IRJET-Modeling of PV based Bidirectional Battery Charger for Electric Vehicles
advertisement

International Research Journal of Engineering and Technology (IRJET)
e-ISSN: 2395-0056
Volume: 06 Issue: 08 | Aug 2019
p-ISSN: 2395-0072
www.irjet.net
Modeling of PV based Bidirectional Battery Charger for Electric
Vehicles
Moturu Arun Bhargav1, Dr. Gadi Venkata Siva Krishna Rao2
1Post
graduate scholar, Dept. of Electrical Engineering, Andhra University, Visakhapatnam, Andhrapradesh, India
2Professor, Dept. of Electrical Engineering, Andhra University, Visakhapatnam, Andhrapradesh, India
---------------------------------------------------------------------***---------------------------------------------------------------------1.1 Electric Vehicles
Abstract - As hybrid vehicles gain popularity among the
consumers, current research initiatives are focused towards
developing plug-in electric and hybrid vehicles that can exploit
utility power to charge vehicle batteries and therefore less
dependent on the gasoline usage. Power electronic systems are
being developed to allow plug-in vehicles to be vehicle-to-grid
(V2G) capable where the vehicles can work as distributed
resources and power can be sent back to the utility. In this
paper a review of different plug-in and V2G capable vehicles
are given along with their power electronics topologies. The
economic implication of charging the vehicle or sending power
back to the utility is described in brief. Finally, all vehicles with
V2G capability must meet the IEEE Standard 1547 for
connecting to the utility. Brief descriptions of the requirements
and testing that must be followed for V2G vehicles to conform
the IEEE 1547 standards are also discussed.
Key Words: Autonomous energy management system,
plugin electric vehicle, energy storage, bidirectional charger,
grid-to-vehicle, vehicle-to-grid.
1. INTRODUCTION
The continuous rise in gasoline prices along with the
increased concerns about the pollutions produced by fossil
fuel engines are forcing the current vehicle market to find
new alternatives to reduce the fossil fuel usage. Along with
the research on bio-fuel driven engines; different electric
vehicles and hybrid electric vehicles are evolving as viable
alternatives to replace, or at least reduce, the current fleet of
fossil fuel driven vehicles. Although current manufactured
electric/hybrid vehicles are being marketed as a way to
reduce fossil fuel usage, several promising technologies are
being demonstrated that can utilize power electronics to
charge the battery from the utility using plug-in vehicles or
act as a distributed resource to send power back to the
utility with vehicle-to-grid capabilities.
In this paper, different plug-in vehicle topologies are
described to review the power electronics required for them.
The newly evolving V2G technology is also discussed along
with economics and compliance requirements to allow the
vehicle to be connected to the grid. Before going into the
details of power electronics required for the electric/hybrid
vehicles, the common forms of these vehicles are described
next to get accustomed with the terminologies.
© 2019, IRJET
|
Impact Factor value: 7.34
|
A typical electric vehicle (EV) has a battery pack
connected to an electric motor and provides traction power
through the use of a transmission. The batteries are charged
primarily by a battery charger that receives its power from an
external source such as the electrical utility. Also during
regenerative braking, the motor acts as a generator which
provides power back to the batteries and in the process slows
down the vehicle. The primary advantage of an EV is that the
design is simple and has a low part count. The primary
disadvantage is that the driving range of the vehicle is limited
to the size of the battery and the time to re-charge the battery
can be from 15 minutes to 8 hours depending on how far the
vehicle was last driven, the battery type and battery charging
method.
1.2 Hybrid Electric Vehicles
The components that make up a typical hybrid electric
vehicle (HEV) include a battery pack, motor controller,
motor/generator, internal combustion engine, transmission
and driveline components. The batteries are charged
through the use of the on-board internal combustion engine
and generator. In a plug-in hybrid electric vehicle (PHEV),
the batteries can also be charged through the use of a battery
charger that receives its power from the utility. The best
PHEV design will allow the vehicle to operate on electric
power only reducing the amount of time that the engine
runs. When the vehicle is not operating, the battery can be
charged through the use of a battery charger that is “plugged
in” to the electrical utility or other energy sources. A PHEV
normally has a larger battery pack than a HEV. The
advantage of a PHEV over an HEV is that due to external
battery charging, the vehicle can run longer on electric
power which in-turn reduces engine fuel consumption.
1.3 Fuel Cell Vehicles
The prototype fuel cell vehicles (FCV) that are currently
under development mostly utilize an on-board tank to store
pressurized hydrogen. Hydrogen and conditioned air are fed
to a proton exchange membrane (PEM) stack to develop DC
power. The configuration is very similar to the electric
vehicle configuration in which a electric motor/generator
provides the mechanical power for traction. The on-board
batteries allow the energy to be stored during regenerative
braking and provide peak power to the motor controller
ISO 9001:2008 Certified Journal
|
Page 1234
International Research Journal of Engineering and Technology (IRJET)
e-ISSN: 2395-0056
Volume: 06 Issue: 08 | Aug 2019
p-ISSN: 2395-0072
www.irjet.net
during vehicle acceleration. A plug-in fuel cell vehicle (PFCV)
has a battery pack and a fuel cell that is connected to an
electric motor that provides traction power to the wheels
through a transmission. The batteries can be charged by the
use of a battery charger that receives its power from the
utility but can also be charged by using the fuel cell.
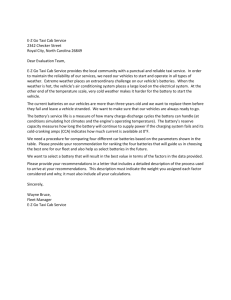
Fig -1: Typical EV configuration
2. PLUG-IN VEHICLES
According to the Electric Power Research Institute (EPRI),
more than 40% of U.S. generating capacity operates
overnight at a reduced load overnight, and it is during these
off-peak hours that most PHEVs could be recharged. Recent
studies show that if PHEVs replace one-half of all vehicles on
the road by 2050, only an 8% increase in electricity
generation (4% increase in capacity) will be required. Most
of the electric vehicles that are of plug-in type, utilize onboard battery chargers to recharge the batteries using utility
power. The simplest form of a plug-in electric vehicle is
shown in Fig. 1. This configuration consists of a battery
system and a motor controller that provides power to the
motor, which in-turn supplies power to the wheels for
traction. Many of today’s EVs use a permanent magnet
electric motor that can also act as a generator to recharge the
batteries when the brakes are applied. During regenerative
braking, the motor acts as a generator that provides power
back to the batteries and in the process slows down the
vehicle. Friction brakes are used when the vehicle must be
stopped quickly or if the batteries are at full charge.
to charge the batteries externally. For plug-in hybrid electric
vehicles, batteries are charged when they are not being
driven. This is normally accomplished through a utility
connected AC-DC converter to obtain DC power from the
grid. The batteries can also be charged directly from a solar
resource using a DC-DC converter or from a wind source
using an AC-DC converter. Energy flow is unidirectional as
power is taken from the utility to charge the battery pack. A
Toyota Prius configuration with PHEV conversion is shown
in Fig. 2. The battery voltage for most converted PHEVs are
maintained at the same level as the original design (typically
200-500 VDC) and battery modules are added in parallel to
increase the energy capacity of the battery pack, thus
allowing the electric motor to run more often than the
original HEV design. Some of the PHEV conversion
companies include: CalCars, Energy CS, Hymotion,
Electrovaya, and Hybrids Plus, and most of them use lithium
batteries.
Fig -2: Configurations of converted PHEV
Table -1: Average Cell Voltage during Discharge in
Various Rechargeable Batteries
Cell Volts
Remark
Lead-acid
2.0
Least cost technology
Nickel-cadmium
1.2
Exhibits memory effect
The components that make up a typical HEV include a
battery pack, motor controller, motor/generator, internal
combustion engine, transmission and driveline components.
The primary power electronics include a DC-AC motor
controller which provides three-phase power to a
permanent magnet motor. The Toyota Prius HEV
configuration is given in Fig. 2. The Prius design uses two
permanent magnet motors/generator, one of 10kW and the
other of 50kW. The battery is connected to a booster and
inverter before feeding to the motor/generators. The power
electronics are bidirectional and used for both charging the
battery and powering the motors. The motor/generators and
gasoline engine feed into a planetary gear set. The system
operates in a continuously variable transmission (CVT)
mode where the gear ratio is determined by the power
transfer between the battery, motor/generators and gasoline
engine. The batteries can also be charged using regenerative
braking of the large motor/generators. There is no provision
Nickel-metal
hydride
1.2
Temperature sensitive
Lithium-ion
3.6
Safe, contains no
metallic lithium
Lithium-polymer
3.0
Contains metallic
lithium
Zinc-air
1.2
Requires good air
management to limt
self-discharge rate
© 2019, IRJET
ISO 9001:2008 Certified Journal
|
Impact Factor value: 7.34
|
Electrochemistry
|
Page 1235
International Research Journal of Engineering and Technology (IRJET)
e-ISSN: 2395-0056
Volume: 06 Issue: 08 | Aug 2019
p-ISSN: 2395-0072
www.irjet.net
2.1 Plug-in Electric Vehicle Charger Topology
The desirable characteristics for the charger are power
bi-directionality (V2G and G2V), power factor equal to one,
capability of performing power control, low PQ impact,
construction and topology simplicity, and regular 16 A
single-phase plug compatibility. This charger does not allow
performing fast charge, being 2.3 kW (10 A, 230 V) the
advisable maximum power for a single-phase householdtype plug. This power range is defined based on EU
standards and power grid restrictions, since higher power
ranges could represent a negative impact on the low voltage
(LV) grid in terms of PQ and EMS requirements [22]–[24].
Regarding the voltage level of the battery pack, the proposed
design is focused on L-category vehicles (two-, three- and
four-wheel vehicles such as motorcycles, mopeds, quads, and
minicars), as the one studied in [25], but could be extended
to other voltage levels.
For the chopper controller design, some assumptions were
made to facilitate circuit analysis: capacities in both sides of
the chopper are high enough for considering constant
voltage, low L capacity (when compared to the Cbus capacity),
and negligible switching losses.
For establishing the control laws, it was necessary to
determine the differential equations describing the energy
demand of the converter (see (21)–(24)), according to
Kirchhoff laws. Typically, the state variables in the
converters are associated with the energy stored in
capacitors and inductors, leading to VCbus in the DC bus,
VBAT in the batteries, and IL in the chopper inductor as
displayed in Figure 4.
Fig -4: DC/DC converter controller architecture for V2G
and G2V operation modes
Fig -3: PEV charger topology
The topology presented in Figure 3 is formed by three
legs of two Insulated Gate Bipolar Transistors (IGBT),
denoted by Sj ∈ {1, . . . , 6}. The IGBTs are used due to their
good compromise characteristics associated with voltage,
switching frequency and current limits. These power
switches are used for an AC/DC converter that operates as a
controlled rectifier or as an inverter for G2V or V2G
operation modes, respectively, and for a DC/DC converter (C
class chopper) in which the power used for both modes is
restricted, as discussed below. The features of converters
meet the desired bi-directionality, where the chopper
operates as buck and boost for G2V and V2G operation
modes, respectively. Some passive elements for filtering and
energy storage purposes are also designed and
implemented, which are relevant for achieving proper
system dynamics, stability and power quality.
Fig -5: AC/DC converter controller architecture for V2G
and G2V operation modes.
The controllers are PI-based and they aim at properly
controlling the IGBT switching following voltage and current
references.
The controller for the rectifier is also PI based. A daisy chain
of two PI controllers for DC bus voltage and AC current
regulation is used. For AC current regulation, a phase-locked
loop (PLL) is also used providing AC current control
reference as stated in [30]. This controller was firstly tuned
using a pole placement approach and then refined through
experimental tests, being the final IGBT PWM signal
provided by the unipolar PWM generator. The controller
used for the AC/DC converter when this works as inverter is
based only on the unipolar switching method. A unit
sinusoid reference provided by a PLL is used, which is
synchronized with the voltage grid. In this operation mode,
the DC bus available power was already restricted by the
chopper, being at this point only mandatory inverting the DC
bus voltage in a proper way. Both AC/DC converter
controllers are presented in Figure 5.
© 2019, IRJET
ISO 9001:2008 Certified Journal
3. CONTROLLERS DESIGN
|
Impact Factor value: 7.34
|
|
Page 1236
International Research Journal of Engineering and Technology (IRJET)
e-ISSN: 2395-0056
Volume: 06 Issue: 08 | Aug 2019
p-ISSN: 2395-0072
www.irjet.net
4. EXPERIMENTAL RESULTS
The experimental results have been obtained using a
reduced scale setup (with power levels 5 times lower than
the full scale). It is important to note that in this reduced
scale setup the DCBUS voltage was stabilized around 108 V
and Pmax was ±460W, being the “Advisable Energy Levels”
used for sizing, simulation and further full-scale
implementation. This setup uses the LEM HY25-P and LV 25P transducers for current and voltage acquisition,
respectively, as presented in Figs. 3 and 4. A DSP from NI for
control and data logging purpose is also used, jointly with
other laboratory equipment and several electronic
components, as presented in Fig. 6.
Fig -6: Simulation Diagram for PV based V2G System
Fig -9: Simulation Result for Inverter Voltage and Current
5. CONCLUSION
Use of power electronics can convert electric and hybrid
vehicles into plug-in or even V2G capable. With adequate
power conversion, a plug-in vehicle can be charged from
utility or a V2G capable vehicle can send power back to the
utility. With ever rising gas prices and with energy policy
thrust towards distributed resources, electric and hybrid
vehicle with plug-in and V2G capability will surely get
increased consumer and commercial attention in near
future. Currently, the National Renewable Energy Laboratory
(NREL) is reviewing various plug-in and V2G capable
vehicles and performing tests to verify utility connection
standards for these vehicles. The test results will be
published in future papers as soon as the testing is complete.
6. REFERENCES
[1]
Pacific Gas and Electric Company (PG&E) News Release,
“Pacific Gas and Electric Company energizes silicon
valley with vehicle-to-grid technology,” April 2007.
[2]
Electric Power Research Institute (EPRI) Report,
“Technology primer: the plug-in hybrid electric vehicle,”
pp. 1-2, 2007.
[3]
T. Jahns and V. Blasko, “Recent advances in power
electronics technology for industrial and traction
machine drives,” Proc. of the IEEE, vol. 89, no. 6, pp. 963
– 975, June 2001.
[4]
K. Wipke, S. Sprik, J. Kurtz, and H. Thomas, “Learning
demonstration progress report – September 2007,”
National Renewable Energy Laboratory Report, NREL
TP-560-42264, pp. 41, September 2007.
[5]
K. Parks, P. Denholm, and T. Markel, “Costs and
emissions associated with plug-in hybrid electric vehicle
charging in the Xcel Energy Colorado service territory,”
National Renewable Energy Laboratory Report, NREL
TP-640-41410, pp. 29, May 2007.
[6]
T. Markel, A. Brooker, J. Gonder, M. O'Keefe, A. Simpson,
and M. Thornton, “Plug-in hybrid vehicle analysis,” DOE
Milestone Report, NREL MP-540-40609, pp. 189,
November 2006.
Fig -7: Simulation Result for PV, Grid and Battery Powers
Fig -8: Simulation Result for DC Voltage and Current
© 2019, IRJET
|
Impact Factor value: 7.34
|
ISO 9001:2008 Certified Journal
|
Page 1237
International Research Journal of Engineering and Technology (IRJET)
e-ISSN: 2395-0056
Volume: 06 Issue: 08 | Aug 2019
p-ISSN: 2395-0072
www.irjet.net
[7]
W. Short and P. Denholm, “Preliminary assessment of
plug-in hybrid electric vehicles on wind energy
markets,” National Renewable Energy Laboratory
Report, NREL TP-620-39729, pp. 41, April 2006.
[8]
J. Tomic and W. Kempton, “Using fleets of electric-drive
vehicles for grid support,” Elsevier J. of Power Sources,
vol. 168, no. 2, pp. 459– 468, June 2007.
[9]
E. Hirst and B. Kirby, “What is system control,” Proc. of
American Power Conference, Chicago, IL, April 1999.
[10]
B. Kirby, “Frequency regulation basics and trends,” Oak
Ridge National Laboratory Report, ORNL TM-2004-29,
pp. 32, December 2004.
© 2019, IRJET
|
Impact Factor value: 7.34
|
ISO 9001:2008 Certified Journal
|
Page 1238