Chapter 2. Dynamic panel data models
School of Economics and Management - University of Geneva
Christophe Hurlin, Université of Orléans
University of Orléans
April 2018
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
1 / 209
1. Introduction
De…nition (Dynamic panel data model)
We now consider a dynamic panel data model, in the sense that it contains
(at least) one lagged dependent variables. For simplicity, let us consider
yit = γyi ,t
1
0
+ β xit + αi + εit
for i = 1, .., n and t = 1, .., T . αi and λt are the (unobserved) individual
and time-speci…c e¤ects, and εit the error (idiosyncratic) term with
E(εit ) = 0, and E(εit εjs ) = σ2ε if j = i and t = s, and E(εit εjs ) = 0
otherwise.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
2 / 209
1. Introduction
Remark
In a dynamic panel model, the choice between a …xed-e¤ects formulation
and a random-e¤ects formulation has implications for estimation that are
of a di¤erent nature than those associated with the static model.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
3 / 209
1. Introduction
Dynamic panel issues
1
If lagged dependent variables appear as explanatory variables, strict
exogeneity of the regressors no longer holds. The LSDV is no longer
consistent when n tends to in…nity and T is …xed.
2
The initial values of a dynamic process raise another problem. It
turns out that with a random-e¤ects formulation, the interpretation
of a model depends on the assumption of initial observation.
3
The consistency property of the MLE and the GLS estimator also
depends on the way in which T and n tend to in…nity.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
4 / 209
Introduction
The outline of this chapter is the following:
Section 1: Introduction
Section 2: Dynamic panel bias
Section 3: The IV (Instrumental Variable) approach
Subsection 3.1: Reminder on IV and 2SLS
Subsection 3.2: Anderson and Hsiao (1982) approach
Section 4: The GMM (Generalized Method of Moment) approach
Subsection 4.1: General presentation of GMM
Subsection 4.2: Application to dynamic panel data models
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
5 / 209
Section 2
The Dynamic Panel Bias
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
6 / 209
2. The dynamic panel bias
Objectives
1
Introduce the AR(1) panel data model.
2
Derive the semi-asymptotic bias of the LSDV estimator.
3
Understand the sources of the dynamic panel bias or Nickell’s bias.
4
Evaluate the magnitude of this bias in a simple AR(1) model.
5
Asses this bias by Monte Carlo simulations.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
7 / 209
2. The dynamic panel bias
Dynamic panel bias
1
The LSDV estimator is consistent for the static model whether the
e¤ects are …xed or random.
2
On the contrary, the LSDV is inconsistent for a dynamic panel data
model with individual e¤ects, whether the e¤ects are …xed or random.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
8 / 209
2. The dynamic panel bias
De…nition (Nickell’s bias)
The biais of the LSDV estimator in a dynamic model is generaly known as
dynamic panel bias or Nickell’s bias (1981).
Nickell, S. (1981). Biases in Dynamic Models with Fixed E¤ects,
Econometrica, 49, 1399–1416.
Anderson, T.W., and C. Hsiao (1982). Formulation and Estimation of
Dynamic Models Using Panel Data, Journal of Econometrics, 18, 47–82.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
9 / 209
2. The dynamic panel bias
De…nition (AR(1) panel data model)
Consider the simple AR(1) model
yit = γyi ,t
1
+ αi + εit
for i = 1, .., n and t = 1, .., T . For simplicity, let us assume that
αi = α + αi
to avoid imposing the restriction that ∑ni=1 αi = 0 or E (αi ) = 0 in the
case of random individual e¤ects.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
10 / 209
2. The dynamic panel bias
Assumptions
1
The autoregressive parameter γ satis…es
jγj < 1
2
3
The initial condition yi 0 is observable.
The error term satis…es with E (εit ) = 0, and E (εit εjs ) = σ2ε if j = i
and t = s, and E (εit εjs ) = 0 otherwise.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
11 / 209
2. The dynamic panel bias
Dynamic panel bias
In this AR(1) panel data model, we will show that
b LSDV 6= γ
plim γ
n !∞
dynamic panel bias
b LSDV = γ
plim γ
n,T !∞
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
12 / 209
2. The dynamic panel bias
The LSDV estimator is de…ned by (cf. chapter 1)
b
αi = y i
n
b LSDV
γ
=
b LSDV y i ,
γ
T
∑ ∑ (yi ,t
1
1
1)
y i,
2
i =1 t =1
n
!
1
T
∑ ∑ (yi ,t
y i,
1
1 ) (yit
yi )
i =1 t =1
xi =
1
T
T
∑ xit
t =1
C. Hurlin (University of Orléans)
yi =
1
T
T
∑ yit
y i,
t =1
Advanced Econometrics II
1
=
1
T
!
T
∑ yi ,t
1
t =1
April 2018
13 / 209
2. The dynamic panel bias
De…nition (bias)
The bias of the LSDV estimator is de…ned by:
n
b LSDV
γ
γ =
T
∑ ∑ (yi ,t
1
y i,
i =1 t =1
n
1
T
∑ ∑ (yi ,t
1
i =1 t =1
C. Hurlin (University of Orléans)
1)
2
!
Advanced Econometrics II
y i,
1 ) ( εit
εi )
!
April 2018
14 / 209
2. The dynamic panel bias
The bias of the LSDV estimator can be rewritten as:
n
T
∑ ∑ (yi ,t
b LSDV
γ
γ=
C. Hurlin (University of Orléans)
i =1 t =1
n
1
y i,
1 ) ( εit
1
y i,
T
∑ ∑ (yi ,t
i =1 t =1
Advanced Econometrics II
1)
εi ) / (nT )
2
/ (nT )
April 2018
15 / 209
2. The dynamic panel bias
Let us consider the numerator. Because εit are (1) uncorrelated with αi
and (2) are independently and identically distributed, we have
plim
n !∞
=
plim
n !∞
|
1
nT
1
nT
n
T
∑ ∑ (yi ,t
∑ ∑ yi ,t
n !∞
|
C. Hurlin (University of Orléans)
1 ) ( εit
t =1 i =1
{z
1
nT
T
n
∑ ∑ y i,
t =1 i =1
{z
N3
plim
1 εit
N1
plim
y i,
1
i =1 t =1
T n
}
n !∞
|
1
nT
εi )
T
n
∑ ∑ yi ,t
t =1 i =1
{z
N2
1 T n
+ plim
∑ ∑ y i,
n !∞ nT t =1 i =1
}
|
{z
1 εit
N4
Advanced Econometrics II
1 εi
}
1 εi
}
April 2018
16 / 209
2. The dynamic panel bias
Theorem (Weak law of large numbers, Khinchine)
If fXi g , for i = 1, .., m is a sequence of i.i.d. random variables with
E (Xi ) = µ < ∞, then the sample mean converges in probability to µ:
1 m
p
Xi ! E (Xi ) = µ
m i∑
=1
or
plim
m !∞
C. Hurlin (University of Orléans)
1 m
Xi = E (Xi ) = µ
m i∑
=1
Advanced Econometrics II
April 2018
17 / 209
2. The dynamic panel bias
By application of the WLLN (Khinchine’s theorem)
N1 = plim
n !∞
1
nT
n
T
∑ ∑ yi ,t
1 εit
= E (yi ,t
1 εit )
i =1 t =1
Since (1) yi ,t 1 only depends on εi ,t
uncorrelated, then we have
E (yi ,t
1,
εi ,t
1 εit )
2
and (2) the εit are
=0
and …nally
N1 = plim
n !∞
C. Hurlin (University of Orléans)
1
nT
n
T
∑ ∑ yi ,t
1 εit
=0
i =1 t =1
Advanced Econometrics II
April 2018
18 / 209
2. The dynamic panel bias
For the second term N2 , we have:
N2 =
=
=
=
plim
n !∞
plim
n !∞
plim
n !∞
plim
n !∞
C. Hurlin (University of Orléans)
1
nT
1
nT
1
nT
n
T
∑ ∑ yi ,t
1 εi
i =1 t =1
n
T
∑ εi ∑ yi ,t
i =1
n
1
t =1
∑ εi T y i ,
1
as y i ,
i =1
n
1
εi y i ,
n i∑
=1
1
=
1
T
T
∑ yi ,t
1
t =1
1
Advanced Econometrics II
April 2018
19 / 209
2. The dynamic panel bias
In the same way:
N3 = plim
n !∞
N4 = plim
n !∞
1
nT
1
nT
n
T
∑ ∑ y i,
i =1 t =1
n
∑
1 εit
= plim
n !∞
T
∑ y i,
i =1 t =1
C. Hurlin (University of Orléans)
1 εi = plim
n !∞
1
nT
n
T
∑ y i , 1 ∑ εit =
i =1
1
T
nT
t =1
plim
n !∞
n
∑ y i,
i =1
Advanced Econometrics II
1 εi = plim
n !∞
1 n
y i,
n i∑
=1
1 n
y i,
n i∑
=1
April 2018
1ε
1 εi
20 / 209
2. The dynamic panel bias
The numerator of the bias expression can be rewritten as
plim
n !∞
=
1
nT
0
|{z}
N1
=
plim
n !∞
n
T
∑ ∑ (yi ,t
1
y i,
1 ) ( εit
εi )
i =1 t =1
plim
n !∞
|
1 n
εi y i , 1
n i∑
=1
{z
}
1 n
y i,
n i∑
=1
C. Hurlin (University of Orléans)
N2
1 εi
plim
n !∞
|
1 n
y i,
n i∑
=1
{z
N3
Advanced Econometrics II
1 εi + plim
}
n !∞
|
1 n
y i,
n i∑
=1
{z
N4
April 2018
1 εi
}
21 / 209
2. The dynamic panel bias
Solution
The numerator of the expression of the LSDV bias satis…es:
plim
n !∞
1
nT
n
∑
T
∑ (yi ,t
1
y i,
1 ) ( εit
εi ) =
i =1 t =1
C. Hurlin (University of Orléans)
Advanced Econometrics II
plim
n !∞
1 n
y i,
n i∑
=1
1 εi
April 2018
22 / 209
2. The dynamic panel bias
Remark
n
T
∑ ∑ (yi ,t
b LSDV
γ
plim
n !∞
1
nT
n
∑
γ=
i =1 t =1
n
1
y i,
1 ) ( εit
1
y i,
T
∑ ∑ (yi ,t
i =1 t =1
1)
εi ) / (nT )
2
/ (nT )
T
∑ (yi ,t
1
y i,
1 ) ( εit
εi ) =
i =1 t =1
plim
n !∞
1 n
y i,
n i∑
=1
1 εi
b LSDV is biased when n
If this plim is not null, then the LSDV estimator γ
tends to in…nity and T is …xed.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
23 / 209
2. The dynamic panel bias
Let us examine this plim
plim
n !∞
1 n
y i,
n i∑
=1
1 εi
We know that
yit
=
=
=
=
γyi ,t
2
γ yi ,t
γ3 yi ,t
1
+ αi + εit
2 + αi (1 + γ ) + εit + γεi ,t 1
2
+ εit + γεi ,t
3 + αi 1 + γ + γ
1
+ γ2 εi ,t
2
...
= γt yi 0 +
C. Hurlin (University of Orléans)
1
1
γt
α + εit + γεi ,t
γ i
1
Advanced Econometrics II
+ γ2 εi ,t
2
+ ... + γt
1
April 2018
εi 1
24 / 209
2. The dynamic panel bias
For any time t, we have:
yit
For yi ,t
1,
= εit + γεi ,t 1 + γ2 εi ,t
1 γt
α + γt yi 0
+
1 γ i
2
+ ... + γt
1
εi 1
we have:
yi ,t
1
= εi ,t 1 + γεi ,t 2 + γ2 εi ,t 3 + ... + γt
1 γt 1
+
α + γt 1 yi 0
1 γ i
C. Hurlin (University of Orléans)
Advanced Econometrics II
2
εi 1
April 2018
25 / 209
2. The dynamic panel bias
yi ,t
1
= εi ,t
1 + γεi ,t
Summing yi ,t
1
2
2 + γ εi ,t
2
εi 1 +
1
γt 1
α + γt
1 γ i
1
yi 0
over t, we get:
T
∑ yi ,t
t
3 + ... + γ
1
= εi ,T
t =1
+
C. Hurlin (University of Orléans)
(T
1
+
1
1
γ2
εi ,T
γ
2
1)
T γ + γT
(1
γ )2
Advanced Econometrics II
+ ... +
αi +
1
γT 1
εi 1
1 γ
1 γT
yi 0
1 γ
April 2018
26 / 209
2. The dynamic panel bias
yi ,t
1
= εi ,t
1 + γεi ,t
2
2 + γ εi ,t
t
3 + ... + γ
2
εi 1 +
1
γt 1
α + γt
1 γ i
1
yi 0
Proof: We have (each lign corresponds to a date)
T
∑ yi ,t
1
= yi ,T
1
+ yi ,T
2
+ .. + yi ,1 + yi ,0
t =1
= εi ,T
1 + γεi ,T
+εi ,T
2
T
2 + .. + γ
+ γεi ,T
3
2
+ ... + γT
γT 1
αi + γT 1 yi 0
1 γ
1 γT 2
3
αi + γT 2 yi 0
εi 1 +
1 γ
εi 1 +
1
+..
+εi ,1 +
1
1
γ1
α + γyi 0
γ i
+yi 0
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
27 / 209
2. The dynamic panel bias
Proof (ct’d): For the individual e¤ect αi , we have
αi
1
=
=
=
γ
αi
1
γ
αi
1 γ
αi T
C. Hurlin (University of Orléans)
1
T
γ+1
1
γ
γ2 + ... + 1
γ2
..
γT
γT
1
1
1 γT
1 γ
T γ 1 + γT
T
(1
γ )2
Advanced Econometrics II
April 2018
28 / 209
2. The dynamic panel bias
So, we have
y i,
1
=
=
1
T
1
T
+
C. Hurlin (University of Orléans)
T
∑ yi ,t
1
t =1
εi ,T
T
+
1
Tγ
(1
1
1
γ2
εi ,T
γ
1 + γT
γ )2
2
+ ... +
αi +
Advanced Econometrics II
1
γT 1
εi 1
1 γ
!
1 γT
yi 0
1 γ
April 2018
29 / 209
2. The dynamic panel bias
Finally, the plim is equal to
plim
n !∞
= plim
n !∞
+
1 n
y i,
n i∑
=1
1 n
n i∑
=1
T
Tγ
(1
C. Hurlin (University of Orléans)
1 εi
1
T
εi ,t
1
1 + γT
γ )2
1 γT 1
+ ... +
εi 1
1 γ
!
1
1 γT
αi +
yi 0
(εi 1 + ... + εiT )
1 γ
T
+
1
1
γ2
εi ,t
γ
Advanced Econometrics II
2
April 2018
30 / 209
2. The dynamic panel bias
Because εit are i.i.d, by a law of large numbers, we have:
plim
n !∞
= plim
n !∞
+
=
σ2ε
T2
=
σ2ε
T2
1 n
y i,
n i∑
=1
1 n
n i∑
=1
T
Tγ
(1
1
1
T
1 εi
1
T
εi ,T
1
1 + γT
γ )2
1 γT 1
+ ... +
εi 1
1 γ
!
1 γT
1
αi +
yi 0
(εi 1 + ... + εiT )
1 γ
T
+
1
1
γ2
εi ,T
γ
γ 1 γ2
1 γT
+
+ ... +
γ
1 γ
1 γ
T
Tγ 1 + γ
(1
C. Hurlin (University of Orléans)
2
1
γ )2
Advanced Econometrics II
April 2018
31 / 209
2. The dynamic panel bias
Theorem
If the errors terms εit are i.i.d. 0, σ2ε , we have:
plim
n !∞
=
=
C. Hurlin (University of Orléans)
1
nT
plim
n !∞
n
T
∑ ∑ (yi ,t
1
y i,
n i∑
=1
σ2ε T
T2
1
y i,
1 ) ( εit
εi )
i =1 t =1
n
Tγ
(1
1 εi
1 + γT
γ )2
Advanced Econometrics II
April 2018
32 / 209
2. The dynamic panel bias
b LSDV
By similar manipulations, we can show that the denominator of γ
converges to:
1
n !∞ nT
plim
=
σ2ε
1
γ2
C. Hurlin (University of Orléans)
n
T
∑ ∑ (yi ,t
1
y i,
1)
2
i =1 t =1
1
1
T
2γ
(1
γ )2
Advanced Econometrics II
T
T γ 1 + γT
T2
!
April 2018
33 / 209
2. The dynamic panel bias
So, we have :
b LSDV
plim (γ
n !∞
1
nT
= plim
n !∞
=
C. Hurlin (University of Orléans)
γ)
n
T
∑ ∑ (yi ,t
y i , 1 ) (εit
1
i =1 t =1
n T
1
y i , 1 )2
nT ∑ ∑ (yi ,t 1
i =1 t =1
σ2ε (T
T2
σ2ε
1 γ2
1
1
T
εi )
T γ 1 + γT )
(1 γ )2
2γ
(1 γ )2
Advanced Econometrics II
(T T γ 1 + γT )
T2
April 2018
34 / 209
2. The dynamic panel bias
This semi-asymptotic bias can be rewriten as:
b LSDV
plim (γ
γ)
n !∞
=
1 γ
1 +γ
T
T2
T
2γ
(1 γ )2
(1 + γ ) T
=
(1
C. Hurlin (University of Orléans)
γ) T 2
T
1 + γT
Tγ
(T
Tγ
2γ
(1 γ )2
Advanced Econometrics II
Tγ
1 + γT )
1 + γT
(T
Tγ
1 + γT )
April 2018
35 / 209
2. The dynamic panel bias
Fact
If T also tends to in…nity, then the numerator converges to zero, and
denominator converges to a nonzero constant σ2ε / 1 γ2 , hence the
LSDV estimator of γ and αi are consistent.
Fact
b LSDV and
If T is …xed, then the denominator is a nonzero constant, and γ
b
αi are inconsistent estimators when n is large.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
36 / 209
2. The dynamic panel bias
Theorem (Dynamic panel bias)
In a dynamic panel AR(1) model with individual e¤ects, the
semi-asymptotic bias (with n) of the LSDV estimator on the autoregressive
parameter is equal to:
b LSDV
plim (γ
n !∞
(1 + γ ) T
γ) =
C. Hurlin (University of Orléans)
(1
γ) T 2
T
Tγ
2γ
(1 γ )2
Advanced Econometrics II
1 + γT
(T
Tγ
1 + γT )
April 2018
37 / 209
2. The dynamic panel bias
Theorem (Dynamic panel bias)
For an AR(1) model, the dynamic panel bias can be rewriten as :
b LSDV
plim (γ
n !∞
γ) =
C. Hurlin (University of Orléans)
1+γ
T 1
1
1
(1
1 1 γT
T 1 γ
2γ
γ ) (T
Advanced Econometrics II
1)
1
1 γT
T (1 γ )
April 2018
1
38 / 209
2. The dynamic panel bias
Fact
b LSDV is caused by having to eliminate the individual
The dynamic bias of γ
e¤ects αi from each observation, which creates a correlation of order
(1/T ) between the explanatory variables and the residuals in the
transformed model
(yit
0
B
y i ) = γ @yi ,t
0
+ @εit
C. Hurlin (University of Orléans)
y i, 1
| {z }
1
1
depends on past value of εit
εi
|{z}
depends on past value of εit
Advanced Econometrics II
1
C
A
A
April 2018
39 / 209
2. The dynamic panel bias
Intuition of the dynamic bias
y i ) = γ (yi ,t
(yit
with cov (y i ,
cov (y i ,
1 , εi )
1
y i,
1 ) + ( εit
6= 0 since
1 , εi )
= cov
= cov
=
C. Hurlin (University of Orléans)
1
T
1
T
T
∑ yi ,t
t =1
T
∑ yi ,t
t =1
1
1,
T
1
1,
T
T
∑ εit
t =1
T
∑ εit
t =1
1
cov ((yi 1 + ... + yiT
T2
Advanced Econometrics II
εi )
!
!
1 ) , ( εi 1
+ ... + εiT ))
April 2018
40 / 209
2. The dynamic panel bias
Intuition of the dynamic bias
(yit
y i ) = γ (yi ,t
1
y i,
1 ) + ( εit
εi ) with cov (y i ,
If we approximate yit by εit (in fact yit also depend on εit
we have
cov (y i ,
1 , εi )
=
'
'
C. Hurlin (University of Orléans)
1,
1 , εi )
εt
6= 0
2 , ...)
then
1
cov ((yi 1 + ... + yiT 1 ) , (εi 1 + ... + εiT ))
T2
1
(cov (εi ,1 , εi ,1 ) + ... + (cov (εi ,T 1 , εi ,T 1 )))
T2
(T 1) σ2ε
6= 0
T2
Advanced Econometrics II
April 2018
41 / 209
2. The dynamic panel bias
Intuition of the dynamic bias
(yit
y i ) = γ (yi ,t
1
y i,
1 ) + ( εit
εi ) with cov (y i ,
1 , εi )
6= 0
If we approximate yit by εit then we have
cov (y i ,
1 , εi )
=
1) σ2ε
(T
T2
By taking into account all the interaction terms, we have shown that
plim
n !∞
1 n
y i,
n i∑
=1
1 εi = cov (y i ,
C. Hurlin (University of Orléans)
1 , εi ) =
σ2ε (T
T2
Advanced Econometrics II
1) γ
(1
1 + γT
γ )2
April 2018
42 / 209
2. The dynamic panel bias
Remarks
b LSDV
plim (γ
n !∞
γ) =
1+γ
T 1
1
1
(1
1 1 γT
T 1 γ
2γ
γ ) (T
1)
1
1 γT
T (1 γ )
1
1
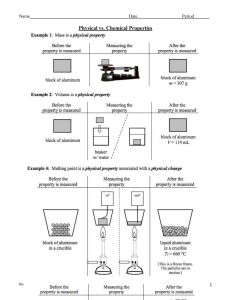
When T is large, the right-hand-side variables become asymptotically
uncorrelated.
2
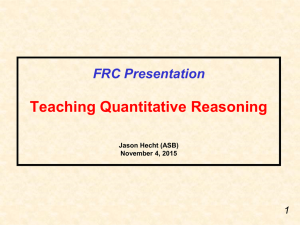
For small T , this bias is always negative if γ > 0.
3
The bias does not go to zero as γ goes to zero.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
43 / 209
2. The dynamic panel bias
Dynam ic pane l bias
Semi-asymptotic bias
0
-0.05
-0.1
-0.15
-0.2
T=10
T=30
T=50
T=100
-0.25
-0.3
0
C. Hurlin (University of Orléans)
0.2
0.4
0.6
Advanced Econometrics II
0.8
1
April 2018
44 / 209
2. The dynamic panel bias
T=10
1
T=30
1
True value of
plim of the LSDV estimator
True value of
plim of the LSDV estimator
0.8
semi-asymptotic bias
semi-asymptotic bias
0.8
0.6
0.4
0.2
0.4
0.2
0
0
-0.2
-0.2
0
0.2
0.4
0.6
0.8
0
1
T=50
1
0.2
0.4
0.6
0.8
1
0.6
0.8
1
T=100
1
True value of
plim of the LSDV estimator
True value of
plim of the LSDV estimator
0.9
0.8
0.8
semi-asymptotic bias
semi-asymptotic bias
0.6
0.6
0.4
0.2
0.7
0.6
0.5
0.4
0.3
0.2
0
0.1
-0.2
0
0
0.2
C. Hurlin (University of Orléans)
0.4
0.6
0.8
1
0
0.2
Advanced Econometrics II
0.4
April 2018
45 / 209
2. The dynamic panel bias
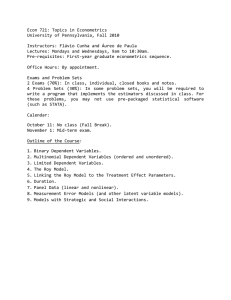
0
Dynam ic bias for T=10 (in % of the true value )
relative bias (in %)
-20
-40
-60
-80
T=10
T=30
T=50
T=100
-100
-120
0.1
C. Hurlin (University of Orléans)
0.2
0.3
0.4
0.5
0.6
Advanced Econometrics II
0.7
0.8
0.9
April 2018
46 / 209
2. The dynamic panel bias
Monte Carlo experiments
How to check these semi-asymptotic formula with Monte Carlo
simulations?
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
47 / 209
2. The dynamic panel bias
Step 1: parameters
Let assume that γ = 0.5, σ2ε = 1 and εit
i .i .d .
N (0, 1) .
Simulate n individual e¤ects αi once at all. For instance, we can use a
uniform distribution
αi
U[ 1,1 ]
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
48 / 209
2. The dynamic panel bias
Step 2: Monte Carlo pseudo samples
Simulate n (typically n = 1, 000) i.i.d. sequences fεit gTt=1 for a given
value of T (typically T = 10)
Generate n sequences fyit gTt=1 for i = 1, .., n with the model:
yit = γyi ,t
1
+ αi + εit
Repeat S times the step 2 in order to generate S = 5, 000 sequences
n
o
(s ) T
yit
for s = 1, .., S for each cross-section unit i = 1, ..., n
t =1
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
49 / 209
2. The dynamic panel bias
Step 3: LSDV estimates on pseudo series
For each pseudo sample s = 1, ..., S, consider the empirical model
yits = γyis,t
1
+ αi + µit
i = 1, .., n
t = 1, ...T
b sLSDV .
and compute the LSDV estimates γ
b LSDV based on
Compute the average bias of the LSDV estimator γ
the S Monte Carlo simulations
av .bias =
C. Hurlin (University of Orléans)
1
S
S
∑ γbsLSDV
γ
s =1
Advanced Econometrics II
April 2018
50 / 209
2. The dynamic panel bias
Step 4: Semi-asymptotic bias
1
Repeat this experiment for various cross-section dimensions n:
when n increases,the average bias should converge to
b LSDV
plim (γ
n !∞
2
γ) =
1+γ
T 1
1
1
(1
1 1 γT
T 1 γ
2γ
γ ) (T
1)
1
1
1 γT
T (1 γ )
Repeat this this experiment for various time dimensions T : when T
increases,the average bias should converge to 0.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
51 / 209
2. The dynamic panel bias
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
52 / 209
2. The dynamic panel bias
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
53 / 209
2. The dynamic panel bias
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
54 / 209
2. The dynamic panel bias
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
55 / 209
2. The dynamic panel bias
350
Histogram of the LSDV estimates for=0.5, T=10 and n=1000
300
Number of simulations
250
200
150
100
50
0
0.3
0.31
0.32
0.33
0.34
h
C. Hurlin (University of Orléans)
0.35
0.36
0.37
0.38
at
Advanced Econometrics II
April 2018
56 / 209
2. The dynamic panel bias
Click me!
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
57 / 209
2. The dynamic panel bias
-0.15
Theoretical semi-asymptotic bias
MC average bias
-0.155
-0.16
-0.165
-0.17
-0.175
-0.18
0
200
400
600
800
1000
Sample size n
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
58 / 209
2. The dynamic panel bias
Question: What is the importance of the dynamic bias in micro-panels?
”Macroeconomists should not dismiss the LSDV bias as
insigni…cant. Even with a time dimension T as large as 30, we
…nd that the bias may be equal to as much 20% of the true value
of the coe¢ cient of interest.” (Judson et Owen, 1999, page 10)
Judson R.A. and Owen A. (1999), Estimating dynamic panel data models: a
guide for macroeconomists. Economics Letters, 1999, vol. 65, issue 1, 9-15.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
59 / 209
2. The dynamic panel bias
Finite Sample results (Monte Carlo simulations)
n
T
γ
10
10
0.5
50
10
0.5
b LSDV
Avg. γ
100
10
10
Avg. bias
0.3282
0.1718
0.3317
0.1683
0.5
0.3338
0.1662
50
0.5
0.4671
0.0329
50
50
0.5
0.4688
0.0321
100
50
0.5
0.4694
0.0306
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
60 / 209
2. The dynamic panel bias
Finite Sample results (Monte Carlo simulations)
n
T
γ
10
10
0.3
50
10
0.3
100
10
10
b LSDV
Avg. γ
Avg. bias
0.3686
0.0686
0.3743
0.0743
0.3
0.3753
0.0753
50
0.3
0.3134
0.0134
50
50
0.3
0.3133
0.0133
100
50
0.5
0.3142
0.0142
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
61 / 209
2. The dynamic panel bias
Fact (smearing e¤ect)
The LSDV for dynamic individual-e¤ects model remains biased with the
introduction of exogenous variables if T is small; for details of the
derivation, see Nickell (1981); Kiviet (1995).
yit = α + γyi ,t
1
0
+ β xit + αi + εit
b LSDV and b
In this case, both estimators γ
βLSDV are biased.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
62 / 209
2. The dynamic panel bias
What are the solutions?
Consistent estimator of γ can be obtained by using:
1
ML or FIML (but additional assumptions on yi 0 are necessary)
2
Feasible GLS (but additional assumptions on yi 0 are necessary)
3
LSDV bias corrected (Kiviet, 1995)
4
IV approach (Anderson and Hsiao, 1982)
5
GMM approach (Arenallo and Bond, 1985)
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
63 / 209
2. The dynamic panel bias
What are the solutions?
Consistent estimator of γ can be obtained by using:
1
ML or FIML (but additional assumptions on yi 0 are necessary)
2
Feasible GLS (but additional assumptions on yi 0 are necessary)
3
LSDV bias corrected (Kiviet, 1995)
4
IV approach (Anderson and Hsiao, 1982)
5
GMM approach (Arenallo and Bond, 1985)
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
64 / 209
2. The dynamic panel bias
Key Concepts Section 2
1
AR(1) panel data model
2
Semi-asymptotic bias
3
Dynamic panel bias (Nickell’s bias)
4
Monte Carlo experiments
5
Magnitude of the dynamic panel bias
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
65 / 209
Section 3
The Instrumental Variable (IV) approach
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
66 / 209
Subsection 3.1
Reminder on IV and 2SLS
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
67 / 209
3.1 Reminder on IV and 2SLS
Objectives
1
De…ne the endogeneity bias and the smearing e¤ect.
2
De…ne the notion of instrument or instrumental variable.
3
Introduce the exogeneity and relevance properties of an instrument.
4
Introduce the notion of just-identi…ed and over-identi…ed systems.
5
De…ne the IV estimator and its asymptotic variance.
6
De…ne the 2SLS estimator and its asymptotic variance.
7
De…ne the notion of weak instrument.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
68 / 209
3.1 Reminder on IV and 2SLS
Consider the (population) multiple linear regression model:
y = Xβ + ε
y is a N
1 vector of observations yj for j = 1, .., N
X is a N K matrix of K explicative variables xjk for k = 1, ., K and
j = 1, .., N
β = ( β1 ..βK )0 is a K
ε is a N
1 vector of parameters
1 vector of error terms εi with (spherical disturbances)
V ( ε j X ) = σ 2 IN
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
69 / 209
3.1 Reminder on IV and 2SLS
Endogeneity we assume that the assumption A3 (exogeneity) is violated:
E ( εj X) 6= 0N
with
plim
C. Hurlin (University of Orléans)
1
1 0
X ε = E (xj εj ) = γ 6= 0K
N
Advanced Econometrics II
1
April 2018
70 / 209
3.1 Reminder on IV and 2SLS
Theorem (Bias of the OLS estimator)
If the regressors are endogenous, i.e. E ( εj X) 6= 0, the OLS estimator of
β is biased
b
E β
OLS 6 = β
where β denotes the true value of the parameters. This bias is called the
endogeneity bias.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
71 / 209
3.1 Reminder on IV and 2SLS
Theorem (Inconsistency of the OLS estimator)
1 X0 ε
If the regressors are endogenous with plim N
estimator of β is inconsistent
where Q = plim N
C. Hurlin (University of Orléans)
b
plim β
OLS = β + Q
1
= γ, the OLS
γ
1 X0 X.
Advanced Econometrics II
April 2018
72 / 209
3.1 Reminder on IV and 2SLS
Proof: Given the de…nition of the OLS estimator:
b
β
OLS
=
X0 X
1
X0 y
=
X0 X
1
X0 (Xβ + ε)
= β + X0 X
1
X0 ε
We have:
b
plim β
OLS
C. Hurlin (University of Orléans)
= β + plim
= β+Q
1
1 0
XX
N
1
plim
1 0
Xε
N
γ 6= β
Advanced Econometrics II
April 2018
73 / 209
3.1 Reminder on IV and 2SLS
Remarks
1
2
b
plim β
OLS = β + Q
1
γ
The implication is that even though only one of the variables in X is
b
correlated with ε, all of the elements of β
OLS are inconsistent,
not just the estimator of the coe¢ cient on the endogenous variable.
This e¤ects is called smearing e¤ect: the inconsistency due to the
endogeneity of the one variable is smeared across all of the least
squares estimators.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
74 / 209
3.1 Reminder on IV and 2SLS
Example (Endogeneity, OLS estimator and smearing)
Consider the multiple linear regression model
yi = 0.4 + 0.5xi 1
0.8xi 2 + εi
where εi is i.i.d. with E (εi ) . We assume that the vector of variables
de…ned by wi = (xi 1 : xi 2 : εi ) has a multivariate normal distribution with
wi
with
N (03
1 , ∆)
0
1
1 0.3 0
∆ = @ 0.3 1 0.5 A
0 0.5 1
It means that Cov (εi , xi 1 ) = 0 (x1 is exogenous) but Cov (εi , xi 2 ) = 0.5
(x2 is endogenous) and Cov (xi 1, xi 2 ) = 0.3 (x1 is correlated to x2 ).
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
75 / 209
3.1 Reminder on IV and 2SLS
Example (Endogeneity, OLS estimator and smearing (cont’d))
Write a Matlab code to (1) generate S = 1, 000 samples fyi , xi 1 , xi 2 gN
i =1
of size N = 10, 000. (2) For each simulated sample, determine the OLS
estimators of the model
yi = β1 + β2 xi 1 + β3 xi 2 + εi
b = b
Denote β
β1s b
β2s b
β3s
s
0
the OLS estimates obtained from the
simulation s 2 f1, ..S g . (3) compare the true value of the parameters in
the population (DGP) to the average OLS estimates obtained for the S
simulations
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
76 / 209
3.1 Reminder on IV and 2SLS
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
77 / 209
3.1 Reminder on IV and 2SLS
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
78 / 209
3.1 Reminder on IV and 2SLS
Question: What is the solution to the endogeneity issue?
The use of instruments..
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
79 / 209
3.1 Reminder on IV and 2SLS
De…nition (Instruments)
Consider a set of H variables zh 2 RN for h = 1, ..N. Denote Z the N
matrix (z1 : .. : zH ) . These variables are called instruments or
instrumental variables if they satisfy two properties:
H
(1) Exogeneity: They are uncorrelated with the disturbance.
E ( εj Z) = 0N
1
(2) Relevance: They are correlated with the independent variables, X.
E (xjk zjh ) 6= 0
for h 2 f1, .., H g and k 2 f1, .., K g.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
80 / 209
3.1 Reminder on IV and 2SLS
Assumptions: The instrumental variables satisfy the following properties.
Well behaved data:
plim
1 0
Z Z = QZZ a …nite H
N
H positive de…nite matrix
1 0
Z X = QZX a …nite H
N
K positive de…nite matrix
Relevance:
plim
Exogeneity:
plim
C. Hurlin (University of Orléans)
1 0
Z ε = 0K
N
Advanced Econometrics II
1
April 2018
81 / 209
3.1 Reminder on IV and 2SLS
De…nition (Instrument properties)
We assume that the H instruments are linearly independent:
E Z0 Z
is non singular
or equivalently
rank E Z0 Z
C. Hurlin (University of Orléans)
=H
Advanced Econometrics II
April 2018
82 / 209
3.1 Reminder on IV and 2SLS
The exogeneity condition
E ( εj j zj ) = 0 =) E (εj zj ) = 0H
can expressed as an orthogonality condition or moment condition
0
1
E @ zj
(H ,1 )
yj
xj0 β A = 0H
(1,1 )
(H ,1 )
So, we have H equations and K unknown parameters β
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
83 / 209
3.1 Reminder on IV and 2SLS
De…nition (Identi…cation)
The system is identi…ed if there exists a unique vector β such that:
E zj yj
xj0 β
=0
where zj = (zj 1 ..zjH )0 . For that, we have the following conditions:
(1) If H < K the model is not identi…ed.
(2) If H = K the model is just-identi…ed.
(3) If H > K the model is over-identi…ed.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
84 / 209
3.1 Reminder on IV and 2SLS
Remark
1
Under-identi…cation: less equations (H) than unknowns (K )....
2
Just-identi…cation: number of equations equals the number of
unknowns (unique solution)...=> IV estimator
3
Over-identi…cation: more equations than unknowns. Two equivalent
solutions:
1
Select K linear combinations of the instruments to have a unique
solution )...=> Two-Stage Least Squares (2SLS)
2
Set the sample analog of the moment conditions as close as possible to
zero, i.e. minimize the distance between the sample analog and zero
given a metric (optimal metric or optimal weighting matrix?) =>
Generalized Method of Moments (GMM).
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
85 / 209
3.1 Reminder on IV and 2SLS
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
86 / 209
3.1 Reminder on IV and 2SLS
Assumption: Consider a just-identi…ed model
H=K
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
87 / 209
3.1 Reminder on IV and 2SLS
Motivation of the IV estimator
By de…nition of the instruments:
plim
1
1 0
Z ε = plim Z0 (y
N
N
Xβ) = 0K
1
So, we have:
plim
1 0
Zy=
N
plim
1 0
ZX
N
β
or equivalently
β=
C. Hurlin (University of Orléans)
plim
1 0
ZX
N
1
plim
Advanced Econometrics II
1 0
Zy
N
April 2018
88 / 209
3.1 Reminder on IV and 2SLS
De…nition (Instrumental Variable (IV) estimator)
b of parameters
If H = K , the Instrumental Variable (IV) estimator β
IV
β is de…ned as to be:
b = Z0 X 1 Z0 y
β
IV
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
89 / 209
3.1 Reminder on IV and 2SLS
De…nition (Consistency)
b is
Under the assumption that plim N 1 Z0 ε = 0, the IV estimator β
IV
consistent:
p
b !
β
β
IV
where β denotes the true value of the parameters.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
90 / 209
3.1 Reminder on IV and 2SLS
Proof: By de…nition:
b = Z0 X
β
IV
1
Z0 y = β +
1 0
ZX
N
1
1 0
Zε
N
So, we have:
b = β + plim
plim β
IV
1 0
ZX
N
1
plim
1 0
Zε
N
Under the assumption of exogeneity of the instruments
plim
1 0
Z ε = 0K
N
1
So, we have
C. Hurlin (University of Orléans)
b =β
plim β
IV
Advanced Econometrics II
April 2018
91 / 209
3.1 Reminder on IV and 2SLS
De…nition (Asymptotic distribution)
b is asymptotically
Under some regularity conditions, the IV estimator β
IV
normally distributed:
p
where
b
N β
IV
QZZ = plim
K K
C. Hurlin (University of Orléans)
d
β ! N 0K
1 0
ZZ
N
1, σ
2
QZX1 QZZ QZX1
QZX = plim
K K
Advanced Econometrics II
1 0
ZX
N
April 2018
92 / 209
3.1 Reminder on IV and 2SLS
De…nition (Asymptotic variance covariance matrix)
b is
The asymptotic variance covariance matrix of the IV estimator β
IV
de…ned as to be:
b
Vasy β
IV
=
σ2
Q 1 QZZ QZX1
N ZX
A consistent estimator is given by
b
b asy β
V
IV
C. Hurlin (University of Orléans)
b 2 Z0 X
=σ
1
Z0 Z
Advanced Econometrics II
X0 Z
1
April 2018
93 / 209
3.1 Reminder on IV and 2SLS
Remarks
1
If the system is just identi…ed H = K ,
Z0 X
1
= X0 Z
1
QZX = QXZ
the estimator can also written as
2
b 2 Z0 X
=σ
1
b
ε0b
ε
1
=
N K
N K
N
b
b asy β
V
IV
Z0 Z
Z0 X
1
As usual, the estimator of the variance of the error terms is:
b2 =
σ
C. Hurlin (University of Orléans)
∑
i =1
Advanced Econometrics II
yi
b
xi0 β
IV
2
April 2018
94 / 209
3.1 Reminder on IV and 2SLS
Relevant instruments
1
2
Our analysis thus far has focused on the “identi…cation” condition
for IV estimation, that is, the “exogeneity assumption,” which
produces
1
plim Z0 ε = 0K 1
N
A growing literature has argued that greater attention needs to be
given to the relevance condition
plim
1 0
Z X = QZX a …nite H
N
K positive de…nite matrix
with H = K in the case of a just-identi…ed model.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
95 / 209
3.1 Reminder on IV and 2SLS
Relevant instruments (cont’d)
plim
1 0
Z X = QZX a …nite H
N
K positive de…nite matrix
1
While strictly speaking, this condition is su¢ cient to determine the
asymptotic properties of the IV estimator
2
However, the common case of “weak instruments,” is only barely
true has attracted considerable scrutiny.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
96 / 209
3.1 Reminder on IV and 2SLS
De…nition (Weak instrument)
A weak instrument is an instrumental variable which is only slightly
correlated with the right-hand-side variables X. In presence of weak
instruments, the quantity QZX is close to zero and we have
1 0
Z X ' 0H
N
C. Hurlin (University of Orléans)
K
Advanced Econometrics II
April 2018
97 / 209
3.1 Reminder on IV and 2SLS
Fact (IV estimator and weak instruments)
b has a poor
In presence of weak instruments, the IV estimators β
IV
precision (great variance). For QZX ' 0H K , the asymptotic variance
tends to be very large, since:
b
Vasy β
IV
=
σ2
Q 1 QZZ QZX1
N ZX
As soon as N 1 Z0 X ' 0H K , the estimated asymptotic variance
covariance is also very large since
b
b asy β
V
IV
C. Hurlin (University of Orléans)
b 2 Z0 X
=σ
1
Z0 Z
Advanced Econometrics II
X0 Z
1
April 2018
98 / 209
3.1 Reminder on IV and 2SLS
Assumption: Consider an over-identi…ed model
H>K
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
99 / 209
3.1 Reminder on IV and 2SLS
Introduction
If Z contains more variables than X, then much of the preceding derivation
is unusable, because Z0 X will be H K with
rank Z0 X = K < H
So, the matrix Z0 X has no inverse and we cannot compute the IV
estimator as:
b = Z0 X 1 Z0 y
β
IV
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
100 / 209
3.1 Reminder on IV and 2SLS
Introduction (cont’d)
The crucial assumption in the previous section was the exogeneity
assumption
1
plim Z0 ε = 0K 1
N
1
That is, every column of Z is asymptotically uncorrelated with ε.
2
That also means that every linear combination of the columns of Z
is also uncorrelated with ε, which suggests that one approach would
be to choose K linear combinations of the columns of Z.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
101 / 209
3.1 Reminder on IV and 2SLS
Introduction (cont’d)
Which linear combination to choose?
A choice consists in using is the projection of the columns of X in the
column space of Z:
b = Z Z0 Z 1 Z0 X
X
b for Z, we have
With this choice of instrumental variables, X
b
β
2SLS
=
=
C. Hurlin (University of Orléans)
b 0X
X
1
b 0y
X
X0 Z Z0 Z
1
Z0 X
Advanced Econometrics II
1
X0 Z Z0 Z
1
Z0 y
April 2018
102 / 209
3.1 Reminder on IV and 2SLS
De…nition (Two-stage Least Squares (2SLS) estimator)
The Two-stage Least Squares (2SLS) estimator of the parameters β is
de…ned as to be:
1 0
b
b0
by
β
X
2SLS = X X
1
b = Z Z0 Z
where X
Z0 X corresponds to the projection of the columns of
X in the column space of Z, or equivalently by
0
0
b
β
2SLS = X Z Z Z
C. Hurlin (University of Orléans)
1
Z0 X
1
Advanced Econometrics II
X0 Z Z0 Z
1
Z0 y
April 2018
103 / 209
3.1 Reminder on IV and 2SLS
Remark
By de…nition
Since
1
b
b0
β
2SLS = X X
b = Z Z0 Z
X
1
b 0y
X
Z0 X = PZ X
where PZ denotes the projection matrix on the columns of Z. Reminder:
PZ is symmetric and PZ PZ0 = PZ . So, we have
b
β
2SLS
C. Hurlin (University of Orléans)
1
0
=
X0 PZ X
=
X0 PZ PZ X
=
b 0X
b
X
0
1
b 0y
X
b 0y
X
Advanced Econometrics II
1
b 0y
X
April 2018
104 / 209
3.1 Reminder on IV and 2SLS
De…nition (Two-stage Least Squares (2SLS) estimator)
The Two-stage Least Squares (2SLS) estimator of the parameters β
can also be de…ned as:
b
b0 b
β
2SLS = X X
1
b 0y
X
b
It corresponds to the OLS estimator obtained in the regression of y on X.
b
Then, the 2SLS can be computed in two steps, …rst by computing X, then
by the least squares regression. That is why it is called the two-stage LS
estimator.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
105 / 209
3.1 Reminder on IV and 2SLS
A procedure to get the 2SLS estimator is the following
Step 1: Regress each explicative variable xk (for k = 1, ..K ) on the H
instruments.
xkj = α1 z1j + α2 z2j + .. + αH zHj + vj
Step 2: Compute the OLS estimators b
αh and the …tted values b
xkj
b
xkj = b
α1 z1j + b
α2 z2j + .. + b
αH zHj
Step 3: Regress the dependent variable y on the …tted values b
xki :
yj = β1 b
x1j + β2 b
x2j + .. + βK b
xKj + εj
b
The 2SLS estimator β
2SLS then corresponds to the OLS estimator
obtained in this model.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
106 / 209
3.1 Reminder on IV and 2SLS
Theorem
If any column of X also appears in Z, i.e. if one or more explanatory
(exogenous) variable is used as an instrument, then that column of X is
b
reproduced exactly in X.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
107 / 209
3.1 Reminder on IV and 2SLS
Example (Explicative variables used as instrument)
Suppose that the regression contains K variables, only one of which, say,
the K th , is correlated with the disturbances, i.e. E (xKi εi ) 6= 0. We can
use a set of instrumental variables z1 ,..., zJ plus the other K 1 variables
that certainly qualify as instrumental variables in their own right. So,
Z = (z1 : .. : zJ : x1 : .. : xK
1)
Then
b = (x1 : .. : xK
X
1
:b
xK )
where b
xK denotes the projection of xK on the columns of Z.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
108 / 209
3.1 Reminder on IV and 2SLS
Key Concepts SubSection 3.1
1
Endogeneity bias and smearing e¤ect.
2
Instrument or instrumental variable.
3
Exogeneity and relavance properties of an instrument.
4
Instrumental Variable (IV) estimator.
5
Two-Stage Least Square (2SLS) estimator.
6
Weak instrument.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
109 / 209
Subsection 3.2
Anderson and Hsiao (1982) IV approach
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
110 / 209
3.2 Anderson and Hsiao (1982) IV approach
Objectives
1
Introduce the IV approach of Anderson and Hsiao (1982).
2
Describe their 4 steps estimation procedure.
3
Introduce the …rst di¤erence transformation of the dynamic model.
4
Describe their choice of instruments.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
111 / 209
3.2 Anderson and Hsiao (1982) IV approach
Consider a dynamic panel data model with random individual e¤ects:
yit = γyi ,t
1
0
0
+ β xit + ρ ω i + αi + εit
αi are the (unobserved) individual e¤ects,
xit is a vector of K1 time-varying explanatory variables,
ω i is a vector of K2 time-invariant variables.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
112 / 209
3.2 Anderson and Hsiao (1982) IV approach
Assumption: we assume that the component error term vit = εit + αi
E (εit ) = 0, E (αi ) = 0
E (εit εjs ) = σ2ε if j = i and t = s, 0 otherwise.
E (αi αj ) = σ2α if j = i, 0 otherwise.
E (αi xit ) = 0, E (αi ω i ) = 0 (exogeneity assumption for ω i )
E (εit xit ) = 0, E (εit ω i ) = 0 (exogeneity assumption for xit )
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
113 / 209
3.2 Anderson and Hsiao (1982) IV approach
The K1 + K2 + 3 parameters to estimate are
yit = γyi ,t
1
0
0
+ β xit + ρ ω i + αi + εit
1
γ the autoregressive parameter,
2
β is the K1
variables,
1 vector of parameters for the time-varying explanatory
3
ρ is the K2
1 vector of parameters for the time-invariant variables,
4
σ2ε and σ2α the variances of the error terms.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
114 / 209
3.2 Anderson and Hsiao (1982) IV approach
Remark
If the vector ω i includes a constant term, the associated parameter can be
interpreted as the mean of the (random) individual e¤ects
yit = γyi ,t
1
0
αi = µ + αi
0
1
1
B zi 2 C
C
ωi = B
@ ... A
(K 2 ,1 )
ziK 2
C. Hurlin (University of Orléans)
0
+ β xit + ρ ω i + αi + εit
E ( αi ) = 0
0
1
µ
B ρ C
2 C
ρ =B
@ ... A
(K 2 ,1 )
ρK 2
Advanced Econometrics II
April 2018
115 / 209
3.2 Anderson and Hsiao (1982) IV approach
Vectorial form:
yi = yi ,
εi , yi and yi ,
Xi a T
1
are T
1γ
0
+ Xi β + ω i ρe + αi e + εi
1 vectors (T is the adjusted sample size),
K1 matrix of time-varying explanatory variables,
ω i is a K2
1 vector of time-invariant variables,
e is the T
1 unit vector, and
0
E (αi ) = 0 E αi xit
C. Hurlin (University of Orléans)
0
= 0 E αi ω i = 0
Advanced Econometrics II
April 2018
116 / 209
3.2 Anderson and Hsiao (1982) IV approach
In the dynamic panel data models context:
The Instrumental Variable (IV) approach was …rst proposed by
Anderson and Hsiao (1982).
They propose an IV procedure with 2 choices of instruments and 4
steps to estimate γ, β, ρ and σ2ε .
Anderson, T.W., and C. Hsiao (1982). Formulation and Estimation of
Dynamic Models Using Panel Data, Journal of Econometrics, 18, 47–82.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
117 / 209
3.2 Anderson and Hsiao (1982) IV approach
The Anderson and Hsiao (1982) IV approach
1
First step: …rst di¤erence transformation
2
Second step: choice of instruments and IV estimation of γ and β
3
Third step: estimation of ρ
4
Fourth step: estimation of the variances σ2α and σ2ε
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
118 / 209
3.2 Anderson and Hsiao (1982) IV approach
The Anderson and Hsiao (1982) IV approach
1
First step: …rst di¤erence transformation
2
Second step: choice of instruments and IV estimation of γ and β
3
Third step: estimation of ρ
4
Fourth step: estimation of the variances σ2α and σ2ε
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
119 / 209
3.2 Anderson and Hsiao (1982) IV approach
First step: …rst di¤erence transformation
Taking the …rst di¤erence of the model, we obtain for t = 2, .., T .
(yit
yi ,t
1)
= γ (yi ,t
1
yi ,t
2) +
0
β (xit
xi ,t
1 ) + εit
εi ,t
1
The …rst di¤erence transformation leads to "lost" one observation.
But, it allows to eliminate the individual e¤ects (as the Within
transformation).
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
120 / 209
3.2 Anderson and Hsiao (1982) IV approach
The Anderson and Hsiao (1982) IV approach
1
First step: …rst di¤erence transformation
2
Second step: choice of instruments and IV estimation of γ and β
3
Third step: estimation of ρ
4
Fourth step: estimation of the variances σ2α and σ2ε
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
121 / 209
3.2 Anderson and Hsiao (1982) IV approach
Second step: choice of the instruments and IV estimation
(yit
yi ,t
1)
= γ (yi ,t
yi ,t
1
2) +
0
β (xit
xi ,t
1 ) + εit
εi ,t
1
A valid instrument zit should satisfy
E (zit (εit
E (zit (yi ,t
C. Hurlin (University of Orléans)
εi ,t
1
1 ))
yi ,t
= 0 Exogeneity property
2 ))
6= 0 Relevance property
Advanced Econometrics II
April 2018
122 / 209
3.2 Anderson and Hsiao (1982) IV approach
Anderson and Hsiao (1982) propose two valid instruments:
1
First instrument: zi ,t = yi ,t
E (yi ,t
E (yi ,t
2
2
2
(εit
(yi ,t
εi ,t
1
2
1 ))
yi ,t
E ((yi ,t
2
2
C. Hurlin (University of Orléans)
yi ,t
yi ,t
3 ) ( εit
3 ) (yi ,t 1
6= 0 Relevance property
2 ))
Second instrument: zi ,t = (yi ,t
E ((yi ,t
= 0 Exogeneity property
εi ,t
3)
2
yi ,t
1 ))
= 0 Exogeneity property
yi ,t
2 ))
Advanced Econometrics II
6= 0 Relevance property
April 2018
123 / 209
3.2 Anderson and Hsiao (1982) IV approach
Remarks
The initial …rst di¤erences model includes K1 + 1 regressors.
The regressor (yi ,t
The regressors (xit
C. Hurlin (University of Orléans)
1
yi ,t
xi ,t
1)
2)
is endogeneous.
are assumed to be exogeneous.
Advanced Econometrics II
April 2018
124 / 209
3.2 Anderson and Hsiao (1982) IV approach
De…nition (Instruments)
Anderson and Hsiao (1982) consider two sets of K1 + 1 instruments, in
both cases the system is just identi…ed (IV estimator):
zi
(K 1 +1,1 )
zi
(K 1 +1,1 )
C. Hurlin (University of Orléans)
=
=
(yi ,t
yi ,t
2
(1,1 )
: (xit
yi ,t 3 )
2
(1,1 )
xi ,t
(1,K 1 )
: (xit
Advanced Econometrics II
1)
0
!0
xi ,t 1 )
(1,K 1 )
0
!0
April 2018
125 / 209
3.2 Anderson and Hsiao (1982) IV approach
IV estimator with the …rst set of instruments
b IV
γ
b
βIV
n
= Z0 X
T
(yi ,t
(xit
∑∑
i =1 t =2
n
T
∑∑
i =1 t =2
xit
C. Hurlin (University of Orléans)
1
1
Z0 y =
2 ) yi ,t 2
yi ,t
xi ,t
yi ,t 2
xi ,t
1 ) yi ,t 2
1
(yi ,t
0
yi ,t 2 (xit xi ,t 1 )
(xit xi ,t 1 ) (xit xi ,t
!
yi ,t
1)
0
!!
1
1)
Advanced Econometrics II
April 2018
126 / 209
3.2 Anderson and Hsiao (1982) IV approach
IV estimator with the second set of instruments
b IV
γ
b
βIV
n
1
= Z0 X
T
(yi ,t
(xit
∑∑
i =1 t =3
n
T
∑∑
i =1 t =3
1
yi ,t
xit
C. Hurlin (University of Orléans)
Z0 y =
yi ,t
xi ,t
2
2 ) (yi ,t 2
1 ) (yi ,t 2
yi ,t 3
xi ,t 1
yi ,t
yi ,t
(yi ,t
3)
3)
yi ,t
Advanced Econometrics II
(yi ,t
(xit
!
2
yi ,t
xi ,t
3 ) (xit
1 ) (xit
xi ,t
xi ,t
1
1)
1)
April 2018
127 / 209
0
3. Instrumental variable (IV) estimators
Remarks
1
The …rst estimator (with zit = yi ,t 2 ) has an advantage over the
second one (with zit = yi ,t 2 yi ,t 3 ), in that the minimum number
of time periods required is two, whereas the …rst one requires T
3.
2
In practice, if T
3, the choice between both depends on the
correlations between (yi ,t 1 yi ,t 2 ) and yi ,t 2 or (yi ,t 2 yi ,t
=> relevance assumption.
3)
Anderson, T.W., and C. Hsiao (1981). Estimation of Dynamic Models with
Error Components, Journal of the American Statistical Association, 76,
598–606
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
128 / 209
3.2 Anderson and Hsiao (1982) IV approach
The Anderson and Hsiao (1982) IV approach
1
First step: …rst di¤erence transformation
2
Second step: choice of instruments and IV estimation of γ and β
3
Third step: estimation of ρ
4
Fourth step: estimation of the variances σ2α and σ2ε
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
129 / 209
3.2 Anderson and Hsiao (1982) IV approach
Third step
yit = γyi ,t
1
0
0
+ β xit + ρi ω i + αi + εit
b IV and b
Given the estimates γ
βIV , we can deduce an estimate of ρ,
the vector of parameters for the time-invariant variables ω i .
Let us consider, the following equation
yi
b IV y i ,
γ
with vi = αi + εi .
1
0
b
βIV x i = ρ0 ω i + vi
i = 1, ..., n
The parameters vector ρ can simply be estimated by OLS.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
130 / 209
3.2 Anderson and Hsiao (1982) IV approach
De…nition (parameters of time-invariant variables)
A consistent estimator of the parameters ρ is given by
n
b
ρ
=
(K 2 ,1 )
with hi = y i
b IV y i ,
γ
C. Hurlin (University of Orléans)
1
∑ ωi ωi0
i =1
!
1
n
∑ ωi hi
i =1
!
0
b
βIV x i .
Advanced Econometrics II
April 2018
131 / 209
3.2 Anderson and Hsiao (1982) IV approach
The Anderson and Hsiao (1982) IV approach
1
First step: …rst di¤erence transformation
2
Second step: choice of instruments and IV estimation of γ and β
3
Third step: estimation of ρ
4
Fourth step: estimation of the variances σ2α and σ2ε
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
132 / 209
3.2 Anderson and Hsiao (1982) IV approach
Fourth step: estimation of the variances
De…nition
b IV , b
Given γ
βIV , and b
ρ, we can estimate the variances as follows:
with
b2α =
σ
bεit = (yi ,t
b2ε =
σ
1 n
yi
n i∑
=1
yi ,t
C. Hurlin (University of Orléans)
1)
T n
1
∑ bε2it
n (T 1) t∑
=2 i =1
b IV y i ,
γ
b IV (yi ,t
γ
0
1
1
b
βIV x i
yi ,t
Advanced Econometrics II
2
b
ρ0 zi
2)
0
b
βIV (xi ,t
1 2
b
σ
T ε
xi ,t
1)
April 2018
133 / 209
3.2 Anderson and Hsiao (1982) IV approach
Theorem
The instrumental-variable estimators of γ, β, and σ2ε are consistent when
n (correction of the Nickell bias), or T , or both tend to in…nity.
b IV = γ
plim γ
n,T !∞
plim b
βIV = β
n,T !∞
b2ε = σ2ε
plim σ
n,T !∞
The estimators of ρ and σ2α are consistent only when n goes to in…nity.
plim b
ρ=ρ
n !∞
C. Hurlin (University of Orléans)
b2α = σ2α
plim σ
n !∞
Advanced Econometrics II
April 2018
134 / 209
3.2 Anderson and Hsiao (1982) IV approach
Key Concepts SubSection 3.2
1
Anderson and Hsiao (1982) IV approach.
2
The 4 steps of the estimation procedure.
3
First di¤erence transformation of the dynamic panel model.
4
Tow choices of instrument.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
135 / 209
Section 4
Generalized Method of Moment (GMM)
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
136 / 209
4. The GMM approach
Let us consider the same dynamic panel data model as in section 3:
yit = γyi ,t
1
0
0
+ β xit + ρ ω i + αi + εit
αi are the (unobserved) individual e¤ects,
xit is a vector of K1 time-varying explanatory variables,
ω i is a vector of K2 time-invariant variables.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
137 / 209
4. The GMM approach
Assumptions: we assume that the component error term vit = εit + αi
E (εit ) = 0, E (αi ) = 0
E (εit εjs ) = σ2ε if j = i and t = s, 0 otherwise.
E (αi αj ) = σ2α if j = i, 0 otherwise.
E (αi xit ) = 0, E (αi ω i ) = 0 (exogeneity assumption for ω i )
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
138 / 209
4. The GMM approach
De…nition (First di¤erence model)
The GMM estimation method is based on a model in …rst di¤erences, in
order to swip out the individual e¤ects αi and th variables ω i :
(yit
yi ,t
1)
= γ (yi ,t
1
yi ,t
2) +
0
β (xit
xi ,t
1 ) + εit
εi ,t
1
for t = 2, .., T .
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
139 / 209
4. The GMM approach
Intuition of the moment conditions
Notice that yi ,t 2 and (yi ,t 2 yi ,t
instruments for (yi ,t 1 yi ,t 2 ).
All the lagged variables yi ,t
E (yi ,t
E (yi ,t
2 j
2 j
(εi ,t
(yi ,t
εi ,t
1
2 j,
1 ))
yi ,t
3)
are not the only valid
for j
0, satisfy
= 0 Exogeneity property
2 ))
6= 0 Relevance property
Therefore, they all are legitimate instruments for (yi ,t
C. Hurlin (University of Orléans)
Advanced Econometrics II
1
yi ,t
April 2018
2 ).
140 / 209
4. The GMM approach
Intuition of the moment conditions
The m + 1 conditions
E (yi ,t
2 j
(εi ,t
εi ,t
1 ))
= 0 for j = 0, 1, .., m
can be used as moment conditions in order to estimate
θ = β, γ, ρ, σ2α , σ2ε
Arellano, M., and S. Bond (1991). “Some Tests of Speci…cation for Panel
Data: Monte Carlo Evidence and an Application to Employment Equations,”
Review of Economic Studies, 58, 277–297.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
141 / 209
4. The GMM approach
Remark: The moment conditions
E (yi ,t
2 j
(εi ,t
εi ,t
1 ))
= 0 for j = 0, 1, .., m
mean that there exists a vector of parameters (true value)
0
0
0
θ 0 = β0 , γ0 , ρ0 , σ2α0 , σ2ε0
such that
E yi ,t
where ∆ = (1
2 j
∆yit
γ0 ∆yi ,t
1
0
β0 ∆xit
=0
L) and L denotes the lag operator .
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
142 / 209
4. The GMM approach
We consider two alternative assumptions on the explanatory variables xit
1
The explanatory variables xit are strictly exogeneous.
2
The explanatory variables xit are pre-determined.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
143 / 209
4. The GMM approach
We consider two alternative assumptions on the explanatory variables xit
1
The explanatory variables xit are strictly exogeneous.
2
The explanatory variables xit are pre-determined.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
144 / 209
4. The GMM approach
Assumption: exogeneity
We assume that the time varying explanatory variables xit are strictly
exogeneous in the sense that:
0
E xit εis
C. Hurlin (University of Orléans)
= 0 8 (t, s )
Advanced Econometrics II
April 2018
145 / 209
4. The GMM approach
De…nition (moment conditions)
For each period, we have the following orthogonal conditions
E (qit ∆εit ) = 0,
t = 2, .., T
= yi 0 , yi 1 , .., yi ,t
qit
(t 1 +TK 1 ,1 )
0
0
0
where xi = xi 1 , .., xiT , ∆ = (1
C. Hurlin (University of Orléans)
0
2 , xi
0
L) and L denotes the lag operator
Advanced Econometrics II
April 2018
146 / 209
4. The GMM approach
Example (moment conditions)
0
The condition E (qit ∆εit ) = 0, qit = (yi 0 , yi 1 , .., yi ,t 2 , xi0 ) at time t = 2
becomes
!
yi 0
E
qi 2 ∆εi 2 = E
0
( εi 2 εi 1 ) =
xi0
(1 +TK 1 ,1 )
(1 +TK 1 ,1 ) (1,1 )
0
0
0
where xi = xi 1 , .., xiT . At time t = 3, we have
E
qi 3 ∆εi 3
(2 +TK 1 ,1 ) (1,1 )
C. Hurlin (University of Orléans)
!
00
1
yi 0
= E @ @ yi 1 A ( ε i 3
xi0
Advanced Econometrics II
1
εi 2 ) A =
0
(2 +TK 1 ,1 )
April 2018
147 / 209
4. The GMM approach
Under the exogeneity assumption, what is the number of moment
conditions?
E (qit ∆εit ) = 0, t = 2, .., T
Time
Number of moment conditions
t=2
1 + TK1
t=3
2 + TK1
...
...
t=T
total
C. Hurlin (University of Orléans)
T
T (T
1 + TK1
1) (K1 + 1/2)
Advanced Econometrics II
April 2018
148 / 209
4. The GMM approach
Proof: the total number of moment conditions is equal to
r
= 1 + TK1 + 2 + TK1 .. + TK1 + (T 1)
= T (T 1) K1 + 1 + 2 + .. + (T 1)
T (T 1)
= T ( T 1 ) K1 +
2
1
= T ( T 1 ) K1 +
2
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
149 / 209
4. The GMM approach
Stacking the T
∆yi
(T 1,1 )
1 …rst-di¤erenced equations in matrix form, we have
= ∆yi ,
β + ∆εi
1 γ + ∆Xi
(T 1,K 1 )(K 1 ,1 )
(T 1,1 )
(T 1,1 )(1,1 )
i = 1, .., N
where :
∆yi
(T 1,1 )
0
B
=B
@
yi 2
yi 3
yiT
C. Hurlin (University of Orléans)
1
yi 1
yi 2
..
yi ,T
C
C ∆yi ,
A
(T
1
1
1,1 )
0
B
=B
@
Advanced Econometrics II
yi 1
yi 2
1
yi 0
yi 1
..
yiT
1
yi ,T
2
C
C
A
April 2018
150 / 209
4. The GMM approach
Stacking the T
∆yi
(T 1,1 )
1 …rst-di¤erenced equations in matrix form, we have
= ∆yi ,
β + ∆εi
1 γ + ∆Xi
(T 1,K 1 )(K 1 ,1 )
(T 1,1 )
(T 1,1 )(1,1 )
i = 1, .., N
where :
∆Xi
(T 1,K 1 )
0
B
=B
@
C. Hurlin (University of Orléans)
xi 2
xi 3
xiT
1
xi 1
xi 2
..
xi ,T
1
C
C
A
∆εi
(T 1,1 )
Advanced Econometrics II
0
B
=B
@
εi 2
εi 3
εiT
1
εi 1
εi 2
..
εi ,T
1
C
C
A
April 2018
151 / 209
4. The GMM approach
De…nition (moment conditions)
The conditions E (qit ∆εit ) = 0 for t = 2, .., T , can be written as
E
0
B
B
B
Wi = B
B
B
@
where r = T (T
Wi
∆εi
(r ,T 1 )(T 1,1 )
qi 2
0
!
= 0
(m,1 )
...
0
(1 +TK 1 ,1 )
0
qi 3
(2 +TK 1 ,1 )
0
..
..
qiT
(T 1 +TK 1 ,1 )
1
C
C
C
C
C
C
A
1) (K1 + 1/2) is the number of moment conditions.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
152 / 209
4. The GMM approach
Example (moment conditions, vectorial form)
At time t = 2, we have
E (qi 2 ∆εi 2 ) = E
yi 0
xi0
( εi 2
εi 1 )
=0
In a vectorial form we have the …rst set of 1 + TK1 moment conditions
0
0
11
εi 2 εi 1
B
CC
qi 2
0 ... 0 B
B εi 3 εi 2 C C = 0
E (Wi ∆εi ) = E B
@ (1 +TK 1 ,1 )
@
AA
..
εiT εi ,T 1
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
153 / 209
4. The GMM approach
Example (moment conditions, vectorial form)
At time t = 3, we have
1
yi 0
E (qi 3 ∆εi 3 ) = E @@ yi 1 A (εi 3
xi0
00
1
εi 2 ) A = 0
In a vectorial form we have the second set of 2 + TK1 moment conditions
0
0
11
εi 2 εi 1
B 0
CC
qi 3
... 0 B
B εi 3 εi 2 C C = 0
E (Wi ∆εi ) = E B
@
@
AA
(2 +TK 1 ,1 )
..
εiT εi ,T 1
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
154 / 209
4. The GMM approach
Example
For T = 10 et K1 = 0 (without explicative variable), we have
r=
T (T
2
1)
= 45 orthogonal conditions
Example
For T = 50 et K1 = 0 (without explicative variable), we have
r=
T (T
2
C. Hurlin (University of Orléans)
1)
= 1225 orthogonal conditions !!
Advanced Econometrics II
April 2018
155 / 209
4. The GMM approach
Number of orthogonal conditions
5000
4500
4000
3500
3000
2500
2000
1500
1000
500
0
0
C. Hurlin (University of Orléans)
10
20
30
40
50
T
60
Advanced Econometrics II
70
80
90
100
April 2018
156 / 209
4. The GMM approach
We consider two alternative assumptions on the explanatory variables xit
1
The explanatory variables xit are strictly exogeneous.
2
The explanatory variables xit are pre-determined.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
157 / 209
4. The GMM approach
We consider two alternative assumptions on the explanatory variables xit
1
The explanatory variables xit are strictly exogeneous.
2
The explanatory variables xit are pre-determined.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
158 / 209
4. The GMM approach
Assumption: pre-determination
We assume that the time varying explanatory variables xit are
pre-determined in the sense that:
E xit0 εis = 0 if t
C. Hurlin (University of Orléans)
Advanced Econometrics II
s
April 2018
159 / 209
4. The GMM approach
In this case, we have
E (qit ∆εit ) = 0,
qit
(t 1 +tK 1 ,1 )
C. Hurlin (University of Orléans)
0
t = 2, .., T
B
= @yi 0 , yi 1 , .., yi ,t
10
C
0
0
2 , xi 1 , .., xi ,t 2 A
Advanced Econometrics II
| {z }
not T
April 2018
160 / 209
4. The GMM approach
De…nition
The conditions E (qit ∆εit ) = 0 for t = 2, .., T , can be written as
!
0
B
B
B
Wi = B
B
B
@
where r = T (T
E
Wi
∆εi
(r ,T 1 )(T 1,1 )
qi 2
0
= 0
(m,1 )
...
0
(1 +K 1 ,1 )
0
qi 3
(2 +2K 1 ,1 )
0
..
..
qiT
(T 1 +(T 1 )K 1 ,1 )
1
C
C
C
C
C
C
A
1) (K1 + 1) /2 is the number of moment conditions.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
161 / 209
4. The GMM approach
Proof: the total number of moment conditions is equal to
r
= 1 + K1 + 2 + K1 .. + (T 1) K1 + (T
= (1 + K 1) (1 + 2 + ... + (T 1))
T (T 1)
= ( 1 + K1 )
2
C. Hurlin (University of Orléans)
Advanced Econometrics II
1)
April 2018
162 / 209
4. The GMM approach
Number of orthogonal conditions (K1=1)
15000
10000
X exogeneous
X pre-determined
5000
0
0
C. Hurlin (University of Orléans)
10
20
30
40
50
T
60
Advanced Econometrics II
70
80
90
100
April 2018
163 / 209
4. The GMM approach
Fact
Whatever the assumption made on the explanatory variable, the number of
othogonal conditions (moments) r is much larger than the number of
parameters, e.g. K1 + 1. Thus, Arellano and Bond (1991) suggest a
generalized method of moments (GMM) estimator.
Arellano, M., and S. Bond (1991). “Some Tests of Speci…cation for Panel
Data: Monte Carlo Evidence and an Application to Employment Equations,”
Review of Economic Studies, 58, 277–297.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
164 / 209
4. The GMM approach
We will exploit the moment conditions
E (Wi ∆εi ) = 0
to estimate by GMM the parameters θ = γ, β0
∆yi = ∆yi ,
C. Hurlin (University of Orléans)
1γ
+ ∆Xi β + ∆εi
Advanced Econometrics II
0
in
i = 1, .., n
April 2018
165 / 209
Subsection 4.1
GMM: a general presentation
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
166 / 209
4.1 GMM: a general presentation
De…nition
The standard method of moments estimator consists of solving the
unknown parameter vector θ by equating the theoretical moments with
their empirical counterparts or estimates.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
167 / 209
4.1 GMM: a general presentation
1
Suppose that there exist relations m (yt ; θ ) such that
E (m (yt ; θ 0 )) = 0
where θ 0 is the true value of θ and m (yt ; θ 0 ) is a r
2
3
1 vector.
Let m
b (y , θ ) be the sample estimates of E (m (yt ; θ )) based on n
independent samples of yt
m
b (y , θ ) =
1 n
m (yt ; θ )
n t∑
=1
Then the method of moments consit in …nding b
θ, such that
m
b y,b
θ =0
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
168 / 209
4.1 GMM: a general presentation
Intuition of the GMM
Consider the moment conditions such that
E (m (yt ; θ 0 )) = 0
Under some regularity assumptions, 8θ 2 Θ
In particular
m
b (y , θ ) =
1 n
p
m (yt ; θ ) ! E (m (yt ; θ ))
∑
n t =1
p
m
b (y , θ 0 ) ! E (m (yt ; θ 0 )) = 0
So, the GMM consists in …nding b
θ such that
C. Hurlin (University of Orléans)
p
m
b y,b
θ = 0 =) b
θ ! θ0
Advanced Econometrics II
April 2018
169 / 209
4.1 GMM: a general presentation
Fact (just identi…ed system)
If the number r of equations (moments) is equal to the dimension a of θ, it
is in general possible to solve for b
θ uniquely. The system is just identi…ed.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
170 / 209
4.1 GMM: a general presentation
Example (classical method of moment)
Consider a random variable yt
t (v ). We want to estimate v from an
i.i.d. sample fy1 , ..yn g. We know that:
µ2 = E yt2 = V (yt ) =
v
v
2
If µ2 is known, then v can be identi…ed as:
v=
C. Hurlin (University of Orléans)
2E yt2
E (yt2 ) 1
Advanced Econometrics II
April 2018
171 / 209
4.1 GMM: a general presentation
Example (classical method of moment)
b2,T
Now let us consider the sample variance µ
b2 =
µ
1 n 2
yt
n t∑
=1
p
! µ2
So, a consistent estimate (classical method of moment) of v is de…ned by:
vb =
C. Hurlin (University of Orléans)
2b
µ2
b2
µ
1
Advanced Econometrics II
April 2018
172 / 209
4.1 GMM: a general presentation
Example (classical method of moment)
Another way to write the problem consists in de…ning
m (yt ; v ) = yt2
v
v
2
By de…nition, we have:
E (m (yt ; v )) = E yt2
C. Hurlin (University of Orléans)
v
v
Advanced Econometrics II
2
=0
April 2018
173 / 209
4.1 GMM: a general presentation
Example (classical method of moment)
The moment condition (r = 1) is
v
E (m (yt ; v )) = E yt2
v
2
=0
The empirical counterpart is
m
b (y ; v ) =
1 n
1 n
m (yt ; v ) = ∑ yt2
∑
n t =1
n i =1
v
v
2
So, the estimator vb of the classical method of moment is de…ned by:
m
b (y ; vb) = 0 ,
C. Hurlin (University of Orléans)
vb =
2b
µ2
b2
µ
p
1
Advanced Econometrics II
!v =
2E yt2
E (yt2 ) 1
April 2018
174 / 209
4.1 GMM: a general presentation
De…nition (over-identi…ed system)
If the number of moments r is greater than the dimension of θ, the system
of non linear equation m
b (y ; vb) = 0, in general, has no solution. The
system is over-identi…ed.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
175 / 209
4.1 GMM: a general presentation
If the system is over-identi…ed, it is then necessary to minimize some norm
b (y ; θ ) in order to …nd b
θ:
(or distance measure) of m
where S
1
q (y , θ ) = m
b (y ; θ ) 0 S
1
m
b (y ; θ )
is a positive de…nite (weighting) matrix.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
176 / 209
4.1 GMM: a general presentation
Example (weigthing matrix)
Consider a random variable yt
t (v ). We want to estimate v from an
i.i.d. sample fy1 , ..yn g. We know that:
µ2 = E yt2 =
µ4 = E yt4 =
(v
v
v
2
3v 2
2) (v
4)
The two moment conditions (r = 2) can be written as
!
yt2 v v 2
2
E (m (yt ; v )) = E
=
yt4 (v 23v)(v 4 )
C. Hurlin (University of Orléans)
Advanced Econometrics II
0
0
April 2018
177 / 209
4.1 GMM: a general presentation
Example (weigthing matrix)
It is impossible to …nd a unique value vb such that
1 n
m
b (y ; vb) = ∑ m (yt ; vb) =
n t =1
n
vb
1
2
n ∑t =1 yt
vb 2
n
3b
v2
1
2
n ∑t =1 yt
(vb 2 )(vb 4 )
!
=
0
0
So, we have to impose some weights to the two moment conditions
m
b (y ; v ) 0 S
C. Hurlin (University of Orléans)
1
m
b (y ; v )
Advanced Econometrics II
April 2018
178 / 209
4.1 GMM: a general presentation
Example (weigthing matrix)
Let us assume that
S
1
1 0
0 2
=
then we have
0
m
b (y ; v ) S
1
m
b (y ; v ) =
1 n 2
yt
n t∑
=1
+2
v
v
1 n 2
yt
n t∑
=1
It is now possible to …nd vb such that m
b (y ; v ) 0 S
C. Hurlin (University of Orléans)
2
Advanced Econometrics II
(v
1
!2
3v 2
2) (v
4)
!2
m
b (y ; v ) = 0
April 2018
179 / 209
4.1 GMM: a general presentation
De…nition (GMM estimator)
The GMM estimator b
θ minimizes the following criteria
b
θ = arg min q (y , θ ) = arg min m
b (y ; θ ) 0 S
θ 2 Ra
where S
1
(1,1 )
θ 2 Ra
is the optimal weighting matrix.
C. Hurlin (University of Orléans)
Advanced Econometrics II
(1,r )
1
(r ,r )
m
b (y ; θ )
(r ,1 )
April 2018
180 / 209
4.1 GMM: a general presentation
What is the optimal weigthing matrix?
b
θ = arg min q (y , θ ) = arg min m
b (y ; θ ) 0 S
θ 2 Ra
(1,1 )
θ 2 Ra
(1,r )
1
(r ,r )
m
b (y ; θ )
(r ,1 )
The optimal choice (if there is no autocorrelation of m (y ; θ 0 )) of S
turns out to be
!
S = E m (y ; θ 0 ) m (y ; θ 0 ) 0
(r ,r )
(r ,1 )
(1,r )
The matrix S corresponds to variance-covariance matrix of the vector
m (y ; θ 0 ).
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
181 / 209
4.1 GMM: a general presentation
De…nition (Optimal weighting matrix)
In the general case, the optimal weighting matrix is the inverse of the
long-run variance covariance matrix of m (yt ; θ 0 ).
!
∞
S =
(r ,r )
C. Hurlin (University of Orléans)
∑
j= ∞
E m (yt ; θ 0 ) m (yt j ; θ 0 )0
(r ,1 )
Advanced Econometrics II
(1,r )
April 2018
182 / 209
4.1 GMM: a general presentation
Remark
The optimal weighting matrix is
∞
S=
∑
E m (yt ; θ 0 ) m (yt j ; θ 0 )0
j= ∞
We can replace the unknow value θ 0 by the GMM estimator θ̂ and the
optimal weighting matrix becomes
∞
S=
∑
j= ∞
C. Hurlin (University of Orléans)
E m yt ; b
θ m yt j ; b
θ
Advanced Econometrics II
0
April 2018
183 / 209
4.1 GMM: a general presentation
Problem 1 How to estimate S?
∞
S=
∑
j= ∞
E m yt ; b
θ m yt j ; b
θ
0
A …rst solution (too) simple solution consits in using the empirical
counterparts of variance and covariances
b=
S
n 2
∑
j = (n 2 )
bj
Γ
n
bj = 1 ∑ m yt ; b
Γ
θ m yt j ; b
θ
n t =j +2
0
But, this estimator may be no positive de…nite...
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
184 / 209
4.1 GMM: a general presentation
Solution (Non-parametric kernel estimators)
A positive de…nite kernel estimator for S has been proposed by Newey and
West (1987) and is de…ned as
b=Γ
b0 +
S
q
∑
j =1
1
j
q+1
bj + Γ
bj0
Γ
n
bj = 1 ∑ m yt ; b
Γ
θ m yt j ; b
θ
n t =j +2
where q is a bandwidth parameter and K (j ) = 1
kernel function.
C. Hurlin (University of Orléans)
Advanced Econometrics II
0
j / (q + 1) a Bartlett
April 2018
185 / 209
4.1 GMM: a general presentation
Example (Newey and West kernel estimator)
b=Γ
b0 +
S
q
∑
j =1
1
j
q+1
If q = 2 then we have
bj + Γ
bj0
Γ
b=Γ
b0 + 2 Γ
b1 + Γ
b10 + 1 Γ
b2 + Γ
b20
S
3
3
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
186 / 209
4.1 GMM: a general presentation
Other estimators => other kernel functions
b=Γ
b0 +
S
1
∑K
j =1
j
q+1
bj + Γ
bj0
Γ
Gallant (1987): Parzen kernel
K (u ) =
2
q
8
<
:
1 6 ju j2 + 6 ju j3
2 (1 ju j)3
0
if 0 ju j 1/2
if 1/2 ju j 1
otherwise
Andrews (1991): quadratic spectral kernel
K (u ) =
C. Hurlin (University of Orléans)
3
(6πu/5)
2
sin (6πu/5)
(6πu/5)
Advanced Econometrics II
cos (6πu/5)
April 2018
187 / 209
4.1 GMM: a general presentation
Problem 2
b
θ = arg min m
b (y ; θ ) 0 S
∞
S=
∑
θ 2 Ra
j= ∞
1
2
1
m
b (y ; θ )
E m yt ; b
θ m yt j ; b
θ
In order to compute b
θ, we have to know S
0
1.
In order to compute S, we have to know b
θ... a circularity issue
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
188 / 209
4.1 GMM: a general presentation
Solutions
1
Two-step GMM: Hansen (1982)
2
Iterative GMM: Ferson and Foerster (1994)
3
Continuous-updating GMM: Hansen, Heaton and Yaron (1996),
Stock and Wright (2000), Newey and Smith (2003), Ma (2002).
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
189 / 209
4.1 GMM: a general presentation
Solutions
1
Two-step GMM: Hansen (1982)
2
Iterative GMM: Ferson and Foerster (1994)
3
Continuous-updating GMM: Hansen, Heaton and Yaron (1996),
Stock and Wright (2000), Newey and Smith (2003), Ma (2002).
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
190 / 209
4.1 GMM: a general presentation
Two-step GMM
Step 1: put the same weight to the r moment conditions by using an
identity weighting matrix
S0 = Ir
Compute a …rst consistent (but not e¢ cient) estimator b
θ0
b
θ0 =
=
C. Hurlin (University of Orléans)
arg min m
b ( y ; θ ) 0 S0 1 m
b (y ; θ )
θ 2 Ra
arg min m
b (y ; θ ) 0 m
b (y ; θ )
θ 2 Ra
Advanced Econometrics II
April 2018
191 / 209
4.1 GMM: a general presentation
Two-step GMM
b1
Step 2: Compute the estimator for the optimal weighting matrix S
b1 = Γ
b0 +
S
q
∑K
j =1
j
q+1
bj + Γ
bj0
Γ
n
bj = 1 ∑ m yt ; b
Γ
θ 0 m yt j ; b
θ0
n t =j +2
0
Finally, compute the e¢ cient GMM estimator b
θ 1 as
b
b 1m
θ 1 = arg min m
b (y ; θ ) 0 S
1 b (y ; θ )
θ 2Ra
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
192 / 209
Subsection 4.2
Application to dynamic panel data models
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
193 / 209
4.2 Application to dynamic panel data models
Various GMM estimators (i.e. moment conditions) have been proposed for
dynamic panel data models
1
Arellano and Bond (1991): GMM estimator
2
Arellano and Bover (1995): GMM estimator
3
Ahn and Schmidt (1995): GMM estimator
4
Blundell and Bond (2000): a system GMM estimator
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
194 / 209
4.2 Application to dynamic panel data models
Various GMM estimators (i.e. moment conditions) have been proposed for
dynamic panel data models
1
Arellano and Bond (1991): GMM estimator
2
Arellano and Bover (1995): GMM estimator
3
Ahn and Schmidt (1995): GMM estimator
4
Blundell and Bond (2000): a system GMM estimator
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
195 / 209
4.2 Application to dynamic panel data models
Problem
Let us consider the dynamic panel data model in …rst di¤erences
∆yi = ∆yi ,
1γ
+ ∆Xi β + ∆εi
i = 1, .., n
0
We want to estimate the K1 + 1 parameters θ = γ, β0 .
For that, we have r = T (T
xit are strictly exogeneous)
E (Wi ∆εi ) = E (Wi
C. Hurlin (University of Orléans)
1) (K1 + 1/2) moment conditions (if
(∆yi
∆yi ,
Advanced Econometrics II
1γ
∆Xi β)) = 0r
April 2018
196 / 209
4.2 Application to dynamic panel data models
Let us denote
m (yi , xi ; θ ) = Wi
(∆yi
∆yi ,
1γ
∆Xi β)
with
E (m (yi , xi ; θ )) = 0r
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
197 / 209
4.2 Application to dynamic panel data models
De…nition (Arellano and Bond (1991) GMM estimator)
The Arellano and Bond GMM estimator of θ = γ, β0
b
θ = arg min
θ 2 RK 1 + 1
1 n
m (yi , xi ; θ )
n i∑
=1
!0
1
S
0
is
1 n
m (yi , xi ; θ )
n i∑
=1
!
or equivalently
b
θ = arg min
θ 2 RK 1 + 1
1 n
∆εi0 Wi0
n i∑
=1
!
S
1
1 n
Wi ∆εi
n i∑
=1
!
with S = E (m (y ; θ 0 ) m (y ; θ 0 ))0 .
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
198 / 209
4.2 Application to dynamic panel data models
Under the assumption of non-autocorrelation, the optimal weighting
matrix can be expressed as
!
1 n
Wi ∆εi ∆εi0 Wi0
S =E
n2 i∑
=1
In the general case, S is the long-run variance covariance matrix of
n 2 ∑ni=1 Wi ∆εi ∆εi0 Wi0 .
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
199 / 209
4.2 Application to dynamic panel data models
Various GMM estimators (i.e. moment conditions) have been proposed for
dynamic panel data models
1
Arellano and Bond (1991): GMM estimator
2
Arellano and Bover (1995): GMM estimator
3
Ahn and Schmidt (1995): GMM estimator
4
Blundell and Bond (2000): a system GMM estimator
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
200 / 209
4.2 Application to dynamic panel data models
In addition to the previous moment conditions, Arellano and Bover (1995)
also note that E (v i ) = E (εi + αi ) = 0, where
vi = yi
γy i ,
1
β0 x i
ρ0 ω i
Therefore, if instruments q
ei exist (for instance, the constant 1 is a valid
instrument) such that
E (q
ei v i ) = 0
then a more e¢ cient GMM estimator can be derived by incorporating this
additional moment condition.
Arellano, M., and O. Bover (1995). “Another Look at the Instrumental
Variable Estimation of Error-Components Models,” Journal of Econometrics,
68, 29–51.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
201 / 209
4.2 Application to dynamic panel data models
De…nition
Arellano and Bond (1991) consider the following moment conditions
E (m (yi , xi ; θ )) = E (Wi (∆yi
∆yi ,
1γ
∆Xi β)) = 0
De…nition
Arellano and Bover (1995) consider additional moment conditions
E (m (yi , xi ; θ )) = E q
ei y i
C. Hurlin (University of Orléans)
γy i ,
1
Advanced Econometrics II
β0 x i
ρ0 ω i
=0
April 2018
202 / 209
4.2 Application to dynamic panel data models
Various GMM estimators (i.e. moment conditions) have been proposed for
dynamic panel data models
1
Arellano and Bond (1991): GMM estimator
2
Arellano and Bover (1995): GMM estimator
3
Ahn and Schmidt (1995): GMM estimator
4
Blundell and Bond (2000): a system GMM estimator
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
203 / 209
4.2 Application to dynamic panel data models
Apart from the previous linear moment conditions, Ahn and Schmidt
(1995) note that the homoscedasticity condition on E ε2it implies the
following T 2 linear conditions
E (yit ∆εi ,t +1
yi ,t +1 ∆εi ,t +1 ) = 0 t = 1, .., T
2
Combining these restrictions to the previous ones leads to a more e¢ cient
GMM estimator.
Ahn, S.C., and P. Schmidt (1995). “E¢ cient Estimation of Models for
Dynamic Panel Data,” Journal of Econometrics, 68, 5–27.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
204 / 209
4.2 Application to dynamic panel data models
Various GMM estimators (i.e. moment conditions) have been proposed for
dynamic panel data models
1
Arellano and Bond (1991): GMM estimator
2
Arellano and Bover (1995): GMM estimator
3
Ahn and Schmidt (1995): GMM estimator
4
Blundell and Bond (2000): a system GMM estimator
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
205 / 209
4.2 Application to dynamic panel data models
De…nition (system GMM)
The system GMM (Blundell and Bond) was invented to tackle the weak
instrument problem. It consists in considering both the equation in level
and in …rst di¤erences
E (yit,
s ∆εit )
=0
E (xi ,t
s ∆εit )
=0
Di¤erence equation
Following additional moments are explored:
E (∆yit,
s
(αi + εit )) = 0
E (∆xi ,t
s
(αi + εit )) = 0
Level equation
Blundell and Bond, S. (2000): GMM Estimation with persistent panel data:
an application to production functions. Econometric Reviews,19(3), 321-340.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
206 / 209
4.2 Application to dynamic panel data models
Remarks
1
While theoretically it is possible to add additional moment conditions
to improve the asymptotic e¢ ciency of GMM, it is doubtful how
much e¢ ciency gain one can achieve by using a huge number of
moment conditions in a …nite sample.
2
Moreover, if higher-moment conditions are used, the estimator can be
very sensitive to outlying observations.
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
207 / 209
4.2 Application to dynamic panel data models
Remarks
1
Through a simulation study, Ziliak (1997) has found that the
downward bias in GMM is quite severe as the number of moment
conditions expands, outweighing the gains in e¢ ciency.
2
The strategy of exploiting all the moment conditions for estimation is
actually not recommended for panel data applications. For further
discussions, see Judson and Owen (1999), Kiviet (1995), and
Wansbeek and Bekker (1996).
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
208 / 209
End of Chapter 2
Christophe Hurlin (University of Orléans)
C. Hurlin (University of Orléans)
Advanced Econometrics II
April 2018
209 / 209