© The Author 2011. Published by Oxford University Press on behalf of The British Computer Society. All rights reserved.
For Permissions, please email: journals.permissions@oup.com
Advance Access publication on 1 July 2011
doi:10.1093/comjnl/bxr049
A Stochastic Geometry Model for
Cognitive Radio Networks
Tien Viet Nguyen and François Baccelli∗
INRIA/ENS, 45 rue d’Ulm, 75005 Paris, France
author: Francois.Baccelli@ens.fr
∗Corresponding
Keywords: stochastic geometry; multiple access; queueing theory; Poisson point process;
Matérn point process
Received 15 February 2011; revised 21 April 2011
Handling editor: Erol Gelenbe
1.
INTRODUCTION
Bandwidth is well known to become more and more scarce
with the explosion of wireless communications. Measurements,
nevertheless, show that at any specific time and location, most
of the spectrum is vastly underutilized [1]. This manifests itself
through voids in either time, space or spectrum. Cognitive radio
aims at exploiting these voids in order to accommodate extra
radio devices [referred to as secondary users (SUs)] in a network
whose first function is to serve a population of primary users
(PUs), e.g. licensed to use the spectrum. The key requirement
is that the PUs ought to be as little affected as possible by the
presence of SUs.
There have been many efforts in implementing cognitive
radio to exploit voids in time and spectrum; see [2–4]. The
present paper concentrates on exploiting voids in space by
considering cognitive radio in a wireless network with users
distributed in the Euclidean plane. The physical layer for
cognitive radio networks has already been considered in [5,
6]. Several Medium Access Control (MAC) layer protocols
were proposed for this setting like Cognet [7, 8], AMAC [9]
and C-CSMA/CA [10]. Other schemes meant to ensure the
preeminence of primary transmissions are discussed in [11, 12].
If some first models were proposed in [3, 13], it is fair to say that
there is a need for a comprehensive mathematical framework for
analyzing such cognitive radio networks. Our main contribution
is a new probabilistic framework based on stochastic geometry
[14, 15] for analyzing the performance of MAC protocols within
this context.
The protocols we focus on in the present paper are those
using Carrier Sensing (CS) as a mechanism for SUs to exploit
the spectrum left over by PUs. This can be explained in simple
geometric terms as follows: each primary transmitter has a
protection zone. If a user located in this zone transmits at the
same time, a collision occurs. Any user located in this protection
zone is hence called a contender of this transmitter. In most
cases, the union of all primary transmitter protection zones does
not cover the whole space. Thus, one can accommodate SUs in
the remaining space to better utilize the spatial resource.
Using the stochastic geometry framework alluded to above,
a quantification of this interaction between the two classes
of users is obtained. In fact, this approach leads to closed
form analytical expressions for the main performance metrics
of interest here, like the Medium Access Probability (MAP),
the Coverage Probability (COP) and the density of throughput
(defined below). The formulas in question are reminiscent of
those in priority queues [16], although the scheduling is here
for space/spectrum rather than for time/CPU as in the queuing
context. The difference here is that, due to the pervasive nature
of radio transmission, the presence of SUs is not anymore
transparent to PUs as, e.g. in preemptive priority queuing. In
fact, if the number of nearby SUs is large enough, PUs can still
suffer from non-negligible degradation. The models discussed
The Computer Journal, Vol. 55 No. 5, 2012
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
We propose a probabilistic model based on stochastic geometry to analyze cognitive radio in a large
wireless network with randomly located users sharing the medium with carrier sensing multiple
access. Analytical results are derived on the impact of the interaction between primary and secondary
users, on their medium access probability, coverage probability and throughput. These results can be
seen as the continuation of the theory of priorities in queueing theory to spatial processes. They give
insight into the guarantees that can be offered to primary users and more generally on the possibilities
offered by cognitive radio to improve the effectiveness of spectrum utilization in such networks.
A Stochastic Geometry Model for Cognitive Radio Networks
in the present paper aim at quantifying this degradation and
suggesting policies that can be used to limit it. The main interest
of the derived closed form formulas is that they allow one to
quantify and hence control the degradation incurred by PUs
due to the presence of secondary ones as well as to evaluate the
rate obtained by SUs.
In particular, we consider the following three models:
example is provided by cellular networks, where the
uplink channels from the end-user devices to the base
station can be used to transmit beacons. The active
mode is expected to be much more efficient than the
passive one.
(iii) Cognitive-CSMA wireless networks: This model
focuses on the scenario where we have a primary
mobile ad hoc network, together with a secondary one,
which tries to utilize the unused spectrum. Each user
in each network has an intended receiver. CS is used to
guarantee that no SU generates too much interference
to any primary receiver.
Furthermore, CS is also used in both (primary
and secondary) networks to control the level of
interference in each class. This results in the cognitiveCSMA protocol, which is based on the following
principles: Whenever a user in a network (either
primary or secondary) wants to transmit, it has to
use CS to detect the presence of other users in the
network. If this user senses no other user nearby, it
is then allowed to transmit. Otherwise, it has to wait
before transmitting.
As in [14], this cognitive-CSMA protocol is
modeled on a Matérn-type model, which is defined
as follows. Let us start with the primary network:
Each PU samples an independently and identically
distributed (i.i.d.) random variable (r.v.), which is
uniformly distributed in [0, 1]. These r.v.s will be
referred to as timers below. Two users are said to
contend with each other if either of the two senses
the presence of the other. In this case, they are not
allowed to transmit at the same time; otherwise they
would interfere and this would corrupt the reception
at each receiver. This exclusion rule is implemented
as follows: a tagged PU is allowed to transmit
by the CSMA protocol if and only if (iff) it has
the smallest timer among its contenders. For the
secondary network, in order to respect the primary
transmissions, an SU is forbidden to transmit (or
blocked) whenever it senses the presence of a PU. The
SUs that sense the presence of no PU then compete
to access the medium; this is done as above, namely
using random timers and CS.
In this setting, we also consider both the active
mode and the passive mode. In the active mode, the
receivers can transmit beacons so that the CS can
be done more efficiently. This can, for example, be
implemented by the Request To Send-Clear To Send
(RTS-CTS) handshaking technique: Whenever a user
wants to transmit, it sends an RTS message to its
receiver. Upon receiving this message, the receiver
senses other ongoing transmissions in the network.
If it senses the medium free, it replies with a CTS
message to the transmitter and the transmission takes
The Computer Journal, Vol. 55 No. 5, 2012
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
(i) Single PU: This is the simplest model considered
in this paper. It focuses on a particular primary
transmitter–receiver pair and can hence be used as a
basic building block for any cognitive radio network.
It is also quite well studied in the literature. We
consider this simple model first for the sake of
clear exposition and to prepare readers who are not
acquainted with stochastic geometry to be so with
more involved models.
The model features a single primary transmitter
located at the center of the plane, together with a
population of SUs. Each user in this network has an
intended receiver. To protect the primary transmission,
the SUs are only allowed to transmit when they are
not too close to the primary receiver. This can be
guaranteed by CS: The primary receiver uses a beacon
to announce its presence to the SUs. Whenever an SU
wants to transmit, it should first sense the channel in
order to detect the primary signals. If the received
primary signal is weak enough, the SU then assumes
that it is far from the primary receiver and that it can
hence transmit.
(ii) Multicast PU: This model is one step closer to certain
practical cognitive radio networks such as a TV
network or a cellular network.
It features a single primary transmitter at the center
of the plane, which has multiple receivers. In a TV
network, one can think of the primary transmitter
and its receivers as the TV station and the TV
receiver antennas, respectively. In cellular networks,
the former is the cell base station and the latter are enduser devices, respectively. There is also a population
of secondary wireless devices which try to use the
unused spectrum. As in the single PU model, we use
CS to protect the transmissions of PUs. To this end,
we consider two cases: The first one is the passive
mode, where the primary receivers have no beaconing
functionality to announce their presence (think of TV
antennas, for example). In this case, the SUs have to
rely on the signal from the primary transmitter to do
the CS. If an SU senses the signal from the primary
transmitter to it to be very weak, then it can assume
that it is far away compared with the transmission
range of the primary transmitter. Hence, it is allowed
to transmit. The second case is the active mode,
where the primary receivers can transmit beacons. An
535
536
T.V. Nguyen and F. Baccelli
For all the models described above, even with the CS-based
protection, the aggregated interference from all the SUs can
still have non-negligible impact on the primary performance.
Mathematical tools from stochastic geometry are then employed
to quantify this secondary to primary interference and its impact
on the performance of PUs.
The paper is organized as follows. Section 2 introduces
the stochastic geometry framework by analyzing the single
PU model. Section 3 extends this framework to the multicast
PU model. Section 4 focuses on the cognitive-CSMA model.
Section 5 gathers our conclusions.
Throughout the paper, for all definitions pertaining to point
processes, like planar Poisson point processes (PPPs), Palm
distributions or Slivnyak’s theorem, or to stochastic geometry,
like shot-noise fields or Matérn point processes, the readers
could refer to [14] or [15].
2.
Retain and transmission model
We assume a deterministic threshold, so that the indicator
variable that SU i belongs to the PU’s protection zone is
SINGLE PU
In this section, we consider a cognitive radio network model
with a single PU and a population of SUs. This models a network
where the primary population is very sparse. Nevertheless, the
presence of SUs still causes interference to the PU due to
the pervasive nature of radio communication. The goal of this
section is to quantify this ‘secondary to primary’ interference
and its impact on the performance of the PU.
In this model, the SUs employ an ALOHA-based MAC
protocol within their class. Each SU independently tosses a
coin. If the result is head, then this user senses the medium to
check whether there is any primary contender. The tagged SU
transmits only if it sees the network free of primary contenders.
The bias of these coins is a preset parameter of the protocol.
2.1.
2.2.
User model
The model features a PU which is a transmitter–receiver pair
T0I , R0I and a population of SUs (transmitter–receiver pairs)
{TiI I , RiI I }. By abuse of notation we will use also this notation
for the positions of transmitters and receivers. We assume the
following:
T0I is at the center of the plane;
|R0I | = R;
θ0I is the angular position of R0I ;
the set of secondary transmitters who access the
network is here determined by the ALOHA rule, i.e.
it is the subset of transmitters tossing a head;
(v) the point process of secondary transmitters I I =
{TiI I } is assumed to form a realization of a
(i)
(ii)
(iii)
(iv)
Ui = 1F I I −I |T I I −RI |−α >ρ ,
i,0
i
0
where ρ is the preset threshold.
Interference is treated as noise and the transmission is
successful if the SINR is larger than a pre-set constant T . The
SINRs of the PU and SUs are defined as
SINRI0 =
SINRIi I =
I −I
/R α
F0,0
W (R0I ) + IIMI (R0I )
I I −I I
/r α
Fi,i
I −I I
/|RiI I |α + II I \TiI I (RiI I )
W (RiI I ) + F0,i
,
where W is the power of the thermal noise, IMI = {TjI I s.t Uj =
1} and I (x) is the shot-noise associated with the point process
at point x, defined by
I (x) =
f (|Xi − x|),
Xi ∈
with f some response function. Particular cases of interest are
I I −I
IIMI (R0I ) =
Fj,i
/|TjI I − RiI I |α
j s.t. Uj =1
=
j
II I \TiI I (RiI I )
The Computer Journal, Vol. 55 No. 5, 2012
=
I I −I
Uj Fj,0
/|TjI I − R0I |α ,
I I −I
Fj,i
/|TjI I − RiI I |α
j =i s.t. Uj =1
=
j =i
I I −I
Uj Fj,i
/|TjI I − RiI I |α .
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
homogeneous PPP of intensity λI I . Below λI I will
denote the intensity of active secondary transmitters;
namely if one denotes by p the bias of the coin used
by secondary transmitters and by ν I I the intensity of
the total population of secondary transmitters, then
λI I = pν I I ;
(vi) each secondary receiver is assumed to be uniformly
distributed on a circle of radius r centered at its
transmitter: RiI I = TiI I + rl(θiI I ), where θiI I is
uniformly, identically and independently distributed
(i.i.d) in [0, 2π ], and l(θ) = (cos(θ ), sin(θ ));
I −I I
I I −I
I I −I I
I −I
(vii) F0,i
(Fi,0
, Fi,j
and F0,0
resp.) denotes the
fading of the channel from T0I to RiI I (TiI I to R0I ,
TiI I to RjI I and from T0I to R0I resp.). All the fading
variables are assumed to be i.i.d. and to follow
the cumulative distribution function (c.d.f.) G(·) =
P(F < ·). We assume Rayleigh fading, i.e. G(x) =
1 − e−μx .
place. The passive mode is used when the receivers
are not in a position to contribute to the RTS-CTS
handshaking technique or to transmit beacons. In this
case, the CS is carried out by making the transmitter
listen to the signal of the other transmitters.
537
A Stochastic Geometry Model for Cognitive Radio Networks
Proof. We have
5
4
I −I I
F0,i
P(Ui = 1) = P
3
|TiI I − R0I |α
<ρ
2
I −I I
= P(F0,i
< ρ|TiI I − R0I |α )
1
= 1 − exp{−μρ|TiI I − R0I |α }.
0
−2
−3
−4
−5
−5
0
Proposition 2. Given the location of the primary receiver,
the COP of the primary transmission is
5
I
pCOP
= LW (μT R α ) exp −λI I
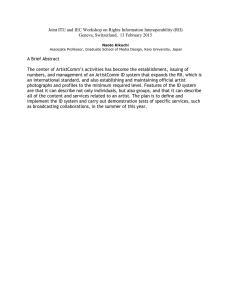
FIGURE 1. The path loss exponent is α = 3; the fading random
variables are exponential with parameter μ = 10; the retained SUs are
crosses while the blocked ones are circles.
g(x, R)dx ,
(3)
|x|α (1 − e−μρ(T R +|x| ) )
.
T R α + |x|α
(4)
R2
with
Note that the Shot-noise interference can be defined with any
p.p. . In the special case where
is Poisson, we have the
following useful result, the proof of which can be found in [14]
or [15] (Fig. 1).
Theorem 2.1. Suppose that = {yi } is a PPP with intensity
measure
m(x)dx. For all functions v from R2 to [0, 1] satisfying
R2 (1 − v(x))m(x)dx < ∞, we have
E
α
v(yi ) = exp −
(1 − v(x))m(x)dx .
(1)
R2
Proof. We want to compute the following probability:
In this model, the PU always accesses the channel. Thus we
are only interested in the MAP of an SU, which is P(Ui = 1).
Furthermore, because of interference, not every transmission
attempt is successful. We will hence consider the COP, which
is defined as the probability that the SINR of the tagged user is
larger than T . We will also consider a more global performance
metric, namely the total throughput (TT), which is defined as
the mean number of successful transmissions in the network per
time slot.
The following propositions gather analytical results on the
above metrics for this model.
Proposition 1. Given the position of the primary receiver,
and that of the ith SU, the MAP of the latter is
1 − exp{−μρ|TiI I − R0I |α }.
(2)
I −I
/R α
F0,0
P(SINRI0 > T ) = P
W (R0I ) + IIMI (R0I )
>T
.
I −I
Using the fact that F0,0
is an exponential r.v. with parameter
μ and W (·) is independent of everything, we have
P(SINRI0 > T ) = E e
Performance analysis
α
and with LW (s) the Laplace transform of the thermal noise W .
i
2.3.
α
g(x, R) = 1 − e−μρ|x| −
−μT R α (W (R0I )+II I (R0I ))
M
= E e−μT R
α W (R I )
0
]E[e
= LW (μT R α )E e
−μT R α II I (R0I )
M
−μT R α II I (R0I )
M
.
For the second term in the last equality, we have
E e
−μT R α II I (R0I )
M
II
I α
α
j I I −I
= E e−μT R j U Fj,0 /|Tj −R0 |
⎡
⎤
I I −I
I
I
I
α
j
α
= E ⎣ E[e−μT R U Fj,0 /|Tj −R0 | |G]⎦,
j
where G is the sigma algebra endowed by the positions of
SUs and where the external expectation is conditional on the
The Computer Journal, Vol. 55 No. 5, 2012
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
Since each SU senses the network independently, the SUs
who gain access to the medium form an independent thinning
of the process of all SUs with a thinning probability that only
depends on the location of the SU.As the latter is a homogeneous
PPP of intensity λI I , the former is an inhomogeneous PPP of
intensity measure λI I (1 − exp{−μρ|x − R0I |α })dx.
−1
538
T.V. Nguyen and F. Baccelli
positions of the primary receiver. Simple calculations give
II
I α
α j I I −I
E e−μT R U Fj,0 /|Tj −R0 | | G
=E e
−μT R α 1
I I −I <ρ|T I I −R I |α
Fj,0
0
j
I I −I
Fj,0
/|TjI I −R0I |α
can be computed as
I I −I I
II
II
α
α
E e−μT r (Fi,1 /|Tj −z| )Ui | H
|TiI I − z|α
− z|α + T r α
T rα
II
I α
= 1 − 1 − e−μρ|Ti −R0 |
.
II
|Ti − z|α + T r α
|G
= 1 − E[UiI I ] + E[UiI I ]
= 1 − g(TjI I − R0I , R).
Then, using Theorem 2.1, we have
−μT R α II I (R0I )
II
M
= exp −λ
E e
R2
g(x − R0I , R)dx .
Proposition 3. Given the position of the primary receiver,
the COP of a secondary transmitter at position y is
|y + rl(θ )|α
LW (μT r α ) 2π
II
pCOP
(y, λI I ) =
2π
|y + rl(θ )|α + T r α
0
e−λ
II
I α
R2
(T r α (1−e−μρ|x−R0 | )/T r α +|x−y−rl(θ )|α dx)
dθ.
(5)
Proof. Let Py,z denote the Palm distribution of the secondary
transmitters at y and its receiver at z, which can be interpreted as
the conditional probability of the model conditioned to having a
tagged secondary transmitter at y and its receiver at z. Without
loss of generality (w.l.o.g.), we can assume that this tagged user
is numbered 1. We have
Py,z (SINRI1I > T )
I I −I I
I −I I
= Py,z [F1,1
> T r α (W (z) + F0,1
/|z|α + II I \y (z))]
I −I I
/|z|α + II I \y (z))}]
= Ey,z [exp{−μT r α (W (z) + F0,1
= Ey,z [e
−μT r α W (z)
× Ey,z [e
]Ey,z [e
−μT r α II I \y (z)
I −I I
−μT r α F0,1
/|z|α
]
].
The first term of the last product is
Ey,z [e−μT r
α W (z)
] = LW (μT r α ).
I −I I
is an exponential
For the second term, using the fact that F0,1
r.v. with parameter μ, we have
T rα
|z|α
α I −I I
α
.
Ey,z e−μT r F0,1 /|z| = LF I −I I μ α = α
0,1
|z|
|z| + T r α
For the last term
α
Ey,z e−μT r II I \y (z)
⎡
⎤
I
I
−I
I
II
II
α
α
= Ey,z ⎣ E[e−μT r (Fi,1 /|Ti −z| )Ui | H]⎦ ,
i=1
where H is the sigma algebra endowed by the secondary
positions. Using Proposition 1, the term inside of the product
Then, using Theorem 2.1, we have
−μρ|x−R0I |α
α
II
α
)/T r α +|x−z|α )dx
Ey,z e−μT r II I \y (z) = e−λ R2 (T r (1−e
.
Putting these terms together and using the fact that z is uniformly
distributed in a circle of radius r centered at y gives us the
desired result.
It is easy to see that the TT of the SUs on the whole plane
is infinite. Thus we consider only the SUs in a region C which
is a disk of radius Rmax max{R, r} centered at T0I . The
intuition behind this choice of C is that, for SUs outside C, the
interactions with the PU are negligible, so that these SUs behave
like in a network without PUs.
Proposition 4. Given the position of the primary receiver,
the TT of SUs within C is
I α
II
S I I (λI I ) = λI I
pCOP
(y, λI I )(1 − e−μρ|y−R0 | )dy. (6)
C
Proof. This is just a corollary of Campbell’s formula (see [15]
or [14]) and the fact that Ui and SINRIi I are independent.
2.4.
Cognitive radio guarantees
In this subsection, we discuss the policies that SUs have to
comply with in order to provide some guarantees to the PU.
I
From (3) we can see that pCOP
(λI I ) decreases exponentially
II
fast to 0 as λ goes to ∞. Thus, for 1 > L > 0, there exists
I
a unique λup such that pCOP
(λup ) = L. If one wishes to have
a stochastic guarantee that the COP of the PU is at least L,
then one ought to limit the density of SUs below λup . Within
this constraint, the SUs seek to optimize their TT, i.e. maximize
S I I (λI I ). Let λmax = arg max{S I I (·)}; the optimal operation
point in this context consists in setting the secondary intensity
equal to λ∗ = min{λup , λmax }. This can be done in a distributed
way by requiring each SU to adjust its ALOHA coin tossing
bias such that the intensity of SUs accessing the network is λ∗ .
3.
MULTICAST PU
In this section, we investigate a cognitive radio network model
featuring a multicast PU, i.e. a primary transmitter with a
population of primary receivers, and a population of SUs. As in
the above model, the other primary base stations are assumed
The Computer Journal, Vol. 55 No. 5, 2012
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
Applying a change variable from x to x + R0I gives us the
desired result.
|TiI I
539
A Stochastic Geometry Model for Cognitive Radio Networks
to be so far that the inter-cell interference is negligible. Thus,
the only factor that has negative impact on the PU performance
is the ‘secondary to primary’ interference.
As usual, SUs must use CS to guarantee that they do not cause
excessive interference to PUs.
3.1.
SINRIa,i =
SINRIa,iI =
User model
We use the same notation for nodes and position of nodes as in
the previous model. We assume:
In this context, an SU is allowed to transmit if it does not cause
too much interference to any of the primary receivers; namely,
the retain indicator of the ith SU is
or
Ua,i =
in passive mode,
1F I I −I /|T I I −RI |α <ρ
i
i,j
j
I −I I
/|RiI I |α + IMa \TiI I (RiI I )
W (RiI I ) + F0,i
.
II
M
In the above formulas, M
p = {Ti s.t. Up,i = 1} and a =
{TiI I s.t. Ua,i = 1} are the point processes of retained secondary
transmitters in the passive and active modes, respectively. The
Shot-noise fields representing interferences are defined as
I I −I
IMp (RiI ) =
Up,j Fj,i
/|TjI I − RiI |α
j
IMp \TiI I (RiI I ) =
=
IMa (RiI )
I I −I I
Up,j Fj,i
/|TjI I − RiI I |α .
j =i
I I −I
/|TjI I − RiI |α
Ua,j Fj,i
j
=
IMa \TiI I (RiI I )
3.3.
I I −I I
Ua,j Fj,i
/|TjI I − RiI I |α .
j =i
Performance analysis
In this subsection, the performance metrics of interest are still
the MAP, COP and TT, the definitions of which are provided in
Section 2 (Fig. 2).
5
3
2
1
−1
in active mode,
j
−2
I −I
/|RiI |α
F0,i
W (RiI )
+
−3
−4
−5
−5
(i) In the passive mode:
I
SINRIp,i
=
I I −I I
/r α
Fi,i
0
where ρ and ξ are preset parameters. As above, the transmission
scheme treats interference as noise and a transmission is
successful if the SINR is higher than T . The SINR is defined
for primary and secondary receivers as follows:
SINRIp,i =
W (RiI ) + IMa (RiI )
4
Retain and transmission model
Up.i = 1Gi /|TiI I −T0I |α <ξ
I −I
/|RiI |α
F0,i
IMp (RiI )
I I −I I
/r α
Fi,i
I −I I
/|RiI I |α + IMp \TiI I (RiI I )
W (RiI I ) + F0,i
.
−4
−3
−2
−1
0
1
2
3
4
5
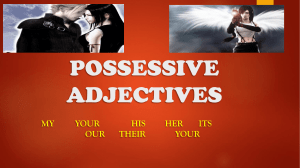
FIGURE 2. The primary receivers are the dots. The crosses are
retained SUs in the active mode; circles are blocked ones in the active
mode. The squares are retained SUs in the passive mode; diamonds
are blocked ones in the passive mode. For the sake of comparison, we
put the same sensing threshold for both the passive and active mode,
which is equal to 1.
The Computer Journal, Vol. 55 No. 5, 2012
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
(i) the primary transmitter T0I is at the center of the plane;
(ii) the process of primary receivers {RiI } forms a
realization of a PPP of intensity λI 1C , where C is
the cell of the base station. We assume that C is a disk
of radius R centered at T0I ;
(iii) the process of secondary transmitters I I = {TiI I }
forms a realization of a PPP of intensity λI I 1C . Thus
any SU outside C belongs to other cells and is not
considered;
(iv) the secondary receiver RiI I is assumed to be uniformly
distributed on the circle of radius r centered at TiI I , i.e.
RiI I = TiI I + rl(θiI I ), where l(·) is defined as above
and θiI I is i.i.d. in [0, 2π ];
I −I
I −I I
I I −I
I I −I I
(F0,i
, Fi,j
and Fi,j
resp.) is the fading
(v) F0,i
I
I
of the channel from T0 to Ri (from T0I to RiI I , TiI I
to RjI and from TiI I to RjI I ). The fading variables are
i.i.d exponential of parameter μ;
(vi) Gi is the fading from T0I to TiI I , which is assumed to
I −I I
and independent of
be identically distributed to F0,i
everything else in the system. This fading will be used
for the CS in the passive mode;
3.2.
(ii) In the active mode:
540
T.V. Nguyen and F. Baccelli
3.3.1. Passive mode
Proposition 5. In the passive mode, the MAP of a secondary
transmitter at position y is
1 − exp{−μξ |y|α }.
at z w.r.t. its receiver (w.l.o.g. we assume that the transmitter–
receiver pair at (y, z) is numbered 1). We proceed as in the proof
of Proposition 6:
I
> T)
Q0,,z (SINRIp,1
The proof is similar to that of Proposition 1 and is hence
omitted.
= Q0,y,z
Proposition 6. In the passive mode, the COP of a primary
receiver at position y is
I
(λI I , y) = LW (μT |y|α ) exp −λI I
pp,COP
I I −I I
/r α
F1,1
I −I I
W (z) + F0,1
/|z|α + IMp \y (z)
= E0,y,z e
I −I I
−μT r α (W (z)+F0,1
/|z|α +IM \y (z))
p
= LW (μT r α )LF I,I I
0,1
R2
T |y|α
T |y|
α
(1 − e−μξ |x| )dx .
α
+ |x − y|
I −I
/|y|α
F0,1
LIM \y (z)) (μT r α ),
p
where LV denotes the Laplace transform of the r.v. V . Since
I −I I
F0,1
is exponential,
Proof. First using the formula for the SINR and denoting by
P0,y the Palm probability at 0 w.r.t. the primary transmitter and
y w.r.t. the point process of primary receivers, we have
P0,y
rα
|z|α
rα
μT α
|z|
LF I −I I
0,1
=
|z|α
.
|z|α + T r α
For the last term, using Theorem 2.1, we have
>T
W (y) + IMp (y)
−μT |y|α (W (y)+I (y)) M
p
= E0,y e
−μT |y|α I (y) α
M
p
.
= E0,y e−μT |y| W (y) E0,y e
LIM \y (z)) (μT r α ) = e−λ
II
α
R2
(T r α /T |y|α +|x−RiI I |α )(1−e−μξ |x| )dx
.
p
Putting these together and using the fact that R1I I is uniformly
distributed on the circle of radius r centered at y gives us the
required result.
The first term is LW (μT |y|α ). For the second term:
−μT |y|α (I (y)) M
p
E0,y e
⎤
⎡
−μT |y|α U F I I −I /(|T I I −y|α ) p,j j,1
j
= E0,y ⎣ E e
| F⎦ ,
Proposition 8. Under the passive mode, the TT is
SpI (λI , λI I ) = λI
j
C
I
pp,COP
(y, λI I )dy,
(7)
with F the sigma algebra endowed with the positions of
I I −I
secondaries. Now, using the independence of UjI I , Fj,1
, we
can compute the term inside the product as
II
α I I I I −I
α
E e−μT |y| Uj Fj,i /(|Tj −y| ) | F
II α
T |y|α
= 1 − 1 − e−μξ |Tj |
.
T |y|α + |TjI I − y|α
for PUs and
Then using Theorem 2.1 gives us the required result.
3.3.2. Active mode
Proposition 9. The MAP of a secondary transmitter at
location y is
Proposition 7. In the passive mode, the COP of SUs at
position y is
II
pp,COP
(λI I , y) = LW (μT |y|α )
×e
−λI I
0
2π
|y + lr(θ )|
T r α + |y + lr(θ )|α
SpI I (λI , λI I ) = λI I
II
pp,COP
(y, λI I )(1 − e−μξ |y| )dy, (8)
α
C
for SUs.
Proof. This proof is similar to that of Proposition 4.
exp{−λI N (y)},
(9)
α
α
(T r α/T |y|α +|x−y−rl(θ)|α )(1−e−μξ |x| )dx
R2
where:
dθ.
Proof. Let Q0,y,z denote the Palm probability at 0 w.r.t. the
primary transmitter, at y w.r.t. the secondary transmitter and
N (y) =
exp{−μρ|y − x|α }dx.
(10)
C
Proof. Denoting by P0,y the Palm probability at 0 w.r.t. the
primary transmitter and at y w.r.t. the secondary transmitter
The Computer Journal, Vol. 55 No. 5, 2012
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
×
α
μT
A Stochastic Geometry Model for Cognitive Radio Networks
point process, we have
P0,y (Ua,1 = 1) = Ey [Ua,1 ]
⎡
= E0,y ⎣ (1
⎤
⎦
I I −I
F1,j
/|y−RjI |α <ρ )
j
⎡
⎤
I
α
= E ⎣ (1 − e−μρ|y−Rj | )⎦
j
= exp −λ
I
e−μρ|x−y| dx
α
C
= exp{−λI N (y)},
Proposition 10. The COP of a primary receiver at
position y is
I
pa,COP
(y, λI , λI I )
= LW (μT |y| ) exp −λ
α
II
g(x, y)e−λ
I N (x)
dx . (11)
C
Proof. This proof is the same as the proof of Proposition 6; we
only have to replace Up,j by Ua,j .
Proposition 11. The COP for an SU at position y is
II
pa,COP
(y, λI , λI I )
|y + lr(θ )|α
LW (μT r α ) 2π
(12)
=
2π
T r α + |y + lr(θ )|α
0
T rα
I
× exp −λI I
e−λ N (x) dx dθ.
α
α
C T r + |x − y − lr(θ )|
Proof. This proof is the same as that of Proposition 7; we only
have to replace Up,j by Ua,j .
Proposition 12. Under active mode, the TT is
I
SaI (λI , λI I ) = λI
pa,COP
(y, λI , λI I )dy,
(13)
C
for PUs and
SaI I (λI , λI I )
II
pa,COP
(y, λI , λI I )e−λ
I N (y)
=λ
II
C
dy,
(14)
for SUs.
Proof. This proof is similar to that of Proposition 4.
3.4.
Cognitive radio guarantees
As in Section 2.4, we seek for an operation point that complies
with performance guarantees for PUs and at the same time
maximizes the performance of SUs. In this section, we only
consider the active mode; the principle is the same for the passive mode. Here, instead of considering the local COP of each
primary receiver, we consider the global performance metric:
the TT. From (13), we have two important remarks. First, the
TT SaI (λI , λI I ) of PUs increases almost linearly in the primary
receivers’intensity λI . This comes from two reasons: increasing
λI makes the MAPs of SUs decrease exponentially fast as shown
in (9) and thus decreases inter-class interference; increasing λI
also increases the number of primary receivers and makes the
TT increase almost linearly. The second important remark is
that SaI (λI , λI I ) decreases exponentially fast to 0 as λI I goes to
∞. This means that in spite of the protection zones, inter-class
interference from an over-crowded area of SUs can destroy any
primary transmission. Thus, a limitation on the SUs’ intensity,
which is similar to that in Section 2.4, ought to be applied to
stochastically guarantee an acceptable performance for PUs.
More precisely, for L > 0, there exists a unique λup such
that SaI (λI , λup ) = L. One wants to guarantee a minimum TT
L for PUs; thus the SUs’ intensity must be smaller than λup .
Within this constraint, one should tune the intensity of SUs to
maximize the secondary TT S I I (λI , λI I ). This can be enforced
in an almost distributed way by requiring each SU to adjust
the ALOHA coin bias similarly to that presented in Section 2.4.
However, this time the scheme is only ‘almost’ distributed since
the tuning of the coin bias requires that each SU know the
‘global’ parameter λI .
4.
4.1.
COGNITIVE-CSMA
Probabilistic model
We now focus on a model featuring two mobile ad hoc networks
(MANETs): a primary and a secondary one. MANETs are
self-configuring wireless network’ such that each user in the
network also acts as a relay to route the traffic of other users.
Hence, there can be many users in the network who transmit
at the same time and cause excessive interference. For this
reason, each MANET in this model employs the CSMA MAC
protocol, a brief description of which is provided in Section 1, to
control the level of interference. To control secondary to primary
interference, CS is employed in a way that is similar to that of
the two previous models.
The results obtained in this section are extensions of the
framework introduced in [17].
4.1.1. General model
The user locations in this network are assumed to be realizations
˜ I = {TiI , tiI } and ˜ II =
of two independent marked PPPs II II
I
II
{Ti , ti } with intensities λ and λ , respectively, on R2 .
The model also features infinite matrices FI −I , FI −I I , FI I −I ,
FI I −I I , GI −I , GI I −I I and GI I −I .
(i) I = {TiI } denotes the position of the PUs. Each user
has an intended receiver RiI uniformly distributed in
the circle of radius r centered at this user;
The Computer Journal, Vol. 55 No. 5, 2012
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
where we have used Theorem 2.1.
541
542
T.V. Nguyen and F. Baccelli
4.1.2. Retaining model
Passive mode. We first consider the passive mode, where the
receivers cannot send beacons to announce their presence. In
this case, the condition that a transmitter is allowed to transmit
is encoded in the following retain indicators:
(i) For a primary transmitter TiI :
I
Up,i
=
j =i
1tiI ≤tjI + 1tiI >tjI 1(GI −I /|T I −T I |α )<ρ .
i,j
i
(ii) For a secondary transmitter TiI I :
⎞
II
Up,i
=⎝
1(GI −I I /|T I −T I I |α )<ρ ⎠
j,i
j
i
j
I
=
Up,i
i,j
i
j
(17)
1(F I −I /|T I −RI |α )<ρ .
j
j,i
i
(ii) For a secondary transmitter TiI I :
⎞
⎛
II
=⎝
Up,i
1(F I I −I /|T I I −RI |α )<ρ 1(F I −I I /|T I −RI I |α )<ρ ⎠
i,j
j,i
j
i
j
i
j
×
j =i
1tiI I ≤tjI I + 1tiI I >tjI I 1(F I I −I I /|T I I −RI I |α )<ρ
i,j
i
j
1(F I I −I I /|T I I −RI I |α )<ρ .
j,i
j
(18)
i
The explanations of these formulas are the same as in the passive
mode, except for the sensed signal. Take for example (17); the
second term inside the product says that whenever the timer of
TiI is larger than that of TjI , the signal from TiI sensed by RjI
and the signal from TjI sensed by RiI should not exceed ρ. The
other formula can be explained in the same way.
4.1.3. Transmission model
As in the previous models, transmission is successful iff its SINR
is larger than a preset threshold T . The SINR of each user is as
follows:
(i) For PU TiI in the passive mode:
SINRIp,i =
I −I
/|TiI − RiI |α
Fi,i
W (RiI ) +
+
I
I
p (Ri )
I
II
p (Ri )
.
(ii) For SU TiI I in the passive mode:
j =i
I
SINRIp,i
=
× 1tiI I ≤tjI I + 1tiI I >tjI I 1(GI I −I I /|T I I −T I I |α )<ρ .
j,i
1tiI ≤tjI + 1tiI >tjI 1(F I −I /|T I −RI |α )<ρ
j =i
j
(15)
⎛
(i) For a primary transmitter TiI :
j
I I −I I
/|TiI I − RiI I |α
Fi,i
W (RiI I ) +
II
I
p (Ri )
+
II
II
p (Ri )
.
i
(16)
In the above formulas, ρ is a preset parameter determining how
sensitive the CS should be. In (15), the first term inside the
product corresponds to the case where the timer of TiI is smaller
than that of TjI . The second term corresponds to the case where
the timer of TiI is larger than that of TjI , but the signal from TjI
sensed by TiI is smaller than the threshold ρ. For (16), the first
product corresponds to the condition that an SU must not sense
the presence of any PU. The explanation for the second product
is the same as that of (15).
Active mode. In the active mode, the receivers can send
beacons and therefore the CS can be carried out more efficiently.
The retain indicators in this case are as follows:
(iii) For PU TiI in the active mode:
SINRIa,i =
I −I
/|TiI − RiI |α
Fi,i
W (RiI ) +
I
I
a (Ri )
+
I
II
a (Ri )
.
(iv) For SU TiI I in the active mode:
SINRIa,iI =
I I −I I
/|TiI I − RiI I |α
Fi,i
W (RiI I ) +
II
I
a (Ri )
+
II
II
a (Ri )
.
Here, W (·) is the thermal noise process, which is assumed to
be independent of all other elements of the model. Also pI (·),
I
II
II
a (·), p (·), a (·) are the aggregated interference from PUs
in active mode, from PUs in the passive mode, from SUs in the
The Computer Journal, Vol. 55 No. 5, 2012
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
(ii) I = {TiI I } denotes the position of the SUs. Each user
has an intended receiver RiI I uniformly distributed in
the circle of radius r centered at this user;
(iii) {tiI }, {tiI I } are i.i.d. r.v.s representing the timers of PUs
and SUs, which are used by the CSMA protocol. They
are uniformly distributed in [0, 1];
I −I
I −I I
I I −I
(iv) FI −I I = {Fi,j
},
}, FI I −I = {Fi,j
}, FI −I = {Fi,j
I I −I I
I −I I
I I −I
I −I
I I −I I
I I −I I
}: Fi,j
(Fi,j , Fi,j , Fi,j
)
= {Fi,j
F
I
is the fading of the channel from transmitter Ti to
receiver RjI I (from transmitter TiI I to receiver RjI ,
from transmitter TiI to receiver RjI , from transmitter
TiI I to receiver RjI I , respectively);
(v) GI −I = {GIi,j−I }, GI I −I I = {GIi,jI −I I }, GI −I I =
{GIi,j−I I }: GIi,j−I (GIi,jI −I I , GIi,j−I I ) is the fading of the
channel from transmitter TiI to transmitter TjI (from
transmitter TiI I to transmitter TjI I , from transmitter
TiI to transmitter TjI I , respectively). These fading
variables are used in the passive mode.
543
A Stochastic Geometry Model for Cognitive Radio Networks
active mode and from SUs in the passive mode, respectively.
These interferences can be expressed as follows:
I −I
I
I
I
Up,j
Fj,i
/|TjI − RiI |α ,
p (Ri ) =
for SUs, with
N̄0 =
=
I −I I
I
Up,j
Fj,i
/|TjI − RiI I |α ,
=
I I −I
II
Up,j
Fj,i
/|TjI I − RiI |α ,
j
II
II
p (Ri )
=
I I −I I
II
Up,j
Fj,i
/|TjI I − RiI I |α ,
I
I
a (Ri )
=
I −I
I
/|TjI − RiI |α ,
Ua,j
Fj,i
j =i
I
II
a (Ri )
=
I −I I
I
Ua,j
Fj,i
/|TjI
−
II
I
a (Ri )
=
=
I I I I −I I
Ua,j
Fj,i /|TjI I
−
0
RiI I |α .
0
⎤
1t≤tjI + 1t>tjI 1GI −I <ρ|T I |α ⎦ dt
0,j
0,j
1
=
E0 [(1 − t) + t (1 − e−μρ|Tj | )]dt
1 α
e−λ
I
α
R2
(1−((1−t)+t (1−e−μρ|x| )))dx
1
=
e−tλ
I
α
R2
e−μρ|x| dx
dt
0
=
1 − exp{−λI N0 }
λI N0
(22)
.
For the case of an SU T0I I , doing similarly, we get
I
I
pp,MAP
(λI , λI I ) = P[Up,i
= 1]
II
II
pp,MAP
(λI , λI I ) = P[Up,i
= 1],
respectively. The independently marked homogeneous PPP is
both stationary and ergodic. Hence this probability is also the
proportion of PUs and SUs in the network who gain access to the
medium. If there is enough mobility, this is also the proportion of
time, namely the frequency, with which each given user accesses
the channel (see the high mobility discussion in [14]). As stated
before, a user is granted access to the carrier iff it has the smallest
timer among its contenders.
II
P0 (Up,0
= 1)
⎡⎛
II
= E0 [Up,0
] = E0 ⎣⎝
⎞
1(GI −I I /|T I I −T I |α )<ρ ⎠
0
0,j
j
j
×
j =0
⎤
(1t0I I ≤tjI I + 1t0I I >tjI I 1(GI I −I I /|T I I −T I I |α )<ρ )⎦
0,j
⎡
= E0 ⎣
Proposition 13. The MAP for a typical user is
0
j
⎤
1GI −I I <ρ|T I |α ⎦ E0
0,j
j
j
⎡
−λI N̄0
1−e
=
λI N̄0
,
(19)
×⎣
j =0
for PUs and
1 − e−λ N̄0 −λI N̄0
e
.
λI I N̄0
dt
0
4.2.1. Passive mode
MAP. In Aloha-like protocols, the MAP is a preset constant. In
Cognitive-CSMA, this probability is not given a priori and has
to be determined. For a typical PU and SUs, these probabilities
in the passive mode are
II
II
pp,MAP
(λI , λI I ) =
j
0
The aim of this section is again to investigate the MAP, COP
and TT. We begin with the passive mode.
I
pp,MAP
(λI , λI I )
j
⎡
⎤
E0 ⎣ E 1t≤tjI + 1t>tjI 1GI −I <ρ|T I |α ⎦ dt
j =0
1
=
Performance analysis
E0 ⎣
j
j =0
1
=
j =i
4.2.
1
=
I I I I −I
Ua,j
Fj,i /|TjI I − RiI |α ,
j
II
II
a (Ri )
⎡
j
0
0,j
j =0
RiI I |α ,
(20)
⎤
(1t0I I ≤tjI I + 1t0I I >tjI I 1GI I −I I <ρ|T I I |α )⎦ .
0,j
j
In the last equality, we have used the fact that I and I I
are independent. The first term in the last expression can be
The Computer Journal, Vol. 55 No. 5, 2012
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
I
I
P0 (Up,0
= 1) = E0 [Up,0
]
⎡
⎤
= E0 ⎣
1t0I ≤tjI + 1t0I >tjI 1(GI −I /|T I −T I |α )<ρ ⎦
j =i
(21)
Proof. W.l.o.g. we can assume that the typical user is located at
the origin and that the point process of the other users forms a
Poisson point process (Slivnyak’s Theorem). Consider first the
case of a PU T0I . Then, under the Palm distribution P0 ,
j
II
I
p (Ri )
α
R2
j =i
I
II
p (Ri )
e−μρ|x| dx.
544
T.V. Nguyen and F. Baccelli
computed as
⎡
⎤
⎡
⎤
E0 ⎣ 1GI −I I <ρ|T I |α⎦ = E0 ⎣ E[1GI −I I <ρ|T I |α ]⎦
0,j
0,j
j
j
j
j
⎡
⎤
I
α
= E0 ⎣ (1 − e−μρ|Tj | )⎦
j
α
= exp −λI (1 − (1 − e−μρ|x| ))dx
R2
= exp{−λ N0 }.
I
j =0
=
0
j
0
1 − exp{−λI I N0 }
λ I I N0
j
G0,j
<ρ|Tj |
.
Fi,i /r α
W (Ri ) + p (Ri )
Fj,i
Up,j
.
p (Ri ) =
α
|T
j − Ri |
j =i
SINRp,i =
The idea now is to approximate the process of retained users
by an inhomogeneous PPP. For this, we need the following
proposition.
Combining these gives us
II
P0 (Up,0
= 1) = exp{−λI N0 }
j =i
1 − exp{−λI I N0 }
.
λI I N 0
As clear from the physics of Cognitive-CSMA, the MAP of
PUs is exactly the same as the MAP of a user in a CSMA network
with only the PUs. Equation (20) gives us the impact of PUs on
the MAP of SUs. Simple calculations show that an SU always
has a smaller MAP than a user in a regular CSMA network of the
same intensity. Moreover, if the PU population is already dense
(large λI I ), then the loss incurred by SUs can be quite large.
COP and throughput. Since the p.p.s in our model are
stationary, the COP is the same for each PU (and the same
for each SU). Hence we can express the COPs using Palm
distributions as follows:
Proposition 14. Assume Rayleigh fading. Conditional on
the fact that the network has two users i and j such that
Xi − Xj = x, and the fact that user i with virtual timer ti = t
is retained by the Cognitive-CSMA protocol, the probability
hp (λ, x, t) that the protocol also retains user j is
1 − e−tλζp (x)
1 − e(1−t)λN0
+ e−tλg(x)
λζp (x)
λN0
1 − e−μρ|x|
,
1 − te−μρ|x|α
(25)
α
where ζp (x) is defined as
α
α
ζp (x) =
e−μρ|y| (1 − e−μρ|y−x| )dy.
(26)
R2
Proof. The proof can be found in Appendix A.1
(i) For a typical PU T0I :
I
pp,COP
(λI , λI I ) = P0 (SINRIp,0 > T ).
(23)
(ii) For a typical SU T0I I :
II
pp,COP
(λI , λI I ) = P0 (SINRIp,0 > T ).
(24)
Unfortunately, the distribution of the interference created by
the retained nodes is not known in closed form and we have
to resort to an approximation to compute this COP. For this
approximation, in order to have a more unified view on the
network, we consider = I ∪ I I as the process of all users
in the network, which is a PPP of intensity λ = λI + λI I . For
each user in , we define its virtual timer as follows:
This suggests to approximate the Palm distribution of M ,
conditioned on the timer t of the user at the center, by an
inhomogeneous PPP with intensity λhp (λ, x, t)dx and λ =
λI + λI I .
Proposition 15. If, conditioned on the fact that the network
has a user at the center with virtual timer t, we approximate
the process of the remaining transmitters by an inhomogeneous
PPP of intensity measure λhp (λ, x, t)dx, the COP of PUs and
SUs are respectively:
(i) for PUs:
I
(λI , λI I ) =
pp,COP
(i) If this is a PU TiI , then the virtual timer is tiI λI /λ.
(ii) If this is a SU TiI I , then the virtual timer is λI /λ +
tiI I λI I /λ.
The Computer Journal, Vol. 55 No. 5, 2012
λ
LW (μT r α )
λI
1
= I LW (μT r α )
λ
λI /λ
e−ϒp (λ,t) dt
0
0
λI
e−ϒp (λ,t/λ) dt,
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
For the second term, proceeding as in the case of PU, we get
⎤
⎡
E0 ⎣ (1t I I ≤t I I + 1t I I >t I I 1 I I −I I
I I α )⎦
The virtual timers defined in this way are uniformly distributed
on [0, 1] and this network becomes a CSMA network where
PUs play the role of users having a timer smaller than λI /λ and
SUs play the role of users having a timer larger than λI /λ.
Due to the fact that a user is primary or secondary is
determined by its virtual timer, we can drop all the superscripts
I and I I . So, in the new notation, a user Ti in has virtual
timer ti . The fading from Ti to Tj is Gi,j , which is equal to Gj,i .
The fading from Ti to Rj is Fi,j . As above, all fading variables
are independent exponential r.v.s of parameter μ. The retain
indicator and the SINR of Ti are as follows:
Up,i =
1ti <tj + 1tj ≤ti 1(Gi,j /|Ti −Tj |α )<ρ
545
A Stochastic Geometry Model for Cognitive Radio Networks
(ii) for SUs:
II
pp,COP
(λI , λI I ) =
λ
LW (μT r α )
λI I
=
1
LW (μT r α )
λI I
where:
ϒp (λ, t) =
R2
Corollary 1. In the passive mode, the spatial densities of
throughput of primary and SUs are as follows:
1
e−ϒp (λ,t) dt
λI /λ
λ
(i) For PUs:
e−ϒp (λ,t/λ) dt,
SpI (λI , λI I ) = λLW (μT r α )
λI
T rα
Tr
λhp (λ, y, t)dy.
+ |y − rl(0)|α
Note that ζa (x) = ζ (x ) if |x| = |x |, we have that hp (λ, x, t) =
hp (λ, x , t) if |x| = |x |. By a rotation of angle −θ, denoted by
S−θ (·), we have
T rα
λh(λ, y, t)dy
α
α
R2 T r + |y − rl(θ )|
T rα
=
λh(λ, S−θ (y), t)dS−θ (y)
2 T r α + |S−θ (y) − rl(0)|α
R
T rα
=
λh(λ, y, t)dy = ϒp (λ, t).
α
α
R2 T r + |y − rl(0)|
We can then compute
I
pCOP
(λI , λI I ) = Po SINR0 > T |t0 <
λ
LW (μT r α )
λI
λI /λ
I
λ
λ
e−ϒp (λ,t) dt.
(ii) For SUs:
e−λtN0 e−ϒp (λ,t) dt
λI /λ
λ
−tN0 −ϒp (λ,t/λ)
e
e
dt.
λI
with λ = λI + λI I .
Proof. To compute these values, we first fix a 1 × 1 square C
containing the center o of the plane. Since is stationary, the
densities of throughput are respectively:
⎤
⎡
SpI (λI , λI I ) = E ⎣
1Ti ∈C 1Ui =1 1SINRi >T 1ti <λI /λ ⎦
Ti ∈
= λEo [1U0 =1 1SINR0 >T 1t0 <λI /λ ]
⎤
⎡
SpI I (λI , λI I ) = E ⎣
1Xi ∈C 1Ui =1 1SINRi >T 1ti ≥λI /λ ⎦
Ti ∈
= λEo [1U0 =1 1SINR0 >T 1t0 ≥λI /λ ].
(27)
For the PUs:
Eo [1U0 =1 1SINR0 >T 1t0 <λI /λ ]
λI /λ
Eo [1U0 =1 1SINR0 >T |t0 = t]dt
=
0
=
One may also be interested in the global performance of each
class in the network. This can be quantified using the notion
of Spatial Density of Throughput (SDT), which generalizes TT
to the present stationary setting. This is defined as the mean
number of successfully transmitted packets in each class per
time slot and per unit surface. It is measured in packets/s/m2 .
This tells us how fast the network functions on a global scale.
1
α
= LW (μT r α )
λI
II
pCOP
(λI , λI I ) = Po SINR0 > T |t0 ≥
λ
1
λ
e−ϒp (λ,t) dt.
= I I LW (μT r α )
λ
λI /λ
= λLW (μT r )
SpI I (λI , λI I )
0
And similarly for SUs
e−tN0 e−ϒp (λ,t/λ) dt.
λI /λ
Po (Ui = 1|t0 = t)Po (SINR0 > T |t0 = t)dt
0
= LW (μT r )
α
λI /λ
e−λtN0 e−ϒp (λ,t) dt.
0
In the third equality we have used the fact that U0 and SINR0
are independent conditioned on t0 . The formula for SpI follows
directly. The case of SUs is treated in a similar way.
4.2.2. Active mode
MAP. The MAPs of a typical PU and SU in the active mode are
I
I
pa,MAP
(λI , λI I ) = P(Ua,i
= 1)
II
II
pa,MAP
(λI , λI I ) = P(Ua,i
= 1),
respectively.
The Computer Journal, Vol. 55 No. 5, 2012
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
Po (SINR0 > T |t0 = t)
T rα
1 2π
exp −
λh(λ, y, t)dy dθ.
≈
α
α
2π 0
R2 T r + |y − rl(θ )|
e−λtN0 e−ϒp (λ,t) dt
0
Proof. We first compute the COP of a typical user conditioned
on its timer t. Proceeding as in Proposition 2 and using the fact
that the receiver is uniformly distributed on the cicle of radius
r centered at o, we have
=
0
λI
= LW (μT r α )
α
λI /λ
546
T.V. Nguyen and F. Baccelli
Proposition 16. The MAP for a typical user is
I
pa,MAP
(λI , λI I )
1 − exp{−λI M̄0 }
,
λI M̄0
(28)
j =i
=
(1 − 1ti ≥tj 1C (Ti ,Tj ) ),
for PUs and
1 − e−λ M̄0 −λI N̄0
e
λI I M̄0
j =i
II
II
(λI , λI I ) =
pa,MAP
(29)
for SUs, with
M̄0 =
R2
(1 − (1 − e−μρ|y−rl(0)| )σ (0, y))dy,
α
1
α
(1 − e−μρ|y+rl(θ)−x| )dθ.
2π
(30)
Fi,j
Fj,i
C(Ti , Tj ) :=
> ρ OR
>ρ ,
|Ti − Rj |α
|Tj − Ti |α
Fi,i /r α
SINRi =
,
W (Ri ) + a (Ri )
Ua,j Fj,i /|Tj − Ri |α .
a (Ri ) =
j =i
(31)
In the active mode, we also have the following proposition
regarding the second moment of the process of retained users.
Proof. We first compute
Po (U0I = 1|R0I , t0I )
⎡
I
= Eo [Up,0
|R0I , t0I ] = Eo ⎣
j =0
(1t0I ≤tjI + 1t0I >tjI
1(F I −I /|T I −RI |α )<ρ 1(F I −I /|T I −RI |α )<ρ )
0
0
j
0,j
j,0
j
⎡
⎤
I
I α
= Eo ⎣ (1 − t0I + t0I (1 − e−μρ|Tj −R0 | )σ (0, TjI ))⎦
j =0
I α
I I
= exp −λ t0
(1 − (1 − e−μρ|y−R0 | )σ (0, y))dy .
R2
Since R0I is uniformly distributed on the circle of radius centered
at o, one can express R0I = rl(θ0I ), with θ0 uniformly distributed
on [0, 2π] and with l(·) introduced in Section 2.1. Note that
σ (0, y) = σ (0, y ) for any y such that |y | = |y|. Thus, by a
rotation S−θ0I , one can prove that
(1 − (1 − e−μρ|y−rl(θ0 )| )σ (0, y))dy
α
(1 − (1 − e−μρ|y−rl(0)| )σ (0, y))dy = M0 .
=
I
α
R2
R2
Hence
I
(λI , λI I ) = Po (U0I = 1|R0I , t0I )
pa,MAP
1
1 − exp{−λI M̄0 }
=
exp{−λI tM0 }dt =
.
λI M̄0
0
For SUs, using the same kind of arguments as in the proof of
Proposition 13 and in the first part of this proof gives us the
required result. The proof is long but contains no important
ideas and is hence omitted.
COP and throughput. For analyzing the COP and throughput
under the active mode, we consider again the modified model
Proposition 17. Conditioned on the fact that the network
has two users i and j such that Ti − Tj = x, Ri = Ti + rl(θ ),
Rj = Tj +rl(θ ), and the fact that user i with virtual timer ti = t
is retained by the Cognitive-CSMA protocol, the probability
ha (λ, x, t, θ, θ ) that the protocol also retains user j is
1 − e−tλζa (x,θ,θ )
1 − e(1−t)λM0
+ e−tλζa (x,θ,θ )
λζa (x, θ, θ )
λM0
(1 − e−μρ|x−rl(θ )| )(1 − e−μρ|x+rl(θ )| )
×
,
(1 − t + t (1 − e−μρ|x−rl(θ )|α )(1 − e−μρ|x+rl(θ )|α ))
(32)
α
α
where ζa (x, θ, θ ) is defined as
α
ζa (x, θ, θ ) = −M0 +
(1 − κ(0, x, y)(1 − e−μρ|y−rl(θ )| )
R2
−μρ|y−x−rl(θ )|α
× (1 − e
))dy,
2π
1
α
(1 − e−μρ|x−z−rl(θ )| )
κ(x, y, z) =
2π 0
α
× (1 − e−μρ|y−z−rl(θ )| )dθ.
(33)
(34)
Proof. The proof can be found in Appendix A.2.
The above result suggests that, conditioned on a typical user
T0 at the center of the plane that has an intended receiver at
R0 = rl(θ ) and a virtual timer t0 = t, we can approximate the
process of remaining retained users as an inhomogeneous PPP
2π
1
of intensity measure λ 2π
0 ha (λ, x, t, θ, θ )dθ . Then, using
Theorem 2.1, we have the follows:
Proposition 18. Conditioned on the fact that a typical user
T0 at the center of the plane which has an intended receiver at
R0 = rl(θ ) and a virtual timer t0 = t, when approximating the
process of remaining retained points by an inhomogeneous PPP
2π
1
of intensity measure λ 2π
0 ha (λ, x, t, θ, θ )dθ , the COP of
a typical primary and SU‘is:
The Computer Journal, Vol. 55 No. 5, 2012
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
σ (x, y) =
with virtual timers. The notation in this modified model is
as follows:
(1ti <tj + 1ti ≥tj (1 − 1C (Ti ,Tj ) )))
Ua,i =
547
A Stochastic Geometry Model for Cognitive Radio Networks
(i) For PUs:
I
pa,COP
(λI , λI I ) =
λ
λI
1
= I
λ
λI /λ
LW (μT r α )e−ϒa (λ,t) dt
0
λI
LW (μT r α )e−ϒa (λ,t/λ) dt.
0
(ii) For SUs:
I
pa,COP
(λI , λI I ) =
=
λ
λI I
1
λI I
1
λI /λ
λ
LW (μT r α )e−ϒa (λ,t) dt
lim ϒa (λ, t/λ) = Υa (t)
2π
g(y − rl(0), r)
=
2
2π
R
0
λ→∞
LW (μT r α )e−ϒa (λ,t/λ) dt,
with:
×
2π
0 ha (λ, x, t, θ, θ )dθ
dy
2π(1 − e−μρ|y−rl(θ )|α )
2π
ha (λ, x, t, 0, θ )dθ
dy.
g(y − rl(0), r) 0
=λ
2π(1 − e−μρ|y−rl(0)|α )
R2
ϒa (λ, t) = λ
R2
g(y − rl(θ ), r)
Proof. This proof is similar to that of Proposition 15.
For the SDT, we have the following corollary:
Corollary 2. In the active mode, the SDT of the two classes
are as follows:
(i) For PUs:
−α
1 − t + t (1 − e−μρ|y+rl(θ )| )
−α
(1 − e−μρ|y−rl(0)| )
1 − e−tζa (x,0,θ )
e−tζa (x,0,θ )
dθ dy,
+
ζa (x, 0, θ )
M0
I
LW (μT r α ) λ −Υa (t)
I
(λI , λI I ) =
e
dt,
lim pa,COP
λI
λI I →∞
0
II
lim pa,COP
(λI , λI I ) = 0.
×
λI I →∞
The corresponding limits for the passive mode are
lim ϒp (λ, t/λ)
1 − e−tζp (x)
e−tζp (x)
+
= Υp (t) =
ζp (x)
M0
R2
α
T r α (1 − e−μρ|y| )
×
dy,
(1 − te−μρ|y|α )(T r α + |y − rl(0)|α )
I
LW (μT r α ) λ −Υp (t)
I
I
II
e
dt,
lim pp,COP (λ , λ ) =
λI
λI I →∞
0
II
lim pp,COP
(λI , λI I ) = 0.
λ→∞
SaI (λI , λI I ) = LW (μT r α )λ
λI /λ
0
λI
= LW (μT r )
α
e−λtM0 e−ϒa (λ,t) dt
e−tM0 e−ϒa (λ,t/λ) dt.
0
(ii) For SUs:
SaI I (λI , λI I ) = LW (μT r α )λ
= LW (μT r α )
1
e−λtM0 e−ϒa (λ,t) dt
λI /λ
λ
−tM0 −ϒa (λ,t/λ)
e
e
λI I →∞
For any L such that
dt.
λI
Proof. This proof is similar to that of Corollary 1.
4.3.
−α
1 − e−μρ|y+rl(θ )|
Cognitive guarantee
A quick review of the formulas of the three performance metrics
shows that they depend on the two key system parameters (λI
and λI I ) in a same way for both the passive and the active mode.
Thus, we only discuss cognitive guarantee policies for the active
mode.
(i) MAP: The MAP of PUs is not affected by the SUs.
Cognitive -CSMA offers a perfect guarantee for PUs
in term of medium access in the sense that if a PU is
I
pa,COP
(λI , 0)
LW (μT r α )
>L>
λI
λI
e−Υa (t) dt,
0
there exists a unique λ∗a,COP such that
I
pa,COP
(λI , λ∗a,COP ) = L. The SUs must use an
ALOHA-like MAC protocol to guarantee that their
intensity does not exceed λ∗a,COP .
(iii) SDT: Since SaI (λI , λI I ) is decreasing in λI I and
λI
lim SaI (λI , λI I ) = LW (μT r α )
e−tλM0 e−Υa (t) dt,
λI I →∞
0
we have that, for any L such that
SaI (λI , 0) > L > LW (μT r α )
The Computer Journal, Vol. 55 No. 5, 2012
0
λI
e−tλM0 e−Υa (t) dt,
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
λI
selected by the CSMA protocol without an SU, it is still
selected by cognitive-CSMA in the presence of SUs. As
I
for SUs, their MAP is e−λ M0 times smaller than their
MAP in the case where there is no PU.
(ii) COP: Since ϒa (λ, t/λ) is decreasing in λ, it follows
I
II
(λI , λI I ) and pa,COP
(λI , λI I ) are decreasing
that pa,COP
II
functions of λ . Thus, increasing the population of SUs
always has a negative effect on the COP of both PUs and
SU. Moreover,
548
T.V. Nguyen and F. Baccelli
there is a unique λ∗a,S such that SaI (λI , λI I ) = L.
To guarantee that the SDT of the PUs is at least
L, the intensity of SUs must not exceed λ∗a,S . Given
this constraint, the SUs optimize their performance by
maximizing SDT SaI I (λI , λI I ).
1.8
ϒa(.1,t)
1.6
ϒp(.1,t)
1.4
1.2
4.4.
Some comparisons
1
R2
In the first inequality we have used the fact that σ (0, x) < 1.
In the last equality, we used a change of variable from x to
x −l(0). The formulas for the MAP of active and passive modes
have the same structure with respect to N̄0 and M0 , which are
decreasing functions. So for both primary and SUs, the MAP is
always larger in the passive mode than in the active mode.
We now compare the COP and the SDT of a typical user in
both modes. The noise terms are the same in both formulas. So,
for the sake of simplicity, we just consider the case without
noise. For this comparison, due to the complexity of the
formulas, we have to rely on numerical methods. For the active
mode, we can assume that r is very small compared with the
network scale (i.e. r ≈ 0). One can then assume that the position
of the transmitter and receiver are identical. The formulas for
the active mode can be simplified to
α
M0 =
1 − (1 − e−μρ|x| )2 dx,
2
R
α
α
ζa (x) =
(1 − e−μρ|y| )2 (1 − (1 − e−μρ|y−x| )2 )dy,
R2
ha (x, λ, t) =
1 − e−λtM0
1 − e−λtζa (x)
+ e−λtζa (x)
λtζa (x)
λtM0
(1 − e−μρ|x| )2
×
,
1 − t + t (1 − e−μρ|x|α )2
g(x, r)
ϒa (λ, t) =
h (x, λ, t)dx.
−μρ|x|α a
R2 1 − e
α
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
t
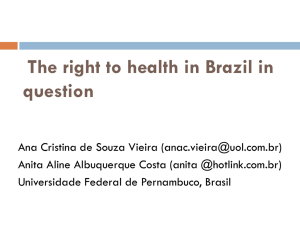
FIGURE 3. Plot of ϒp (.1, t) and ϒa (.1, t), the other parameters are
μ = 10, α = 3, r = 1, T = 15. One can see that ϒp (.1, t) is around
50% larger than ϒa (.1, t).
0.8
e−ϒa(.1,t)
0.7
e−ϒa(.1,t)
0.6
0.5
0.4
0.3
0.2
0.1
0
0.2
0.4
0.6
0.8
1
t
FIGURE 4. Plot of e−ϒp (.1,t) and e−ϒp (.1,t) . The set of parameters
is the same as that of Fig. 3.
Apart from these changes, the formulas of the COP and the
SDT are kept unchanged. For the following set of parameters:
λ = .1, μ = 10, α = 3, r = 1, T = 15, ϒp (λ, t) and ϒa (λ, t)
are plotted versus t in Fig. 3.
From this plot one can see that ϒp (.1, t) is approximately
50% larger than ϒa (.1, t). To see how this difference impacts
the COP and the SDT, we make a plot of e−ϒp (.1,t) and
e−ϒp (.1,t) , which are essential in the computing of the
COP and the SDT in Fig. 4. Then we can consider a
cognitive-CSMA network with total user intensity λ =
λI + λI I = .1 and let λI /λ be the proportion of
I
I
PUs in this network. Then pp,COP
(λI , λI I ), pa,COP
(λI , λI I ),
II
II
I
II
I
II
pp,COP (λ , λ ), pa,COP (λ , λ ) are plotted versus λI /λ in
The Computer Journal, Vol. 55 No. 5, 2012
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
As stated at the beginning of the section, the aim of the active
mode is to better control interference. It achieves this aim by
requiring both the transmitter and receiver to sense the network.
Thus, in the active mode, users are more conservative and cause
much less interference to other users. The aim of this subsection
is to compare the active and passive modes using the analytical
results obtained above.
Let us begin with the MAP. In the active mode, both the
transmitter and the receiver sense the network to guarantee (a)
that no user can harm the transmission (receiver sensing) and (b)
that the transmission does not interfere with others (transmitter
sensing). As a consequence, the MAP of a user is smaller in the
active mode than in the passive mode. This can be quantified by
comparing N̄0 and M̄0 . Note that
α
M0 =
1 − σ (0, x)(1 − e−μρ|x−rl(0)| )dx
2
R
α
>
1 − (1 − e−μρ|x−rl(0)| )dx = N̄0 .
A Stochastic Geometry Model for Cognitive Radio Networks
549
0.8
5.
0.7
The main contribution of this paper is the outline of a generic
probabilistic framework based on stochastic geometry for the
analysis of distributed MAC protocols used in cognitive radio
networks. As shown in this paper, this framework has the
potential of allowing the modeling and the optimization of a
large variety of other network architectures and MAC protocols.
Another contribution of the present paper is the tuning of a
fully distributed CSMA-based MAC protocol allowing SUs of
a large network to exploit unused spectrum and to comply with
predefined requirements on the acceptable impact on PUs. The
active version of this protocol using the RTS-CTS handshake
technique provides the best interference control and the best
utilization of the network resources (time, power, frequency).
Future work will bear upon as follows:
0.6
0.5
0.4
pIp,COP(λI,λII)
0.3
pIa,COP(λI,λII)
pIIp,COP(λI,λII)
0.2
pIIa,COP(λI,λII)
0
0.2
0.4
0.6
λI/(λI+λII)
0.8
1
FIGURE 5. Plot of COP of PUs and SUs in active and passive mode
versus λI /λ. The set of parameters is the same as that of Fig. 3.
0.4
0.35
0.3
0.25
SIp(λI,λII)
0.2
SIa(λI,λII)
0.15
SIIp(λI,λII)
0.1
SIIa(λI,λII)
0.05
0
0
0.2
0.4
0.6
λI/(λI+λII)
0.8
1
FIGURE 6. Plot of the SDT of PUs and SUs in the active and passive
mode versus λI /λ. The set of parameters is the same as that of Fig. 3.
Fig. 5, and SpI (λI , λI I ), SaI (λI , λI I ), SpI I (λI , λI I ), SaI I (λI , λI I )
are plotted versus λI /λ in Fig. 6. From these plots, with the
chosen set of parameters, the following conditions :
(i) For both PUs and SUs, the COP in the active mode
is larger than that in the passive mode (the increase is
appr. .1).
(ii) For both PUs and SUs, the SDT in the active mode is
around 40% larger than that in the passive mode. So, in
spite of offering less MAP, the active mode eventually
pays off in terms of the SDT by guaranteeing better
protection against interference.
(1) Power control. It might be useful to control the
transmission power and/or the sensing threshold of SUs
in order to further limit the interference they cause
to PUs. A simple scheme would simply make SUs
transmit at a power level lower than that of PUs. More
sophisticated schemes would make SUs decide on their
transmission power depending on the primary signal
strength.
(2) Refined schemes. The schemes proposed and analyzed
in the present paper are rather conservative: for instance,
in the presence of a PU, even when the latter is
silenced by another PU, an SU backs off. A refined
scheme would consist in using this momentary time
hole for the SU. It ought to be clear that there are
several interesting variants along these lines, which
offer different compromises between channel access
and coverage. Their analysis and comparison should
allow one to determine which one is actually the best
in terms of guarantees to PUs and throughput for SUs.
(3) Adaptive carrier sensing. In this paper we use a very
simple rule for users to detect contenders. This rule
leads to a waste of protected space when the user
channel is strong and to a lack of proper protection from
interference when the user channel is weak. One could
consider a more adaptive CS strategy, which makes the
contention radius of stronger users smaller and that of
weaker users larger.
(4) General priority laws. Here is an illustration of more
general priority schemes. Consider a population of users
belonging to n classes. Each class forms an independent
PPP The intensity of users of class i is λi . With class
i, one associates a distribution function with density hi
with support on [0, 1]. The users of all classes compete
for space using CSMA. This competition is represented
by a Matérn interaction based on timers with distribution
hi for class i. Users with a density hi more centered on
the left of the [0, 1] interval have an advantage compared
with those with density more centered on the right.
The Computer Journal, Vol. 55 No. 5, 2012
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
0.1
CONCLUSION
550
T.V. Nguyen and F. Baccelli
A special case is that with hi having its support on
[(i − 1)/n, i/n], which gives full priority of class
i on
class i + 1 for all i = 1, . . . , n − 1. Let λ = i λi .
Let pi denote the MAP of a typical user of class i and
M(x) denote the probability that a typical user retained
by the Matérn scheme (or more precisely the extension
with fading) based on a PPP of intensity x.
We have the following conservation rule, which can be seen
as an analog of Kleinrock’s conservation law, [16] for priority
queues:
n
λi
M(λ) =
(35)
pi .
λ
i=1
M(λ) =
λn
λ − λn
M(λ − λn ) + pn
λ
λ
...
M(λ1 + λ2 ) =
λ1
λ2
M(λ1 ) +
p2 .
λ1 + λ 2
λ1 + λ 2
APPENDIX
A.1.
REFERENCES
[1] FCC Spectrum Policy Task Force. (2002) Report of the Spectrum
Efficiency Working Group. FCC, Technical Report.
[2] Haykin, S. (2005) Cognitive radio: brain-empowered wireless
communications. IEEE J. Sel. Areas Commun., 23, 201–220.
[3] Le, L., Mitran, P. and Rosenberg, C. (2009) Queue-Aware
Subchannel and Power Allocation for Downlink OFDM-Based
Cognitive Radio Networks. IEEE WCNC 2009, Budapest, April.
[4] Mitran, P., Le, L., Rosenberg, C. and Girard, A. (2008) Resource
Allocation for Downlink Spectrum Sharing in Cognitive Radio
Networks. IEEE Vehicular Technology Conference (VTC),
September, Calgary, Canada.
[5] Urgaonkar, R. and Neely, M.J. (2008) Opportunistic Scheduling
with Reliability Guarantees in Cognitive Radio Networks. Proc.
IEEE INFOCOM, April 2008, Phoenix, AZ, USA.
[6] Wang, C., Sohraby, K., Jana, R., Ji, L. and Daneshmand, M.
(2009) Network selection in cognitive radio systems. IEEE
Globecom. Honolulu, Hi.
[7] Pitchaimani, M., Ewy, B.J. and Evans, J.B. (2007) Evaluating
Techniques for Network Layer Independence in Cognitive
Networks. IEEE CogNet 2007 Workshop, June, Glasgow,
Scotland.
[8] Raychaudhuri, D., Mandayam, N.B., Evans, J.B., Ewy, B.J.,
Seshan, S. and Steenkiste, P. (2006) CogNet—An Architecture
for Experimental Cognitive Radio Networks within the Future
Internet. MobiArch.
[9] Huang, K.C., Jing, X. and Raychaudhuri, D. (2009) MAC Protocol Adaptation in Cognitive Radio Networks: An Experimental
Study. Computer Communications and Networks, ICCCN 2009.
San Francisco, CA, USA.
[10] Zhang, Q., Fitzek, F.H.P. and Iversen, V.B. (2008) Cognitive radio
MAC protocol for WLAN. Personal, Indoor and Mobile Radio
Communications, PIMRC 2008. Cannes, France.
Proof of Proposition 14
W.l.o.g. we can assume that i = 0, j = 1, T0 = o, T1 = x (o is
the center of the plane). The quantity that we need to compute is
Eo,x [U0 U1 |t0 = t]
Po,x (U0 U1 = 1|t0 = t)
=
.
Po,x (U0 = 1|t0 = t)
Eo,x [U0 |t0 = t]
First, note that, for any i, j ,
1ti <tj + 1tj ≤ti 1(Gi,j /|Ti −Tj |α )<ρ = 1 − 1tj ≤ti 1(Gi,j /|Ti −Tj |α )≥ρ .
We can then compute the denominator as follows:
⎡
Eo,x [U0 |t0 = t] = Eo,x ⎣(1 − 1t1 ≤t0 1(G0,1 /|x|α )≥ρ )
j =0,1
⎤
× (1 − 1tj ≤t0 1(G0,j /|Tj |α )≥ρ )|t0 = t ⎦
⎡
= Eo,x ⎣(1 − te
−μρ|x|α
)
⎤
(1 − te
−μρ|Tj |α
j =0,1
= (1 − te−μρ|x| ) exp{−λtN0 }.
α
Now we move on to the numerator:
⎡
Eo,x [U0 U1 |t0 = t] = Eo,x ⎣(1 − 1t1 ≤t0 1(G0,1 /|x|α )≥ρ )
The Computer Journal, Vol. 55 No. 5, 2012
j =0,1
× (1 − 1tj ≤t0 1(G0,j /|Tj |α )≥ρ )
)⎦
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
As a direct corollary, in the full priority case, one can determine
the pi recursively through the equations
[11] Cheng, S. and Yang, Z. (2007) Energy-efficient power control
game for cognitive radio systems. SNPD. Quingdao, China.
[12] Zhang, R. (2008) Optimal power control over fading cognitive
radio channels by exploiting primary user csi. Proc. Globecom.
New Orleans, Louisiana, USA.
[13] Jafar, S.A. and Srinivasa, S. (2007) Capacity limits of cognitive
radio with distributed and dynamic spectral activity. IEEE JSAC,
25, 529–537.
[14] Baccelli, F. and Blaszczyszyn, B. (2009) Stochastic geometry
and wireless networks. URL for Volume I: http://hal.inria.fr/inria00403039 and for Volume II: http://hal.inria.fr/inria-00403040.
Foundation and Trend in Networking, NOW publisher.
[15] Stoyan, D., Kendall, W. and Mecke, J. (1996) Stochastic
Geometry and its Applications (2nd edn). Wiley, New York.
[16] Kleinrock, L. Queuing Systems. John Wiley & Sons, 1975.
[17] Nguyen, T.V. and Baccelli, F. (2010) A Probabilistic Model
of Carrier Sensing Based Cognitive Radio. Proc. 2010 IEEE
Symposium on New Frontiers in Dynamic Spectrum (DYSPAN),
pp. 1–12. Singapore.
551
A Stochastic Geometry Model for Cognitive Radio Networks
× (1 − 1t0 ≤t1 1(G0,1 /|x|α )≥ρ )
j =0,1
Now deconditioning on t1 gives us
⎤
Eo,x [U0 U1 |t0 = t] = (1 − e−μρ|x| )
t
1
−λ(tN0 +τg(x))
−λ(τ N0 +tg(x))
e
dτ +
e
dτ
×
α
× (1 − 1tj ≤t1 1(G1,j /|Tj −x|α )≥ρ )|t0 = t ⎦ .
0
t
−tλg(x)
1−e
λg(x)
= e−tλN0
Note that
(1−1t1 ≤t0 1(G0,1 /|x|α )≥ρ )(1−1t0 ≤t1 1(G0,1 /|x|α )≥ρ ) = 1(G0,1 /|x|α )<ρ .
We get
⎡
α
A.2.
j =0,1
W.l.o.g, we can assume that i = 0, j = 1 and T0 = o, T1 = x;
we then want to compute the following conditional probability:
⎤
Px,o (Ua,0 Ua,1 = 1|Ua,0 = 1, R0 = rl(θ ), t0 = t)
Px,o (Ua,0 Ua,1 = 1|R0 = rl(θ ), t0 = t)
=
.
Px,o (Ua,0 = 1|R0 = rl(θ ), t0 = t)
Since
We first compute the denominator:
(1 − 1tj ≤t0 1(G0,j /|Tj |α )≥ρ )(1 − 1tj ≤t1 1(G1,j /|Tj −x|α )≥ρ )
= (1 − 1tj ≤t0 1(G0,j /|Tj |α )≥ρ − 1tj ≤t1 1(G1,j /|Tj −x|α )≥ρ
Px,o (Ua,0 = 1|R0 = rl(θ ), t0 = t)
= Ex,o [Ua,0 |R0 = rl(θ ), t0 = t]
⎡
(1 − 1tj ≤t0 1C (Tj ,T0 ) )
= Ex,o ⎣(1 − 1t1 ≤t0 1C (T0 ,T1 ) )
+ 1tj ≤min{t0 ,t1 } 1(G0,j /|Tj |α )≥ρ 1(G1,j /|Tj −x|α )≥ρ ),
we have
= (1 − e−μρ|x| )Eo,x ⎣
α
⎤
α
⎤
−μρ(|Tj −x|α +|Tj |α )
Since
P(C(Ti , Tj )|Ri ) = 1 − σ (Ti , Tj )(1 − e−μρ|Tj −Ri | ),
α
R2
− min{t, τ }e
α
)⎦
α
α
α
= (1 − e−μρ|x| ) exp −λ
(te−μρ|y| + τ e−μρ|y−x|
−μρ(|y−x|α +|y|α )
j =0,1
× |R0 = rl(θ ), t0 = t ⎦ .
(1 − te−μρ|Tj | − τ e−μρ|Tj −x|
j =0,1
+ min{t, τ }e
).
Proof of Proposition 17
× (1 − 1tj ≤t1 1(G1,j /|Tj −x|α )≥ρ )|t0 = t ⎦ .
Eo,x [U0 U1 |t0 = t, t1 = τ ]
⎡
λN0
Dividing the formula for the numerator by that of the
denominator gives us the required result.
× (1 − 1tj ≤t0 1(G0,j /|Tj |α )≥ρ )
1 − e(1−t)λN0
and
P(C(Ti , Tj )|Ri , Rj ) = 1−(1−e−μρ|Ti −Rj | )(1−e−μρ|Tj −Ri | ),
α
α
)dy .
we have
Using the following equalities:
α
α
e−μρ|y| dy =
e−μρ|y−x| dy = N0 ,
2
2
R
R
−μρ(|y|α +|y−x|α )
e
dy = N0 − ζp (x),
R2
Px,o (Ua,0 |R0 = rl(θ ), t0 = t)
⎡
= Ex,o ⎣(1 − t (1 − (1 − e−μρ|x+rl(θ )| )(1 − e−μρ|x−R0 | )))
α
×
we get
α
⎤
(1 − t (1 − σ (0, Tj )(1 − e−μρ|Tj −R0 )))⎦
|α
j =0,1
α
= exp −λt
(1 − σ (0, y)(1 − e−μρ|y−R0 | )dy
Eo,x [U0 U1 |t0 = t, t1 = τ ]
= (1 − e−μρ|x| )e−λ((t+τ )N0 −min{t,τ }(N0 −ζp (x))) .
α
R2
× (1 − t (1 − (1 − e−μρ|x+rl(θ )| )(1 − e−μρ|x−R0 | ))).
The Computer Journal, Vol. 55 No. 5, 2012
α
α
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
Eo,x [U0 U1 |t0 = t] = E0,x ⎣(1 − e−μρ|x| )
× (1 − e
−μρ|x|α
+ e−tλg(x)
552
T.V. Nguyen and F. Baccelli
In the proof of Proposition 16, we have proved that
Thus
(1 − σ (0, y)(1 − e−μρ|y−R0 | )dy = M0 .
α
R2
Thus
Px,o (Ua,0 |R0 = rl(θ ), t0 = t) = exp{−λtM0 }
(1 − t (1 − (1 − e−μρ|x+rl(θ )| )(1 − e−μρ|x−rl(θ )| ))).
α
α
Px,o (Ua,0 Ua,1 = 1 | R0 = rl(θ ), R1 = x + rl(θ ), t0 = t, t1 )
α
= exp −λt
(1 − σ (0, y)(1 − e−μρ|y−rl(θ )| ))dy
2
R
α
× exp −λt1
(1 − σ (x, y)(1 − e−μρ|y−x−rl(θ )| ))dy
2
R
α
× exp −λ min{t, t1 }
(1 − σ (0, y)(1 − e−μρ|y−rl(θ )| )
−σ (x, y)(1 − e
We now move to the numerator:
R2
−μρ|y−x−rl(θ )|α
) + κ(0, x, Tj )
× (1 − e−μρ|Tj −rl(θ )| )(1 − e−μρ|Tj −x−rl(θ )| ))dy .
α
= Ex,o ⎣(1 − 1t1 ≤t0 1C (T0 ,T1 ) )(1 − 1t0 ≤t1 1C (T0 ,T1 ) )
×
(1 − 1tj ≤t0 1C (Tj ,T0 ) )
(1 − 1tj ≤t1 1C (Tj ,T1 ) )
j =0,1
j =0,1
⎤
×|R0 = rl(θ ), t0 = t, R1 = x + rl(θ )⎦
⎡
= Ex,o ⎣
Now, using the following equalities:
α
(1 − σ (0, y)(1 − e−μρ|y−rl(θ )| ))dy
2
R
α
=
(1 − σ (x, y)(1 − e−μρ|y−x−rl(θ )| ))dy
R2
α
= M0
(1 − σ (0, y)(1 − e−μρ|y−rl(θ )| ) − σ (x, y)
R2
× (1 − e−μρ|y−x−rl(θ )| )
α
+ κ(0, x, Tj )(1 − e−μρ|Tj −rl(θ )| )
α
(1 − 1tj ≤t0 1C (Tj ,T0 ) )(1 − 1tj ≤t1 1C (Tj ,T1 ) )
j =0,1
× (1 − e−μρ|Tj −x−rl(θ )| ))dy
α
⎤
= M0 − ζa (x, θ, θ ),
×1C (T0 ,T1 ) |R0 = rl(θ ), t0 = t, R1 = x + rl(θ )⎦ .
we have
Px,o (Ua,0 Ua,1 = 1|R0 = rl(θ ), R1 = x + rl(θ ), t0 = t, t1 )
Note that
= e−λ(t+t1 )M0 eλ min{t,t1 }(M0 −ζa (x,θ,θ )) .
E[(1 − 1tj ≤t0 1C (Tj ,T0 ) )(1 − 1tj ≤t1 1C (Tj ,T1 ) )
Deconditioning on t1 gives us
× |R0 = rl(θ ), t0 = t, R1 = x + rl(θ ), Tj ]
Px,o (Ua,0 Ua,1 = 1|R0 = rl(θ ), R1 = x + rl(θ ), t0 = t, t1 )
= 1 − t0 (1 − σ (0, Tj )(1 − e−μρ|Tj −rl(θ)| ))
α
− t1 (1 − σ (0, Tj )(1 − e−μρ|Tj −x−rl(θ )| ))
α
=
+ min{t0 , t1 }(1 − σ (0, Tj )(1 − e−μρ|Tj −rl(θ)| )
α
× (1 − e−μρ|x−rl(θ )| )(1 − e−μρ|x+rl(θ )| ).
α
− σ (x, Tj )(1 − e−μρ|Tj −x−rl(θ )| )
α
+ κ(0, x, Tj )(1 − e−μρ|Tj −rl(θ)| )(1 − e−μρ|Tj −x−rl(θ )| )).
α
1 − e−tλζa (x,θ,θ )
1 − e(1−t)λM0
+ e−tλζa (x,θ,θ )
λζa (x, θ, θ )
λM0
α
α
The proposition is derived directly from this.
The Computer Journal, Vol. 55 No. 5, 2012
Downloaded from http://comjnl.oxfordjournals.org/ at Pennsylvania State University on May 8, 2016
Px,o (Ua,0 Ua,1 = 1|R0 = rl(θ ), t0 = t)
= Ex,o [Ua,0 Ua,1 = 1|R0 = rl(θ ), t0 = t]
⎡
α