Chapter
TEN
Moment-Distribution Method
10.1 Introduction
The moment-distribution method was originally presented by
Prof. Hardy cross in 1930 and is considered one of the most
important contributions ever made to the structural analysis
of continuous beams and rigid frames.
The moment-distribution is a method of successive
approximations that may be carried out to any desired degree
of accuracy. Essentially, the method begins by assuming
each joint of a structure is fixed. Then, by unlocking and
locking each joint in succession, the internal moments at the
joints are distributed and balanced until the joints have
rotated to their final or nearly final positions.
243
Chapter Ten
10.2 General Principles and Definitions
Before developing the procedures of the moment-distribution
method, it is necessary to adopt a sign convention and define
the various terms used in the analysis.
Sign Convention
In applying the moment-distribution method, we will adopt
the same sign convention as used previously for the slopedeflection method: Clockwise moments that act on member
ends are considered positive, whereas counterclockwise
moment are negative.
Fixed-End Moments (F.E.Ms)
The moments at the fixed end of a loaded member are called
fixed-end moments. These moments can be determined from
Table (9.1) of the preceding chapter, depending upon the
type of loading on the member.
Member Stiffness Factor (kij)
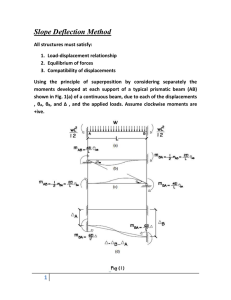
Consider a prismatic beam AB, which is hinged at end A and
fixed at end B, as shown in Fig. (10.1-a). If we apply a
moment M at the end A, the beam rotates by an angle θ at the
hinged end A and develops a moment MBA at the fixed end
B, as shown in the figure. In Chapter 9 we related M to θ
using the conjugate beam method. This resulted in Eq. (9.6),
that is,
242
Moment-Distribution Method
MBA=carryover
moment
M=applied
moment
θ
(a)
B
A
L
EI=constant
M=applied
moment
A
B
θ
(b)
L
EI=constant
Real beam
M/EI
(c)
A'
RA'
B'
L
Conjugate beam
RB'
Figure (10.1)
The term
is referred to as the stiffness factor at A and can be defined as
the moment that must be applied at the end A of the member
to cause a unit rotation (
) at A.
244
Chapter Ten
Now, suppose that the far end B of the beam is hinged,
as shown in Fig. (10.1-b). The relationship between the
applied moment M and the rotation θ of the end A of the
beam can be determined by using the conjugate beam
method, as illustrated in Fig. (10.1-b), that is
This expression indicates that the stiffness factor of the
member at A for this case is
Thus it may summarized that the stiffness factor of a member
ij at the end i is given by
if far end j of member is fixed
(10.1)
if far end j of member is hinged
(10.2)
Carry-Over Moment (C.O.M.)
Let us considered again the hinged-fixed beam in Fig. (10.1a). When a moment M is applied at the hinged end A of the
beam, a moment MBA develops at the fixed end B, as shown
in the figure. The moment MBA is termed the carryover
moment. It was shown in Chapter 9 that:
243
Moment-Distribution Method
(Eq. 9.6)
and
(Eq. 9.7)
or
(10.3)
This equation indicates that, when a moment of magnitude M
is applied at one end of a beam, one-half of the applied
moment is carried over to the far end, provided that the far
end is fixed. Note that the direction of the carryover moment,
MBA, is the same as the applied moment, M.
When the far end of the beam is hinged, as shown in
Fig. (10.1-b), the carry over moment MBA is zero. Thus we
can express the carryover moment as
{
(10.4)
The ratio of the carryover moment to the applied
⁄
moment (
is called the carryover factor of the
member. It represents the fraction of the applied moment M
that is carried over to the far end of the member. Thus we can
express the carryover factor (COF) as
{
(10.5)
243
Chapter Ten
Distribution Factor (D.F)
When an external moment is applied to a joint of a structure
where two or more members meet, an important question that
arises is how to distribute this moment among the various
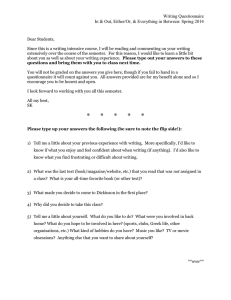
members connected at that joint. Consider the joint B show
in Fig. (10.2-a) at which three members meet, and suppose
that a moment M is applied to this joint, causing it to rotate
by an angle θ. To determine what fraction of the applied
moment M is resisted by each of the three members
connected to the joint, we draw the free-body diagram of
joint B as show in Fig. (10.2-b). By considering the moment
equilibrium of joint B (that is, ∑
), we have
C
M
A
θ
θ
B
M
θ
MBC
MBA
B
MBD
(a)
(b)
D
Figure (10.2)
243
Moment-Distribution Method
or
(10.6)
The moments at the ends B of the members can be expressed
in terms of the joint rotation θ and the stiffness factor k of the
members, Eqs. (10.1) and (10.2), as
(10.7)
(10.8)
(10.9)
Substituting these equations into Eq. (10.6), we obtain
(
or
∑
where ∑
(10.10)
and represents the sum of the
stiffnesses of all the members connected to joint B. From Eq.
(10.10) we can write
(10.11)
∑
The above equations, Eqs. (10.7) to (10.9), can now be
written as
∑
∑
243
Chapter Ten
∑
⁄∑ ,
The ratios
⁄∑ , and
⁄∑
indicate the
portions of the moment M that are resisted by members BA,
BC, and BD, respectively. The ratio ⁄∑ for a member ij is
termed the distribution factor (D.F) of the member and it will
be given the symbol d, that is
∑
(10.12)
The distribution factor for a member is thus equal to the
stiffness of the member divided by the sum of the stiffnesses
of all members meeting at the joint.
10.3 Procedure for Analysis
The procedure for the analysis of structures by the momentdistribution method can be summarized as follows:
1.
The joints on the structure should be identified.
2.
Compute the fixed-end moments. Assuming that all the
free joints are clamped against rotation, evaluate for
each member, the fixed-end moments due to the
external loads and support settlements (if any) by using
the fixed-end moment expressions given in Table (9.1)
of Chapter 9.
3.
Calculate the distribution factors. The stiffness factors
for each member of the structure at the joints should be
243
Moment-Distribution Method
calculated. Using these values the distribution factors
can be determined from Eq. (10.12). Remembering that
the distribution factor is zero for a fixed end and one for
an end roller or hinged support. The sum of all the
distribution factors at a joint must equal 1.
4.
Balance the moments at all the joints that are free to
rotate by applying the moment-distribution process as
follows:
a. At each joint, evaluate the unbalanced moment and
distribute it to the members connected to the joint.
The distributed moment at each member end rigidly
connected to the joint is obtained by multiplying the
negative of the unbalanced moment by the
distribution factor for the member end.
b. Carryover one-half of each distributed moment to the
opposite (far) end of the member.
c. Repeat steps (4-a) and (4-b) until either all the free
joints are balanced or the unbalanced moments at
these joints are negligibly small.
5.
Determine the final
member end moments by
algebraically summing the fixed-end moment and all the
distributed and carryover moments at each member end.
If the moment distribution has been carried out
correctly, then the final moments must satisfy the
233
Chapter Ten
equations of moment equilibrium at all joints of the
structure that are free to rotate.
6.
Compute member end shearing forces and axial forces
by considering the equilibrium of the members of the
structure.
7.
Determine support reactions by considering the
equilibrium of the joints of the structure.
8.
Draw the shearing force, axial force, and bending
moment diagrams.
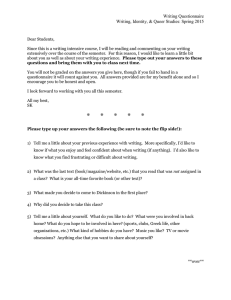
Example 10.1: Draw the bending moment diagram for the
beam shown in Fig. (10.3) by using the moment-distribution
method.
Solution:
First of all the joints are numbered. We have three joints, 1,
2, and 3, which divide the beam into two members.
Fixed-End Moments:
By assuming that joints 1, 2, and 3 are fixed (or locked), we
calculate the fixed-end moments at the ends of each member
due to the external loads, Fig. (10.3-b). By using Table (9.1)
in Chapter 9, we obtain for member 1-2
kN.m
233
Moment-Distribution Method
38 kN
18 kN/m
(a)
1
I
2
3
2m
2m
2I
6m
38 kN
18 kN/m
(b)
1
2
6m
3
38 kN
18 kN/m
(c)
4m
2
2
1
3
+35 kN.m
(d)
2
Unbalanced moment=+35 kN.m
(e)
1
3
2
Carryover moment
Distributed moments
Carryover moment
M12=-54-10=-64 kN.m M21=+54-20=+34 kN.m M32=+19-7.5=+11.5 kN.m
38 kN
18 kN/m
(f)
1
2
M23=-19-15=-34 kN.m
Figure (10.3)
3
233
Chapter Ten
-64
+
_
-34
+
_
(g)
- -11.5
(+B.M. on compression side
-B.M. on tension side)
Figure (10.3) Continued
kN.m
and for member 2-3
kN.m
kN.m
Distribution Factors:
We must determine the distribution factor at the two ends of
each member. Using Eq. (10.1) the stiffness factors at these
ends are
(
(
(
(
232
Moment-Distribution Method
The distribution factor can then be determined for the ends of
member by using Eq. (10.12). At joint 1 and 3, the
distribution factor depends on the member stiffness factor
and the stiffness factor of the fixed support (wall). Since in
theory it would take an infinite size moment to rotate the wall
one radian, the wall stiffness factor is infinite. Thus for joints
1 and 3 we have
and for member ends connected at joint 2 we have
⁄(
⁄(
)
)
Note that the sum of the distribution factors at each joint
must always equal 1.
Balancing Joint 2:
There is a
kN.m fixed-end moment at end 2 of member
(1-2), whereas the end 2 of member (2-3) is subjected to a
kN.m fixed-end moment. Thus the unbalanced moment
UM2 at joint 2 is, Figs. (10.3-c) and (10.3-d)
kN.m
234
Chapter Ten
To balance joint 2, we will apply an equal, but opposite
moment of
kN.m to the joint and allow it to rotate
freely. As a result, portions of this moment are distributed in
members (2-1) and (2-3) in accordance with the distribution
factors of these members at the joint. Specifically, the
distributed moment D.M21 in member (2-1) is
(
kN.m
and that D.M23 in member (2-3) is
(
kN.m
The distributed moment at end 2 of member (2-1)
induces a carryover moment at the far end 1 (Fig. 10.3-e),
which can be determined by multiplying the distributed
moment by the carryover factor of the member. Since joint 1
is fixed, the carryover factor is . Thus the C.O.M at end 1 of
member (1-2) is
(
kN.m
These results are shown in Fig. (10.3-e).
In this particular case only one cycle of moment
distribution is necessary, since no further joints have to be
balanced (or unlocked) to satisfy joint equilibrium.
The final member end moments are obtained by
algebraically summing the fixed-end moment and all the
233
Moment-Distribution Method
distributed and carryover moments at each member end. The
results are depicted in Fig. (10.3-f) and the bending moment
diagram is shown in Fig. (10.3-g).
Since the process of moment distribution, as explained
above, is both long and cumbersome, it is usually convenient
to carry out the analysis in tabular form as shown in Table
(10.1).
Table (10.1)
Joints
1
Members connected to
joint
Distribution factors
Members
12
21
23
32
D.Fs.
0
4/7
3/7
0
Fixed-end moments
F.E.Ms.
-54 +54 -19
Distributed moments
D.Ms.
-20
Carryover moments
C.O.Ms.
-10
Final End
Moments
-64 +34 -34 +11.5
2
3
+19
-15
-7.5
Example 10.2: Draw the bending moment diagram for the
beam shown in Fig. (10.4) by using the moment-distribution
method.
Solution:
Fixed-End Moments:
From Table (9.1) in Chapter 9
233
Chapter Ten
80 kN
(a)
24 kN/m
2
2I
6m
8m
1
3
3I
I
4
6m
6m
+120
+
-28.295
(b)
-93.437 +108 kN.m
_
+
-18.850
_
_
(+B.M. on compression side
-B.M. on tension side)
_
-9.528
Figure (10.4)
kN.m
kN.m
kN.m
kN.m
there is no load on member (3-4)
Stiffness Factors:
From Eq. (10.1),
233
Moment-Distribution Method
Distribution Factors:
From Eq. (10.12),
fixed end
⁄(
⁄(
⁄(
)
⁄(
)
fixed end
Starting with the fixed-end moment, the moments at joints 2
and 3 are balanced and distributed simultaneously. These
moments are then carried over simultaneously to the
respective ends of each member. The resulting moments are
again simultaneously distributed and carried over. The
process is continued until the resulting moments are
diminished an appropriate amount. The resulting moments
are found by summation. The complete analysis is shown in
Table (10.2).
The bending moment diagram is shown in Fig. (10.4-b)
233
Chapter Ten
Table (10.2)
Joints
1
Members
12
21
23
32
34
43
D.Fs.
0
1/3
2/3
3/4
1/4
0
F.E.Ms.
-30
+90
-72
+72
0
0
D.Ms.
0
-6
-12
-54
-18
0
C.O.Ms.
-3
0
-27
-6
0
-9
D.Ms.
0
+9
+18
+4.5
+1.5
0
C.O.Ms.
+4.5
0
+2.25
+9
0
+0.75
D.Ms.
0
-0.75
-1.5
-6.75
+2.25
0
C.O.Ms.
-0.375
0
-3.375
-0.75
0
-1.125
D.Ms.
0
+1.125
+2.25
+0.562
+0.188
0
C.O.Ms.
+0.562
0
+0.281
+1.125
0
+0.094
D.Ms.
0
-0.094
-0.187
-0.844
-0.281
0
C.O.Ms.
-0.047
0
-0.422
-0.094
0
-0.241
D.Ms.
0
+0.141
+0.281
+0.070
+0.024
0
C.O.Ms.
+0.071
0
+0.035
+0.145
0
+0.012
D.Ms.
0
-0.012
-0.023
-0.108
-0.036
0
C.O.Ms.
-0.006
0
-0.054
-0.012
0
-0.018
Final End
Moments
-28.295
+93.410
-93.464
+18.844
-18.855
-9.528
Average
2
3
93.437
4
18.85
10.4 Hinged or Simple Supports at Ends
The analysis of structures, that are hinged or simply
supported at one or more ends, can be considerably
simplified by using Eq. (10.2) to calculate the stiffness
233
Moment-Distribution Method
factors for members adjacent to the hinged or simple end
supports. Also, the joints at the hinged or simple end
supports are balanced only once during the moment
distribution process, after which they are left unclamped so
that no moment can be carried to them as the interior joints
of the structure are balanced.
Example 10.3: Draw the bending moment diagram for the
beam shown in Fig. (10.5). By using the moment-distribution
method.
constant.
80 kN
24 kN/m
(a)
1
5m
3
2
1.25 m 1.25 m
+75 kN.m
-52.5
+
_
-45
_
(b)
+50
+
0
(+B.M. on compression side
-B.M. on tension side)
Figure (10.5)
Solution:
Fixed-End Moments:
From Table (9.1),
kN.m
233
Chapter Ten
kN.m
kN.m
kN.m
Stiffness Factors:
From Eq. (10.1),
From Eq. (10.2),
From Eq. (10.1),
Distribution Factors:
fixed end
⁄(
)
⁄(
)
hinged end
The process of moment distribution is conducted in Table
(10.3), and the bending moment diagram is shown in Fig.
(10.5-b). The final end moments on the last line of Table
233
Moment-Distribution Method
(10.3) are obtained by algebraically summing the modified
fixed-end moment and all the distributed and carryover
moments at each member end (that is each column).
Table (10.3)
Joints
1
2
3
Members
12
21
23
32
D.Fs.
0
2/5
3/5
1
F.E.Ms.
-50
+50
-25
+25
Balance joint (3)
-25
C.O.Ms.
Modified F.E.Ms.
-12.5
-50
D.Ms.
C.O.Ms
Final End
Moments
+50
-37.5
-5
-7.5
-2.5
-52.5
0
0
+45.0
-45.0
0
10.5 Structures with Cantilever Overhangs
Sometimes, a structure may have a cantilever overhang at
one or more ends, Fig. (10.6). In such a case, the bending
moment at end A of the overhanging portion will be due to
the load over this portion and will remain constant,
irrespective of the moments on the other portions of the
structure. Since the overhanging portion AB does not
contribute to the rotational stiffness of joint A, the
distribution factor for its end A is zero. Thus, joint A in Fig.
(10.6-b) can be treated as a simple end support in the
233
Chapter Ten
analysis. The moment at end A of the cantilever, however
does affect the unbalanced moment at joint A, Figs. (10.6-a
and -b) and must be included along with the other fixed-end
moments in the analysis.
P
w
P
w
A
B
A
(a)
B
(b)
Figure (10.6)
Example 10.4: Draw the bending moment diagram for the
beam shown in Fig. (10.7) by using the moment-distribution
method.
constant.
Solution:
Fixed-End Moments:
From Table (9.1),
there is no load on member (1-2)
kN.m
kN.m
kN.m
232
Moment-Distribution Method
30 kN
10 kN/m
(a)
2
1
3
4m
9m
6m
4
(a) Continuous beam
M34=-30*4=-120 kN.m
(b)
30 kN
3
4
30 kN
(b) Statically determinate cantilever portion
-27.5
+13.75
(c)
+27.5
+120
10 kN/m
-120
30 kN
3
4
2
1
(c) Final end moments
+101.25 kN.m
+
-120
_
-27.5
_
(d)
+
+13.75
(d) Bending moment diagram
(+B.M. on compression side
-B.M. on tension side)
Figure (10.7)
Stiffness Factors:
From Eq. (10.1),
From Eq. (10.2),
_
234
Chapter Ten
From Eq. (10.1),
Distribution Factors:
From Eq. (10.12),
fixed end
⁄(
)
⁄(
)
hinged end
Table (10.4) shows the moment distribution process.
Table (10.4)
Joints
1
Members
12
21
23
32
34
D.Fs.
0
2/3
1/3
1
0
F.E.Ms.
0
0
-67.5
+67.5
-120
+52.5
0
+120
-120
2
3
Balance joint (3)
C.O.Ms.
Modified F.E.Ms.
+26.25
0
D.Ms.
C.O.Ms
0
-41.25
+27.5
+13.75
+13.75
Final End Moments +13.75
0
+27.5
-27.5
+120
-120
233
Moment-Distribution Method
10.6 Moment Distribution
Sidesway
for
Frames:
No
The procedure for the analysis of frames without sidesway is
similar to that for the analysis of continuous beams presented
in the preceding sections. However, unlike the continuous
beams, more than two members may be connected to a joint
of a frame. In such cases, care must be taken to record the
computation in such a manner that mistakes are avoided.
Example 10.5: Draw the bending moment diagram for the
frame shown in Fig. (10.8) by using the moment-distribution
method.
Solution:
Fixed-End Moments:
From Table (9.1),
kN.m
kN.m
there is no load on member (2-4)
kN.m
kN.m
kN.m
233
Chapter Ten
2 kN/m
3
2I
4
5
2I
10 m
I
I
1
2
8000.99
40 kN
10 m
(a)
30 m
+225
+
30 m
-205.7
-186.2
_ _
+225
-116 -115.9 _
-19.3 _
+200 +
(b)
-92.1
_
- -9.6
(+B.M. on compression side
-B.M. on tension side)
Figure (10.8)
kN.m
Stiffness Factors:
From Eq. (10.1),
From Eq. (10.2),
+
233
Moment-Distribution Method
From Eq. (10.1),
Distribution Factors:
From Eq. (10.12),
fixed end
⁄(
)
⁄(
)
fixed end
⁄(
⁄(
⁄(
)
)
)
hinged end
Moment Distribution:
The moment distribution process is carried out in Table
(10.5). The table, which is similar in form to those used
previously for the analysis of continuous beams, contains one
column for each member end of the frame. Note that the
columns for all member ends, which are connected to the
same joint, are grouped together, so that any unbalanced
233
Chapter Ten
moment at the joint can be conveniently distributed among
the members connected to it. Care must be taken when
carrying over moments from one end of the member to the
other. In this frame, no moment can be carried over from end
1 to end 3 of member (1-3) and from end 2 to end 4 of
member (2-4), because joints 1 and 2, which are at fixed
supports, will not be released during the moment distribution
process.
Table (10.5)
Joints
1
Members
13
31
34
43
45
D.Fs.
0
0.429
0.571
0.4
F.E.Ms.
-100
+100
-150
+150
3
4
2
5
42
24
54
0.3
0.3
0
1
-150
0
0
+150
Balance
joint 5
-150
C.O.Ms.
Modified
F.E.Ms.
-75
-100
D.Ms.
C.O.Ms.
+150
-225
0
+21.45
+28.55
+30
+22.5
+22.5
+15
+14.275
-8.565
-5.71
-2.855
-4.283
+1.630
+1.713
+0.857
+0.815
-0.489
-0.326
-0.163
-0.244
-116.0
+186.2
-6.435
-3.218
D.Ms.
C.O.Ms.
-150
+10.725
D.Ms.
C.O.Ms.
+100
+1.225
+0.613
D.Ms.
-0.368
C.O.Ms.
-0.184
Final End
Moments
-92.1
+115.9
0
0
+11.25
-4.283
-4.283
-2.142
+1.285
+1.285
+0.643
-0.244
-0.244
-0.122
-205.7
+19.3
+9.6
0
233
Moment-Distribution Method
The bending moment diagram is shown in Fig. (10.8-b)
Example 10.6: Draw the bending moment diagram for the
frame shown in Fig. (10.9) by using the moment-distribution
method.
36 kN
64.8 kN/m
2
1
(a)
2I
3
5m
I
4
5m
1.5 m
+202.5 kN.m
+
_
-162
-81
-54 _
_
(b)
-27 _
(+B.M. on compression side
-B.M. on tension side)
- -13.5
Figure (10.9)
Solution:
Fixed-End Moments:
233
Chapter Ten
From Table (9.1),
there is no load on member (2-4)
kN.m
kN.m
kN.m
Stiffness Factors:
From Eq. (10.1),
Distribution Factors:
From Eq. (10.12),
⁄(
)
⁄(
)
fixed end
fixed end
Using these data, the moment distribution is carried out in
Table (10.6). The bending moment diagram is shown in Fig.
(10.9-b).
233
Moment-Distribution Method
Table (10.6)
Joints
2
3
4
Members
21
24
23
32
42
D.Fs.
0
1/3
2/3
0
0
F.E.Ms.
+54
0
-135
+135
0
D.Ms.
0
+27
+54
+27
+13.5
+162
+13.5
C.O.Ms
Final End
Moments
+54
+27
-81
10.7 Analysis of Frames with Sidesway
Frames
that
are
nonsymmetrical
or
subjected
to
nonsymmetrical loading have a tendency to sidesway, or
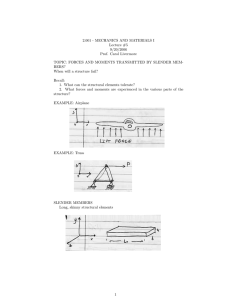
deflect horizontally. An example of one such case is shown
in Fig. (10.10-a). Here the applied load P will create unequal
moments at joints B and C such that the frame will deflect an
amount Δ to the right. Since the deformations are assumed to
be small, the joints B and C displace by the same amount, Δ,
as shown in Fig. (10.10-a).
The moment distribution analysis of such a frame, with
sidesway, is carried out in two parts. In the first part, the
sidesway of the frame is prevented by adding an imaginary
roller to the structure, as shown in Fig. (10.10-b). External
loads are then applied to this frame, and member end
moments are computed by applying the moment-distribution
233
Chapter Ten
process in the usual manner. With the member end moments
known, the restraining force (reaction) R that develops at the
imaginary support is evaluated by applying the equations of
equilibrium.
Δ
P
P
Δ
B
C
A
D
(a) Actual frame
M moments
R
R
B
C
B
C
A
D
A
D
(b) Frame with sideway (c) Frame subjected
prevented
to R
M0 moments
MR moments
δ
δ
Q
(d) Frame subjected to an arbitrary
translation δ (MQ moments)
Figure (10.10)
In the second part of the analysis, the frame is subjected
to the force R, which is applied in the opposite direction, as
shown in Fig. (10.10-c). The moments that develop at the
member ends are determined and superimposed on the
moments computed in the first part to obtain the member end
232
Moment-Distribution Method
moments in the actual frame. If M, M0, and MR denote,
respectively, the member end moments in the actual frame,
the frame with sidesway prevented, and the frame subjected
to R, then we can write
(10.13)
A question that arises in the second part of the analysis
is how to determine the member end moments MR that
develop when the frame undergoes sidesway under the action
of R. Since the moment-distribution method cannot be used
directly to compute the moments due to the known lateral
load R, we employ an indirect approach in which the frame is
subjected to an arbitrary known joint translation δ caused by
unknown load Q acting at the location and in the direction of
R, as shown in Fig. (10.10-d). From the known joint
translation, δ, we determine the relative translation between
the ends of each member, and we calculate the member
fixed-end moments. These moments are distributed by the
moment-distribution process to determine the member end
moments MQ caused by the yet unknown load Q. Once the
member end moments MQ have been determine, the
magnitude of Q can be evaluated by the application of
equilibrium equations.
With the load Q and the corresponding moments MQ
known, the desired moments MR due to the lateral load R can
234
Chapter Ten
now be determined easily by multiplying MQ by the ratio
, that is,
( )
(10.14)
By substituting Eq. (10.14) into Eq. (10.13), we can express
the member end moments in the actual frame as
( )
(10.15)
This method of analysis is illustrated by the following
example.
Example 10.7: Draw the bending moment diagram for the
frame shown in Fig. (10.11) by using the momentdistribution method.
constant.
Solution:
Fixed-End Moments:
From Table (9.1),
there is no load on member (1-2)
kN.m
kN.m
there is no load on member (3-4)
Stiffness Factors:
233
Moment-Distribution Method
40 kN
2
3
5m
(a)
7m
4
1
3m
4m
40 kN
R
2
3
(b)
4
1
M21=+24
kN.m 2
M34=-24
kN.m 3
(d)
(c)
5m
7m
M43=-12.2
kN.m 4
M12=+12.1
kN.m 1
Δ
R
2
3
R=2.08 kN
Δ
3
2
4
4
(e)
1
kN
(f)
kN
1
Figure (10.11)
233
Chapter Ten
M21=+34.5
kN.m 2
(g)
M12=+42.3
kN.m 1
Q
M34=+45.4
kN.m 3
(h)
7m
(i)
5m
M43=+71.7
kN.m 4
Figure (10.11) Continued
From Eq. (10.1),
Distribution Factors:
From Eq. (10.12),
fixed end
⁄(
)
⁄(
)
⁄(
)
⁄(
)
fixed end
Moment-Distribution Method
233
Moment-Distribution, Part I:
In this part of the analysis, the sidesway of the frame is
prevented by adding an imaginary roller at joint 2, as shown
in Fig. (10.11-b). The moment-distribution of the fixed-end
moments due to the applied external load 40 kN is then
performed, as shown in Table (10.7), to determine M0
member end moments.
To evaluate the restraining force R that develops at the
imaginary roller support, we first calculate the shears at the
lower ends of the columns (1-2) and (3-4) by considering the
equilibrium of the free bodies of the columns shown in Figs.
(10.11-c) and (10.11-d). Next, by considering the equilibrium
of the horizontal forces acting on the entire frame (Fig.
(10.11-e)), we determine the restraining force R. From Fig.
(10.11-c),
∑
+
kN
From Fig (10.11-d),
∑
+
kN
From Fig (10.11-e),
∑
+
kN
233
Chapter Ten
Table (10.7)
Joints
1
Members
12
21
23
32
34
43
D.Fs.
0
1/2
1/2
0.417
0.583
0
F.E.Ms.
0
0
-39.2
+29.4
0
0
+19.6
+19.6
-12.3
-17.1
-6.2
+9.8
+3.1
-4.1
-2.1
+1.6
+1.1
-0.7
-0.4
+0.6
+0.2
-0.3
-0.2
+0.1
-24.1
+24.1
D.Ms.
C.O.Ms
+3.1
+1.6
D.Ms.
C.O.Ms
+1.1
+0.6
D.Ms.
C.O.Ms
Final End
Moments
3
+9.8
D.Ms.
C.O.Ms
2
+0.2
+0.1
+12.1
+24
4
-8.6
-5.7
-2.9
-0.9
-0.5
-0.3
-0.2
-24
-12.2
Note that the restraining force acts to the right, indicating that
if the roller would not have been in place, the frame would
have swayed to the left.
Moment-Distribution, Part II:
Since the actual frame is not supported by a roller at joint 2,
the frame will be subjected to a lateral load
kN at
joint 2 in the opposite direction (that is, to the left), as shown
in Fig. (10.11-f). Here the joints 2 and 3 are temporarily
restrained from rotating, and as a result the fixed-end
moments at the ends of the columns are determined by the
Eq. (9.12) in Chapter 9, as
233
Moment-Distribution Method
Thus,
Here Δ is unknown and the method to conduct the analysis is
to assume a value for Δ or one of the fixed-end moments.
This assumed value will correspond to unknown load Q
instead of R.
Assuming,
kN.m, then
from which
kN.m
The positive sign is necessary since the moment must act
clockwise on the column for deflection Δ to the left. The
foregoing fixed-end moments are distributed by the usual
moment-distribution process, as shown in Table (10.8), to
determine the MQ moments caused by unknown load Q.
To evaluate the magnitude of Q, we first calculate the
shearing forces at the lower ends of the columns by
considering their equilibrium and then apply the equation of
233
Chapter Ten
equilibrium in the horizontal direction to the entire frame.
From Fig. (10.11-g),
Table (10.8)
Joints
1
Members
12
21
23
32
34
43
D.Fs.
0
1/2
1/2
0.417
0.583
0
F.E.Ms.
+50
+50
0
0
+98
+98
-25
-25
-40.9
-57.1
-20.5
-12.5
+10.3
+5.2
+2.6
+5.2
-1.3
-2.2
-1.1
-0.7
+0.6
+0.3
+0.2
+0.3
-0.1
-0.1
-0.05
-0.05
-34.4
-45.5
D.Ms.
C.O.Ms
-12.5
D.Ms.
C.O.Ms
+10.3
+5.2
D.Ms.
C.O.Ms
-1.3
-0.7
D.Ms.
C.O.Ms
+0.6
+0.3
D.Ms.
C.O.Ms
Final End
Moments
∑
2
-0.1
-0.05
+42.3
+34.5
+
kN
From Fig. (10.11-h),
∑
+
kN
From Fig. (10.11-i),
3
4
-28.6
+7.3
+3.7
-3
-1.5
+0.4
+0.2
-0.2
-0.1
+45.4
+71.7
233
Moment-Distribution Method
∑
+
kN
which indicates that the moments MQ in Table (10.8) are
caused by a lateral load
kN. Since the moments
are linearly proportional to the magnitude of the load, the
desired moments MR due to the lateral load
kN
must be equal to the moments MQ multiplied by the ratio
⁄
⁄
.
Actual Member End Moments:
The actual member end moments, M, can be determined by
Eq. (10.15). Thus
kN.m
kN.m
(
kN.m
(
kN.m
kN.m
kN.m
10.8 Analysis of Multistory Frames
The forgoing procedure can be extended to the analysis of
structures with several independent joint translations.
Consider the two-story frame shown in Fig. (10.12-a). This
233
Chapter Ten
P3
P3
Δ2
P1
P1
F
R2
E
E
P4
P4
Δ1
P2
R1
P2
D
C
C
A
δ1
F
C
D
B
(b) Frame with sidesway
prevented
M0 moments
(a) Actual frame
M moments
E
D
A
B
δ2
Q21
F
Q12
D
C
A
B
(c) Frame subjected to
known translation δ1
(MQ1 moments)
Q22
E
Q11
A
F
B
(d) Frame subjected to
known translation δ2
(MQ2 moments)
Figure (10.12)
structure has two independent joint translations, the sidesway
Δ1 of the first story and the displacements Δ2 of the second
story. The moment-distribution analysis of this frame is
carried out in three parts. In the first part, the sidesway of
232
Moment-Distribution Method
both floors of the frame is prevented by adding imaginary
rollers at the floor levels, as shown in Fig. (10.12-b).
Member end moments M0 that develop in this frame due to
the external loads are computed by the moment-distribution
process, and the restraining forces R1 and R2 at the imaginary
supports are evaluated by applying the equations of
equilibrium. In the second part of the analysis, the lower
floor of the frame is allowed to displace by a known amount
δ1 while the sidesway of the upper floor is prevented, as
shown in Fig. (10.12-c). The fixed-end moments caused by
this displacement are computed and distributed to obtain the
member end moments MQ1. With the member end moments
known, the forces Q11 and Q12 at the locations of the roller
supports are determined from the equilibrium equations.
Similarly, in the third part of the analysis, the upper floor of
the frame is allowed to displace by a known amount δ2, as
shown in Fig. (10.12-d), and the corresponding member end
moments MQ2, and the forces Q12 and Q22, are evaluated. The
member end moments M in the actual frame are determined
by superposition of the moments computed in the three parts
as
(10.16)
In which c1 and c2 are the constants whose values are
obtained by solving the equations of superposition of
horizontal forces at the locations of the imaginary supports.
234
Chapter Ten
By superimposing the horizontal forces shown in Figs.
(10.12-a) to (10.12-d) at joints D and F, respectively, we
obtain
By solving these equations simultaneously, we obtain the
values of the constants c1 and c2, which are then used in Eq.
(10.16) to determine the desired member end moments, M.
The analysis of multistory frames by the momentdistribution method is quite tedious and time consuming.
Therefore, the analysis of such structures is performed on
computers using the matrix formulation of the displacement
method.
Problems
10.1 through 10.4: Determine the reactions and draw the
shearing force and bending moment diagrams for the beams
shown in Figs. P9.1 to P9.4 by using the moment-distribution
method.
10.5 through 10.7: Determine the member end moments for
the frames shown in Figs. P9.6, P9.7, P9.9, and P9.10 by
using the moment-distribution method.