito: Carga-𝐷1 . 𝐼𝑜 exponencialmente
decreciente desde Imax hasta 0, forzada por la
energía magnética almacenada en la bobina.
𝑡3 − 𝑡4 : Conduce 𝑆2 (𝑆1 abierto y 𝑆2 cerrado).
Circuito: Carga-𝑆2 . 𝐼𝑜 Negativa, forzada por la
fuerza contraelectromotriz del motor (V), con
valor absoluto exponencialmente creciente desde
0 hasta Imin.
𝑡4 − 𝑡5 : Conduce 𝐷2 (𝑆1 cerrado y 𝑆2 abierto).
Circuito: Carga-𝐷2 -fuente. 𝐼𝑜 Negativa, en contra
de la batería, es una corriente regenerativa,
forzada por la energía magnética almacenada en
la parte inductiva de la carga en serie con la
f.e.m del motor de valor absoluto
exponencialmente decreciente desde Imin hasta
anularse.
Fig.5 Formas de onda de trabajo en el primer cuadrante
Fig.6 Formas de onda de trabajo en el segundo cuadrante
B. Diseñar y traer armado el circuito de control y
potencia del convertidor DC/DC en dos cuadrantes,
para operación solamente en el primer cuadrante.
Este es un control PWM.
Fig.4 Formas de onda de trabajo en 2 cuadrantes
Para implementar el circuito de control se utilizó la tarjeta
embebida Arduino Mega, ya que esta posee más de un
Timer de 16bits y cada uno de estos Timers poseen 3
canales para realizar comparaciones, además que tiene una
ejecución de 1CM igual a 62,5nseg. En la Fig.9 se muestra
el diagrama de flujo para realizar el control del conversor
DC/DC reductor. No se utilizarán los pines de salida de los
comparadores para generar formas de onda, mas bien se
utilizará un Timer para generar una base tiempo que
mediante las interrupciones de los comparadores se
cambiaria el estado de un Pin del Arduino Mega.
•
else
{
Bandera='A';
digitalWrite(LED_FREQ,HIGH);
digitalWrite(LED_Delta,LOW);
}
Diagrama de flujo:
}
Fig.7 Diagrama de flujo del programa de control por PWM
•
Programación de las señales control:
#include <avr/io.h>
#include <avr/interrupt.h>
#define LED_FREQ 14
#define LED_Delta 15
#define pwm_control 50
#define Canal_1 A1
#define Canal_2 A2
#define alpha 0.1
#define Selector 2
int Lectura;
int adc_filtrado = 0;
float delta=0.9;
int Bandera='A';
void setup() {
pinMode(LED_FREQ,OUTPUT);
pinMode(LED_Delta,OUTPUT);
pinMode(pwm_control,OUTPUT);
pinMode(Selector,INPUT_PULLUP);
digitalWrite(pwm_control,HIGH);
digitalWrite(LED_FREQ,HIGH);
digitalWrite(LED_Delta,LOW);
//Activo modo Fast PWM en las salidas
OC5A=46,OC5B=45,OC5C=44 (esos pines son de la PLACA)
cli();
//Configuración INT4
EICRB=_BV(ISC41)|_BV(ISC40);//Detección de flanco de
subida
EIMSK=_BV(INT4);//Habilito la interrupcion INT0
EIFR=_BV(INTF4);//Bajo manualmente la bandera de la
interrupcion
//Configuracion Señal de Control
TCCR5A=0;
TCCR5B=_BV(WGM52)|_BV(CS51);//Modo Fast PWM y
preescalador 1/8
OCR5A=19999;
OCR5B=delta*(OCR5A+1);
TIMSK5=_BV(OCIE5A)|_BV(OCIE5B);
sei();
void loop()
{
if (Bandera=='A')
{
Lectura = analogRead(Canal_1); // read the input
pin
adc_filtrado = (alpha*Lectura) + ((1alpha)*adc_filtrado);
OCR5A=map(adc_filtrado,0,1013,199,19999);
OCR5B=delta*(OCR5A+1);
}
else
{
Lectura = analogRead(Canal_2); // read the input
pin
adc_filtrado = (alpha*Lectura) + ((1alpha)*adc_filtrado);
delta=0.00078973*adc_filtrado+0.1;
OCR5B=delta*(OCR5A+1);
}
}
-Para el mosfet:
La corriente 𝐼𝑑𝑚𝑎𝑥 = 5𝐴 y el 𝑉𝑑𝑠 = 180𝑉
𝑃𝑚𝑜𝑠𝑓𝑒𝑡 = 𝑅𝑑𝑠𝑜𝑛 ∙ 𝐼𝑑 2
Para el mosfet IRF640, se tiene un 𝑅𝑑𝑠𝑜𝑛 = 0.18Ω
𝑃𝑚𝑜𝑠𝑓𝑒𝑡 = 0.18 ∙ 52 = 4.5𝑊
También este mosfet tiene las siguientes características:
𝑉𝑑𝑠 = 200𝑉
𝐼𝑑𝑚𝑎𝑥 = 18𝐴
𝑃𝑚𝑎𝑥 = 125𝑊
Por lo tanto, se utilizará el IRF640.
-Dimensionamiento del diodo:
El diodo debe conducir una Imax=5A, por lo que se
utilizará un diodo de recuperación rápida MUR1520, el
cual soporta una corriente de 15A y un voltaje inverso
repetitivo de 200V.
}
ISR(TIMER5_COMPA_vect)
{
digitalWrite(pwm_control,HIGH);
}
ISR(TIMER5_COMPB_vect)
{
digitalWrite(pwm_control,LOW);
}
ISR(INT4_vect)
{
delay(10);
if (Bandera=='A')
{
Bandera='B';
digitalWrite(LED_FREQ,LOW);
digitalWrite(LED_Delta,HIGH);
}
C. Diseñar y traer armado el circuito de control y
potencia del convertidor DC/DC en dos cuadrantes,
para operación en el cuarto cuadrante; este es un
control de rizado de corriente en donde pueda
seleccionarse el nivel de Imax e Imin. La carga es un
motor DC de 180V, 5 A, el control de rizado será
diseñado para una corriente Imax e Imin ajustables
(RLT; y RUT. En el diagrama superior). El sensado de
corriente se lo hará con una resistencia de 1 Ohm o
menor en serie con el motor DC.
Para obtener las expresiones mas importantes que
describen el funcionamiento de este conversor se utilizarán
las gráficas de la Fig.5 (funcionamiento en el primer
cuadrante) y de la Fig.6 (Funcionamiento en el segundo
cuadrante).
La corriente de salida en el intervalo 0 < 𝑡 < 𝑇𝑜𝑛 tendrá el
valor dado por la siguiente ecuación:
𝑖𝑜 =
𝑅
𝐸−𝑉
𝐸−𝑉
+ (𝐼𝑀𝐼𝑁 −
) ∙ 𝑒 −𝑡∙ 𝐿
𝑅
𝑅
En el intervalo 𝑇𝑜𝑛 < 𝑡 < 𝑇 la corriente tendrá este valor:
Fig.9 Procedimiento de calibración y secuencia de operación
𝑖𝑜 = −
𝑅
𝑉
𝑉
+ (𝐼𝑀𝐴𝑋 + ) ∙ 𝑒 −(𝑡−𝑇𝑜𝑛)∙ 𝐿
𝑅
𝑅
Los valores de Imax e Imin vienen dados de combinar las
ecuaciones anteriores:
𝑇𝑜𝑛∙
𝐼𝑀𝐼𝑁 =
𝑅
𝐿
− 1) 𝑉
𝐸 (𝑒
∙
−
𝑅
𝑅
𝑅
(𝑒 𝑇∙ 𝐿 − 1)
𝑅
𝑒 −𝑇𝑜𝑛∙ 𝐿 )
𝐼𝑀𝐴𝑋 =
𝐸 (1 −
𝑉
∙
−
𝑅
𝑅
𝑅
(1 − 𝑒 −𝑇∙ 𝐿 )
Si Imin e Imax son positivas, el troceador funcionará en el
primer cuadrante, y la corriente media de salida Io será
positiva. Por el contrario, si ambas intensidades son
negativas, como en el caso de la Fig.6, el troceador
funcionará en el segundo cuadrante, e Io será negativa.
Para el sensado de corriente se emplea una resistencia de
1ohm, la corriente en condiciones nominales del motor es
5A, por lo tanto, utilizando ley de ohm se tiene:
𝐸 𝑖𝑛−𝑚𝑎𝑥 = 𝑅 𝑐𝑜𝑛𝑡𝑟𝑜𝑙 ∗ (𝐼𝑜 )
𝐸 𝑖𝑛−𝑚𝑎𝑥 = 5𝑉
Y de esta forma se tiene el voltaje máximo de entrada que
es igual a 5V.
Del análisis del funcionamiento de este circuito de control
se llega a la conclusión que para fijar los voltajes VUT y
VLT se lo hace a través de un divisor de tensión mostrado
en la Fig.10
Para el control de operación en el segundo cuadrante se
empleará el circuito de la Fig.8 el cuál es un controlador
con dos puntos de ajuste independientes
Fig.9 Circuitos de ajuste de VUT y VLT
Se analiza la fórmula de VUT teniendo el máximo valor de
resistencia del potenciómetro, se tiene
𝑉𝑢𝑡 𝑚𝑎𝑥 = 15 ∗
𝑅𝑢𝑡 𝑚𝑎𝑥
𝑅𝑢𝑡 𝑚𝑎𝑥 + 10𝐾 Ω
𝑉𝑢𝑡 𝑚𝑎𝑥 = 5 V
Fig.8 Circuito de control para trabajar en el segundo cuadrante
Este circuito de control necesita de una calibración previa
para su funcionamiento, en la Fig.9 se muestra un diagrama
de flujo que explica la forma de calibrar los limites superior
e inferior de voltaje de control.
Por lo tanto, con un potenciómetro de 5kohm se puede
ajustar el voltaje de la ventana de histéresis para controlar
que el frenado regenerativo del motor se mantenga dentro
de los 5A.
D. Dibujar las formas de onda que esperamos en los
circuitos de los numerales A y B. Comprobar sus
estimaciones por medio de simulaciones y traer los
resultados impresos.
Fig.15 Voltaje en la carga
Fig.10 Circuito de funcionamiento en el primer cuadrante
Fig.16 Corriente en la carga
Fig.11 Voltaje en la carga
Fig.17 Corriente en el mosfet
REFERENCIAS
Fig.12 Corriente en la carga
[1] Apuntes de Electrónica de potencia, Ing. Patricio Chico
[2] Power Electronics: Devices, Drivers, Applications, and Passive
Components-Barry
Wayne
Williams
[Online],
Available:
http://personal.strath.ac.uk/barry.williams/book.htm
[3]http://scielo.sld.cu/scielo.php?script=sci_arttext&pid=S181559012012000200006
[4] Electrónica de potencia, Juan D. Aguilar Peña, Escuela Politécnica
Superior (Universidad de Jaén), 2005.
Fig.13 Corriente en el mosfet
[5] Electrónica de potencia, Daniel W. Hart, 1ra edición, Prentice hall
[6] Amplificadores operacionales y circuitos integrados lineales, Robert
F. Coughlin, Prentice hall
Fig.14 Circuito de funcionamiento en el segundo cuadrante