Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
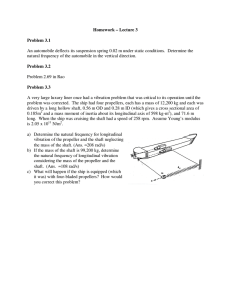
Example 2.1. Obtain the torsional natural frequency of the system shown in Figure 2.10 using the
transfer matrix method. Check results with closed form solution available. Take G = 0.81011 N/m2.
0.6m
1
2
0.1 m
22.6 kgm2
5.66 kgm2
Figure 2.10 Example 2.1
Solution: We have following properties of the rotor
G 0.8 1011 N/m 2 ;
l 0.6 m;
J
32
(0.1) 4 9.82 10-6m 4
The torsional stiffness is given as
kt
GJ 0.8 1011
9.82 10-6 1.31106 Nm/rad
l
0.6
Analytical method: The natural frequencies in the closed form are given as
n 0; and n
2
2
( I p I p )kt
1
2
Ip Ip
1
22.6 5.66 1.31106 537.97 rad/sec
22.6 5.66
2
Mode shapes are given as
For
n 0
2 0
and
n 537.77 rad/s
2
1
2
R
R
I p1
I p2
0 4.0 0
Transfer matrix method: State vectors can be related between stations 0 & 1 and 1 & 2, as
{S}1R [ P]1{S}0
{S}2R [ P]2 [ F ]2{S}1R [ P]2 [ F ]2 [ P]1{S}0
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
The overall transformation of state vectors between 2 & 0 is given as
1
2
T 2 n I p2
R
0 1 1 kt 1
0 1
1 0 1 n2 I p1 1 T 0 n2 I p2
1 n2 I p1 kt
2
n I p2 n2 I p1 1 2 I p2 kt
1 kt
1 I
2
n p2
1 kt
1 I
2
n p2
1
0
2
kt n I p1 1 T 0
kt T 0
On substituting values of various rotor parameters, it gives
R
1 1.73 105 n2
7.64 107
T 2 5.66n2 9.77 105 n4 22.6n2 9.77 107 n2 1 T 0
(A)
Since ends of the rotor are free, the following boundary conditions will apply
T0 T2R 0
On application of boundary conditions, we get the following condition
t21 [28.26n2 9.77 105 n4 ]{ }0 0
Since 0 0 , we have
n2 [9.77 105 n2 28.26] 0
which gives the natural frequency as
n 0 and n 537.77 rad/sec
1
2
which are exactly the same as obtained by the closed form solution. Mode shapes can be obtained by
substituting these natural frequencies one at a time into equation (A), as
For
n 0
2 0
rigid body mode
and
n 537.77 rad/s
2
anti-phase mode
1
2
R
R
4.0 0
which are also exactly the same as obtained by closed form solutions.
Example 2.2. Find torsional natural frequencies and mode shapes of the rotor system shown in Figure
1. B is a fixed end and D1 and D2 are rigid discs. The shaft is made of steel with modulus of rigidity G
= 0.8 (10)11 N/m2 and uniform diameter d = 10 mm. The various shaft lengths are as follows: BD1 =
72
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
50 mm, and D1D2 = 75 mm. The polar mass moment of inertia of discs are: Ip1 = 0.08 kg-m2 and Ip2 =
0.2 kg-m2. Consider the shaft as massless and use (i) the analytical method and (ii) the transfer matrix
method.
Figure 2.11 Example 2.2
B
D1
D2
Solution:
Analytical method: From free body diagrams of discs as shown in Figure 2.12, equations of motion
can be written as
I p11 k11 k2 (1 - 2 ) 0
I p2 2 k2 ( 2 - 1 ) 0
The above equations for free vibrations and they are homogeneous second order differential
equations. In free vibrations discs will execute simple harmonic motions.
k11
k2( 2-1)
k2( 2-1)
1
(a)
2
D1
(b)
D2
Figure 2.12 Free body diagram of discs
For the simple harmonic motion n2 , hence equations of motion take the form
k1 k2 - I p1 n2
k2
1 0
k2 I p2 n2 2 0
k2
On taking determinant of the above matrix, it gives the frequency equation as
I p1 I p2n4 ( I p1 k2 I p2 k1 I p2 k2 )n2 k1k2 0
73
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
which can be solved for n2 , as
n2
I p1 k2 I p2 k1 I p2 k2
I
k I p2 k1 I p2 k2
p1 2
2
4k1k2 I p1 I p2
2 I p1 I p2
For the present problem the following properties are gives
k1
GJ1
GJ 2
1878 N/m and k2
523.598 N/m
l1
l2
I p1 0.08 kgm 2
I p2 0.2 kgm 2
and
Natural frequencies are obtained as
n 44.792 rad/s and n 175.02 rad/s
1
2
The relative amplitude ratio can be obtained as (Figure 2.13)
1 k2 - I p n
0.2336 for n
2
k2
2
2
1
for n2
and -10.700
1
0
1
-10.7
0.2336
0
(b) For n2
(a) For n1
Figure 2.13 Mode shapes
Transfer matrix method
k1
0
k2
1
2
Figure 2.14 Two-discs rotor system with station numbers
74
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
For Figure 2.14 state vectors can be related as
2 P 2 F 2 P 1 F 1 0
R
The above state vector at various stations can be related as
1
2
T
- I
R 1
n p1
I
1 R T 0
k1
1/ k1
2
n p1
and
1
2
T
- I
R 2
n p2
1/ k2
I
2
n p2
k1
1 R T 1
which can be combined to give
n2 I p
1
1
k
2
T
R 2
p
1
k2
p n2 I p2
T 0
1
k2
k1
2
1 n I p1
1
k1
k2
with
n2 I p2
p I I
1
k2
2
n p2
2
n p1
Boundary conditions are given as
At station 0
= 0 and T = 1 (assumed)
and at right of station 2 T = 0
On application of boundary conditions the second equation of equation (A), we get
p n2 I p2
0 p0
1 RT0
k1
k2
since RT0 0 and on substituting for p, we get
-n2 I p2
n2 I p2
1 2
2
I
I
1
1 0
n p2
n p1
k2
k1
k
2
75
(A)
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
which can be solved to give
kk
1 k2 2k1
1 k2 2k1
4 1 2
2 I p2 I p1
4 I p2 I p1
I p1 I p2
n2
It should be noted that it is same as obtained by the analytical method.
Exercise 2.1. Obtain the torsional critical speed of a rotor system as shown in Figure E.2.1 Take the
polar mass moment of inertia, Ip = 0.04 kg-m2. Take shaft length a = 0.3 m and b = 0.7 m; modulus of
rigidity G = 0.8 1011 N/m2. The diameter of the shaft is 10 mm. Bearing A is flexible and provides a
torsional spring of stiffness equal to 5 percent of the stiffness of the shaft segment having length a and
bearing B is a fixed bearing. Use either the finite element method or the transfer matrix method.
B
A
a
b
Figure E2.1 An overhang rotor system
Exercise 2.2. Find the torsional critical speeds and the mode shapes of the rotor system shown in
Figure E2.2 by transfer matrix method. B1 and B2 are frictionless bearings and D1 and D2 are rigid
discs. The shaft is made of steel with modulus of rigidity G = 0.8 (10)11 N/m2 and uniform diameter d
= 10 mm. The various shaft lengths are as follows: B1D1 = 50 mm, D1D2 = 75 mm, and D2B2 = 50
mm. The polar mass moment of inertia of discs are: Jd1 = 0.0008 kg-m2 and Jd2 = 0.002 kg-m2.
Consider shaft as massless.
Figure E2.2
B1
B2
D1
D2
76
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
Exercise 2.3. Obtain the torsional critical speed of an overhang rotor system as shown in Figure E2.3.
The end B1 of the shaft is having fixed end conditions. The disc is thin and has 0.02 kg-m2 of polar
mass moment of inertia. Neglect the mass of the shaft. Use (i) the finite element and (ii) the transfer
matrix method.
D1
Figure E2.3
B1
Exercise 2.4 Find the torsional natural frequencies and the mode shapes of the rotor system a shown
in Figure E2.4 by ONLY transfer matrix method. B1 and B2 are fixed supports and D1 and D2 are rigid
discs. The shaft is made of steel with modulus of rigidity G = 0.8 (10)11 N/m2 and uniform diameter d
= 10 mm. The various shaft lengths are as follows: B1D1 = 50 mm, D1D2 = 75 mm, and D2B2 = 50
mm. The polar mass moment of inertia of discs are: Jd1 = 0.08 kg-m2 and Jd2 = 0.2 kg-m2. Consider
shaft as massless.
Figure E2.4
D1
D2
B1
B2
Exercise 2.5 Find all the torsional natural frequencies and draw corresponding mode shapes of the
rotor system shown in Figure E2.5. B and D represent bearing and disc respectively. B1 is fixed
support (with zero angular displacement about shaft axis) and B2 and B3 are simply supported (with
non-zero angular displacement about shaft axis). The shaft is made of steel with modulus of rigidity G
= 0.8 (10)11 N/m2 and uniform diameter d = 10 mm. The various shaft lengths are as follows: B1D1 =
50 mm, D1B2 = 50 mm, B2D2 = 25 mm, D2B3 = 25 mm, and B3D3 = 30 mm. The polar mass moment
of inertia of the discs are: Ip1 = 2 kg-m2, Ip2 = 1 kg-m2, and Ip3 = 0.8 kg-m2. Use both the transfer
matrix method and the finite element method so as to verify your results. Give all the detailed steps in
obtaining the final system equations and application of boundary conditions. Consider the shaft as
massless and discs as lumped masses.
Figure E2.5
77
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
B1
B2
D1
B3
D3
D2
Exercise 2.6 Obtain the torsional critical speed of turbine-coupling-generator rotor as shown in Figure
E2.6 by the transfer matrix and finite element methods. The rotor is assumed to be supported on
frictionless bearings. The polar mass moment of inertias are IpT = 25 kg-m2, IpC = 5 kg-m2 and IpG =
50 kg-m2. Take modulus of rigidity G = 0.8 1011 N/m2. Assume the shaft diameter throughout is 0.2
m and lengths of shaft between bearing-turbine-coupling-generator-bearing are 1 m each so that the
total span is 5 m. Consider shaft as massless.
Bearing
Turbine
Coupling
Generator
Bearing
Figure E2.6 A turbine-generator set
Exercise 2.7 In a laboratory experiment one small electric motor drives another through a long coil
spring (n turns, wire diameter d, coil diameter D). The two motor rotors have inertias I1 and I2 and are
distance l apart, (a) Calculate the lowest torsional natural frequency of the set-up (b) Assuming the
ends of the spring to be “built-in” to the shafts, calculate rotational speed (assume excitation
frequency will be at the rotational frequency of the shaft) of the assembly at which the coil spring
bows out at its center, due to whirling.
Example 2.3. For geared system as shown in Figure 2.16 find the natural frequency and mode shapes.
Find also the location of nodal point on the shaft (i.e. the location of the point where the angular twist
due to torsional vibration is zero). The shaft ‘A’ has 5 cm diameter and 0.75 m length and the shaft
‘B’ has 4 cm diameter and 1.0 m length. Take modulus of rigidity of the shaft G equals to 0.8 1011
N/m2, polar mass moment of inertia of discs are IA = 24 Nm2 and IB = 10 Nm2. Neglect the inertia of
78
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
gears.
10 cm diameter
Gear Pair
B
A
20 cm diameter
Figure 2.17 Example problem 2.1
Solution: On taking shaft B has input shaft (or reference shaft) as shown in Figure 2.18 the gear ratio
can be defined as
Gear ratio
rpm of reference shaft B N B
D
T
input speed
20
n A A
2
output speed
DB TB 10
rpm of driven shaft A N A
10 cm
B
d = 4 cm
Input
lB = 1 m
A
IPB=10 Nm2
Output
d = 5 cm
lA = 0.75 m
IPA = 24 Nm2
20 cm
Figure 2.18 A geared system
The area moment of inertia and the torsional stiffness can be obtained as
JA
π 4
d A 6.136 107 m 4 ;
32
KA
GJ A 0.8 1011 6.136 10-7
6.545 104 Nm/rad
lA
0.75
JB
and
K B 2.011104 Nm/rad
79
π 4
d B 2.5110 7 m 4
32
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
On replacing shaft A with reference to the shaft B by an equivalent system, the system will look as
shown in Figure 2.19. The equivalent system of the shaft system A has the following torsional
stiffness and mass moment of inertia properties
KA
e
K A 6.545 104
2
1.6362 104 N m/rad
2
n
2
which gives the equivalent length as:
lA
e
I PA
and
I PA 24
2 6 Nm 2
2
n
2
GJ B 0.8 1011 2.513 107
1.2288m
KA
1.6362 104
e
Gear location
Ae
B
l B 1m
l Ae 1.2288m
leff 2.2288 m
I PAe
I PB
Figure 2.19 Equivalent single shaft system
The equivalent stiffness of the full shaft is given as
1
1
1
1
1
1.1085 104 m/N
4
K e K A K B 2.01110 1.6362 10 4
e
which gives K e 9021.2 N/m
The equivalent shaft length is given as
le lA lB n 2lA
e
d B4
lB 1.2288 1 2.2288 m
d A4
The natural frequency of the equivalent two mass rotor system as shown in Figure 2.19 is given as
1
( I PA I PB ) K e
e
(
I
PAe I PB )
n
1
2
1
2
6
10
9021.2
9.81
153.62 rad/sec
2
6 10 /9.81
Gear location
80
B 1.0
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
Ae 1.667
le
1
2.2288
le =1.0
2
Ae
0.8358 m
B
node point
I PAe
I PB
Figure 2.20 Mode shape and nodal point location in the equivalent system
The node location can be obtained from Figure 2.20 as
A
e
ln
B
ln
1
2
which can be written as noting equation (9), as
ln
1
ln
2
A
e
B
I PB
10
1.667
I PA
6
e
The negative sign indicates that both discs are either ends of node location. The absolute location of
the node position is given as
ln 1.667 ln
1
2
Also from Figure 2.20 we have
ln ln 2.2288
1
which gives
2
ln 0.8358 m
2
The node is at 0.8356 m from end B. Alternatively, from similar triangle of the mode shape (Figure
2.20), we have
ln
2
2.2288 ln
e
2
Let B 1rad then
B
1
ln 0.8358 m
2
A 1.667
A 1.667 rad
e
81
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
Hence,
A
A
e
n
0.8333rad
The mode shape and node location in the actual system is shown in Figure 2.21.
Gear pair
A
B
node location
A 1.667
A = - 0.8333
B = 1
0.8358 m
e
0.75 m
1m
Gear pair position
Figure 2.21 Mode shape and nodal point location in the actual system
Alternative way to obtain natural frequency is to use the equivalent two mass rotor (Figure 2.19) can
be considered as two single DOF systems (one such system is shown in Figure 2.22).
ln
2
I PB
82
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
Figure 2.22 A single DOF system
The stiffness and mass moment of inertia properties of the system is given as
Kl
e2
GJ B 0.8 1011 2.513
10
2.435 104 N/m and I PB
kgm2
ln
0.8358
9.81
2
It gives the natural frequency as
n
2
Kl
e2
I PB
2.435 104 9
154.62 rad/sec
10
which is same as obtained earlier.
The whole analysis can be done by replacing shaft B with reference to shaft A speed by an equivalent
system. For more clarity some of the basic steps are given as follows.
lB
IpB
lA
IpA
lA = 0.75
l Be = 0.61
le = 1.36 m.
I PBe
IpA
Figure 2.23 Actual and equivalent geared systems
It is assumed here that we are choosing reference shaft as input shaft (i.e. for present case shaft A is
reference shaft hence it is assumed to be input shaft and according the gear ratio will be obtained).
n
B DB 10
0.5
A DA 20
It is assumed that equivalent shaft (i.e. B) has same diameter as the reference shaft (i.e. A). The
equivalent mass moment of inertia and stiffness can be written as
83
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
I PB
e
I PB
I PB 2.011104
2
2 40N m and K B 2
8.044 104 N/m2
2
e
n
n
(0.5)
which gives the equivalent length as
since K B
e
GJ A
8.044 104
lB
lB
e
e
0.8 1011 6.136 107
0.610 m
8.044 104
The total equivalent length and the torsional stiffness would be
le lAe lB 0.61 0.75 1.36 m
and
Ke
GJ A 0.8 1011 6.136 10 7
3.61 10 4 N/m 2
le
1.360
Alternatively the effective stiffness can be obtained as
1
1
1
Ke K A K B
or Ke
K A .K B
e
K A KB
e
e
6.545 104 8.044 104
3.61104 N/m2
4
4
6.545 10 8.044 10
The natural frequencies of two mass rotor system is given by
1
n 0
1
1
( I PA I PB ) 2
( I PA I PBe ) 2
e
n
Ke 9.81
Ke
2
I PA I PB
I PA I PBe
e
and
A factor 9.81 is used since IPA is in Nm2.
1
(24 40)
2
n2 9.81
3.61104 153.65 rad/s
24 40
1.36 m
le1 0.8 m
l e 2 0.51 m
0.75m
84
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
Gear location
I PA
I PB
e
node location
Figure 2.24 Equivalent two mass rotor system
The node location can be obtained as
ln
1
ln2
I PB
e
I PA
10
1.667
6
we have
ln1 ln2 le le 1.36
1
2
which gives
(1.667ln ) ln 1.36
1
2
ln 0.85m and ln 0.51m
1
2
The stiffness of ln will be (equivalent stiffness corresponding to shaft A speed)
2
KB
e2
GJ A
ln
2
The shaft stiffness corresponding to shaft B speed can be defined in two ways i.e.
KB
2
GJ B
l2
and
K B n2 K B n2
e2
2
GJ A
ln
2
On equating above equations the location of the node in the actual system can be obtained as
l2 n 2le
2
JB
0.84
JA
which is same as by previous method.
Exercise Problem 2.8. For a geared system as shown in Figure E2.8 find the natural frequencies and
mode shapes. Find also the location of nodal point on the shaft (if any). The shaft ‘A’ has 5 cm
diameter and 0.75 m length and the shaft ‘B’ has 4 cm diameter and 1.0 m length. Take modulus of
rigidity of the shaft G equals to 0.8 1011 N/m2, polar mass moment of inertia of discs and gears are
IA = 24 Nm2, IB = 10 Nm2, IgA = 5 Nm2, IgB = 3 Nm2.
85
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
10 cm diameter
Gear Pair
A
B
20 cm diameter
Figure E2.8 A geared system
Example 2.4. Obtain the torsional critical speeds of the branched system as shown in Figure 2.26.
Take polar mass moment of inertia of rotors as: IPA = 0.01 kg-m2, IPE = 0.005 kg-m2, IPF = 0.006 kgm2, and IPB = IPC = IPD = 0. Take gear ratio as: nBC = 3 and nBD = 4. The shaft lengths are: lAB = lCE =
lDF = 1 m and diameters are dAB = 0.4 m, dCE = 0.2 m and dDF = 0.1 m. Take shaft modulus of rigidity
G = 0.8 1011 N/m2.
C
E
A
B
F
D
Figure 2.26 A branched rotor system
Solution: The branched system has the following mass moment of inertias
I PA 0.01 kg-m2;
I PE 0.005 kg-m2;
I PF 0.006 kg-m2
For branch A the state vector at stations are related as
{S}nA [U ] A {S}OA
with
86
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
0 1 4.97 1011n2
1
0.01n2
4.97 109 1
2
1
0
0.01n
U A [F ] AB [P] A 1
4.97 109
1
For branch B the state vector at stations are related as
{S}nB [U ]B {S}OB
with
U B [ P]B [ F ]CE
1
2
0.005n
3.97 10 1
7.95 108
10
2
n
Similarly, for branch C, we have
{S}nC [U ]C {S}OC
with
1
U C [ P]B [ F ]BF
2
0.006n
7.64 10 1
1.27 106
9
2
n
From equation (53), the frequency equation can be written as
c21a11
c b a n
nBD c22 a 22 21 11 BD
21
nBD
b n2
0
22 BC
On substitution, we get
0.006n2 (1 4.97 1011n2 )
4 1 7.64 109 n2 (0.01n2 )
4
4 (1 7.64 109 n2 )(0.005n2 )(1 4.97 10 11n2 )
0
9
(1 3.97 1010 n2 )
which can be simplified to
0.04372n2 3.39211010 n4 1.211019 n6 0
The roots of the polynomial are
87
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, (rtiwari@iitg.ernet.in)
n2
1,2,3
0;
135.48 106
and
2.64 10 9
Natural frequencies are given as
n1 0 ; n 2 11640 rad/s and n3 51387 rad/s
It can be seen that the rigid body mode exist since ends of the gear train is free.
88