MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 1-1
Statement:
1-1-1
It is often said, "Build a better mousetrap and the world will beat a path to your door." Consider this problem and write a goal statement and a set of at least 12 task specifications that you would apply to its solution. Then suggest 3 possible concepts to achieve the goal. Make annotated, freehand sketches of the concepts.
Solution:
Goal Statement: Create a mouse-free environment.
Task Specifications:
1. Cost less than $1.00 per use or application.
2. Allow disposal without human contact with mouse.
3. Be safe for other animals such as house pets.
4. Provide no threat to children or adults in normal use.
5. Be a humane method for the mouse.
6. Be environmentally friendly.
7. Have a shelf-life of at least 3 months.
8. Leave no residue.
9. Create minimum audible noise in use.
10. Create no detectable odors within 1 day of use.
11. Be biodegradable.
12. Be simple to use with minimal written instructions necessary.
Concepts and sketches are left to the student. There are an infinity of possibilities.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 1-2
Statement: A bowling machine is desired to allow quadriplegic youths, who can only move a joystick, to engage in the sport of bowling at a conventional bowling alley. Consider the factors involved, write a goal statement, and develop a set of at least 12 task specifications that constrain this problem. Then suggest 3 possible concepts to achieve the goal. Make annotated, freehand sketches of the concepts.
1-2-1
Solution:
Goal Statement: Create a means to allow a quadriplegic to bowl.
Task Specifications:
1. Cost no more than $2 000.
2. Portable by no more than two able-bodied adults.
3. Fit through a standard doorway.
4. Provide no threat of injury to user in normal use.
5. Operate from a 110 V, 60 Hz, 20 amp circuit.
6. Be visually unthreatening.
7. Be easily positioned at bowling alley.
8. Have ball-aiming ability, controllable by user.
9. Automatically reload returned balls.
10. Require no more than 1 able-bodied adult for assistance in use.
11. Ball release requires no more than a mouth stick-switch closure.
12. Be simple to use with minimal written instructions necessary.
Concepts and sketches are left to the student. There are an infinity of possibilities.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 1-3
Statement:
1-3-1
A quadriplegic needs an automated page turner to allow her to read books without assistance.
Consider the factors involved, write a goal statement, and develop a set of at least 12 task specifications that constrain this problem. Then suggest 3 possible concepts to achieve the goal.
Make annotated, freehand sketches of the concepts.
Solution:
Goal Statement: Create a means to allow a quadriplegic to read standard books with minimum assistance.
Task Specifications:
1. Cost no more than $1 000.
2. Useable in bed or from a seated position
3. Accept standard books from 8.5 x 11 in to 4 x 6 in in planform and up to 1.5 in thick.
4. Book may be placed, and device set up, by able-bodied person.
5. Operate from a 110 V, 60 Hz, 15 amp circuit or by battery power.
6. Be visually unthreatening and safe to use.
7. Require no more than 1 able-bodied adult for assistance in use.
8. Useable in absence of assistant once set up.
9. Not damage books.
10. Timing controlled by user.
11. Page turning requires no more than a mouth stick-switch closure.
12. Be simple to use with minimal written instructions necessary.
Concepts and sketches are left to the student. There are an infinity of possibilities.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 1-4
Statement: Convert a mass of 1 000 lbm to (a) lbf, (b) slugs, (c) blobs, (d) kg.
Units: blob := lbf sec
2 in
Given:
Solution:
Mass
See Mathcad file P0104.
M := 1000 lb
1. To determine the weight of the given mass, multiply the mass value by the acceleration due to gravity, g.
W := M g W = 1000 lbf
2. Convert mass units by assigning different units to the units place-holder when displaying the mass value.
Slugs
Blobs
Kilograms
M
M
M
=
=
=
31.081
2.59
slug blob
453.592
kg
1-4-1
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 1-5
Statement: A 250-lbm mass is accelerated at 40 in/sec2. Find the force in lb needed for this acceleration.
1-5-1
Given: Mass M := 250 lb Acceleration a := 40 in sec
2
Solution: See Mathcad file P0105.
1. To determine the force required, multiply the mass value, in slugs, by the acceleration in feet per second squared.
Convert mass to slugs: M = 7.770
slug
Convert acceleration to feet per second squared:
F := M a F = 25.9
lbf a = 3.333
s
2 ft
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 1-6
Statement:
Units:
Express a 100-kg mass in units of slugs, blobs, and lbm. How much does this mass weigh?
blob lbf sec
2 in
1-6-1
Given: M 100 kg
Assumptions: The mass is at sea-level and the gravitational acceleration is g 32.174
ft sec
2 or g 386.089
in sec
2 or g 9.807
m sec
2
Solution: See Mathcad file P0106.
1. Convert mass units by assigning different units to the units place-holder when displaying the mass value.
The mass, in slugs , is M 6.85
slug
The mass, in blobs , is M 0.571
blob
The mass, in lbm , is M 220.5
lb
Note: Mathcad uses lbf for pound-force, and lb for pound-mass.
2. To determine the weight of the given mass, multiply the mass value by the acceleration due to gravity, g.
The weight, in lbf , is W M g W 220.5
lbf
The weight, in N , is W M g W 980.7
N
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 1-7
Statement:
1-7-1
Prepare an interactive computer program (using, for example, Excell, Mathcad, or TKSolver) from which the cross-sectional properties for the shapes shown in the inside front cover can be calculated. Arrange the program to deal with both ips and SI unit systems and convert the results between those systems.
Solution: See the inside front cover and Mathcad file P0107.
1. Rectangle, let: b 3 in h 4 in
Area A b h
Moment about x -axis
Moment about y -axis
I x b h
3
12
I y h b
3
12
A 12.000
in
2
A 7742 mm
2
I x
I x
16.000
in
4
6.660
10
6 mm
4
I y
I y
9.000
in
4
3.746
10
6 mm
4
Radius of gyration about x -axis k x
I x
A k x k x
1.155
in
29.329
mm
Radius of gyration about y -axis k y
I y
A
Polar moment of inertia J z
I x
I y k y k y
0.866
in
21.997
mm
J z
J z
25.000
in
4
1.041
10
7 mm
4
2. Solid circle, let:
D 3 in
Area A
π D
2
4
A 7.069
in
2
A 4560 mm
2
Moment about x -axis I x
π D
4
64
Moment about y -axis I y
π D
4
64
I x
I x
3.976
in
4
1.655
10
6 mm
4
I y
I y
3.976
in
4
1.655
10
6 mm
4
Radius of gyration about x -axis k x
I x
A k x k x
0.750
in
19.05
mm
MACHINE DESIGN - An Integrated Approach, 4th Ed.
Radius of gyration about y -axis
Polar moment of inertia k y
J z
I y
A
π D
4
32
3. Hollow circle, let:
Area
D 3 in
Moment about x -axis d 1 in
A
π
4
D
2 d
2
I x
π
64
D
4 d
4
Moment about y -axis I y
π
64
D
4 d
4
Radius of gyration about x -axis k x
Radius of gyration about y -axis k y
I y
A
I x
A
Polar moment of inertia J z
π
32
D
4 d
4
4. Solid semicircle, let:
Area
D 3 in R 0.5
D
A
π D
2
8
Moment about x -axis
Moment about y -axis
I x
0.1098
R
4
I y
π R
4
8 k y k y
0.750
in
19.05
mm
J z
J z
7.952
in
4
3.310
10
6 mm
4
1-7-2
A 6.283
in
2
A 4054 mm
2
I x
I x
3.927
in
4
1.635
10
6 mm
4
I y
I y
3.927
in
4
1.635
10
6 mm
4 k x k x
0.791
in
20.08
mm k y k y
0.791
in
20.08
mm
J z
J z
7.854
in
4
3.269
10
6 mm
4
R 1.5
in
A 3.534
in
2
A 2280 mm
2
I x
I x
I y
I y
0.556
in
4
2.314
10
5 mm
4
1.988
in
4
8.275
10
5 mm
4
MACHINE DESIGN - An Integrated Approach, 4th Ed.
Radius of gyration about x -axis k x
Radius of gyration about y -axis k y
I y
A
I x
A
Polar moment of inertia J z
I x
I y
Distances to centroid a 0.4244
R b 0.5756
R
5. Right triangle, let:
Area b 2
Moment about
Moment about x y in
-axis
-axis h 1 in
A b h
2
I x b h
3
36
I y h b
3
36
Radius of gyration about x -axis k x
I x
A
Radius of gyration about y -axis k y
I y
A
Polar moment of inertia J z
I x
I y k x k x
0.397
in
10.073
mm
J z
J z k y k y
0.750
19.05
in mm
2.544
in
4
1.059
10
6 a 0.637
in a 16.17
mm mm
4 b 0.863
in b 21.93
mm
1-7-3
A 1.000
in
2
A 645 mm
2
I x
I x
0.056
in
4
2.312
10
4 mm
4
I y
I y
0.222
in
4
9.250
10
4 mm
4 k x k x
0.236
in
5.987
mm k y k y
0.471
in
11.974
mm
J z
J z
0.278
in
4
1.156
10
5 mm
4
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 1-8
Statement:
1-8-1
Prepare an interactive computer program (using, for example, Excell, Mathcad, or TKSolver) from which the mass properties for the solids shown in the page opposite the inside front cover can be calculated. Arrange the program to deal with both ips and SI unit systems and convert the results between those systems.
Units:
Solution: lbf sec
2 blob in
See the page opposite the inside front cover and Mathcad file P0108.
1. Rectangular prism, let: a 2 in b 3 in c 4 in γ 0.28
lbf in
3
Volume V a b c V 24.000
in
3
V 393290 mm
3
Mass M
V g
γ
M 0.017
blob
M 3.048
kg
Moment about x -axis I x
M a
2
12 b
2
Moment about y -axis I y
M a
2
12 c
2
I x
I x
0.019
blob in
2
2130.4
kg mm
2
I y
I y
0.029
blob in
2
3277.6
kg mm
2
Moment about z -axis I z
M b
2
12 c
2
I z
I z
0.036
blob in
2
4097.0
kg mm
2
Radius of gyration about x -axis k x
I x
M k x k x
1.041
in
26.437
mm
Radius of gyration about y -axis k y
I y
M k y k y
1.291
in
32.791
mm
Radius of gyration about z -axis k z
I z
M k z k z
1.443
in
36.662
mm
2.Cylinder, let: r 2 in
Volume
L 3 in γ 0.30
lbf in
3
V π r
2
L
Mass M
V g
γ
V 37.699
in
3
V 617778 mm
3
M 0.029
blob
M 5.13
kg
MACHINE DESIGN - An Integrated Approach, 4th Ed.
Moment about x -axis
Moment about y -axis
Moment about z -axis
Radius of gyration about x -axis k x
Radius of gyration about y -axis k y
Radius of gyration about z -axis
I x
M r
2
2
I y
M 3 r
2
12
L
2
I z
M 3 r
2
12
L
2 k z
I y
M
I x
M
I z
M
I x
I x
I y
I y
I
I z z
0.059
blob in
2
6619.4
kg mm
2
0.051
blob in
2
5791.9
kg mm
2
0.051
blob in
2
5791.9
kg mm
2 k x k x
1.414
in
35.921
mm k y k y
1.323
in
33.601
mm k z k z
1.323
in
33.601
mm
3. Hollow cylinder, let: a 2 in
Volume
Mass b 3 in L 4 in
V π b
2
γ 0.28
lbf in
3 a
2
L V 62.832
in
3
V 1029630 mm
3
M
V γ g
M 0.046
blob
M 7.98
kg
Moment about
Moment about
Moment about x y z
-axis
-axis
-axis
Radius of gyration about x -axis
Radius of gyration about y -axis
I
I
I x y z k x k y
M
2 a
2 b
2
M
12
3 a
2
3 b
2
L
2
I y
I y
0.209
blob in
2
2.4
10
4 kg mm
2
M
12
3 a
2
3 b
2
L
2
I x
I x
0.296
blob in
2
3.3
10
4 kg mm
2
I z
I z
0.209
blob in
2.4
10
4
2 kg mm
2
I x
M k x k x
2.550
in
64.758
mm
I y
M k y k y
2.141
in
54.378
mm
1-8-2
MACHINE DESIGN - An Integrated Approach, 4th Ed.
Radius of gyration about z -axis k z
I z
M k z k z
2.141
in
54.378
mm
4. Right circular cone, let: r 2 in
Volume
Mass
Moment about x -axis
Moment about y -axis
Moment about z -axis h 5 in
V
M
γ 0.28
lbf in
π r
2 h
3
3
V 20.944
in
3
V 343210 mm
3
V g
γ
M 0.015
blob
M 2.66
kg
I x
3
10
M r
2
Radius of gyration about x -axis k x
Radius of gyration about y -axis k y
Radius of gyration about z -axis
I y
M
12 r
2
80
3 h
2
I z
M
12 r
2
80
3 h
2 k z
I z
M
I y
M
I x
M
I x
I x
0.018
blob in
2
2059.4
kg mm
2
I y
I y
0.023
blob in
2
2638.5
kg mm
2
I z
I z
0.023
blob in
2
2638.5
kg mm
2 k x k x
1.095
in
27.824
mm k y k y
1.240
in
31.495
mm k z k z
1.240
in
31.495
mm
5. Sphere, let: r 3 in
Volume V
4
3
π r
3
V 113.097
in
3
V 1853333 mm
3
Mass M
V g
γ
Moment about x -axis I x
2
5
M r
2
M 0.082
blob
M 14.364
kg
I x
I x
0.295
blob in
2
33362 kg mm
2
1-8-3
MACHINE DESIGN - An Integrated Approach, 4th Ed.
Moment about y -axis I y
2
5
M r
2
Moment about z -axis
Radius of gyration about x -axis
I z
2
5
M r
2 k x
I x
M
Radius of gyration about
Radius of gyration about y z
-axis
-axis k k y z
I z
M
I y
M
I z
I z
I y
I y
0.295
blob in
2
33362 kg mm
2
0.295
blob in
2
33362 kg mm
2 k x k x
1.897
in
48.193
mm k y k y
1.897
in
48.193
mm k z k z
1.897
in
48.193
mm
1-8-4
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 1-9
Statement:
1-9-1
Convert the template in Problem 1-7 to have and use a set of functions or subroutines that can be called from within any program in that language to solve for the cross-sectional properties of the shapes shown on the inside front cover.
Solution: See inside front cover and Mathcad file P0109.
1. Rectangle: Area
Moment about
Moment about x y
-axis
-axis
A b h ) b h
I
I x y
(
( b h b h
)
) b h
3
12 h b
3
12
2. Solid circle: Area
Moment about x -axis
Moment about y -axis
I x
I y
π D
2
4
π D
4
64
π D
4
64
3. Hollow circle: Area
Moment about x -axis
Moment about y -axis
A D d )
I x
( D d )
π
4
D
2
π
64
D
4 d
2 d
4
I y
( D d )
π
64
D
4 d
4
4. Solid semicircle:
Area
Moment about x -axis
Moment about y -axis
5. Right triangle:
Area
Moment about x -axis
Moment about y -axis
π D
2
8
I x
R 0.1098
R
4
I y
π R
4
8
A b h )
I
I x y
(
( b h b h
)
) b h
2 b h
3
36 h b
3
36
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 1-10
1-10-1
Statement: Convert the template in Problem 1-8 to have and use a set of functions or subroutines that can be called from within any program in that language to solve for the cross-sectional properties of the shapes shown on the page opposite the inside front cover.
Solution: See the page opposite the inside front cover and Mathcad file P0110.
1 Rectangular prism:
Volume
Mass
Moment about x -axis
Moment about y -axis
Moment about z -axis
V a b c ) a b c
I x
( a b c
I y
( a b c
I z
( a b c
γ
γ )
γ )
γ )
)
V a b c ) γ g
γ ) a
2
12
γ ) a
2
12
γ ) b
2
12 b
2 c
2 c
2
2. Cylinder:
Volume
Mass
Moment about x -axis
Moment about y -axis
Moment about z -axis
V r L )
I x
( r L
I y
( r L
I z
( r L
γ
γ )
γ )
γ )
)
π r
2
L
V r L ) γ g
2
γ ) r
2
γ ) 3 r
2
12
γ ) 3 r
2
12
L
2
L
2
3. Hollow cylinder:
Volume
Mass
Moment about x -axis
Moment about y -axis
Moment about z -axis
V a b L )
I x
( a b L
I y
( a b L
I z
( a b L
γ
γ )
γ )
γ )
)
π b
2 a
2
L
V a b L ) γ g
γ ) a
2
2
γ )
3 a
2
12 b
2
3 b
2
γ )
3 a
2
12
3 b
2
L
2
L
2
MACHINE DESIGN - An Integrated Approach, 4th Ed.
4. Right circular cone:
Volume
Mass
V r h )
γ )
π r
2 h
3
V r h ) γ g
Moment about x -axis
Moment about y -axis
Moment about z -axis
I x
( r h γ )
3
10
γ ) r
2
I y
( r h γ ) M r h γ )
12 r
2
80
3 h
2
I z
( r h γ ) M r h γ )
12 r
2
80
3 h
2
5. Sphere:
Volume
Mass M r γ )
4
3
π r
3 g
γ
Moment about x -axis
Moment about y -axis
Moment about z -axis
I x
( r γ )
I y
( r γ )
I z
( r γ )
2
5
M r γ ) r
2
2
5
M r γ ) r
2
2
5
M r γ ) r
2
1-10-2
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-1-1
PROBLEM 2-1
Statement: Figure P2-1 shows stress-strain curves for three failed tensile-test specimens. All are plotted on the same scale.
(a) Characterize each material as brittle or ductile.
(b) Which is the stiffest?
(c) Which has the highest ultimate strength?
(d) Which has the largest modulus of resilience?
(e) Which has the largest modulus of toughness?
Solution: See Figure P2-1 and Mathcad file P0201.
1. The material in Figure P2-1(a) has a moderate amount of strain beyond the yield point, P2-1(b) has very little, and
P2-1(c) has considerably more than either of the other two. Based on this observation, the material in Figure
P2-1(a) is mildly ductile, that in P2-1(b)is brittle, and that in P2-1(c) is ductile.
2. The stiffest material is the one with the grearesr slope in the elastic range. Determine this by dividing the rise by the run of the straight-line portion of each curve. The material in Figure P2-1(c) has a slope of 5 stress units per strain unit, which is the greatest of the three. Therefore, P2-1(c) is the stiffest.
3. Ultimate strength corresponds to the highest stress that is achieved by a material under test. The material in
Figure P2-1(b) has a maximum stress of 10 units, which is considerably more than either of the other two.
Therefore, P2-1(b) has the highest ultimate str ength.
4. The modulus of resilience is the area under the elastic portion of the stress-starin curve. From observation of the three graphs, the stress and strain values at the yield points are:
P2-1(a) σ ya
:= 5 ε ya
:= 5
P2-1(b) σ yb
:= 9 ε yb
:= 2
P2-1(c) σ yc
:= 5 ε yc
:= 1
Using equation (2.7), the modulus of resiliency for each material is, approximately,
P21a :=
1
2
⋅ σ ya
⋅ ε ya
P21b :=
1
2
⋅ σ yb
⋅ ε yb
P21c :=
1
2
⋅ σ yc
⋅ ε yc
P2-1 (a) has the largest modulus of resilience
P21a = 12.5
P21b = 9
5. The modulus of toughness is the area under the stress-starin curve up to the point of fracture. By inspection,
P2-1 (c) has the largest area under the stress-strain curve therefore, it has the largest modulus of toughness.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-2-1
PROBLEM 2-2
Statement: Determine an approximate ratio between the yield strength and ultimate strength for each material shown in Figure P2-1.
Solution: See Figure P2-1 and Mathcad file P0202.
1. The yield strength is the value of stress at which the stress-strain curve begins to be nonlinear. The ultimate strength is the maximum value of stress attained during the test. From the figure, we have the following values of yield strength and tensile strength:
Figure P2-1(a) S ya
:= 5 S ua
:= 6
Figure P2-1(b) S yb
:= 9 S ub
:= 10
Figure P2-1(c) S yc
:= 5 S uc
2. The ratio of yield strength to ultimate strength for each material is:
:= 8
Figure P2-1(a) ratio a
:=
S ya
S ua ratio a
= 0.83
Figure P2-1(b)
Figure P2-1(c) ratio b
:=
S yb
S ub ratio c
:=
S yc
S uc ratio ratio b c
=
=
0.90
0.63
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 2-3
Statement: Which of the steel alloys shown in Figure 2-19 would you choose to obtain
(a) Maximum strength
(b) Maximum modulus of resilience
(c) Maximum modulus of toughness
(d) Maximum stiffness
2-3-1
Given:
Solution:
Young's modulus for steel E
See Figure 2-19 and Mathcad file P0203.
207 GPa
1. Determine from the graph: values for yield strength, ultimate strength and strain at fracture for each material.
Steel Yield Strength Ultimate Strength Fracture Strain
AISI 1020: Sy
1020
300 MPa Sut
1020
400 MPa ε f
1020
0.365
AISI 1095: Sy
1095
550 MPa Sut
1095
1050 MPa ε f
1095
0.11
AISI 4142: Sy
4142
1600 MPa Sut
4142
2430 MPa ε f
4142
0.06
Note: The 0.2% offset method was used to define a yield strength for the AISI 1095 and the 4142 steels.
2. From the values of S ut
above it is clear that the AISI 4142 has maximum strength.
3. Using equation (2-7) and the data above, determine the modulus of resilience.
U
R1020
1 Sy
1020
2
U
R1020
0.22
MN m
2 E m
3
U
R1095
1
Sy
1095
2
U
R1095
0.73
MN m
2 E m
3
U
R4142
1
Sy
4142
2
U
R4142
6.18
MN m
2 E m
3
Even though the data is approximate, the AISI 4142 clearly has the largest modulus of resilience.
4. Using equation (2-8) and the data above, determine the modulus of toughness.
U
T1020
U
T1095
1
2
1
2
Sy
1020
Sy
1095
Sut
1020
Sut
1095
ε
ε f f
1020
1095
U
T1020
U
T1095
128
MN m m
3
88
MN m m
3
U
T4142
1
Sy
4142
Sut
4142
ε f
4142
U
T4142
121
MN m
2 m
3
Since the data is approximate, there is no significant difference between the 1020 and 4142 steels. Because of the wide difference in shape and character of the curves, one should also determine the area under the curves by graphical means. When this is done, the area under the curve is about 62 square units for 1020 and 66 for 4142. Thus, they seem to have about equal toughness, which is about 50% greater than that for the 1095 steel.
5. All three materials are steel therefore, the stiffnesses are the same .
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 2-4
Statement: Which of the aluminum alloys shown in Figure 2-21 would you choose to obtain
(a) Maximum strength
(b) Maximum modulus of resilience
(c) Maximum modulus of toughness
(d) Maximum stiffness
2-4-1
Given:
Solution:
Young's modulus for aluminum E
See Figure 2-21 and Mathcad file P0204.
71.7
GPa
1. Determine, from the graph, values for yield strength, ultimate strength and strain at fracture for each material.
Alum Yield Strength Ultimate Strength Fracture Strain
1100: Sy
1100
120 MPa Sut
1100
130 MPa ε f
1100
0.170
2024-T351: Sy
2024
330 MPa Sut
2024
480 MPa ε f
2024
0.195
7075-T6: Sy
7075
510 MPa Sut
7075
560 MPa ε f
7075
0.165
Note: The 0.2% offset method was used to define a yield strength for all of the aluminums.
2. From the values of Sut above it is clear that the 7075-T6 has maximum strength .
3. Using equation (2-7) and the data above, determine the modulus of resilience.
U
U
R1100
R2024
1
2
1
2
Sy
Sy
1100
2
E
2024
2
E
U
U
R1100
R2024
0.10
MN m m
3
0.76
MN m m
3
U
R7075
1
2
Sy
7075
2
E
U
R7075
1.81
MN m m
3
Even though the data is approximate, the 7075-T6 clearly has the largest modulus of resilience.
4. Using equation (2-8) and the data above, determine the modulus of toughness.
U
T1100
U
T2024
1
2
1
2
Sy
1100
Sy
2024
Sut
1100
Sut
2024
ε
ε f f
1100
2024
U
T1100
U
T2024
21
MN m m
3
79
MN m m
3
U
T7075
1
Sy
7075
Sut
7075
ε f
7075
U
T7075
88
MN m
2 m
3
Even though the data is approximate, the 7075-T6 has the largest modulus of toughness.
5. All three materials are aluminum therefore, the stiffnesses are the same .
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 2-5
Statement: Which of the thermoplastic polymers shown in Figure 2-22 would you choose to obtain
(a) Maximum strength
(b) Maximum modulus of resilience
(c) Maximum modulus of toughness
(d) Maximum stiffness
2-5-1
Solution: See Figure 2-22 and Mathcad file P0205.
1. Determine, from the graph, values for yield strength, ultimate strength, strain at fracture, and modulus of elasticity for each material.
Plastic Yield Strength Ultimate Strength Fracture Strain Mod of Elasticity
Nylon 101: Sy
Nylon
63 MPa Sut
Nylon
80 MPa ε f
Nylon
0.52
E
Nylon
1.1
GPa
HDPE: Sy
HDPE
15 MPa Sut
HDPE
23 MPa ε f
HDPE
3.0
E
HDPE
0.7
GPa
PTFE: Sy
PTFE
8.3
MPa Sut
PTFE
13 MPa ε f
PTFE
0.51
E
PTFE
0.8
GPa
2. From the values of Sut above it is clear that the Nylon 101 has maximum strength .
3. Using equation (2-7) and the data above, determine the modulus of resilience.
U
RNylon
1
2
Sy
Nylon
2
E
Nylon
U
RNylon
1.8
MN m m
3
U
RHDPE
1
2
Sy
HDPE
2
E
HDPE
U
RHDPE
0.16
MN m m
3
U
RPTFE
1
2
Sy
PTFE
2
E
PTFE
U
RPTFE
0.04
MN m m
3
Even though the data is approximate, the Nylon 101 clearly has the largest modulus of resilience.
4. Using equation (2-8) and the data above, determine the modulus of toughness.
U
TNylon
U
THDPE
1
2
Sy
Nylon
1
2
Sy
HDPE
Sut
Nylon
ε f
Nylon
U
TNylon
37
MN m m
3
Sut
HDPE
ε f
HDPE
U
THDPE
57
MN m m
3
U
TPTFE
1
2
Sy
PTFE
Sut
PTFE
ε f
PTFE
U
TPTFE
5
MN m m
3
Even though the data is approximate, the HDPE has the largest modulus of toughness.
5. The Nylon 101 has the steepest slope in the (approximately) elastic range and is, therefore, the stiffest of the three materials..
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-6-1
PROBLEM 2-6
Statement: A metal has a strength of 414 MPa at its elastic limit and the strain at that point is 0.002. What is the modulus of elasticity? What is the strain energy at the elastic limit? Assume that the test speimen is 12.8-mm dia and has a 50-mm gage length. Can you define the type of metal based on the given data?
Given: Elastic limit: Strength S el
414 MPa Strain ε el
0.002
Test specimen: Diameter d o
12.8
mm Length L o
50 mm
Solution: See Mathcad file P0206.
1. The modulus of elasticity is the slope of the stress-strain curve, which is a straight line, in the elastic region.
Since one end of this line is at the origin, the slope (modulus of elasticity) is
E
S el
ε el
E 207 GPa
2. The strain energy per unit volume at the elastic limit is the area under the stress-strain curve up to the elastic limit. Since the curve is a straight line up to this limit, the area is one-half the base times the height, or
U' el
1
2
S el
ε el
U' el
414 kN m m
3
The total strain energy in the specimen is the strain energy per unit volume times the volume,
U el
U' el
π d o
2
4
L o
U el
2.7
N m
3. Based on the modulus of elasticity and using Table C-1, the material is steel .
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 2-7
Statement: A metal has a strength of 41.2 kpsi (284 MPa) at its elastic limit and the strain at that point is
0.004. What is the modulus of elasticity? What is the strain energy at the elastic limit?
Assume that the test speimen is 0.505-in dia and has a 2-in gage length. Can you define the type of metal based on the given data?
Given:
Solution:
Elastic limit: Strength S el
Test specimen: Diameter d o
See Mathcad file P0207.
41.2
ksi Strain ε el
0.505
in Length L o
0.004
2.00
in
S el
284 MPa
2-7-1
1. The modulus of elasticity is the slope of the stress-strain curve, which is a straight line, in the elastic region.
Since one end of this line is at the origin, the slope (modulus of elasticity) is
E
S el
ε el
E 10.3 10
6 psi E 71 GPa
2. The strain energy per unit volume at the elastic limit is the area under the stress-strain curve up to the elastic limit. Since the curve is a straight line up to this limit, the area is one-half the base times the height, or
U' el
1
2
S el
ε el
U' el
82.4
lbf in in
3
U' el
568 kN m m
3
The total strain energy in the specimen is the strain energy per unit volume times the volume,
U el
U' el
π d o
2
4
L o
U el
33.0
in lbf
3. Based on the modulus of elasticity and using Table C-1, the material is aluminum .
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 2-8
2-8-1
Statement:
Given:
A metal has a strength of 134 MPa at its elastic limit and the strain at that point is 0.006. What is the modulus of elasticity? What is the strain energy at the elastic limit? Assume that the test speimen is 12.8-mm dia and has a 50-mm gage length. Can you define the type of metal based on the given data?
Elastic limit: Strength S el
134 MPa Strain ε el
0.003
Test specimen: Diameter d o
12.8
mm Length L o
50 mm
Solution: See Mathcad file P0208.
1. The modulus of elasticity is the slope of the stress-strain curve, which is a straight line, in the elastic region.
Since one end of this line is at the origin, the slope (modulus of elasticity) is
E
S el
ε el
E 45 GPa
2. The strain energy per unit volume at the elastic limit is the area under the stress-strain curve up to the elastic limit. Since the curve is a straight line up to this limit, the area is one-half the base times the height, or
U' el
1
2
S el
ε el
U' el
201 kN m m
3
The total strain energy in the specimen is the strain energy per unit volume times the volume,
U el
U' el
π d o
2
4
L o
U el
1.3
N m
3. Based on the modulus of elasticity and using Table C-1, the material is magnesium .
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 2-9
2-9-1
Statement:
Given:
A metal has a strength of 100 kpsi (689 MPa) at its elastic limit and the strain at that point is
0.006. What is the modulus of elasticity? What is the strain energy at the elastic limit?
Assume that the test speimen is 0.505-in dia and has a 2-in gage length. Can you define the type of metal based on the given data?
Elastic limit: Strength S el
S el
Test specimen: Diameter d o
100 ksi
689 MPa
0.505
in
Strain
Length
ε
L el o
0.006
2.00
in
Solution: See Mathcad file P0209.
1. The modulus of elasticity is the slope of the stress-strain curve, which is a straight line, in the elastic region.
Since one end of this line is at the origin, the slope (modulus of elasticity) is
E
S el
ε el
E 16.7 10
6 psi E 115 GPa
2. The strain energy per unit volume at the elastic limit is the area under the stress-strain curve up to the elastic limit. Since the curve is a straight line up to this limit, the area is one-half the base times the height, or
U' el
1
2
S el
ε el
U' el
300 lbf in in
3
U' el
2 10
3 kN m m
3
The total strain energy in the specimen is the strain energy per unit volume times the volume,
U el
U' el
π d o
2
4
L o
U el
120.18
in lbf
3. Based on the modulus of elasticity and using Table C-1, the material is titanium .
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-10-1
PROBLEM 2-10
Statement: A material has a yield strength of 689 MPa at an offset of 0.6% strain. What is its modulus of resilience?
Units: MJ 10
6 joule
Given: Yield strength S y
689 MPa
Yield strain ε y
0.006
Solution: See Mathcad file P0210.
1. The modulus of resilience (strain energy per unit volume) is given by Equation (2.7) and is approximately
U
R
1
2
S y
ε y
U
R
2.067
MJ m
3
U
R
2.1
MPa
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 2-11
2-11-1
Statement:
Units:
Given:
A material has a yield strength of 60 ksi (414 MPa) at an offset of 0.2% strain. What is its modulus of resilience?
MJ 10
6 joule
Yield strength S y
60 ksi S y
414 MPa
Yield strain ε y
0.002
Solution: See Mathcad file P0211.
1. The modulus of resilience (strain energy per unit volume) is given by Equation (2.7) and is approximately
U
R
1
2
S y
ε y
U
R
60 in lbf in
3
U
R
0.414
MJ m
3
U
R
0.414
MPa
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 2-12
Statement: A steel has a yield strength of 414 MPa, an ultimate tensile strength of 689 MPa, and an elongation at fracture of 15%. What is its approximate modulus of toughness? What is the approximate modulus of resilience?
2-12-1
ε f
0.15
Given:
Solution:
S y
414 MPa
See Mathcad file P0212.
S ut
689 MPa
1. Determine the modulus of toughness using Equation (2.8).
U
T
S y
2
S ut
ε f
U
T
82.7
MN m m
3
U
T
82.7
MPa
2. Determine the modulus of resilience using Equation (2.7) and Young's modulus for steel: E 207 GPa
U
R
1
2
S y
2
E
U
R
414 kN m m
3
U
R
0.41
MPa
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-13-1
PROBLEM 2-13
Statement: The Brinell hardness of a steel specimen was measured to be 250 HB. What is the material's approximate tensile strength? What is the hardness on the Vickers scale? The Rockwell scale?
Given: Brinell hardness of specimen HB 250
Solution: See Mathcad file P0213.
1. Determine the approximate tensile strength of the material from equations (2.10), not Table 2-3.
S ut
0.5
HB ksi S ut
125 ksi S ut
2. From Table 2-3 (using linear interpolation) the hardness on the Vickers scale is
862 MPa
HV
HB 241
277 241
( 292 253 ) 253 HV
3. From Table 2-3 (using linear interpolation) the hardness on the Rockwell C scale is
263
HRC
HB 241
277 241
( 28.8
22.8
) 22.8
HRC 24.3
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-14-1
PROBLEM 2-14
Statement: The Brinell hardness of a steel specimen was measured to be 340 HB. What is the material's approximate tensile strength? What is the hardness on the Vickers scale? The Rockwell scale?
Given: Brinell hardness of specimen HB 340
Solution: See Mathcad file P0214.
1. Determine the approximate tensile strength of the material from equations (2.10), not Table 2-3.
S ut
0.5
HB ksi S ut
170 ksi S ut
2. From Table 2-3 (using linear interpolation) the hardness on the Vickers scale is
1172 MPa
HV
HB 311
341 311
( 360 328 ) 328 HV
3. From Table 2-3 (using linear interpolation) the hardness on the Rockwell C scale is
359
HRC
HB 311
341 311
( 36.6
33.1
) 33.1
HRC 36.5
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-15-1
PROBLEM 2-15
Statement: What are the principal alloy elements of an AISI 4340 steel? How much carbon does it have? Is it hardenable? By what techniques?
Solution: See Mathcad file P0215.
1. Determine the principal alloying elements from Table 2-5 for 43xx steel..
1.82% Nickel
0.50 or 0.80% Chromium
0.25% Molybdenum
2. From "Steel Numbering Systems" in Section 2.6, the carbon content is
From the last two digits, the carbon content is 0.40%.
3. Is it hardenable? Yes, all of the alloying elements increase the hardenability. By what techniques? It can be through hardened by heating, quenching and tempering; and it can also be case hardened (See Section 2.4).
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-16-1
PROBLEM 2-16
Statement: What are the principal alloy elements of an AISI 1095 steel? How much carbon does it have? Is it hardenable? By what techniques?
Solution: See Mathcad file P0216.
1. Determine the principal alloying elements from Table 2-5 for 10xx steel.
Carbon only, no alloying elements
2. From "Steel Numbering Systems" in Section 2.6, the carbon content is
From the last two digits, the carbon content is 0.95%.
3. Is it hardenable? Yes, as a high-carbon steel, it has sufficient carbon content for hardening. By what techniques? It can be through hardened by heating, quenching and tempering; and it can also be case hardened (See Section 2.4).
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-17-1
PROBLEM 2-17
Statement: What are the principal alloy elements of an AISI 6180 steel? How much carbon does it have? Is it hardenable? By what techniques?
Solution: See Mathcad file P0217.
1. Determine the principal alloying elements from Table 2-5 for 61xx steel..
0.15% Vanadium
0.60 to 0.95% Chromium
2. From "Steel Numbering Systems" in Section 2.6, the carbon content is
From the last two digits, the carbon content is 0.80%.
3. Is it hardenable? Yes, all of the alloying elements increase the hardenability. By what techniques? It can be through hardened by heating, quenching and tempering; and it can also be case hardened (See Section 2.4).
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-18-1
PROBLEM 2-18
Statement: Which of the steels in Problems 2-15, 2-16, and 2-17 is the stiffest?
Solution: See Mathcad file P0218.
1. None. All steel alloys have the same Young's modulus, which determines stiffness.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-19-1
PROBLEM 2-19
Statement: Calculate the specific strength and specific stiffness of the following materials and pick one for use in an aircraft wing spar.
Given: Material Code Ultimate Strength Young's Modulus Weight Density
Steel
Aluminum st 0 al 1
Sut st
Sut al
80 ksi
60 ksi
E st
E al
30 10
6 psi
10.4 10
6 psi
γ
γ st al
0.28
lbf
0.10
in
3 lbf in
3
Titanium ti 2 Sut ti
90 ksi E ti
16.5 10
6 psi γ ti
0.16
lbf in
3
Index i 0 1 2
Solution: See Mathcad file P0219.
1. Specific strength is the ultimate tensile strength divided by the weight density and specific stiffness is the modulus of elasticity divided by the weight density. The text does not give a symbol to these quantities.
Specific strength
Sut i 1
γ i in
286·10 3
600·10 3
563·10 3
Specific stiffness
Steel
Aluminum
Titanium
E i
γ i
1 in
107·10 6
104·10 6
103·10 6
2. Based on the results above, all three materials have the same specific stiffness but the aluminum has the largest specific strength. Aluminum for the aircraft wing spar is recommended.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-20-1
PROBLEM 2-20
Statement: If maximum impact resistance were desired in a part, which material properties would you look for?
Solution: See Mathcad file P0220.
1. Ductility and a large modulus of toughness (see "Impact Resistance" in Section 2.1).
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-21-1
PROBLEM 2-21 _____
Statement: Refer to the tables of material data in Appendix A and determine the strength-to-weight ratios of the following material alloys based on their tensile yield strengths: heat-treated 2024 aluminum,
SAE 1040 cold-rolled steel, Ti-75A titanium, type 302 cold-rolled stainless steel.
Given: Material
Mat
1
Yield Strength
"2024 Aluminum, HT" Sy
1
290 MPa
Mat
2
"1040 CR Steel" Sy
2
490 MPa
Mat
3
"Ti-75A Titanium" Sy
3
517 MPa
Mat
4
"Type 302 CR SS" Sy
4
1138 MPa
Specific Weight
γ
1
0.10
lbf in
3
γ
2
0.28
lbf in
3
γ
3
0.16
lbf in
3
γ
4
0.28
lbf in
3
γ
1
γ
2
γ
3
γ
4
27.14
76.01
m
3 kN
43.43
m
3 kN
76.01
m
3 kN m
3 kN
Solution:
1.
i 1 2 4
See Mathcad file P0221.
Calculate the strength-to-weight ratio for each material as described in Section 2.1.
SWR i
Sy i
γ i
Mat i
"2024 Aluminum, HT"
"1040 CR Steel"
"Ti-75A Titanium"
"Type 302 CR SS"
SWR i
10
4 m
1.068
0.645
1.190
1.497
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-22-1
PROBLEM 2-22 _____
Statement: Refer to the tables of material data in Appendix A and determine the strength-to-weight ratios of the following material alloys based on their ultimate tensile strengths: heat-treated 2024 aluminum
SAE 1040 cold-rolled steel, unfilled acetal plastic, Ti-75A titanium, type 302 cold-rolled stainless steel.
Given: Material Tensile Strength
Mat
1
Mat
2
Mat
3
Mat
4
"2024 Aluminum, HT" Sut
"1040 CR Steel"
"Acetal, unfilled"
Mat
5
"Type 302 CR SS" i 1 2 5
Sut
Sut
3
"Ti-75A Titanium" Sut
4
Sut
1
2
5
See Mathcad file P0222.
441
586
60.7
586
1310
MPa
MPa
MPa
MPa
MPa
Specific Weight
γ
γ
γ
γ
γ
1
2
3
4
5
0.10
lbf in
3
γ
1
0.28
lbf in
0.051
lbf in
3
γ
2
3
γ
3
0.16
lbf in
3
γ
4
0.28
lbf in
Solution:
1. Calculate the strength-to-weight ratio for each material as described in Section 2.1.
3
γ
5
27.14
kN m
3
76.01
kN m
3
13.84
kN m
3
43.43
kN m
3
76.01
kN m
3
SWR i
Sut i
γ i
Mat i
"2024 Aluminum, HT"
"1040 CR Steel"
"Acetal, unfilled"
"Ti-75A Titanium"
"Type 302 CR SS"
SWR i
10
4 m
1.625
0.771
0.438
1.349
1.724
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 2-23 _____
Statement:
Units:
Refer to the tables of material data in Appendix A and calculate the specific stiffness of aluminum, titanium, gray cast iron, ductile iron, bronze, carbon steel, and stainless steel.
Rank them in increasing order of this property and discuss the engineering significance of these data.
Mg 10
3 kg
Given: Material
Mat
1
"Aluminum"
"Titanium" Mat
2
Mat
3
"Gray cast iron"
Mat
4
Mat
5
"Ductile iron"
"Bronze"
Mat
6
Mat
7
"Carbon steel"
"Stainless steel" i 1 2 7
Modulus of Elasticity
E
1
71.7
GPa
113.8
GPa E
2
E
3
103.4
GPa
168.9
GPa
E
6
E
7
E
4
E
5
110.3
206.8
189.6
GPa
GPa
GPa
Solution: See Mathcad file P0223.
1. Calculate the specific stiffness for each material as described in Section 2.1.
ρ
1
Density
2.8
Mg m
3
ρ
2
4.4
Mg m
3
ρ
3
7.2
Mg m
3
ρ
4
6.9
Mg m
3
ρ
5
8.6
Mg m
3
ρ
6
7.8
Mg m
3
ρ
7
7.8
Mg m
3
E' i
E i
ρ i
Mat i
2. Rank them in increasing order of specific stiffness.
Mat
Mat
Mat
5
3
7
"Bronze"
"Gray cast iron"
"Stainless steel"
E'
5
10
6
E'
3
10
6 m
2 s
2 m
2 s
2
E'
7
10
6 s
2 m
2
12.8
14.4
24.3
"Aluminum"
"Titanium"
"Gray cast iron"
"Ductile iron"
"Bronze"
"Carbon steel"
"Stainless steel"
E' i s
2
10
6 m
2
25.6
25.9
14.4
24.5
12.8
26.5
24.3
2-23-1
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-23-2
Mat
Mat
Mat
Mat
4
1
2
6
"Ductile iron"
"Aluminum"
"Titanium"
"Carbon steel"
E'
4
10
6
E'
1 s
2 m
2 s
2
10
6
E'
2 m
2 s
2
10
6 m
2
E'
6
10
6 s
2 m
2
24.5
25.6
25.9
26.5
3. Bending and axial deflection are inversely proportional to the modulus of elasticity. For the same shape and dimensions, the material with the highest specific stiffness will give the smallest deflection. Or, put another way, for a given deflection, using the material with the highest specific stiffness will result in the least weight.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-24-1
PROBLEM 2-24
Statement: Call your local steel and aluminum distributors (consult the Yellow Pages) and obtain current costs per pound for round stock of consistent size in low-carbon (SAE 1020) steel, SAE 4340 steel, 2024-T4 aluminum, and 6061-T6 aluminum. Calculate a strength/dollar ratio and a stiffness/dollar ratio for each alloy. Which would be your first choice on a cost-efficiency basis for an axial-tension-loaded round rod
(a) If maximum strength were needed?
(b) If maximum stiffness were needed?
Solution: Left to the student as data will vary with time and location.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-25-1
PROBLEM 2-25
Statement: Call your local plastic stock-shapes distributors (consult the Yellow Pages) and obtain current costs per pound for round rod or tubing of consistent size in plexiglass, acetal, nylon 6/6, and
PVC. Calculate a strength/dollar ratio and a stiffness/dollar ratio for each alloy. Which would be your first choice on a cost-efficiency basis for an axial-tension-loaded round rod or tube of particular diameters.
(a) If maximum strength were needed?
(b) If maximum stiffness were needed?
Solution: Left to the student as data will vary with time and location.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-26-1
PROBLEM 2-26
Statement: A part has been designed and its dimensions cannot be changed. To minimize its deflections under the same loading in all directions irrespective of stress levels, which material woulod you choose among the following: aluminum, titanium, steel, or stainless steel?
Solution: See Mathcad file P0226.
1. Choose the material with the highest modulus of elasticity because deflection is inversely proportional to modulus of elasticity. Thus, choose steel unless there is a corrosive atmosphere, in which case, choose stainless steel.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 2-27
2-27-1
Statement: Assuming that the mechanical properties data given in Appendix Table A-9 for some carbon steels represents mean values, what is the value of the tensile yield strength for 1050 steel quenched and tempered at 400F if a reliability of 99.9% is required?
Given: Mean yield strength S y
117 ksi S y
807 MPa
Solution: See Mathcad file P0227.
1. From Table 2-2 the reliability factor for 99.9% is Re 0.753. Applying this to the mean tensile strength gives
S y99.9
S y
Re S y99.9
88.1
ksi S y99.9
607 MPa
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-28-1
PROBLEM 2-28
Statement: Assuming that the mechanical properties data given in Appendix Table A-9 for some carbon steels represents mean values, what is the value of the ultimate tensile strength for 4340 steel quenched and tempered at 800F if a reliability of 99.99% is required?
Given:
Solution:
Mean ultimate tensile strength
See Mathcad file P0228.
S ut
213 ksi S ut
1469 MPa
1. From Table 2-2 the reliability factor for 99.99% is Re 0.702. Applying this to the mean ultimate tensile strength gives
S ut99.99
S ut
Re S ut99.99
150 ksi S ut99.99
1031 MPa
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-29-1
PROBLEM 2-29
Statement: Assuming that the mechanical properties data given in Appendix Table A-9 for some carbon steels represents mean values, what is the value of the ultimate tensile strength for 4130 steel quenched and tempered at 400F if a reliability of 90% is required?
Given:
Solution:
Mean ultimate tensile strength
See Mathcad file P0229.
S ut
236 ksi S ut
1627 MPa
1. From Table 2-2 the reliability factor for 90% is Re 0.897. Applying this to the mean ultimate tensile strength gives
S ut99.99
S ut
Re S ut99.99
212 ksi S ut99.99
1460 MPa
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-30-1
PROBLEM 2-30
Statement: Assuming that the mechanical properties data given in Appendix Table A-9 for some carbon steels represents mean values, what is the value of the tensile yield strength for 4140 steel quenched and tempered at 800F if a reliability of 99.999% is required?
Given:
Solution:
Mean yield strength
See Mathcad file P0230.
S y
165 ksi S y
1138 MPa
1. From Table 2-2 the reliability factor for 99.999% is Re 0.659. Applying this to the mean tensile strength gives
S y99.9
S y
Re S y99.9
109 ksi S y99.9
750 MPa
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-31-1
PROBLEM 2-31
Statement: A steel part is to be plated to give it better corrosion resistance. Two materials are being considered: cadmium and nickel. Considering only the problem of galvanic action, which would you chose? Why?
Solution: See Mathcad file P0231.
1. From Table 2-4 we see that cadmium is closer to steel than nickel. Therefore, from the standpoint of reduced galvanic action, cadmium is the better choice. Also, since cadmium is less noble than steel it will be the material that is consumed by the galvanic action. If nickel were used the steel would be consumed by galvanic action.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-32-1
PROBLEM 2-32
Statement: A steel part with many holes and sharp corners is to be plated with nickel. Two processes are being considered: electroplating and electroless plating. Which process would you chose? Why?
Solution: See Mathcad file P0232.
1. Electroless plating is the better choice since it will give a uniform coating thickness in the sharp corners and in the holes. It also provides a relatively hard surface of about 43 HRC.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-33-1
PROBLEM 2-33
Statement: What is the common treatment used on aluminum to prevent oxidation? What other metals can also be treated with this method? What options are available with this method?
Solution: See Mathcad file P0233.
1. Aluminum is commonly treated by anodizing, which creates a thin layer of aluminum oxide on the surface.
Titanium, magnesium, and zinc can also be anodized. Common options include tinting to give various colors to the surface and the use of "hard anodizing" to create a thicker, harder surface.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-34-1
PROBLEM 2-34
Statement: Steel is often plated with a less nobel metal that acts as a sacrificial anode that will corrode instead of the steel. What metal is commonly used for this purpose (when the finished product will not be exposed to saltwater), what is the coating process called, and what are the common processes used to obtain the finished product?
Solution: See Mathcad file P0234.
1. The most commonly used metal is zinc. The process is called "galvanizing" and it is accomplished by electroplating or hot dipping.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 2-35
Statement: A low-carbon steel part is to be heat-treated to increase its strength. If an ultimate tensile strength of approximately 550 MPa is required, what mean Brinell hardness should the part have after treatment? What is the equivalent hardness on the Rockwell scale?
Given: Approximate tensile strength S ut
550 MPa
2-35-1
Solution: See Mathcad file P0235.
1. Use equation (2.10), solving for the Brinell hardness, HB.
S ut
= 3.45
HB HB
S ut
3.45
MPa
HB 159
2. From Table 2-3, the equivalent hardness on the Rocwell scale is 83.9HRB.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-36-1
PROBLEM 2-36
Statement: A low-carbon steel part has been tested for hardness using the Brinell method and is found to have a hardness of 220 HB. What are the approximate lower and upper limits of the ultimate tensile strength of this part in MPa?
Given: Hardness HB 220
Solution: See Mathcad file P0236.
1. Use equation (2.10), solving for ultimate tensile strength.
Minimum: S utmin
( 3.45
HB 0.2
HB ) MPa S utmin
715 MPa
Maximum: S utmax
( 3.45
HB 0.2
HB ) MPa S utmax
803 MPa
MACHINE DESIGN - An Integrated Approach, 4th Ed.
I b
I s
Index S yb
ρ b
Index S ys
ρ s
I b
13.4
I s
10.2
2-37-1
PROBLEM 2-37
Statement:
Units:
Figure 2-24 shows "guide lines" for minimum weight design when failure is the criterion. The guide line, or index, for minimizing the weight of a beam in bending is f
2/3 / , where f
is the yield strength of a material and is its mass density. For a given cross-section shape the weight of a beam with given loading will be minimized when this index is maximized. The following materials are being considered for a beam application: 5052 aluminum, cold rolled;
CA-170 beryllium copper, hard plus aged; and 4130 steel, Q & T @ 1200F. The use of which of these three materials will result in the least-weight beam?
Mg kg
3
Given: 5052 Aluminum S ya
CA-170 beryllium copper S yb
4130 steel S ys
255 MPa
1172 MPa
703 MPa
ρ a
2.8
Mg m
3
ρ b
8.3
Mg m
ρ s
3
7.8
Mg m
3
Solution: See Mathcad file P0237.
1. The values for the mass density are taken from Appendix Table A-1 and the values of yield strength come from from Tables A-2, A-4, and A-9 for aluminum, beryllium copper, and steel, respectively.
2. Calculate the index value for each material.
Index S y
ρ
S y
0.667
ρ
Mg m
3
MPa
0.667
Aluminum I a
Index S ya
ρ a
I a
14.4
Beryllium copper
Steel
The 5052 aluminum has the highest value of the index and would be the best choice to minimize weight.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-38-1
PROBLEM 2-38
Statement:
Units:
Figure 2-24 shows "guide lines" for minimum weight design when failure is the criterion. The guide line, or index, for minimizing the weight of a member in tension is f
/ , where f
is the yield strength of a material and is its mass density. The weight of a member with given loading will be minimized when this index is maximized. For the three materials given in Problem
2-37, which will result in the least weight tension member?
Mg kg
3
Given: 5052 Aluminum S ya
CA-170 beryllium copper S yb
4130 steel S ys
255 MPa
1172 MPa
703 MPa
ρ a
2.8
Mg m
ρ b
3
8.3
Mg m
3
ρ s
7.8
Mg m
3
Solution: See Mathcad file P0238.
1. The values for the mass density are taken from Appendix Table A-1 and the values of yield strength come from from Tables A-2, A-4, and A-9 for aluminum, beryllium copper, and steel, respectively.
2. Calculate the index value for each material.
Index S y
ρ
S y
ρ
Mg m
MPa
3
Aluminum I a
Index S ya
ρ a
I a
91.1
Beryllium copper
Steel
I b
I s
Index S yb
ρ b
Index S ys
ρ s
I b
141.2
I s
90.1
The beryllium copper has the highest value of the index and would be the best choice to minimize weight.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
I b
I s
Index E b
ρ b
Index E s
ρ s
I b
1.4
I s
1.8
2-39-1
PROBLEM 2-39
Statement: Figure 2-23 shows "guide lines" for minimum weight design when stiffness is the criterion. The guide line, or index, for minimizing the weight of a beam in bending is E 1/2 / , where E is the modulus of elasticity of a material and is its mass density. For a given cross-section shape the weight of a beam with given stiffness will be minimized when this index is maximized. The following materials are being considered for a beam application: 5052 aluminum, cold rolled;
CA-170 beryllium copper, hard plus aged; and 4130 steel, Q & T @ 1200F. The use of which of these three materials will result in the least-weight beam?
Units: Mg kg
3
Given: 5052 Aluminum E a
CA-170 beryllium copper E b
4130 steel E s
71.7
GPa
127.6
GPa
206.8
GPa
ρ a
2.8
Mg m
3
ρ b
8.3
Mg m
ρ s
3
7.8
Mg m
3
Solution: See Mathcad file P0239.
1. The values for the mass density and modulus are taken from Appendix Table A-1.
2. Calculate the index value for each material.
Index E ρ )
E
0.5
ρ
Mg m
GPa
0.5
3
Aluminum I a
Index E a
ρ a
I a
3.0
Beryllium copper
Steel
The 5052 aluminum has the highest value of the index and would be the best choice to minimize weight.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
2-40-1
PROBLEM 2-40
Statement: Figure 2-24 shows "guide lines" for minimum weight design when stiffness is the criterion. The guide line, or index, for minimizing the weight of a member in tension is E / , where E is the modulus of elasticity of a material and is its mass density. The weight of a member with given stiffness will be minimized when this index is maximized. For the three materials given in Problem
2-39, which will result in the least weight tension member?
Units: Mg kg
3
Given: 5052 Aluminum E a
CA-170 beryllium copper E b
4130 steel E s
71.7
GPa
127.6
GPa
206.8
GPa
ρ a
2.8
Mg m
ρ b
3
8.3
Mg m
3
ρ s
7.8
Mg m
3
Solution: See Mathcad file P0240.
1. The values for the mass density and modulus are taken from Appendix Table A-1.
2. Calculate the index value for each material.
Index E ρ )
E
ρ
Mg m
GPa
3
Aluminum I a
Index E a
ρ a
I a
25.6
Beryllium copper
Steel
I b
I s
Index E b
ρ b
Index E s
ρ s
I b
15.4
I s
26.5
The steel has the highest value of the index and would be the best choice to minimize weight.
MACHINE DESIGN - An Integrated Approach, 4th Ed.
3-1-1
PROBLEM 3-1
Statement: Which load class from Table 3-1 best suits these systems?
(a) Bicycle frame
(b) Flag pole
(c) Boat oar
(d) Diving board
(e) Pipe wrench
(f) Golf club.
Solution: See Mathcad file P0301.
1. Determine whether the system has stationary or moving elements, and whether the there are constant or time-varying loads.
(a) Bicycle frame Class 4 (Moving element, time-varying loads)
(b) Flag pole Class 2 (Stationary element, time-varying loads)
(c) Boat oar Class 2 (Low acceleration element, time-varying loads)
(d) Diving board Class 2 (Stationary element, time-varying loads)
(e) Pipe wr ench Class 2 (Low acceleration elements, time-varying loads)
(f) Golf club Class 4 (Moving element, time-varying loads)
MACHINE DESIGN - An Integrated Approach, 4th Ed.
3-2a-1
PROBLEM 3-2a
Statement: Draw free-body diagrams for the system of Problem 3-1a (bicycle frame).
Assumptions: 1. A two-dimensional model is adequate.
2. The lower front-fork bearing at C takes all of the thrust load from the front forks.
3. There are no significant forces on the handle bars.
Solution: See Mathcad file P0302a.
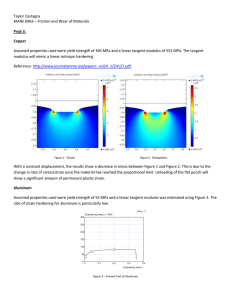
1. A typical bicycle frame is shown in Figure 3-2a. There are five points on the frame where external forces and moments are present. The rider's seat is mounted through a tube at A. This is a rigid connection, capable of transmitting two force components and a moment. The handle bars and front-wheel forks are supported by the frame through two bearings, located at B and C. These bearings are capable of transmitting radial and axial loads. The pedal-arm assembly is supported by bearings at D. These bearings are capable of transmitting radial loads. The rear wheel-sprocket assembly is supported by bearings mounted on an axle fixed to the frame at E.
F ax
M a A
R a
R b
F br
R c
B
F ct
F cr
α
F ay
C
R d
R e
F ey
F ex
E
F dx
D
F dy
FIGURE 3-2a
Free Body Diagram for Problem 3-2a
2. The loads at B and C can be determined by analyzing a FBD of the front wheel-front forks assembly. The loads at D can be determined by analyzing a FBD of the pedal-arm and front sprocket (see Problem 3-3), and the loads at E can be determined by analyzing a FBD of the rear wheel-sprocket assembly.
3. With the loads at B, C, D, and E known, we can apply equations 3.3b to the FBD of the frame and solve for F ax
,
F ay
, and M a
.
Σ F x
:
Σ F y
:
Σ M z
:
− F ax
− F br
⋅ cos α + F cr
⋅ cos α − F ct
⋅ sin α − F dx
+ F ex
= 0
− F ay
− F br
⋅ sin α + F cr
⋅ sin α + F ct
⋅ cos α − F dy
+ F ey
= 0
M a
+
(
+
R dx
(
⋅
R bx
F dy
⋅ F
− by
−
R dy
⋅
R by
F dx
⋅ F bx
+
(
)
)
R
+
(
R cx
⋅ ex
⋅ F ey
F cy
−
− R cy
⋅ F cx
R ey
⋅ F ex
)
)
...
= 0
(1)
(2)
(3)
MACHINE DESIGN - An Integrated Approach, 4th Ed.
3-2e-1
PROBLEM 3-2e
Statement: Draw free-body diagrams for the system of Problem 3-1e (pipe wrench).
Assumptions: A two-dimensional model is adequate.
Solution: See Mathcad file P0302e.
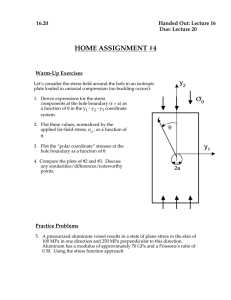
1. A typical pipe wrench with a pipe clamped in its jaw is shown in Figure 3-2e(a). When a force F hand
is applied on the wrench, the piping system provides an equal and opposite force and a resisting torque, T pipe
.
F hand
F hand
T pipe a
(a) FBD of pipe wrench and pipe
F bt
F bn
F ax
A
F ay
α d b
(b) FBD of pipe wrench only
FIGURE 3-2e
Free Body Diagrams for Problem 3-2e
2. The pipe reacts with the wrench at the points of contact A and B. The forces here will be directed along the common normals and tangents. The jaws are slightly tapered and, as a result, the action of F hand
tends to drive the wrench further into the taper, increasing the normal forces. This, in turn, allows for increasing tangential forces. It is the tangential forces that produce the turning torque.
3. Applying equations 3.3b to the FBD of the pipe wrench,
Σ F x
:
Σ F y
:
Σ M
A
:
− F ax
+ F bn
⋅ cos α − F bt
⋅ sin α = 0
− F ay
+ F bn
⋅ sin α + F bt
⋅ cos α − F hand
= 0
⋅ ( bt
⋅ cos α + F bn
⋅ sin α
)
− ( d + a ⋅ hand
= 0
4. These equations can be solved for the vertical forces if we assume α is small so that sin( α ) = 0 and cos ( α ) = 1.
(1)
(2)
(3)
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 3-3
Statement:
3-3-1
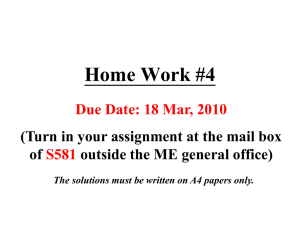
Draw a free-body diagram of the pedal-arm assembly from a bicycle with the pedal arms in the horizontal position and dimensions as shown in Figure P3-1. (Consider the two arms, pedals and pivot as one piece). Assuming a rider-applied force of 1500 N at the pedal, determine the torque applied to the chain sprocket and the maximum bending moment and torque in the pedal arm.
Given: a 170 mm b 60 mm F rider
1.5
kN
Assumptions: The pedal-arm assembly is supprted by bearings at A and at B .
Solution: See Figure 3-3 and Mathcad file P0303.
1. The free-body diagram (FBD) of the pedal-arm assembly (including the sprocket) is shown in Figure 3-3a. The rider-applied force is F rider
and the force applied by the chain (not shown) is F chain
. The radial bearing reactions are F ax
, F az
, F bx
, and F bz
. Thus, there are five unknowns F chain
, F ax
, F az
, F bx
, and F bz
. In general, we can write six equilibrium equations for a three-dimensional force system, but in this system there are no forces in the y-direction so five equations are available to solve for the unknowns.
z a
F az
F chain
Sprocket
F bz
F rider b
Arm
A
B Arm (sectioned)
F ax
F bx y
Pedal x
(a) FBD of complete pedal-arm assembly z a
T c
F rider b
M c
Arm
F c y
Pedal x
(b) FBD of pedal and arm with section through the origin
FIGURE 3-3
Dimensions and Free Body Diagram of the pedal-arm assembly for Problem 3-3
2. The torque available to turn the sprocket is found by summing moments about the sprocket axis. From Figure
3-3a, it is
MACHINE DESIGN - An Integrated Approach, 4th Ed.
3-3-2
T y-axis
: a F rider r F chain
= a F rider
T sprocket
= 0
T sprocket a F rider
T sprocket
255 N m where r is the sprocket pitch radius.
3. In order to determine the bending moment and twisting torque in the pedal arm, we will cut the arm with a section plane that goes through the origin and is parallel to the y-z plane, removing everything beyond that plane and replacing it with the internal forces and moments in the pedal arm at the section. The resulting
FBD is shown in Figure 3-3 b . The internal force at section C is F c
the internal bending moment is M c
, and the internal twisting moment (torque) is T c
. We can write three equilibrium equations to solve for these three unknowns:
Shear force in pedal arm at section C
F z
: F c
F rider
= 0
Bending moment in pedal arm at section C
F c
F rider
F c
1.5
kN
M y-axis
: a F rider
M c
= 0 M c a F rider
M c
255 N m
Twisting moment in pedal arm at section C
M x-axis
: b F rider
T c
= 0 T c b F rider
T c
90 N m
MACHINE DESIGN - An Integrated Approach,4th Ed.
PROBLEM 3-4
Statement:
3-4-1
The trailer hitch from Figure 1-1 has loads applied as shown in Figure P3-2. The tongue weight of 100 kg acts downward and the pull force of 4905 N acts horizontally. Using the dimensions of the ball bracket in Figure 1-5 (p. 15), draw a free-body diagram of the ball bracket and find the tensile and shear loads applied to the two bolts that attach the bracket to the channel in Figure
1-1.
Given: a 40 mm
M tongue b 31 mm
100 kg F pull
4.905
kN t c 70
19 mm mm d
Assumptions: 1. The nuts are just snug-tight (no pre-load), which is the worst case.
2. All reactions will be concentrated loads rather than distributed loads or pressures.
Solution: See Figure 3-4 and Mathcad file P0304.
20 mm
1. The weight on the tongue is
W tongue
M tongue g W tongue
0.981
kN
2. The FBD of the hitch and bracket assembly is shown in Figure 3-4. The known external forces that act on the ball are F pull
and W tongue
. The reactions on the bracket are at points C and D . The bolts at C provide tensile
( F c 2 x
) and shear ( F c 2 y
) forces, and the bracket resists rotation about point D where the reaction force F d 2
is applied by the channel to which the bracket is bolted.
3. Solving for the reactions by summing the horizontal and vertical forces and the moments about D :
F x
:
F y
:
M
D
:
F pull
F c2y
F c2x
W tongue
= 0
F c2x d F pull
F d2
= 0
( a t b d ) W tongue c = 0
(1)
(2)
(3)
W tongue
70 = c
1 F pull
1
D
C
2
B
A
40 = a
19 = t
31 = b
20 = d
F c2x
F d2
C
D
F c2y
2
B
FIGURE 3-4
Dimensions and Free Body Diagram for Problem 3-4
4. Solving equation (3) for F c 2 x
MACHINE DESIGN - An Integrated Approach,4th Ed.
F c2x
F pull
( a t b d ) W tongue c d
5. Substituting into (1) and solving for F d 2
F d2
6. Solving (2) for F c2y
F c2x
F pull
F
F c2x d2
30.41
25.505
kN kN
F c2y
W tongue
F c2y
0.981
kN
7. The loads applied to the two bolts that attach the bracket to the channel are:
Axial force on two bolts
Shear force on two bolts
F c2x
30.4
kN
F c2y
0.98
kN
We assume that each bolt would carry one half of these loads.
3-4-2
(4)
(5)
(6)
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 3-5
Statement:
3-5-1
For the trailer hitch of Problem 3-4, determine the horizontal force that will result on the ball from accelerating a 2000-kg trailer to 60 m/sec in 20 sec.
Given: Mass of trailer
Final velocity
Time to reach velocity
M trailer
2000 kg v f
60 m sec
τ 20 sec
Assumptions: 1. Acceleration is constant.
2. The rolling resistance of the tires and the wheel bearings is negligible.
Solution: See Mathcad file P0305.
1. From elementary kinematics, the acceleration required is a v
τ f a 3.00
m sec
2
2. Using Newton's second law to find the force required to accelerate the trailer,
(1)
F hitch
M trailer a F hitch
6.00
kN (2)
MACHINE DESIGN - An Integrated Approach, 4th Ed.
3-6-1
PROBLEM 3-6
Statement: For the trailer hitch of Problem 3-4, determine the horizontal force that will result on the ball from an impact between the ball and the tongue of the 2000-kg trailer if the hitch deflects 2.8 mm dynamically on impact. The tractor weighs 1000 kg. The velocity at impact is 0.3 m/sec.
Given: Mass of trailer
Dynamic deflection
Mass of tractor
Impact velocity
M trailer
δ i
2000 kg
2.8
mm
M tractor
1000 kg v i
0.3
m sec
Assumptions: 1. The tractor is the "struck member" because the hitch is on the tractor and it is the hitch that deflects.
2. Equations (3.9) and (3.10) can be used to model the impact.
Solution: See Mathcad file P0306.
1. The weight of the trailer (the "striking member") is
W trailer
M trailer g
2. The correction factor, from equation (3-15), is
η
1
1
M tractor
3 M trailer
W trailer
19.613
kN
η 0.857
3. Eliminating E from equations (3.9a) and (3.10) and solving for the horizontal force on the ball F i
yields
1
2
F i
δ i
= η
1
2
M trailer v i
2
F i
η M trailer v i
2
δ i
F i
55.1
kN
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 3-7
Statement: The piston of an internal-combustion engine is connected to its connecting rod with a "wrist pin." Find the force on the wrist pin if the 0.5-kg piston has an acceleration of 2 500 g.
3-7-1
Given: Mass of piston
Acceleration of piston
M piston a piston
0.5
kg
2500 g
Assumptions: The force on the wrist pin due to the weight of the piston is very small compared with the acceleration force.
Solution: See Mathcad file P0307.
1. The acceleration in m/s is a piston
2.452
10
4 m sec
2
2. Using Newton's Second Law expressed in equation (3.1
a ), the force on the wrist pin is
F wristpin
M piston a piston
F wristpin
12.258
kN
MACHINE DESIGN - An Integrated Approach, 4th Ed.
3-8-1
PROBLEM 3-8 _____
Statement:
Units:
A cam-follower system similar to that shown in Figure 3-15 has a mass m = 1 kg, a spring constant k = 1000 N/m, and a damping coefficient d = 19.4 N-s/m. Find the undamped and damped natural frequencies of this system.
cps := 2 ⋅ π ⋅ rad ⋅ sec
− 1
Given:
Solution:
Mass M := 1 kg ,
Damping coefficient d := 19.4 N ⋅ s
Spring constant k := 1000 N ⋅ m
−
⋅ m
− 1
1
See Figure 3-15 and Mathcad file P0308.
1. Calculate the undamped natural frequency using equation 3.4.
ω n
:= k
M
ω n
= 31.6
rad sec
2. Calculate the undamped natural frequency using equation 3.7.
ω n
= 5.03 cps
ω d
:= k
M
− d
2
ω d
= 30.1
rad sec
ω d
= 4.79 cps
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 3-9
Statement:
3-9-1
A ViseGrip plier-wrench is drawn to scale in Figure P3-3. Scale the drawing for dimensions. Find the forces acting on each pin and member of the assembly for an assumed clamping force of P =
4000 N in the position shown. What force F is required to keep it in the clamped position shown?
Given: Clamping force
Dimensions
P 4.00
kN a 50.0
mm b 55.0
mm c 39.5
mm d 22.0
mm e 28.0
mm f 26.9
mm g 2.8
mm h 21.2
mm
α 21.0
deg
β 129.2
deg
Assumptions: Links 3 and 4 are in a toggle position, i.e., the pin that joins links 3 and 4 is in line with the pins that join 1 with 4 and 2 with 3.
Solution: See Figure 3-9 and Mathcad file P0309.
1. The FBDs of the assembly and each individual link are shown in Figure 3-9. The dimensions, as scaled from
Figure P3-3 in the text, are given above and are shown on the link FBDs.
F 4
P
1
F
55.0 = b
39.5 = c
F
41
F
50.0 = a
22.0 = d
129.2° 1
3
F
21
P
F
14
2
4
P
F
34
28.0 = e
P
2.8 = g
F
43
3
2
F
12
21.2 = h
F
23
F
32
F
26.9 = f
FIGURE 3-9
Free Body Diagrams for Problem 3-9
2. Looking first at Part 3, we see that it is a three-force body. Therefore, the lines of action of the three forces must intersect at a point. But, since Parts 3 and 4 are in a toggle position, F
43
and F
23
are colinear, which means that their x - and y -components must be equal and opposite, leading to the conclussion that F = 0 .
MACHINE DESIGN - An Integrated Approach, 4th Ed.
3. Now, looking at Part 1, we see that (for F = 0) it is also a three-force body, as is Part 2. In fact, the forces on
Part 1 are identical to those on Part 2. Solving for the unknown reactions on Parts 1 and 2,
3-9-2
F x
: F
41 cos ( 180 deg α ) F
21 cos ( β 180 deg ) = 0 (a)
(b) F y
: F
41 sin ( 180 deg
Substituting equation (c) into (b)
α ) F
21 sin ( β 180 deg
Solving equation (a) for F
21
F
21
=
F
41 cos ( 180 deg cos ( β 180 deg )
α )
) P = 0
F
41 sin ( 180 deg α )
F
41 cos ( 180 deg cos ( β 180 deg )
α ) sin ( β 180 deg ) P = 0
Solving equation (d) for F
41
F
41 sin ( 180 deg α )
P cos ( 180 deg α ) cos ( β 180 deg ) sin ( β 180 deg )
F
21
F
41 cos ( 180 deg cos ( β 180 deg )
α )
F
41
5.1
kN
F
21
7.5
kN
Checking moment balance on Part 1,
F
41 sin α c F
21 sin ( β 90 deg ) d P a 0 kN m
The result is, within the accuracy of the scaled dimensions, zero as it must be.
4. The x and y components of the pin forces on Part 1 are
F
41x
F
41y
F
41 cos ( 180 deg
F
41 sin ( 180 deg
α
α )
) F
41x
F
41y
4.749
kN
1.823
kN
(c)
(d)
F
21x
F
21y
F
21 cos ( β 180 deg )
F
21 sin ( β 180 deg )
5. The forces on the pins at the ends of Part 4 are
F
14
F
41
F
34
F
14
6. The forces on the pins at the ends of Part 3 are
F
43
F
34
F
23
F
43
F
21x
4.749
kN
F
21y
5.823
kN
F
14
5.1
kN
F
34
5.1
kN
F
43
5.1
kN
F
23
5.1
kN
MACHINE DESIGN - An Integrated Approach, 4th Ed.
7. The forces on the pins at the ends of Part 2 are
F
12
F
21
F
32
F
23
Checking moment equilibrium on Part 2,
F
12
(
F
32 e cos ( β 90 deg ) g sin ( β 90 deg ) )
( h cos α f sin α ) which is zero, as it must be.
F
12
F
32
7.5
kN
5.1
kN
0 kN m
3-9-3
MACHINE DESIGN - An Integrated Approach, 4th Ed.
PROBLEM 3-10
3-10-1
Statement: An overhung diving board is shown in Figure P3-4a. Find the reaction forces and construct the shear and moment diagrams for this board with a 100 kg person standing at the free end.
Determine the maximum shear force, maximum moment and their locations.
Given: Beam length
Distance to support
Mass at free end
L 2000 mm a 700 mm
M 100 kg
Assumptions: The weight of the beam is negligible compared to the applied load and so can be ignored.
R
1
2000 = L
R
2
P
See Figure 3-10 and Mathcad file P0310.
700 = a
Solution:
FIGURE 3-10A
Free Body Diagram for Problem 3-10
1. From inspection of Figure 3-10, write the load function equation q(x) = R
1
< x - 0> -1 + R
2
< x - a > -1 - P < x - L > -1
2. Integrate this equation from - to x to obtain shear, V(x)
V(x) = R
1
< x - 0> 0 + R
2
< x - a > 0 - P < x - L > 0
3. Integrate this equation from - to x to obtain moment, M(x)
M(x) = R
1
< x - 0> 1 + R
2
< x - a > 1 - P < x - L > 1
4. Determine the magnitude of the force, P P M g P 980.7
N
5. Solve for the reactions by evaluating the shear and moment equations at a point just to the right of x = L , where both are zero.
At x = L + , V = M = 0 V = R
1
R
2
R
1
P
L a a
R
1
1821 N
R
2
6. Define the range for x
P R
1 x 0 in 0.005
R
2
L L
2802 N
P = 0 M = R
1
L R
2
( L a ) = 0
7. For a Mathcad solution, define a step function S . This function will have a value of zero when x is less than z , and a value of one when it is greater than or equal to z .
S x z ) ( z 1 0 )
8. Write the shear and moment equations in Mathcad form, using the function S as a multiplying factor to get the effect of the singularity functions.
R
1
S x 0 in ) R
2
S x a ) ( )
R
1
S x 0 in ) x R
2
S x a ) ( x a ) P S x L ) ( x L )
MACHINE DESIGN - An Integrated Approach, 4th Ed.
9. Plot the shear and moment diagrams.
Shear
Diagram
1000
0
N
1000
3-10-2
2000
0 500 1000 x mm
1500 2000
Moment
Diagram
N m
750
1125
0
375
1500
0 500 1000 x mm
1500 2000
FIGURE 3-10B
Shear and Moment Diagrams for Problem 3-10
10. The maximum value of the shear force ocuurs throughout the distance from x = 0 to x = a and is
R
1
1821 N
11. Find the maximum value of the bending moment by determining the value of x where the shear is zero.
Inspection of the shear diagram shows that this occurs at x = a .
M max
M max
1275 N m