European Journal of Operational Research 197 (2009) 999–1011
Contents lists available at ScienceDirect
European Journal of Operational Research
journal homepage: www.elsevier.com/locate/ejor
A contribution to the linear programming approach to joint cost allocation:
Methodology and application q
Alireza Tehrani Nejad Moghaddam a,*, Christian Michelot b
a
b
IFP, Institut Francßais du Pétrole, 1 and 4 avenue Bois-Préau, 92852 Rueil-Malmaison, France
Institut de Mathématiques de Bourgogne & Laboratoire d’Economie et de Gestion, Université de Bourgogne, BP 47870, 21078 Dijon, France
a r t i c l e
i n f o
Article history:
Received 9 November 2006
Accepted 11 December 2007
Available online 13 March 2008
Keywords:
Linear programming
Joint cost allocation
Additivity
Dual variables
Simplex method
a b s t r a c t
The linear programming (LP) approach has been commonly proposed for joint cost allocation purposes.
Within a LP framework, the allocation rules are based on a marginal analysis. Unfortunately, the additivity property which is required to completely allocate joint costs fails in presence of capacity, institutional
or environmental constraints.
In this paper, we first illustrate that the non allocated part can be interpreted as a type of producer’s surplus. Then, by using the information contained in the Simplex tableau we propose an original two-stage
methodology based on the marginal costs and the production elasticity of input factors to achieve an
additive cost allocation pattern. The distinguished feature of our approach is that it requires no more
information or iterative computations than what is provided by the final Simplex tableau. A real-type
refinery case study is provided.
Ó 2008 Elsevier B.V. All rights reserved.
1. Introduction
A characteristic of most industries is the prevalence of production processes which usually lead to joint production costs. According to
Manes and Cheng (1988), joint costs1 arise ‘‘when the production of one product simultaneously and necessarily involves the production of
one or more other products”, for example the transformation of crude oils into petroleum oil products in a refinery. Few topics in accounting
are as thoroughly condemned in theory, and as pervasively manifest in practice as joint cost allocation (Verrecchia, 1982).
Despite this complexity, costing joint products appears to have remained in use in both public and private sectors for valuing inventories,
income determination, financial and tax reporting and setting selling prices. Moreover, Gatti and Grinnell (2000) place special emphasis on the
purpose of measuring and promoting productivity and quality improvements of joint cost allocations. Further motives for cost assignments
can be found in Thomas (1969, 1974), Zimmerman (1979) and Biddle and Steinberg (1984), and references therein, for an extensive survey.
In practice, two broad methods to allocate joint costs have been used by accountants: physical measures (weights, volumes, lengths,
heat contents, etc.) and relative sales value or net realizable value (NRV) of products. Although the majority of accountants favor some form
of NRV (Cheng and Manes, 1992), the physical measures method seems to be most commonly used in companies (e.g., Kaplan and Atkinson, 1989). However, Gatti and Grinnell (2000) argue that selecting the appropriate approach between physical measures and any form of
NRV is a critical step and should be based on cause-and-effect criteria.
These methods suffer from three well-known potential weakness. First, there is the underlying assumption that the costs incurred vary
in direct proportion to variation in the physical attributes or product market values. Second, all economists confirm that these methods are
in some ways completely arbitrary and consequently of little use for decision making purposes (e.g., Drury, 2000). This issue is important
because different methods of cost allocation can have profoundly different economic consequences on the firm’s policies (cost recoveries,
cost justification, inventory valuation, pricing, etc.); and the allocated joint costs, if incorrect or unfair, may also lead to actions that decrease the total profit of the firm. For instance, Lemaire (1984) reports that a large Belgian insurance company uses more than 11 different
criteria, essentially based on physical measures, to allocate its joint costs and whenever it is felt that one of the criteria acts unfairly, the
q An earlier version of this study was presented at the 19th Mini EURO Conference on Operational Research Models and Methods in the Energy Sector, September 2006 (for
identification purpose only).
* Corresponding author. Tel.: +33 1 41 35 56 71; fax: +33 1 41 35 68 30.
E-mail addresses: alireza.tehraninejad@gmail.com (A. Tehrani Nejad Moghaddam), michelot@u-bourgogne.fr (C. Michelot).
1
Joint cost should be distinguished from common costs which are incurred when products are produced with the same or part of the same facilities, but need not necessarily
be produced together. In this paper, we only consider the problem of allocating joint costs.
0377-2217/$ - see front matter Ó 2008 Elsevier B.V. All rights reserved.
doi:10.1016/j.ejor.2007.12.043
1000
A. Tehrani Nejad Moghaddam, C. Michelot / European Journal of Operational Research 197 (2009) 999–1011
company uses other arbitrary physical measures. Third, these traditional methods provide an incomplete picture of the whole industrial
system as they ignore the complex interactions and interdependencies which exist among input factors and final outputs.
As alternatives to traditional accounting allocation bases, there has been a growing interest in cost allocation schemes predicated on
notions in game theory and mathematical programming. These approaches are more accurate and minimize the cost of errors.
The equitable assignment of joint costs to the joint products is a central theme of the theory of cooperative games. Almost forty five
years ago, Shubik (1962) proposed using the Shapley value of a cooperative game as an incentive mechanism to allocate accounting costs.
He argues that the axioms underlying Shapley value coincide with the properties the incentive mechanism requires for cost allocation
problems. Since then, considerable literature has been developed around this method, see Moulin (2001) for an extensive survey. Beside
the need for efficient algorithms for computing the Shapley value, many accountants point out that game theory-based allocations should
be applied to common costs rather than joint cost settings (see, e.g., Biddle and Steinberg, 1984; Manes and Cheng, 1988). These authors
argue that the result of game theoric calculations are not true allocations of cost but rather the distributions, based on conventions or
agreements on how costs will be shared by members of a team venture once the strategy of the coalition has been approved by the coalition. The appropriateness of the game theory approach to joint cost allocation issues is beyond the scope of this paper.
In parallel, the search for cost allocation methods using the mathematical programming grew rapidly in the accounting literature. In
1965, Manes and Smith were probably the first to show that the joint cost production process was amenable to Kuhn–Tucker analysis.
In 1971, Hartley demonstrated for the benefit of cost accountants how joint product decisions could be resolved by linear programming.
Since these first efforts, many others have significantly contributed to this literature; see for instance, Kaplan and Thompson (1971), Jensen
(1974), Kaplan and Welam (1974), Baker and Taylor (1979), Itami and Kaplan (1980), Williams (1981, 2002), and Cheng and Manes (1992).
It is well known that in a LP formulation, under certain assumptions, some optimal dual variables can provide a non-arbitrary additive allocation schema. Through the duality process, the LP model depicts the real causality between various inputs and outputs simultaneously
and allocates the total variable cost accordingly without having to use any arbitrary rules. Furthermore, Balachandran and Ramakrishhnan
(1996) prove that cost allocations based on dual optimal solutions are also stable. Unfortunately, the additivity condition which is required
for an allocation dose not hold in general. In the short-run, plant capacity, raw material availability or any calibrating or institutional constraints might destroy the additivity property of LP-based allocations. This handicap is a valid objection to LP as a cost allocation tool and
severely limits its use for problems in which the ultimate objective is to assign unambiguously the total variable cost into mutually exclusive subsets.
This paper is aimed to provide an original two-stage procedure, based on LP, to fully allocate the total variable cost of a joint production
firm on its joint products. We show that how an additive cost allocation could be easily derived by correctly exploiting the information
obtained from the optimal simplex tableau. Contrary to the other allocation methods (e.g., Ramsey–Boiteux pricing or games theory approach), our two stage procedure needs no more information or iterative computations than what is provided by the optimal solution.
The paper is organized as follows. Section 2 reviews the application of linear programming in joint cost allocation problems. Section 3
delineates our suggested methodology for the case with input requirement availability or plant capacity constraints. A step by step numerical example is provided to illustrate the procedure. In Section 4, we apply the proposed allocation method to a real-type refinery LP model
and discuss the results. Finally, Section 5 concludes.
2. Linear programming and the joint cost allocation problem
2.1. Model description
In this paper, we develop a static LP model to study the joint cost allocation problem in variable proportions, for price-taking firms operating in a cost-minimizing environment. In fact, the cost function is one of the principle tools for the analysis of choices made by managers and
is implied by the profit-maximization objective. By definition, the arguments of a cost function are the given levels of output and the input
prices. We assume that a multi-product firm’s objective is to satisfy its production target, denoted by the m-vector b, at minimum cost subject
to the prevailing technology, commodity prices and (fixed) input availabilities. The cost vector c is the given n-vector of acquisition or accounting input cost and includes all costs that are absorbed in a direct costing system. Suppose that the technology for transforming limiting inputs
into product outputs is linear and represented by a fixed coefficient matrix A of dimensions m n. We assume that the firm is operating in a
deterministic environment and uses n divisible input activities, represented by a n 1 non negative vector x. The technical coefficients akj related to the jth activity are contained in the jth column Aj of A. In short-run models the availability of some input factors is usually limited, but
here, for notational simplicity and without loss of generality, the availability of all input factors x is supposed to be limited to x.
Beside the product demand and capacity constraints, the most common types of other constraints are the material balance and product
quality constraints. Mathematically, both of these constraints can be formulated as Zx ¼ 0. Since the right-hand-side (RHS) of these constraints are zero, they do not affect the additivity property of LP-based allocations. Therefore, without loss of generality, we omit them from
our basic model. Given these preliminaries, we may now state the one-period LP model of the firm as
8
T
>
< min c x
ð1Þ
s:t:
Ax P b;
>
:
:
06x6x
At the optimum, the objective value Cðc; bÞ expresses the minimum variable input cost that must be borne for producing the output level b at
the given technology A and acquisition input costs c. The technical properties of the objective value is that Cðc; bÞ is piecewise linear, nondecreasing, concave (and thus continuous) in c for fixed output level b. Similarly, Cðc; bÞ is piecewise linear, nondecreasing, convex and continuous on its domain in b for fixed input variable cost c. The dual specification of (1) is
8
T
T
>
x
< max b y k T
ð2Þ
s:t:
A y 6 c þ k;
>
:
y P 0; k P 0:
A. Tehrani Nejad Moghaddam, C. Michelot / European Journal of Operational Research 197 (2009) 999–1011
1001
Throughout the paper, we assume that both problems (1) and (2) have at least a feasible solution and are not degenerate. These assumptions
ensure existence and uniqueness of primal optimal solution x and of dual optimal solution ðy ; k Þ.2 Note that, the primal feasibility means
that the output demand levels b correspond to the short-run production capacity of the firm. Moreover, if the input prices cj are positive (i.e.,
c P 0), then we are guaranteed a feasible solution for dual problem. We denote by M and S the sets of active demand constraints and scarce
input factors at x , and we set s ¼ jSj. We will assume that M ¼ f1; 2; . . . ; mg, i.e., Ax ¼ b. In words, the optimal combination of inputs are such
that all final product demands are satisfied without any excess of production. This assumption is justified within a static LP model in which no
inventory or exportation variable is defined. Finally, we denote B the ðk kÞ basic matrix and b the set of basic index.
The optimal dual variables y associated with the product demand constraints can be interpreted as their marginal production cost: they
measure the variation of the cost function whenever the demand for one product is increased by one unit, ceteris paribus. Similarly, the
optimal dual variables k associated with the input factor availability constraints can be interpreted as their economic rents or opportunity
costs: they measure the variation of the cost function whenever the availability of one capacity constraint is increased by one unit, ceteris
paribus.
2.2. LP-based cost allocation methodology
Thomas (1969, 1974), points out that any theoretically justified or non-arbitrary cost allocation method should be additive, unambiguous
and defensible. The additivity property requires that total cost be equal to the sum of the parts, ‘‘meaning that all of the cost is allocated, no
more no less”. The unambiguity condition requires the uniqueness of the allocated parts, and the defensibility criterion, which is the most
important one, needs to provide conclusive proof for choosing a particular allocation method among all possible alternatives.
This section attempts to illustrate that the cost allocations resulting from ex ante cost minimizing behavior are defensible due to their
economic meanings but unfortunately not additive in general. Following the well-known duality theory of linear programming,3
T
cT x þ kT x ¼ b y :
ð3Þ
T
The right-hand side of relation (3) represents the revenue side of the price taker firm, with b y as the total revenue if every unit of the products are sold at their marginal costs y . The left-hand side of (3) represents the total relevant input cost, with cT x as the total variable input
cost and kT x ¼ kT x as the economic rents associated with the (fixed) scarce inputs. The equality between the objective functions at the
optimum distributes all the revenue among the input factors according to their value marginal productivities ðc þ k Þ and leaves a zero level
of economic profit for the firm.4 Put it differently, within a LP framework, the competition assumption ensures that inputs receive their value
of marginal products and linear homogeneity ensures that the resulting distributive shares sum to the total revenue. In most accounting systems, however, less emphasis is placed on revenue allocations (Biddle and Steinberg, 1984): ‘‘revenue is taken as being appropriately allocated
to the period in which it falls, and accordingly, it is costs which will be manipulated” (Eckel, 1976).
On the other hand, relation (3) shows that if marginal production costs y are used for valuing the final products, the imputed cost of
T
these goods b y will exceed the total variable input costs cT x by kT x even before any overhead is allocated. Graphically (see the left-hand
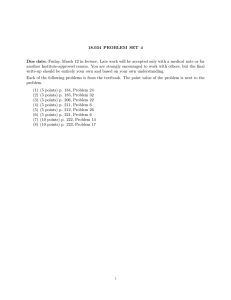
side picture in Fig. 1), this difference corresponds to the area above the short-run marginal cost curve and below the market price line y .5
By definition, this area corresponds to the amount that the producer benefits by selling every unit of his products at their marginal costs that is
higher than what he would be willing to sell them for; and, it represents the total (quasi) economic rents of the competitive entrepreneur.
Furthermore, since in the LP framework the input markets are supposed to be perfectly competitive, these economic rents ends up as the producer surplus6 which are attributed, ultimately, to the scarce inputs xj ðj 2 SÞ (Mishan, 1968). Thus, from an accounting point of view marginal
costs can give a somewhat distorted picture of the underlying profitability of the firm and overstate the average cost of producing a given
quantity of output (Itami and Kaplan, 1980). This handicap is a valid objection to LP as a cost allocation tool and limits its use for problems
in which the objective is to assign non-arbitrarily the total variable cost into mutually exclusive subsets.
As has been indicated elsewhere (e.g., Mishan, 1968), the longer the period considered the smaller the producer surplus kT x. In a longrun equilibrium where no capacity constraints exit, there is no surplus left over for the firm and all added value is distributed among the
factors of production. Put differently, in a long-run framework, at each point on the horizontal competitive supply curve nothing is left as a
surplus to any input factor of production; and, the long-run marginal costs yL fulfill the three desired properties (i.e., additivity, unambiguity and defensibility) of an allocation rule at the same time (see the right-hand side picture in Fig. 1).
In the rest of this paper, we develop a two-stage procedure to fully reallocate the total producer surplus kT x to final products in order to
achieve additive LP-based cost allocations in general. We will show that an optimal reallocation pattern is possible via the production elasticity of input factors. Our ultimate goal is to find out the m-vector Y in such a way that
T
cT x ¼ b Y :
ð4Þ
2.3. Literature review
Before introducing our procedure, we briefly review the existing propositions to this issue in the LP literature.
2
The non degeneracy of the primal and dual problems is the only limiting assumption for our procedure in general. The joint cost allocation in a degenerate LP problem is
presently under investigations by the authors.
3
This fundamental result is true in general when both the objective function and constraints are positively homogeneous of the same degree (Greenberg, 1973).
4
Even though in the short-run positive (or negative) profits are admissible for a competitive entrepreneur, LP models which generally represent a short-run specification given
the presence of limiting (fixed) inputs, leave a zero level of economic profit to the firm. This issue of short-run versus long-run behavior of the competitive firm is not still resolved
by a linear programming model (Paris, 2006).
5
The non linearity in the short-run marginal costs arises from the capacity constraints on activity levels.
6
Note that, whenever one or more inputs are in a monopsony framework, economic rents exceed producer surplus (Frasco and Jung, 2001).
1002
A. Tehrani Nejad Moghaddam, C. Michelot / European Journal of Operational Research 197 (2009) 999–1011
Fig. 1. Short and long-run cost minimizing equilibrium.
2.3.1. Ramsey–Boiteux pricing method
From the economic literature, Ramsey–Boiteux pricing (RBP) method, used for public utility regulation and optimal taxation, may seem
to be a plausible way out of this dilemma (Babusiaux and Pierru, 2007). Let us recall that the basic idea behind RBP is to derive Y in (4) in
such a way that all final products be varied by the same proportion from the quantities that would be produced at prices equal to their
corresponding marginal costs. The complete RBP formula requires that (Damus, 1984),
Y i yi
j X Y p yp
¼ þ
Yi
Y p
ii p–i
!
bp pi
bi ii
8i 2 M;
ð5Þ
where ðY i ; Y p Þ; ðyi ; yp Þ and ðbi ; bp Þ are the ith and pth elements of Y ; y and b, respectively. The coefficient ii is the direct elasticity of ith final
product and pi is the cross elasticity of pth final product with respect to ith final product. In general, ii is supposed to be negative, but pi can
T
be negative, zero or positive. The adjusting coefficient j 2 ð0; 1Þ should be determined in such a way that cT x ¼ b Y . This method results in
the least welfare-damaging deviations from marginal cost prices that permit the supplier to just cover his input cost and is referred to the
second best pricing7 (Baumol and Bradford, 1970).
In our context, the use of RBP as a surplus reallocation method is open to discussion on several points. First, in most of the RBP applications, the substitution effects among output products are supposed to be zero (i.e., pi ¼ 0), which would be, we believe, a rather strong
assumption for multi-output/multi-input firms. For instance, as it is observed in the European oil products market, the higher pricing and
taxing of gasoline has been a key determinant in dieselization trends of the light vehicle fleets and in the development of diesel vehicle
technology in European countries. Therefore, the introduction of these substitution effects should not be regarded as ‘‘unnecessary complexity” but rather as informative signals from the consumers’ behavior pattern.
Second, as part of the equation (5), the application of RBP involves numerical estimates of consumer demand for final products (direct ii
and cross pi elasticities). Fiertz and Monico (2004) illustrate the sensitivity of RBP-based allocations to potential errors in the selection of
elasticity values. Moreover, the unambiguity property is also violated when different elasticities exist for the same product (see e.g., Dahl
and Sterner, 1991).
Third, Young (1985) shows that the principal flaw in proportionally adjusted marginal cost pricing or RBP in general, is that they do not
create the right incentives for producers because they are not monotonic with changes in the cost function. In other words, they illustrate
that these methods might attach a penalty to diligence by attributing a higher unit cost to products whose marginal cost of production
uniformly decreases, and on the other hand, reward the negligence.
x as a single lot based on the products’ market structure (i.e., elasticities). In
Forth, RBP implicitly reallocate the total producer surplus kT fact, by so doing we ignore the different contribution of final products to the economic rent associated with each scarce input. At the operating state of the multi product firm, final outputs may require different amount of scarce inputs and should contribute differently to their
x and product outputs is based on
economic rents. As a consequence we believe that, the real connection between total producer surplus kT technical relations embodied in the firm structure and is completely independent from the products’ market structure. Moreover, reallocating the producer surplus to final products based on their respective price elasticises fall again in the realm of choosing arbitrarily a market value indicator in advance.
2.3.2. Itami and Kaplan’s method
From the accounting literature, Itami and Kaplan (1980), introduce a simple general approach to average product costing in a interactive
multiproduct firm. They argue that ‘‘since physical identification of total variable costs with products on a product-by-product basis is
impossible. . .(therefore) it is natural to try to base costing or valuation of products on some values related to these products”. They propose
using the exogenous m-vector of constant selling prices q instead of the products’ marginal revenue in RBP. The vector Y is then computed
from a convex combination of constant selling prices q and marginal costs of final products y
Y ¼ ay þ ð1 aÞq:
ð6Þ
Itami and Kaplan propose three average product costing by setting a ¼ 0 (marginal revenue costing), a ¼ 1 (marginal cost costing) and
T
T
T
a 2 ð0; 1Þ (equivalent profitability costing) in such a way that cT x ¼ b Y . As a condition for their procedure, b q–b y . Since this procedure
is a simplified application of RBP, the two last critics to this latter is also valid for Itami and Kaplan’s approach.
7
If all direct elasticities ii are equal and pi ¼ 0, then RBP results in a more simple solution known as the proportionally adjusted marginal cost pricing.
A. Tehrani Nejad Moghaddam, C. Michelot / European Journal of Operational Research 197 (2009) 999–1011
1003
2.3.3. Manes and Cheng’s proposition
In a profit maximization framework for joint products produced in fixed proportions using one single input, Manes and Cheng (1988, p.
35) show that kj is added, in a predictable way, to final products that would have been produced if the availability of jth scarce input had
increased by one unite. Ranking the demand constraints, in order of size, from most intensive in the scarce resource to less intensive one,
and using implicitly the Rybczynski (1955) theorem in economics,8 they propose a procedure to disengage kj from the joint cost allocations.
Their procedure, however, is not applicable in a cost minimizing framework, because the optimization always keeps the output products constant by adjusting the input requirement set. Moreover, their method does not seem to be easily expendable for costing joint products in variable proportions using multiple input factors.
3. Reallocating the opportunity cost of scarce inputs to joint products
In this section, we develop a two-stage procedure to derive a reallocation pattern for each kj in such a way that it reflects the behavior of
the multi product firm in its most realistic manner. The procedure is based on the marginal substitution coefficients provided by the simplex tableau which are associated with the optimal solution of the LP model. These optimal coefficients provide a powerful tool to identify
the correct type of causality for reallocation problems. To the best of our knowledge, these optimal coefficients have never been used in any
joint cost allocation scheme.
3.1. First step
For some technical reasons that will be discussed later, we begin the first step of our two-step methodology by introducing an artificial
constraint into model (1) which can be readily interpreted as a material balance constraint for the process loss. In fact, this constraint might
already exist in most industrial models to capture the quantity of total loss. In cost accounting systems, this is referred to as normal process
loss and is usually expressed as a percentage of the input activity volume.
The new LP model takes on the following specifications:
8
min cT x
>
>
>
>
>
Ax P b;
>
< s:t:
T
ð7Þ
l x ‘ ¼ 0;
>
>
>
>
x
6
x
;
>
>
:
x P 0; ‘ P 0;
T
where the n-vector l ¼ ½l1 ; l2 ; . . . ; ln contains the loss coefficients for each input activity, and the variable ‘ measures the total loss inherent in
the production process. We also assume that there is no abnormal loss so that eT Aj þ lj ¼ 1 for all input activities, where eT ¼ ½1; 1; . . . ; 1. The
dual of (7) is
8
T
T
>
x
< max b y k ð8Þ
s:t:
AT y 6 c þ k ll;
>
:
y P 0; k P 0; l P 0;
where l is the shadow price associated with the material balance constraint for process loss. Note the positivity condition imposed on the
Lagrange multiplier l associated with an equality constraint. This is unusual but, here, can be directly derived from the KKT optimality conditions. It results from the fact that no cost coefficient is associated with the loss variable ‘ in the objective function.
Before proceeding further, we provide a numerical example to illustrate the procedure. Let us consider a very simple oil refinery optimization model9 in which the refiner processes five different type of crude oils ðx1 ; x2 ; . . . ; x5 Þ to produce three main type of oil products: gasoline, diesel and fuel oil. Over a typical year, the refiner’s objective is to satisfy its output target (100, 87, 72 tons) at minimum cost subject to
the market crude prices (respectively, $55, $50, $72, $85 and $60 per ton) and its prevailing technology. In the short-run, the availability of the
crudes x1 ; x2 and x5 is limited to 45, 15 and 52 tons. We also assume that the quantity of loss associated with processing each ton of the crude
oils are respectively 0.03, 0.04, 0.01, 0.02 and 0.03 tons. The cost minimization LP model of this refinery can be formulated as
8
min 55x1 þ 50x2 þ 72x3 þ 85x4 þ 60x5
>
>
>
>
s:t:
>
>
>
>
>
>
0:29x1 þ 0:19x2 þ 0:39x3 þ 0:35x4 þ 0:49x5 P 100 ðgasolineÞ;
>
>
>
<
ðdieselÞ;
0:34x1 þ 0:29x2 þ 0:35x3 þ 0:29x4 þ 0:29x5 P 87
>
ðfuel oilÞ;
0:34x
1 þ 0:48x2 þ 0:25x3 þ 0:34x4 þ 0:19x5 P 72
>
>
>
>
>
þ
0:04x
þ
0:01x
þ
0:02x
þ
0:03x
‘
¼
0
ðmaterial balance for lossesÞ;
0:03x
1
2
3
4
5
>
>
>
>
>
6
45;
x
6
15;
x
6
52
ðcrudes availabilityÞ;
x
>
1
2
5
>
:
xj P 0; j ¼ 1; . . . ; 5; ‘ P 0:
At the optimum, all crude oils are processed, the marginal production cost of the oil products and the shadow prices of crude oils are respectively yT ¼ ½$21:212; $48:888; $186:464 and kT ¼ ½$31:171; $57:711; $0:000 and the total variable input cost amounts to $17531.61. Lastly,
T
the refinery’s process loss equals to 5.19. It can be easily verified that total output value b y exceeds total input cost cT x by $2268.36.
Mathematically, kj evaluated at input accounting costs is stated as (Paris, 1991, p. 208):
8
Rybczynski theorem says, given that outputs use the same inputs, when one input is increased, the level of output associated with the activity that uses that resource more
intensively will increase while the other activity level will decrease.
9
In Section 4, we apply the procedure to a real-type refinery example.
1004
A. Tehrani Nejad Moghaddam, C. Michelot / European Journal of Operational Research 197 (2009) 999–1011
kj ¼ cTB B1 ej ;
ð9Þ
where ej is the jth unit vector (ejt ¼ 0 for t–j and ejj ¼ 1). The vector cB contains the accounting cost coefficients in the objective function as
they appear in the column of the basic index b, and B1 ej represents the column of the optimal basis inverse matrix B1 associated with the
slack variable of the jth scarce input. For notational convenience let sj ¼ B1 ej .
In economic terms, sj represents the vector of marginal rates of technical substitution (MRTS) between the jth scarce input and all the
input activities involved in the production plan. More precisely, the vector sj shows the rate at which basic inputs should be substituted
along a given isoquant, whenever an extra unit of jth scarce input were made available at the optimum. The activity analysis isoquants are
piecewise hyperplanes and consequently the MRTS between input activities are not defined at the junction of them. The non degeneracy
assumption guaranties the stability of the optimal basis B under small perturbations so that the vector sj is uniquely determined.
In Table 1, a part of the final simplex tableau of the refining example is illustrated. The column to the immediate left of the tableau indicates the basic activities whose optimal values are read in the most right column. The first row corresponds to the slack variables associated
with the model constraints; and, the last row represents the dual optimal variables. The optimal value of the cost (objective) function is
located in the southeast corner of the final tableau.
The vectors of MRTS for crudes 1 and 2 are read as the column of the final tableau corresponding to slackðx1 Þ and slackðx2 Þ
sx1 ¼ ½0:649; 0:961; 0:000; 0:026; 0:637; 0:637; 1:000T ;
sx2 ¼ ½1:911; 0:161; 1:000; 0:033; 1:105; 1:105; 0:000T :
These vectors indicate respectively how the additional unit of scarce crudes 1 and 2 should be best used, while maintaining oil product levels
constant. In this example, an additional unit of scarce crude 1 would alter the optimal input requirement set (not the optimal technology) by
decreasing refining of crudes 3 and 4 by 0.961 and 0.649 of a unit, and increasing the use of crude 5 by 0.637 of a unit. This substitution
process will lead to $31.171 saving and is the most efficient use of the extra unit of scarce crude 1.
Now the relevant question is how this implicit saving (or economic rent) should be reallocated to joint oil products? The same interpretation applies to sx2 and k2 . Before answering to this key question, let us first recall that sj is obtained from the product of the original
technical coefficients of jth input activity ATj and the inverse of the optimal basis matrix. Hence, an explicit technical relation should connect each kj to final products. To show this physical interaction, we decompose the optimal contribution of final products to kj ’s from their
adjustments along the constant isoquants by setting up the total differential of the production functions at the optimum Ax ¼ b,
X dxk ¼ 0; i 2 M:
ð10Þ
aik
dxj
k2b
Relation (10) says that along an isoquant ðdbi ¼ 0Þ, the gain in outputs from increasing by one marginal unite ðdxj ¼ 1Þ the availability of jth
scarce input is exactly compensated by the variation in outputs from substituting other basic inputs. The value of these trade-offs ðdxk Þ depends on the optimal technology (the optimal basis) and are directly obtainable from the final simplex tableau. With respect to the technical
coefficients in matrix A, the vector l and the MRTS vectors sx1 and sx2 , the adjustment of oil products and total loss to an additional unit of
scarce crudes 1 and 2 is summarized in Tables 2 and 3.
Now, to fully reveal the underlying connection between the economic rent of jth scarce input and final products, we introduce the optimal adjustment of final outputs (products and loss) into relation (9) as follows:
!
X
X
ck
aik þ lk sjk ;
ð11Þ
kj ¼
k2b
i2M
Table 1
Part of the optimal simplex tableau of the refining example
#
Basic variables
Slack gasoline
Slack diesel
Slack fuel oil
Slack losses
Slack ðx1 Þ
Slack ðx2 Þ
Slack ðx5 Þ
Optimal value
x4
x3
x2
‘
x5
Slackðx5 Þ
x1
C
0.757
5.492
0.000
0.136
5.871
5.871
0.000
21.212
6.111
12.638
0.000
0.166
5.694
5.694
0.000
48.888
7.373
5.126
0.000
0.060
1.186
1.186
0.000
186.464
0.000
0.000
0.000
1.000
0.000
0.000
0.000
0.000
0.649
0.961
0.000
0.026
0.637
0.637
1.000
31.171
1.911
0.161
1.000
0.033
1.105
1.105
0.000
57.711
0.000
0.000
0.000
0.000
1.000
0.000
0.000
0.000
17.13
135.56
15.00
5.19
51.49
0.50
45.00
17531.61
Table 2
Adjustment of oil products and process loss to an extra unit of scarce crude 1
MRTS
Increase
Crude 1
Crude 5
1.000
0.637
Decrease
Crude 3
Crude 4
0.961
0.649
Net effect
0.000
Gasoline
Diesel
Fuel oil
Loss
1.000 0.29
0.637 0.49
1.000 0.34
0.637 0.29
1.000 0.34
0.637 0.19
1.000 0.03
0.637 0.03
0.961 0.39
0.649 0.35
0.961 0.35
0.649 0.29
0.961 0.25
0.649 0.34
0.961 0.01
0.649 0.02
0.000
0.000
0.026
1005
A. Tehrani Nejad Moghaddam, C. Michelot / European Journal of Operational Research 197 (2009) 999–1011
Table 3
Adjustment of oil products and process loss to an extra unit of scarce crude 2
MRTS
Increase
Crude 2
Crude 5
1.000
1.105
Decrease
Crude 3
Crude 4
0.161
1.911
Net effect
where by construction,
and C‘ :
P
i2M aik
Ci ¼ Diagðaik ; k 2 bÞ;
Gasoline
Diesel
Fuel oil
Loss
1.000 0.19
1.105 0.49
1.000 0.29
1.105 0.29
1.000 0.48
1.105 0.19
1.000 0.04
1.105 0.03
0.161 0.39
1.911 0.35
0.161 0.35
1.911 0.29
0.161 0.25
1.911 0.34
0.161 0.01
1.911 0.02
0.000
0.000
0.000
0.033
þ lk ¼ 1. To separate the part of each output ði 2 MÞ in kj we define the following ðk kÞ allocating matrix Ci
C‘ ¼ Diagðlk ; k 2 bÞ;
ð12Þ
where the technical coefficients aik represent the average productivity of input factors in the same order as they appear in the ith ði 2 MÞ row
of B. Similarly, lk correspond to the loss coefficients associated with loss row in B.
In our numerical example, the basic index is b ¼ fx4 ; x3 ; x2 ; ‘; x5 ; slackðx5 Þ; x1 g and the optimal basis matrix B is given by
0:35 0:39 0:19 0:00 0:49 0:00 0:29 Gasoline;
Diesel;
0:29 0:35 0:29 0:00 0:29 0:00 0:34 0:34 0:25 0:48 0:00 0:19 0:00 0:34 Fuel oil;
B ¼ 0:02 0:01 0:04 1:0 0:03 0:00 0:03 Loss;
0:00 0:00 0:00 0:00 0:00 0:00 1:00 Crude 1;
0:00 0:00 1:00 0:00 0:00 0:00 0:00 Crude 2;
0:00 0:00 0:00 0:00 1:00 1:00 0:00 Crude 3:
The allocating diagonal matrix for oil products and process losses are calculated as
Cgasoline ¼ Diag½0:35; 0:39; 0:19; 0:00; 0:49; 0:00; 0:29;
Cdiesel ¼ Diag½0:29; 0:35; 0:29; 0:00; 0:29; 0:00; 0:34;
Cfuel oil ¼ Diag½0:34; 0:25; 0:48; 0:00; 0:19; 0:00; 0:34;
C‘ ¼ Diag½0:02; 0:01; 0:04; 1:0; 0:03; 0:00; 0:03:
Using definitions (12), relation (9) can be rewritten as
!
X
kj ¼ cTB
Ci þ C‘ sj ;
ð13Þ
i2M
where by construction,
as follows:
part of products
kj
P
i2M Ci
þ C‘ ¼ Diagð1; 1; . . . ; 1Þ. Rearranging (13), we separate the part of output products from the process loss in kj
part of loss
zfflfflfflfflfflfflfflffl
zfflffl}|fflffl{
X ffl}|fflfflfflfflfflfflfflfflffl{
T
T
¼
c
C
s
þ
c
i
j
B
B C‘ sj :
i2M
ð14Þ
kj
Relation (14) relates each to the firm’s outputs (including the process loss) through a realistic technical relationship which emerges from
the equilibrium behavior of the firm, that is the MRTS vectors sj at the optimum.
As illustration, we calculate the part of refining products and the total process loss in the opportunity cost of crudes 1 and 2:
k1 ¼ cTB ðCgasoline Þsx1 þ cTB ðCdiesel Þsx1 þ cTB ðCfuel oil Þsx1 þ cTB ðC‘ Þsx1 ;
which yields
k1 ¼ 11:6288
|fflfflfflfflffl{zfflfflfflfflffl} 10:4438
|fflfflfflfflffl{zfflfflfflfflffl} 10:1013
|fflfflfflfflffl{zfflfflfflfflffl} þ 1:001
|fflffl{zfflffl} ¼ $31:17:
gasoline
diesel
The same is applied to the
fuel oil
process loss
k2 :
k2 ¼ cTB ðCgasoline Þsx2 þ cTB ðCdiesel Þsx2 þ cTB ðCfuel oil Þsx2 þ cTB ðC‘ Þsx2 ;
k2 ¼ 19:3742
|fflfflfflfflffl{zfflfflfflfflffl} 17:4308
|fflfflfflfflffl{zfflfflfflfflffl} 21:5267
|fflfflfflfflffl{zfflfflfflfflffl} þ 0:6252
|fflfflfflffl{zfflfflfflffl} ¼ $57:71:
gasoline
diesel
fuel oil
process loss
Now, we rewrite the strong duality relation (3) by using the decomposition relation (14) as
"
#
X
X X
T T
T
c x ¼
yi bi cB Ci sj þ cB C‘ sj xj
i2M
j2S
i2M
and with some algebraic manipulations we get,
ð15Þ
1006
A. Tehrani Nejad Moghaddam, C. Michelot / European Journal of Operational Research 197 (2009) 999–1011
3
2
cT x ¼
X6
X
xj 7
xj
7
6 X T
cB Ci sj 7bi þ
cTB C‘ sj ‘:
6yi 5
4
b
‘
|fflffl{zfflffl}
i2M
j2S
j2S
|fflffl{zfflffl}i
ð16Þ
‘j
ij
The expressions Ci sj and C‘ sj measure the total variation of the ith final product and the process loss whenever an extra unit of jth scarce
input factor is made available, ceteris paribus. Therefore, the expressions ij and ‘j correspond to the well-known definition of the production
and loss elasticities associated with the jth scarce unit process at the optimum. Simplifying (16)
h
Yi
zfflfflfflfflfflfflfflfflffl}|fflfflfflfflfflfflfflfflffl{
X
X zfflfflfflfflfflfflfflfflfflfflfflfflffl}|fflfflfflfflfflfflfflfflfflfflfflfflffl{
X
T
T
c x ¼
ðyi c
c
ij Þ bi þ
‘j ‘:
B
B
j2S
j2S
T ð17Þ
i2M
We can interpret the relation (17) as follows. In a competitive framework, the producer surplus kT x which is initially attributed to scarce
inputs can be easily transfered to final outputs. Such a reallocation is approximatively possible by extracting the production elasticity of
scarce inputs ij times the input cost vector cTB from the final products’ marginal cost yi . Put it differently, at the optimal solution of model
(7), the total variable input cost cT x is quasi fully explained by the final products through their marginal costs y and a linear combination of
P
the production elasticity j2S cTB ij of scarce input factors. The obtained allocation coefficients Y i depend totally upon the technical and physical relationships that define the operating state of the firm and accounts for all interdependencies in the production plan. Here, contrary to
the RBP adaptation, the numerical values of different elasticities are endogenous to the model and directly provided by the final simplex
tableau.
From relation (17), we observe that a rather small residual part remains still unallocated to final products, i.e., h‘. We define the relative
error term of the first step by ¼ h‘=cTB x which is essentially proportionate to the normal loss coefficients in the vector l. While in almost
real-world production models the loss coefficients are small, the relative error term is expected to be very small too. In empirical studies Y
can be considered as a good approximation of Y and the reallocation procedure can be successfully stopped here.
Referring back to the refinery example, Y and h are calculated as follows:
2
3 2
3 2
3
21:21
5:22 þ 2:90
13:07
6
7 6
7 6
7
Y ¼ 4 48:89 5 4 5:39 þ 3:00 5 ¼ 4 40:48 5; h ¼ 8:674 þ 1:805 ¼ 10:479:
186:46
6:30 þ 4:48
175:66
Within this example, it can be easily verified that the obtained vectors Y and h fully partition the total explicit input cost cT x among final
products and process loss as follows:
T
cT x ¼ b Y þ h‘ ¼ 17477:20 þ 54:41 ¼ 17531:61:
As expected, the relative error term of the first step is negligible, i.e., 0:31%.
3.2. Second step
As shown in (17), the reallocation scheme developed in the first step is quasi additive due to the presence of the process losses. An additive cost allocation pattern requires reassigning the loss-related cost h‘ over final products. In fact, the methodology developed in the second step is generally applicable to the problems in which the objective of the study is concerned with allocating the optimal value of a basic
variable over a sub-set of the RHS.
Let us start the second stage with decomposing the loss variable ‘ in model (7), according to the optimal basic variable definition:
2 3
b
T 1 6 7
ð18Þ
‘ ¼ e ‘ B 4 0 5;
x
where e‘ is the ‘th unit vector (e‘t ¼ 0 for t–‘ and e‘‘ ¼ 1) and eT‘ B1 corresponds to the row of B1 associated with the basic variable ‘ and
contains several blocks referred to the slack variables of model (7). For notational convenience, let # ¼ eT‘ B1 . We decompose the row vector #
into ½#M #‘ #S , referring to final products, process losses and scarce inputs, as they appear in eT‘ B1 . The bloc #M corresponds to marginal
loss content of final products, referring to the additional quantities of losses due to their marginal productions. Similarly, the bloc #S refers to
the additional quantities of loss attributable to an extra unit of scarce inputs. According to the optimal technology, the components of #M and
#S can be negative, zero or positive. Obviously, j#‘ j ¼ 1.
Simplifying (18), we obtain
X
X
‘¼
#i bi þ
tj xj ;
ð19Þ
i2M
j2S
that relates the total process loss of the multi-product firm to joint products b and the limited (fixed) unit processes x through the marginal
allocation coefficients, #i ði 2 MÞ and tj ðj 2 SÞ.
Before proceeding further, we illustrate these concepts within our numerical example. The vector # and its bloc decompositions, #M ; #‘
and #S , are read as the row of the final simplex tableau corresponding to the basic variable ‘ (see Table 1),
# ¼ ½0:136; 0:166; 0:060; |{z}
1 ; 0:026; 0:033; 0:000:
|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
#i
#‘
Pre-multiplying # by the RHS vector yields
#j
A. Tehrani Nejad Moghaddam, C. Michelot / European Journal of Operational Research 197 (2009) 999–1011
1007
‘ ¼ 13:64
|fflffl{zfflffl} 14:503
|fflfflfflffl{zfflfflfflffl} þ 4:3632
|fflfflfflffl{zfflfflfflffl} þ 1:1925
|fflfflfflffl{zfflfflfflffl} þ 0:4995
|fflfflfflffl{zfflfflfflffl} ¼ 5:192:
gasoline
diesel
fuel oil
crude 1
crude 2
Mathematically, for any j 2 S; #j can be obtained via the total differential of the loss material balance constraint in model (7) as
X dxk d‘
or #j ¼ e
sj
#j ¼
¼
lk
gTe
dxj
dxj
k2b
ð20Þ
k–‘
in matrix notations, where e
g T corresponds to the loss row in B, from which the (1) coefficient associated with ‘ is omitted. The vector e
sj
corresponds to the column of B1 associated with the slack variable of the jth scarce input factor, from which #j is extracted. As illustration,
3
2
0:649
6 0:961 7
7
6
7
6
6 0:000 7
7 ¼ 0:026
6
#x1 ¼ ½0:02; 0:01; 0:04; 0:03; 0:00; 0:036
7
6 0:637 7
7
6
4 0:637 5
1:000
and similarly we obtain #x2 ¼ 0:033. We can verify that these two coefficients (0.026 and 0.033) appear in the final simplex tableau (Table 1)
under the heading of slack variables of crude 1 and 2 which are related to the basic loss variable ‘.
e i:
As in the first stage, separating the part of final products in #j requires to introduce the following ðk 1Þ ðk 1Þ allocating matrix C
e i ¼ Diagðaik ; k 2 b; k–‘Þ;
C
i 2 M;
ð21Þ
where the aik are the input-output coefficients as they appear in the ith row of B. In our model, the new oil products allocating matrix are
given by
e gasoline ¼ Diag½0:35; 0:39; 0:19; 0:49; 0:00; 0:29;
C
e diesel ¼ Diag½0:29; 0:35; 0:29; 0:29; 0:00; 0:34;
C
e fuel oil ¼ Diag½0:34; 0:25; 0:48; 0:19; 0:00; 0:34:
C
Using (21), relation (20) is rewritten as
!
X
T
e
sj;
#j e
g
Ci e
ð22Þ
i2M
P
~ i Diagð1; 1; . . . ; 1Þ. An exact reallocation scheme for #j , requires normalizing the input-output coefficients associated with each
where i2I C
column of the matrix A, so that for any j 2 b; eT Anj ¼ 1. While the loss coefficients are relatively small, the required normalization condition
does not skew the cost reallocations. Note that in the first step, the material balance constraint for the process losses plays a ‘‘justified” normalization role and let us extract the maximum information from the technical data that are put into the model. The relation (22) becomes
then
!
X
T
n
e
sj ;
#j ¼ e
g
ð23Þ
C e
i
i2M
where
P
~n
i2M Ci
e n are the normalized products allocating matrix. In the refinery example,
¼ Diagð1; 1; . . . ; 1Þ and the C
i
en
C
gasoline ¼ Diag½0:35714; 0:39393; 0:19791; 0:50515; 0:00000; 0:29897;
en
C
diesel ¼ Diag½0:29592; 0:35353; 0:30208; 0:29897; 0:00000; 0:35051;
e
C nfuel oil ¼ Diag½0:34694; 0:25252; 0:50000; 0:19587; 0:00000; 0:35051:
The part of oil products in the loss contribution associated with crude 1 can be calculated as follows:
en
e n Þe
en
#x1 ¼ e
gT ðC
s x1 þ e
gT ðC
gTðC
s x1 ;
gasoline Þe
diesel s x1 þ e
fuel oil Þe
#x1 ¼ 0:01019
|fflfflfflfflffl{zfflfflfflfflffl} þ 0:00898
|fflfflfflfflffl{zfflfflfflfflffl} þ 0:00732
|fflfflfflfflffl{zfflfflfflfflffl} ¼ 0:026:
gasoline
diesel
fuel oil
The same is applied to #x2 :
#x2 ¼ 0:01038
|fflfflfflfflffl{zfflfflfflfflffl} þ 0:01011
|fflfflfflfflffl{zfflfflfflfflffl} þ 0:01283
|fflfflfflfflffl{zfflfflfflfflffl} ¼ 0:033:
gasoline
diesel
fuel oil
By replacing (23), in the loss respond function (19)
3
2
‘¼
7
X6
X T
6
e n sej xj 7
lB C
7bi :
6#i þ
i
5
4
b
i2M
j2S
|fflfflffl{zfflfflffl}i
ð24Þ
dij
e n sej measures the total variation of the ith product (with the normalized productivity coefficients) whenever an extra unit of
The expression C
i
jth scarce unit process is made available, ceteris paribus. Therefore, the expression dij corresponds to the production elasticity of the jth scarce
input factor through the loss variable ‘.
1008
A. Tehrani Nejad Moghaddam, C. Michelot / European Journal of Operational Research 197 (2009) 999–1011
Simplifying (24) yields
#i
‘¼
ffl}|fflfflfflfflfflfflfflfflfflfflfflfflffl{
X
X zfflfflfflfflfflfflfflfflfflfflfflffl
T
ð#i þ
l dij Þ bi ;
j2S B
ð25Þ
i2M
whose economic interpretation runs as follows: at the optimal solution of the model (7), the total process loss of the firm is fully allocated
among output products through their marginal contributions #i and the production elasticity of scarce unit processes dij . In the numerical
example
2
3 2
3 2
3
0:136
0:006
0:142
6
7 6
7 6
7
# ¼ 4 0:166 5 þ 4 0:006 5 ¼ 4 0:160 5:
0:060
0:007
0:067
It can be easily verified that the computed vector # fully partitions the total loss of the refinery among final oil products:
‘ ¼ #i bi ¼ 14:2545
|fflfflfflfflffl{zfflfflfflfflffl} 13:9469
|fflfflfflfflffl{zfflfflfflfflffl} þ 4:8851
|fflfflfflffl{zfflfflfflffl} ¼ 5:19:
gasoline
diesel
fuel oil
In cost accounting practices, this second step can be independently used for loss allocation issues in complex production settings. In the
above illustration, #i can be viewed as the average contribution of oil products to the refinery’s total loss, and may enable the refiner to
get better insights to the loss allocation pattern of his refinery.
At this stage, we are finally ready to extract the exact average variable cost vector Y . By replacing relation (25) in (17) and simplifying,
we get
Y i
X zfflfflfflfflfflfflfflfflfflfflffl}|fflfflfflfflfflfflfflfflfflfflffl{
ðyi Y i þ h#i Þ bi :
cT x ¼
ð26Þ
i2M
In (26), the expression Y i þ h#i represents the net contribution of the ith output product to the total producer surplus (i.e., kT x in relation (3)).
These net contributions are based on the production elasticity of the scarce inputs which are involved in the production plan and vary following the optimal technology of the multi-product firm. Put it differently, in a short-run competitive situation and within a linear production technology, the total variable input cost cT x can be fully assigned to the output products through the direct and the indirect contribution
of these latter. The direct contributions y correspond to the marginal production costs and are directly obtainable from the optimal solution.
The indirect contributions, Y þ h#, depend upon the production elasticity of input factors and should be calculated, ex-post, from the information available in the final simplex tableau.
In the refining example, the average variable cost vector Y is given by
2
3 2
3
2
3 2
3
21:212
8:12
0:142
14:566
6
7 6
7
6
7 6
7
Y ¼ 4 48:888 5 4 8:39 5 þ ð10:479Þ4 0:160 5 ¼ 4 38:801 5:
186:464
10:78
0:067
176:377
|fflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflffl} |fflfflfflfflfflffl{zfflfflfflfflfflffl} |fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
y
Y
h#
In an extreme case, it might happen that a given joint product receives a negative average cost due to the high production interdependencies
inherent in the multi-output/multi-input firm. In these particular situations, the net contribution of the given joint products to total producer
surplus ðY þ h#Þ exceeds their marginal costs y . This fact has been already noticed by Kaplan and Thompson (1971, pp. 359–360) and Itami
and Kaplan (1980, p. 834). Following these authors, the negative average cost associated with a given joint product, ‘‘may be considered as a
form of subsidy to the product to make it look more profitable because of its overall favorable effect on the company”.
4. Case study
In the previous section, we provided a very simple numerical example to illustrate the two phases of the procedure. In this section, we
apply the methodology in a real-type refinery LP model.
4.1. Refinery scheme
The LP model retained here corresponds to a typical European fluid catalytic cracking (FCC) refinery of 10 million of tons developed by
Institut Francßais du Pétrole.10 The oil product categories considered are propane, butane, naphtha, gasoline, jet fuel (JF), diesel, heating oils
(HO), heavy fuel oils with 1% and 3.5% mass sulfur contents and bitumen (BT).
The standard refining process described by the model can be summarized as follows. In the atmospheric distillation unit, various fractions are separated according to their boiling points. Light fractions are used to make gasoline and naphtha whilst middle fractions are used
to produce gas oil and kerosene. The heaviest fractions are distilled again under vacuum to produce vacuum distillate and vacuum residue.
The major part of vacuum residue is fed to a visbreaker, to reduce the viscosity of the fuel oil products. The vacuum distillate is converted
by a fluid catalytic cracker with and/or without a pretreatment unit (PE) to a gasoline blending component and light cycle oil for blending
into the diesel pool. The sulfur specifications for gasoline, middle and heavy oil products requires the use of various hydrodesulfurization
units (HD, HX and HA). On the other side, a catalytic reforming unit (RF) converts low-octane naphthas into high-octane gasoline blending
10
The refinery LP model contains 10 product demand constraints, 50 product quality constraints, 15 unit process capacity constraints, 725 material balance constraints
(including the loss constraint) and more than 1400 variables.
1009
A. Tehrani Nejad Moghaddam, C. Michelot / European Journal of Operational Research 197 (2009) 999–1011
Table 4
Total variable cost allocated to oil products
Oil products
Production level (Mt/yr) b
Marginal cost ($/t) y
Total allocated cost
Butane
Propane
Naphtha
Gasoline
Jet fuel
Diesel
Heating oil
Heavy fuel oil 1%S
Heavy fuel oil 3.5%S
Bitumen
0.24
0.25
0.35
2.45
0.45
3.02
1.18
0.43
0.43
0.15
409.50
398.60
284.99
326.96
568.04
583.36
529.87
274.57
210.70
265.00
98.28
99.65
99.75
801.04
255.05
1764.67
625.25
118.06
90.60
39.75
T
Total output value ðb y Þ
Total variable cost ðcT x Þ
3992.11
3723.04
Table 5
Total variable cost allocated to active capacity and calibrating constraints
Capacity constraints
Inequality sign
Installed capacity (Mt/yr) x
Shadow price ($/t) k
Total allocated cost
RF
IS
IR
6
6
6
0.24
0.25
0.25
84.88
145.27
162.07
101.86
36.32
40.52
xÞ
Total ðk T 178.69
Utilization of PE
HO importation
BT production
JF importation
HA + HX
P
6
6
6
6
Level (Mt/yr) w
Shadow price ($/t) w
1.80
0.07
0.20
0.10
1.50
15.97
18.05
134.52
48.04
57.41
Total allocated cost
28.74
1.29
26.90
4.80
86.13
Total ðw T wÞ
90.38
Table 6
Production elasticities associated with capacity and calibrating constraints
cTB ij
Propane
Butane
Naphtha
Gasoline
Jet fuel
Diesel
Heating oil
Heavy fuel 1%S
Heavy fuel 3.5%S
Bitumen
RF
IS
IR
PE
HO imp.
BT prod.
JF imp.
HA + HX
55.81
37.65
14.41
9.76
10.09
18.11
9.47
55.57
103.94
1.61
17.16
19.01
9.05
5.04
8.21
8.41
7.39
28.88
37.41
3.03
10.89
11.37
6.33
3.83
5.44
6.37
4.93
21.22
15.44
1.98
113.75
156.67
33.56
46.79
89.07
8.54
69.55
286.45
388.78
296.67
1.35
0.81
5.57
2.61
6.32
3.19
18.08
13.75
9.90
2.42
1.56
0.42
4.65
2.46
4.97
3.06
4.37
12.76
130.84
352.37
9.52
7.74
9.41
4.35
10.58
5.50
9.25
23.96
7.64
6.06
159.66
214.76
21.88
11.27
26.82
9.84
23.24
51.33
272.19
13.56
Table 7
Marginal costs and quasi average costs
Oil products
Production level (Mt/yr) b
Marginal cost ($/t) y
Quasi average cost ($/t) Y
Propane
Butane
Naphtha
Gasoline
Jet fuel
Diesel
Heating oil
Heavy fuel 1%S
Heavy fuel 3.5%S
Bitumen
0.24
0.25
0.35
2.45
0.45
3.02
1.18
0.43
0.43
0.15
409.50
398.60
284.99
326.96
568.04
583.36
529.87
274.57
210.70
265.00
323.39
326.75
223.86
356.95
460.17
539.98
466.20
456.18
145.08
210.85
T
b y
T
b Y
h‘
3992.11
3667.81
324.30
1010
A. Tehrani Nejad Moghaddam, C. Michelot / European Journal of Operational Research 197 (2009) 999–1011
components called reformates where hydrogen is a by-product. Two different isomerization units (IS and IR) are also modeled to convert nparaffins into isoparaffins of substantially higher octane number.
4.2. Allocation of the refinery’s total variable cost to joint oil products
Due to abstracting and simplifying the real refinery system the model loses information and needs to be verified against actual behavior.
The evaluation of cost allocations based on a LP model that shows a wide divergence between its optimal solutions and the actual produc are
tion and cost patterns of a reference year is unacceptable. During the validation phase, various calibrating constraints of type Wx 7 w
added to the model. Since the RHS elements of these constraints are different to zero, we need to perform the same decomposition procedure for the calibrating constraints too.
At the optimum, the total input variable cost (the objective function value) amounts to M$3723.04 and the total process loss ‘ is 0.1 Mt/
y. The petroleum production levels b and their associated marginal costs y are reported in Table 4. Following the duality theorem,
T
cT x ¼ b y kT x þ wT w;
ð27Þ
T where w are the shadow prices associated with the calibrating constraints. As shown in Table 4, total output value ðb y Þ exceeds total varT
iable input cost ðcT x Þ by M$269.07. This difference (i.e., b y cT x ) corresponds to the sum of the economic rents associated with capacity
and calibrating constraints in the short-run (i.e., $178.69 + $90.38 in Table 5).
Since a loss constraint already exists in the model, we only need to extract the MRTS coefficients associated with the ‘‘non product”
active constraints from the final simplex tableau. Commercially available software for large scale models include some especial commands
to extract these coefficients. The mathematical software we use is LAMPS (Linear And Mathematical Programming System) and the available command is TRANSFORMCOLUMNS (Advanced Mathematical Software Ltd., 1991). Table 6 summarizes the required information
which are extracted from the final simplex tableau in order to perform the first phase calculations.
The quasi average production costs Y i ði 2 MÞ are calculated according to relation (17) in Table 7. As it was expected, the relative error
term of the first step, h‘=cT x , is less than 1.5%. We consider that these first-stage cost allocations are good estimations of the final average
costs Y and the procedure can be successfully stop here.
Several remarks are in order. First, since in a multi-input/multi-output production environment the production elasticities ij can be positive, zero or negative, the (quasi) average costs Y given by relation (17) can be less or greater than their corresponding marginal costs y . If
strong substitution effects ðij < 0Þ cause some average costs to exceed their respective marginal costs (e.g., gasoline and heavy fuel 1%S),
then the remaining average costs must fall below marginal costs by more than what would be otherwise necessary to meet the variable
T
input cost requirement cT x ¼ b Y . This mechanism is exactly the same as the Ramsey–Boiteux pricing adaptation if the substitution effects are considered in the model. Second, as indicated in Table 7, the heavy fuel oil 3.5%S receives a negative average cost due to the hight
interdependency effects inherent in the model. This result is particularly of interest because it reflects the reality of the European refining
market in which tougher product specifications and the increased demand for gasoline and middle distillates have resulted in large price
differentials between these latter and heavy fuel oils (specially the 3.5%S grade) that have globally become a refinery by-product. Note that,
this ‘‘realistic” negative cost share is not obtainable within the Shapely value approach due to its monotonicity property which always
guarantee non-negative allocations.
5. Conclusion
We tackled an almost 50-years old problem of how fully allocating the joint costs of a multi-product firm over its output products via LP.
First, the non additivity issue of the LP-based allocations in general was reviewed with an economic interpretation of the residual part as
the producer surplus. Then, by extending the principle of marginal contribution, a two-phase procedure based on the marginal production
costs and the production elasticity of input factors was provided to achieve an additive joint cost allocation pattern having the least distortion from the marginal costs. The proposed procedure corresponds to the realistic description of the complex causal relationships between inputs and outputs and vary following the optimal technology of the multi-product firm.
The distinguished feature of this approach is that it requires no more information (as in Ramsey–Boiteux pricing) or iterative computations (as in Shapely value approach) than what is provided by the final simplex tableau. Surprisingly, the marginal coefficients associated
with the final simplex tableau have been ignored so far in most of the theoretical or empirical studies using linear programming. The procedure was also applied in a real case study to fully allocate the total input variable cost of a European-type refinery to its final oil products.
We showed that the first stage provides good approximations of the final cost allocations and, in most of the large-scale applications, the
procedure can be successfully stopped without the second stage.
References
Advanced Mathematical Software Ltd., 1991. Linear And Mathematical Programming System (LAMPS), User Guide, Version 1.66.
Babusiaux, D., Pierru, A., 2007. Modelling and allocation of CO2 emissions in a multiproduct industry: The case of oil refining. Applied Energy 84, 828–841.
Baker, K., Taylor, R., 1979. A linear programming framework for cost allocation and external acquisition when reciprocal services exist. The Accounting Review 24, 784–790.
Balachandran, B.V., Ramakrishhnan, R.T.S., 1996. Joint cost allocation for multiple lots. Management Science 42 (2), 247–258.
Baumol, W.J., Bradford, D.F., 1970. Optimal departure from marginal cost pricing. American Economic Review 60 (3), 265–283.
Biddle, G.C., Steinberg, R., 1984. Allocations of joint and common costs. Journal of Accounting Literature 3, 1–45.
Cheng, C.S.A., Manes, R.P., 1992. The marginal approach to joint cost allocation: A model for practical application. Journal of Management Accounting Research 4 (44), 44–63.
Dahl, C., Sterner, T., 1991. Analyzing gasoline demand elasticities – A survey. Energy Economics 13 (3), 203–210.
Damus, S., 1984. Ramsey pricing by US railroads. Can it exist? Journal of Transport Economics and Policy, 51–61.
Drury, C., 2000. Management and Cost Accounting, fifth ed. Business Press, Thomson Learning.
Eckel, L., 1976. Arbitrary and incorrigible allocations. The Accounting Review, 764–777.
Fiertz, R., Monico, C., 2004. Cost Allocation. Aviation Economics and Finance. National Civil Aviation Review Communication. <http://ntl.bts.gov/lib/000/400/481/costallo>.
Frasco, G., Jung, C., 2001. When producer surplus underestimates rents. Atlantic Economic Journal 29 (4), 393–405.
Gatti, J.F., Grinnell, D.J., 2000. Joint cost allocations: Measuring and promoting productivity and quality improvements. Journal of Cost Management, 13–21.
Greenberg, H.J., 1973. A Lagrangian property for homogeneous programs. Journal of Optimization Theory and Applications 12 (1), 99–102.
A. Tehrani Nejad Moghaddam, C. Michelot / European Journal of Operational Research 197 (2009) 999–1011
1011
Hartley, R.V., 1971. Decision making when joint products are involved. The Accounting Review, 746–755.
Itami, H., Kaplan, R.S., 1980. An activity analysis approach to unit costing with multiple interactive products. Management Science 26 (8), 826–839.
Jensen, D.L., 1974. The role of cost in pricing joint products: A case of production in fixed proportions. The Accounting Review, 465–476.
Kaplan, RS., Atkinson, AA., 1989. Advanced Management Accounting. Prentice Hall, Inc., Englewood Cliffs, NJ.
Kaplan, R.S., Thompson, G.L., 1971. Overhead allocations via mathematical programming models. The Accounting Review, 352–364.
Kaplan, R.S., Welam, U., 1974. Overhead allocations with imperfect markets and non-linear technology. The Accounting Review, 477–484.
Lemaire, J., 1984. An application of game theory: Cost allocation. Astin Bulletin 14 (1), 61–81.
Manes, R.P., Cheng, C.S.A., 1988. the marginal approach to joint cost allocation: Theory and application. Studies in Accounting Research, vol. 29, American Accounting
Association.
Manes, R.P., Smith, V.L., 1965. Economic joint cost theory and accounting practice. Accounting Review, 31–35.
Mishan, E.J., 1968. What is producer’s surplus? American Economic Review, 1269–1282.
Moulin H. 2001. Axiomatic cost and surplus-sharing. In: Arrow, K., Sen, A., Suzumura, K. (Eds), Handbook of Social Choice and Welfare, vol. 1., North-Holland, 2001, Journal of
Economic Theory 87, 275–312.
Paris, Q., 1991. An Economic Interpretation of Linear Programming. Iowa State University Press, Ames, Iowa.
Paris, Q., 2006. Lecture Notes in Symmetric Programming. Department of Agricultural Economics. University of California, Davis, California.
Rybczynski, T.M., 1955. Factor endowment and relative commodity prices. Econometrica 22, 336–341.
Shubik, M., 1962. Incentives decentralized control, the assignment of joint costs and internal pricing. Management Science, 325–343.
Thomas, A.L., 1969. The allocation problem in financial accounting theory. Studies in Accounting Research, vol. 3, American Accounting Association.
Thomas, A.L., 1974. The allocation problem, part two. Studies in Accounting Research, vol. 9, American Accounting Association.
Verrecchia, R.E., 1982. An analysis of two cost allocation cases. The Accounting Review 57 (3), 579–593.
Williams, H.P., 1981. Reallocating the cost of dependant decisions. Applied Economics 13, 89–98.
Williams, H.P., Butler, M., 2002. Fairness versus efficiency in charging for the use of common facilities. Journal of the Operational Research Society 53, 1324–1329.
Young, H.P., 1985. Producer incentives in cost allocation. Econometrica 53 (4), 757–765.
Zimmerman, J., 1979. The cost and benefit of cost allocation. Accounting Review, 504–521.