Economic Dispatch for a Distribution Network with Intermittent Renewables and Tap Changers

Economic Dispatch for a Distribution Network with
Intermittent Renewables and Tap Changers
Mikhail A. Bragin, Bing Yan, Yan Li, Peter B. Luh, Peng Zhang
Department of Electrical and Computer Engineering
Abstract—Urban power distribution networks (UDNs) play an important role but they have not been designed to sustain the everincreasing growth of distributed generation such as solar. Because of the intermittency of such generation, UDNs are suffering from voltage and frequency fluctuations. Moreover, to maintain power quality and reliability, grid devices such as transformer taps are forced to be adjusted frequently, and rapidly reach their end of lives. In this paper, an urban network with one solar farm and several distributed generators is considered. It is assumed that the network is well-balanced, and economic dispatch (ED) is performed. With significant levels of solar penetration, such ED is challenging since (1) the intermittent nature of solar generation makes the problem stochastic and complicated; (2) AC power flow and tap changer equations make the problem highly nonlinear; and (3) discrete decisions (tap positions) makes the problem combinatorial. These difficulties will be resolved by (1) handling uncertainties through the use of Markov chains; (2) novel dynamic linearization through the use of absolute-value functions; (3) a decomposition and coordination approach with accelerated convergence. Testing results on a simple 3-bus and a modified 34bus system demonstrate that the method converges fast, and has the potential to solve practical distribution ED problems.
Keywords— Distribution Network Economic Dispatch; AC power flow; Solar Generation; Absolute-Value Linearization; Surrogate
Lagrangian Relaxation
I.
I NTRODUCTION
University of Connecticut
Storrs, USA mikhail.bragin@uconn.edu
The proliferation of intermittent renewables resources, such as solar farms, in urban power distribution networks (UDNs) frequently leads to voltage and frequency fluctuations. To maintain power quality and reliability, grid devices such as transformer taps [1] are forced to be adjusted frequently, and rapidly reach their end of lives. As an example, Hawaii utilities reported that their on-load tap changer (OLTC) transformers, discrete decisions (tap positions) makes the new ED problem mixed-integer and combinatorial.
The purpose of this paper is to formulate the economic dispatch problem while considering AC power flow and tap changers, and to develop the novel solution methodology. In
Section II, the literature review will be provided. Existing literature of ED problems, AC power flow and tap changers will first be reviewed. Then, relevant optimization methods such as
Lagrangian relaxation and branch-and-cut that have been used in power industry will be reviewed. While Lagrangian relaxation has been traditionally used to exploit separability, the presence of cross products of decision variables within AC power flow, the problem is not separable in the traditional sense.
Moreover, the traditional LR requires solving the entire relaxed problem thereby entailing high computational effort and zigzagging of multipliers and resulting in slow convergence.
Our recent breakthrough – surrogate Lagrangian relaxation
(SLR) which overcomes all major difficulties of standard LR will also be reviewed.
In Section III, the ED problem formulation whereby the expected cost of tap changes is co-optimized together with the expected generation cost while satisfying generator capacity, ramp-rate, AC power flow, line capacity and tap changer constraints.
In Section IV, the solution methodology is developed building upon our recent SLR. After formulating the relaxed problem, the convergence is accelerated through the use of quadratic penalties following the concept of Augmented
Lagrangian Relaxation. Then the resulting nonlinear relaxed problem is linearized through the novel use of dynamic linearization and absolute-value functions. After decomposing the resulting linearized relaxed problem into subproblems, subproblem solutions are coordinated by updating Lagrangian multipliers following the SLR framework.
In Section V, through the use of a 3-bus system with meshed traditionally maintenance-free during a 40-year lifespan, would be maintained every three months and retire within two years because the PV-induced voltage fluctuations made them adjusted over 300 times per day [2]. The consideration of tap changers to control voltage is therefore crucial. To achieve this,
Economic Dispatch (ED) has been recognized in recent years as an important mechanism for distribution networks [3-7]. Such an ED problem, however, is challenging since (1) the intermittent nature of solar generation makes the problem stochastic and complicated; (2) the consideration of AC power flow and tap changer equations to control voltage fluctuations make the problem highly nonlinear; and (3) the consideration of topology and a modified 34-bus system with radial topology, it is be demonstrated that the new method is computationally efficient and can generate high-quality feasible solutions. For these problems, good feasible solutions are obtained within the matter of seconds.
II.
L ITERATURE R EVIEW
In this Section, the modeling aspects of the problem such as modeling of AC power flow and tap changers will be reviewed first. Then, existing and relevant methods that have been used in power systems will be reviewed. Since the problem under
This work was supported by the National Science Foundation under Award No. CNS-1647209.
Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the NSF.
978-1-5386-7703-2/18/$31.00 ©2018 IEEE
consideration is non-linear, existing linearization methods together with MILP methods will also be reviewed.
A.
Modeling of Distriburtion System with AC power flow and
Tap Chnagers
The importance of an Economic Dispatch problem within the distribution network has been recognized in recent years to handle renewable energy uncertainties as well as to meet the stability requirement of the distribution network [3-7].
Different aspects of ED within a distribution network have been considered such as consideration of wind turbines and their probabilistic modeling [3], consideration of power losses [4], evaluation of dynamic pricing and peak power limiting based on demand response [5], and unbalanced three-phase AC power flow [6] by using a “semi-definite relaxation” of AC power flow in considered, which is accurate for radial topology. For the general topology, AC power flow in polar and rectangular coordinates has been considered. Within polar coordinates the power flow involves three way products of voltage decision variables at two adjacent buses and a trigonometric function of a phase angle between these two voltages. As compared to a formulation of AC power flow in polar coordinates, a formulation of the AC power flow model in rectangular coordinates [8] and [9] is modeled using complex voltages and, therefore, involves cross-products of two only real or imaginary components of voltages at adjacent buses. Phase angles can then be computed based on complex voltage values as needed.
To reduce voltage deviations, tap changers have been used
[1]. Generally, the goal is to keep the voltage amplitude within the pre-defined limits. With high levels of renewable penetration, however, to maintain power quality and reliability, transformer taps are forced to be adjusted frequently. As a result, they can rapidly reach their end of lives or suffer from premature failures. As an example, Hawaii utilities reported that their on-load tap changer (OLTC) transformers, traditionally maintenance-free during a 40-year lifespan, would be maintained every three months and retire within two years because the PV-induced voltage fluctuations made the OLTC be adjusted over 300 times per day [2].
As a result, with significant levels of solar penetration, an
ED problem is challenging because the intermittent nature of solar generation, the consideration of nonlinear AC power flow and tap changer equations to control voltage fluctuations and the consideration of discrete decisions to model tap positions.
In the following, optimization methods that have been used in power systems will be reviewed.
B.
Relevant Optimization Methods
Lagrangian relaxation.
Lagrangian relaxation (LR) in combination with subgradient methods [10-11] was traditionally used to solve mixed-integer linear programming
(MILP) problems by exploiting separability. After relaxing system-wide coupling constraints such as demand or transmission capacity constraints, and decomposing the relaxed problem into subproblems associated with individual subsystems, subproblem solutions are coordinated by iterative updating of Lagrangian multipliers (“shadow prices” or simply
“prices.”). The major difficulties of standard LR with subgradient methods are that (1) they require solving all subproblems to update multipliers, leading to high computational effort and zigzagging of multipliers; and (2) the convergence proof requires the knowledge of the optimal dual value, which is generally unknown. While convergence can be achieved in practice by adaptively estimating the optimal dual value, such process is typically inefficient. As a result of the above difficulties, overall convergence may be very slow.
When it comes to solving problems with AC power flow, relaxed problems within the method are not separable in a traditional sense because of cross-products of voltage of adjacent buses.
Surrogate Lagrangian Relaxation (SLR) [12].
As presented above, traditional LR suffers from several major difficulties.
All these difficulties have now been overcome by SLR whereby after decomposing a relaxed problem, it is sufficient to solve one or multiple subproblems with much reduced effort subject to the simple “surrogate optimality condition” to update prices.
The resulting “surrogate” subgradient directions are smoother as compared to subgradient directions, and multiplier zigzagging is much alleviated. Moreover, convergence was proved without requiring the knowledge of the optimal dual value. This was achieved with a constructive process based on the contraction mapping concept whereby distances between
Lagrange multipliers at consecutive iterations strictly decrease, and as a result, multipliers converge to a unique limit. At the same time, stepsizes are kept sufficiently large to avoid premature algorithm termination. Additionally, a constructive stepsizing formula satisfying these criteria has been developed.
The new method also generates a valid lower bound to the optimal cost at convergence, thereby providing a measure of solution quality.
While the problem under consideration is a mixed-integer nonlinear programming problem, there are linearization methods through Taylor series expansion or Benders decompositions methods that typically decompose the mixed integer nonlinear problem into mixed-integer linear master problem and nonlinear subproblems. To solve resulting mixedinteger linear problems, branch-and-cut is frequently used.
Branch-and-cut. When solving a linear programming (LP) problem, its convex hull 1 is piece-wise linear and is exactly equivalent to the feasible set. An optimal solution is at one of its vertices. When solving an MILP problem, the feasible set of its LP relaxation is typically not equivalent to the convex hull because of integrality restrictions on some of the decision variables, and the resulting LP solution is typically not feasible with respect to the original problem. Within branch-and-cut, after relaxing integrality restrictions the method attempts to obtain the convex hull by cutting off LP regions outside of it by using linear “valid inequalities” (or cuts) without cutting off feasible solutions. However, the problem of obtaining the convex hull is known to be difficult, the method frequently relies mostly on time-consuming branching operations with questionable performance.
III.
P ROBLEM D ESCRIPTION AND F ORMULATION
Consider a distribution network with I ( i = 1,…, I ) buses, L
( l = 1,…, L ) lines, one solar farm and G ( g = 1,..., G ) generators.
Each line l is defined by using two nodes: s ( l ) whereby line l starts and e ( l ) whereby line l ends. Solar states are modeled by using N discrete states [13] with associated probabilities ϕ n
( t ) at
1 The smallest convex set containing feasible solutions.
each time period t (= 1,…, T ), transition probabilities 𝜋 𝑛,𝑚
from state n to state m . The solar generation levels are 𝑃 𝑆𝑜𝑙𝑎𝑟 𝑖,𝑛
(𝑡) .
Each generator g (=1,…, G ) has its cost function C g
, which generally depends on generation levels p g , n
( t ), which in turn, may depend on the state n ( = 1,…, N ). Assume that there is one tap changer associated with one solar farm and let 𝑑 𝑛
(𝑡) be an integer decision variable denoting the tap position at time t and state n , and 𝑑 𝑢𝑝 𝑛
(𝑡) and 𝑑 𝑑𝑜𝑤𝑛 𝑛
(𝑡) denote the change of tap position up and down, respectively. Each node i (=1,…, I ) is associated with complex voltage 𝑉 𝑖,𝑛
(𝑡) = 𝑉 𝑅𝑒 𝑖,𝑛
(𝑡) + 𝑗 ·
𝑉 𝐼𝑚 𝑖,𝑛
(𝑡) , and AC power flow in each line is complex F l,n
( t ) =
P l,n
( t ) + j · Q l,n
( t ).
A.
Objective function
The objective is to co-optimization the expected generation cost and the expected tap-changer cost: min
t
T N
1 n 1
g
G
1
n
n
С
C
c n g
p g , n
b n
.
(1)
The problem is to determine generation levels of generators while nodal constraints, AC power flow constraints and tap changer constraints, which will be explained next.
B.
Nodal constraints
Generation Capacity Constraints.
When a node contains a generator g , the generator is subject to generation capacity constraints for all possible levels n : p min g
p g , n t = 1,…, T .
p g max , g = 1,…, G , n = 1,…, N ,
(2)
Ramp-rate constraints.
For an online generator g , the change of generation levels from time period t to t +1 cannot exceed its ramp rate Δ g
. Because of the presence of renewable generation, there are stochastic states and all transitions with nonzero probabilities should be feasible and satisfy the following ramprate constraints:
g
p g , n
p g , m
g
, g = 1,…, G , n = 1,…, N , n = 1,…, N , t = 1,…, T :
n , m
0 .
(3)
Nodal Power Balance.
For every node i , the net power generated and transmitted to the node should be equal to the net power consumed and transmitted from the node: p i , n
P i ,
Solar n
l
1 :
L
e ( l )
i
P l , n
L i
l
1 : b
L
( l )
i
P l , n i = 1,…, I , n = 1,…, N , t = 1,…, T .
,
(4)
If there are no generators or loads at bus i , then power generated p i , n
( t ), 𝑃
𝑆𝑜𝑙𝑎𝑟 𝑖,𝑛
(𝑡) and the load L i
( t ) will be trivially zero.
Voltage Restrictions.
The complex voltage within each node is subject to the following restrictions:
V g , min
V g , n
2
V g
Re
, n
2
V
Im g , n
2
g = 1,…, G , n = 1,…, N , t = 1,…, T .
V g , max
,
(5)
C.
AC power flow constraints in rectangular coordinates
Following [8] and [9], AC power flow is modeled in rectangular coordinates by using complex voltages 𝑉 𝑖,𝑛
𝑉
𝑅𝑒 𝑖,𝑛
(𝑡) + 𝑗 · 𝑉
𝐼𝑚 𝑖,𝑛
(𝑡) at bus i and state n
(𝑡) =
. Then active and reactive power in a line l that connects buses s ( l ) and e ( l ) are:
P l , n
( t )
g s ( l ), e ( l )
V s
Re
( l ), n
( t ) V
Re e ( l ), n
( t )
b s ( l ), e ( l )
V s
Re
( l ), n
( t ) V
Im e ( l ), n
( t )
(6) b s ( l ), e ( l )
V s
Im
( l ), n
( t ) V
Re e ( l ), n
( t )
g s ( l ), e ( l )
V s
Im
( l ), n
( t ) V
Im e ( l ), n
( t ),
Q l , n
( t )
b s ( l ), e ( l )
V
Re s ( l ), n
( t ) V
Re e ( l ), n
( t )
g s ( l ), e ( l )
V
Re s ( l ), n
( t ) V
Im e ( l ), n
( t )
g s ( l ), e ( l )
V
Im s ( l ), n
( t ) V
Re e ( l ), n
( t )
b s ( l ), e ( l )
V
Im s ( l ), n
( t ) V
Im e ( l ), n
( t ), l
= 1,…,
L, n = 1,…, N , t = 1,…, T .
(7)
Here b i,j
is susceptance of branch i,j , V i
Re and V i
Im are real and imaginary parts of the voltage at bus i respectively, and g i,j
is conductance of branch i,j .
The power flow in each line l should satisfy the following line capacity constraints:
P l , n
2
Q l , n
2
F l n = 1,…, N , t = 1,…, T .
, max
, l = 1,…, L ,
(8)
D. Tap Changer Constraints
Following reference [11], tap changer constraints can be written as:
V n
a n
1
V in a n
Z
T a )
V
(
*
S
, n = 1,…, N ,
(9) t = 1,…, T , where V in
is a voltage input and V n
voltage is a decision variable, a is the transformer ratio defined under no load conditions as V in
/ V n
, Z
T ( a )
is transformer leakage impedance, which generally is a function of a , but in this paper it is assumed that Z
T ( a )
is a complex number, and S is the transformer load.
Equation (9) can be equivalently written as: a n
V in
*
V n
V
1
2 a n
2
Z
T ( a )
S n
, n = 1,…, N , t = 1,…, T .
(10)
The transformer ratio is controlled as a n
a
0
d n
a , n = 1,…, N , t = 1,…, T , (11) where a
0
is the rated turn ratio (usually 1), Δ a is the single tap position change, and d is integer decision variable denoting the current tap position as d n
d n
d up n
t = 1,…, T . d n down
, n = 1,…, N ,
(12)
With significant levels of solar penetration, the ED problem formulated above is challenging since (1) the intermittent nature of solar generation makes the problem stochastic and complicated; (2) the consideration of AC power flow and tap changer equations to control voltage fluctuations make the problem highly nonlinear; and (3) the consideration of discrete decisions (tap positions) to traditional ED makes the new problem combinatorial and difficult to be optimized.
IV.
S OLUTION M ETHODOLOGY
This section is on development of the novel methodology building upon our recent Surrogate Lagrangian Relaxation motivated by accelerated convergence of Augmented
Lagrangian relaxation in subsection A. To overcome nonlinearity issues, the linearization scheme is introduced in subsection B.
A.
Surrogate Lagrangian Relaxation
The general idea of our recent Surrogate Lagrangian relaxation [12] is decomposition and coordination. After relaxing constraints an decomposing the resulting relaxed problem into subproblems, subproblem solutions are
coordinated by updating Lagrangian multipliers after solving one a few subproblems based on constraint violations.
Convergence of the method is improved motivated by
Augmented Lagrangian relaxation [14] and [15] by penalizing violations of relaxed constraints.
In terms of the ED problem under consideration, after introduction of slack variables, relaxation and penalization of nodal power balance (4), line capacity (8) and tap-changer (10) constraints, the Augmented relaxed problem becomes: min min
i
l
t
L aug c n
T N
N T
1 n 1
1 t 1
,
I N T
С g
G
1
1 n 1 t 1
L N T
n
1 n 1 t 1
i ,
,
l ,
n
d n
; n n g p , up
t n
P ,
g g
TCH
C i , l ,
Q ,
n
g
NFB
LC n
c , p
g , n
b
d n down n
l i
L N T
N T
1 t 1
2
c
g n
I N T
1 n 1 t 1
1 n 1 t 1 c
2 c
2
TCH g g t
LC l ,
NFB i , n n
2
2
2
,
(13) where g i ,
NFB n p i , n g l
LC
, n
P
Solar i , n
l
L
1 : e ( l )
i
P l , n t L i t
L
l
1 : b ( l )
i
P l , n
,
P l , n
2
Q l , n
2 z l , n
F l , max
,
(14)
(15) g
TCH n a n
*
V n
V in
2
a n
2
Z
T ( a )
S n
,
(16) are constraint violations corresponding to nodal flow balance
(NFB), line capacity (LC), and tap changer (TCH) constraints.
The problem (13) is highly nonlnear because quadratic penalty terms, quadratic functions within linear capacity constraints, and because of cross products within AC power flow constraints and within tap changer constraints.
Linearization of quadratic terms can be performed, e.g., by using Taylor Series expansion while keep only linear terms, and resulting linearized relaxed problem can be decomposed into subprobelms, which can then be coordinated. However, the fundamental characteristic of quadratic penalties is altered through such linearization, and the efficiency is significantly reduced. One our recent way to overcome this difficulty is to use absolute-value linearization of quadratic penalties [16] that has been used within the SLR framework as will be discussed in the following subsection B.
B.
Absolute-Value Lagrangian Relaxation with Dynamic
Linearization of AC Power Flow
One way to accurately linearize quadratic penalty terms is through the use of absolute-value penalties [16]. For example, quadratic penalties corresponding to (14) can be approximated using absolute value function as: g
NFB , k i , n
1 g
NFB i , n
. (17)
The linearization of the absolute-value function in will be performed in a standard way based upon [17, p. 28].
The resulting function will still be nonlinear because of nonlinear AC power flows within (14). This difficulty will be resolved by considering one node at a time, say, node b ( l ) where a line begins, and fixing decision variables of other nodes obtained at the previous iteration k -1 as: l
( t )
g b ( l ), e ( l )
V b
Re
( l )
( t ) V e
Re, k
( l )
1
( t )
b b ( l ), e ( l )
V b
Re
( l )
( t ) V e
Im, k
( l )
1
( t )
b b ( l ), e ( l )
V b
Im
( l )
( t ) V e (
Re, k l )
1
( t )
g b ( l ), e ( l )
V b
Im
( l )
( t ) V
Im, k e ( l )
1
( t ).
(18)
If node b ( l ) is also an end node ( e ( l ’)) with respect to another line l ’, then the linearization is performed in the same way by fixing decision variables associated with nodes b ( l ’).
To resolve nonlinearity of (15), each quadratic term will be approximated as:
ˆ l , n
2
~
ˆ l k
, n
1
ˆ l , n
and
ˆ l , n
2
~ k
1 l , n
ˆ l , n
. (19)
Therefore, following [16], a piece-wise linearization of (25) is:
P l k
, n
1
P l , n
Q l k
, n
1
l , n
z l , n
F l , max
. (20)
Lastly, penalty the tap-changer constraints will be piece-wise linearized as follows:
V
in a n k
2
1
a
0
d n
*
V n
a
a
0
a n
d
k n
1
*
V n k
a
1
Z
T
( a )
S n
,
(21) where the linearization of cross products is performed by fixing one variable as a time and then taking a weighted average of resulting terms using coefficients α and β so that α + β = 1.
Quadratic terms are linearized using absolute value functions as explained above. Penalization of (20) and (21) is then performs as in (17), and the corresponding penalty terms are linearized following the standard practice [17, p. 28].
After using these linearization principles, the relaxed problem is decomposed into linear nodal subproblems by fixing decision variables obtained at the previous iteration k -1 associated with other nodes. Linear nodal subproblems are then solved one by using branch-and-cut at a time and Lagrangian multipliers are updated using surrogate subgradient directions: g k
g i
NFB ,
, n k
,
~ l
LC
, n
, k
,
TCH p , n
, k
. (22)
The components of (22) are constraint violations (14)-(16) evaluated at subproblem solutions. To guarantee convergence, stepsizes are used following [12] based on the notion of contraction mapping as: s k
1
~ k
1 s k k g k
, 0
k
1 . (23)
A specific formula for setting
k
to guarantee convergence without requiring the optimal dual value is:
k
1
1
Mk
,
1
1 k r
, M
1 , 0
r
1 . (24)
V.
N UMERICAL T ESTING
The method is implemented using CPLEX 12.7.1 on a Dell
Precision 7720 laptop with processor Inter® Xeon® CPU E3-
1535M v6 @ 3.10GHz with installed memory (RAM) 32.0 GB and 64-bit operating system Windows 10. To demonstrate the coordination aspect and the near-optimal performance of the method, a simple 3-bus system with meshed topology and a modified 34-bus system with radial topology are considered.
Example 1: A 3-bus system
Consider a 3 bus triangular system with all busses interconnected. Assume that at bus 1 there is a generator, a solar farm of five stochastic states, and a tap changer, while the other
two buses have one generator each. Susceptance and conductance for each branch are chosen to be -0.4 and 0.4, respectively. The time interval is 5 minutes and the planning horizon is twelve. Results are shown in Fig. 1 below. The feasible cost of $954.96 is obtained under 10 seconds, and the corresponding duality gap is 1.5%.
965
960
955
950
945
940
0 2 4 6 8 10
CPU time (sec)
Fig. 1.
Results for Example 1. Feasible solutions are shown by x’s and a lower bound by a triangle
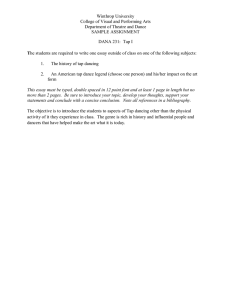
Example 2: A modified IEEE 34 -bus system
Consider the 34-bus system of [18] with slight simplification that there is only one solar farm with three stochastic states and one tap changer at bus 800. Three generators are located at buses
816, 856 and 834. Other transformers are removed for simplicity. The time interval is 5 minutes and the planning horizon is six.
Fig. 2.
Topology of a modified IEEE 34-bus system.
The results shown in Fig. 3 below indicate that a feasible solution with cost 121.1 is obtained under 6 seconds, and the duality gap of 4.8% is obtained after 20 seconds.
350
300
250
200
150
100
50
0
0 5 10 15 20 25
CPU time (sec)
Fig. 3.
Results for Example 2. Feasible solutions are shown by x’s
C ONCLUSION
With increasing levels of intermittent renewable generation such as solar, the importance of an ED problem within distribution networks has been recognized. To control voltage fluctuations, AC power flow together with tap changers are considered thereby making the ED problem difficult because of nonlinearities, stochasticity and combinatorial nature. These difficulties have been successfully overcome by modeling solar generation using Markov processes, by novel absolute value linearization to handle nonlinearity and by decomposition and coordination. The method is generic and has a broad applicability to solve difficult mixed-integer nonlinear programming problems.
R EFERENCES
[1] B. Kasztenny, E. Rosolowski, J. Izykowski, M M. Saha, and B. Hillstrom,
“Fuzzy logic controller for on-load transformer tap changer,” IEEE
Transactions on Power Delivery, Vol 13, no. 1, pp. 164-170, 1998.
[2] T. Sokugawa and M. Shawver, “Big data for renewable integration at
Hawaiian electric utilities,” in Proceedings of DistribuTech Conference
& Exhibition, Orlando, FL, pp. 9-11, 2016.
[3]
M. Farsadi, et al., “Economic dispatch problem for distribution network including wind turbines and diesel electric generators,” IEEE 2015 9th
International Conference on Electrical and Electronics Engineering
(ELECO).
[4]
W. Zheng, W. Wu, B. Zhang, Z. Li, and Y. Liu, “Fully distributed multiarea economic dispatch method for active distribution networks,” IET
Generation, Transmission & Distribution, vol. 9, no. 12, pp. 1341-1351,
2015.
[5]
M. P. Anand, et al., “Impact of economic dispatch in a smart distribution network considering demand response and power market,” in Energy
Economics and Environment (ICEEE), 2015 IEEE International
Conference, pp. 1-6, 2015.
[6]
Dall'Anese, E., Giannakis, G. B., & Wollenberg, B. F. “Economic dispatch in unbalanced distribution networks via semidefinite relaxation,” arXiv preprint arXiv:1207.0048, 2012
[7] Q. Li, G. Zhang, and C. Jiang, “Economic dispatch of active distribution network considering renewable energy uncertainties,” in CIRED
Workshop, pp. 1-4, 2016.
[8] X. Bai, H.Wei, K. Fujisawa, and Y.Wang, “Semidefinite Programming for Optimal Power Flow problems,” Int. J. Elect. Power Energy Syst., vol.
30, no. 6-7, pp. 383-392, 2008.
[9] Q. Li , L. Yang and S. Lin, “Coordination Strategy for Decentralized
Reactive Power Optimization Based on a Probing Mechanism,” IEEE
Trans. Power Syst., vol. 30, no. 2, pp. 555-562, Mar. 2015.
[10] X. Guan, P. B. Luh, H. Yan, and J. A. Amalfi, “An optimization-based method for unit commitment,” Int. J. Elec. Power Energy Syst., Vol. 14, no. 1, pp. 9–17, 1992.
[11] X. Guan, P. B. Luh, H. Yan, and P. M. Rogan, “Optimization-based scheduling of hydrothermal power systems with pumped-storage units,”
IEEE Trans. Power Syst., Vol. 9, no. 2, pp. 1023-1031, 1994.
[12]
M. A. Bragin, P. B. Luh, J. H. Yan, N. Yu and G. A. Stern, “Convergence of the Surrogate Lagrangian Relaxation Method,” Journal of Optimization
Theory and Applications, vol. 164, no. 1, 2015, pp. 173-201, DOI
10.1007/s10957-014-0561-3.
[13] P. B. Luh, Y. Yu, B. Zhang, E. Litvinov, T. Zheng, F. Zhao, J. Zhao and
C. Wang, “Grid Integration of intermittent wind generation: A Markovian
Approach,” IEEE Transactions on Smart Grid, vol. 5, no. 2, pp. 732-740,
2014
[14]
M. R. Hestenes, “Multiplier and gradient methods,” J. Optim. Theory
Appl., Vol. 4, no. 5, pp. 303-320, 1969.
[15]
M. J. D. Powell, “A method for nonlinear constraints in minimization problems,” in: Optimization, (R. Fletcher, ed.), Academic Press, 1969.
[16] X. Sun, P. B. Luh, M. A. Bragin, Y. Chen, J. Wan, and F. Wang, “A decomposition and coordination approach for large-scale security constrained unit commitment problems with combined cycle units,” in
Proc. 2017 IEEE Power Energy Soc. Gen. Meeting, pp. 1-5.
[17]
D. G. Luenberger, “Linear and Nonlinear Programming,” Addison
Wesley, Reading, MA, 1984.
[18]
J. O. Owuor, J. L. Munda and A. A. Jimoh, “The IEEE 34 Node Radial
Test Feeder as a simulation testbench for Distributed Generation,” in
IEEE Africon, Livingstone, 2011.