Chapter6
200
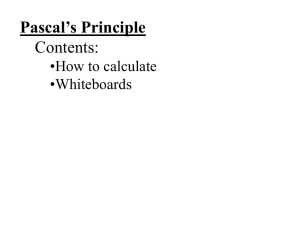
Figure 6-1 shows a materials handling application in which hydraulic cylinders
ur* or"i to drive the boom of a forklift truck operating on a rough terrain' On the
rough ground around building constructiol, operating a forklif,t, truck with a high
r*uJh r-equires a hig$r degree oi skill anci care. One of the most difficult operations in
this setting involyes inserting loads horizontally onto scaffolds In this system, automatic levJling and insertioJof the fork is accomplished with comPuter-controlled
electrohydrar]fcs. Pure horizontal motion of the fork is achieved by hydraulic cylinposiders coniinuously changing the boom angle and length.This is accomplished by
to
the
on-board
tion sensors located on tUe. boom. These sensors transmit signals
computer that respond by s&nding commands to the servo valves for controlling the
oil flow rate to the hydrauiic cylinders'
A hydraulic shock absorber is a deyice that brings a moving load to a gentle rest
through ti." ure of metered hydraulie fluid. Typically hydraulic shock absorbers use
orificis to meter internal oil flow to accomplish a uniform gentle deceleration of the
moving load.Two common applications of hydraulic shock absorbers are in moving
cranes and automobile suspension systems.
Figure 6-1.. Rough terrain forklift driver by hydraulic cyiinders. (Cowlesy
Nationsl Fluid Power Associtrtion, Milwar*ee, Wisconsin. )
of
l
Chapter6
200
Figure 6-1 shows a materials handling application in which hydraulic cylinders
ur* or"i to drive the boom of a forklift truck operating on a rough terrain' On the
rough ground around building constructiol, operating a forklif,t, truck with a high
r*uJh r-equires a hig$r degree oi skill anci care. One of the most difficult operations in
this setting involyes inserting loads horizontally onto scaffolds In this system, automatic levJling and insertioJof the fork is accomplished with comPuter-controlled
electrohydrar]fcs. Pure horizontal motion of the fork is achieved by hydraulic cylinposiders coniinuously changing the boom angle and length.This is accomplished by
to
the
on-board
tion sensors located on tUe. boom. These sensors transmit signals
computer that respond by s&nding commands to the servo valves for controlling the
oil flow rate to the hydrauiic cylinders'
A hydraulic shock absorber is a deyice that brings a moving load to a gentle rest
through ti." ure of metered hydraulie fluid. Typically hydraulic shock absorbers use
orificis to meter internal oil flow to accomplish a uniform gentle deceleration of the
moving load.Two common applications of hydraulic shock absorbers are in moving
cranes and automobile suspension systems.
Figure 6-1.. Rough terrain forklift driver by hydraulic cyiinders. (Cowlesy
Nationsl Fluid Power Associtrtion, Milwar*ee, Wisconsin. )
of
l
Hydraulic Cylinders and Cushioning Devices
6,2 HYDBAULIG CYLIIUDEH
201
OPERATITEG FEATURES
The simplest type of hydraulic cyiinder is the single-acting design, rvhich is shown
schematically in Figure 6-Z{a).It consists of a piston.inside a cylindrical housing
calied a barrel. Attached to one end of the piston is a rod, which exiends outside
one end of the cylinder (rod end). At the other end (b1ank end) is a port for the
entrance and exit of oil. A single-acting cylinder can exert a force in only the extending direction as fluid from the pump enters the blank end of the cylin(er. singleacting cylinders do Tot retract hydraulically. Retraction is accomplished by using
gravity or by the inClusion of a iompression spring in the rod
r'igure 6-z{b1
"no.
shows the graphic symbol of a single-acting cylinder.
A graphic symbol implies how a component operates without showing any of
its construction details.In drawing hydraulic circuits (as done in Chapter 9) graphic
symbols of all components are used. This facilitates circuit analysis and troubleshooting. The symbols, which are merely combinations of simple geometric figures such as circles, rectangles, and lines, make no attempt to show the internal
configuration of a component. However, symbols must clearly show the function of
each component.
Figure 6-3 shows the design of a double-acting hydraulic cyiinder. Such a cylinder can be extended and retracted hydrauiically.Thus, an output force can be applied
in trvo directions (extension and retraction). This particular cylinder has a woiking
pressure rating of 2000 psi for its smallest bore size of 1{ in and 800 psi tbr its largest
bore size of 8 in.
The nomenclature of a double-acting cylinder is provided in Figure 6-3. In this
design, the barrei is made of seamless steel tubing, honed to a fine finish on the inside.
The piston, which is made of ductiie iron, contains U-cup packings tb seal against
leakage between the piston and barrei. The ports are located in the end caps, which
are secured to the barrel by tie rods. The tapered cushion plungers provide smooth
deceleration at both ends of the stroke.Therefore, the piston cloes not bang into the
EXTENSiON
lL_
iii.
l
RETBACTION
rltlitIi
I111
t,t t i
irlrBABREL
LFR OM
PUM P
{a) SCHEMATIC DRAWTNG
Figure
l
6-2.
Single-acting hydlaLrlic c1,)ii.idei
(b) GfiAPHIC SYMBOL
i
.ri i
zaz
n<br
sFp9
u>=<
oa
rDn):r
l=i!
x Y' z''i
z<1,=
ACrl
r: o--1zu)
UJ
\,
c
omzo>
:i'En(/)
CT
H=!ei
rqli,i ix
o
p
c
aa\m
tT
fi"---{m
>naa1
-=^
nr
tn>
PA
a$
(J I
u cl
oo
5
I C
€
E m
-
m
:a c)
-l
:l
T
6.)
--l
lfl
v<
mu)
nr
2o
=<
zm
2
z
r
.) aT.
a Ia
U mr
o
z m IrE --1
v
() -o
C
=z
?@
ai
--l -m
m Io
g -v --l
_m
+m
-
ql.)-
plo
>r
Nfrm=e
q5E
Lma
o
:cj
-:iH<
m
=i6
6rn-
m
m:"1.1
,^M I V
=-
5-ig
o-
(l
I
m
o
go
:-
ru
_-r
Ir
m
-!
>C
.)T
x-u
CO
o
:
>tr
ZC
(,!
!
CIJ
^l-
>n
FE
gDZ
i4
+
G-
()'E
CJ
!{3
f<
Ei
5P
i(Y
cl1
aq
H=
vz
v
C
6}
o
c
o
*11
.E
s
lfl 2
lf)
E
o
z
c
{a
c,i-t{
C}I
-t
-{
-f,
6s
Oo
J-.
;
cD
,I
z
m
o
=-
S6Z
6.2
(-T
@
-l
o
o
o@
.Tt
IT
m
r
c(t{
gF
rE?
<J
>m
m
x,
c)
F
=o
=q
@-z
=g
q
2.
z6)
4)
m-i
618
or+
m;D
r)
5'o
m-tm
mzfr
UAn
D -.1.
loird;
o,
z<aT
OY
ra
m
m
*o
z.Tl
o
-J
2l-l-
13
s{
Om
-fr
=-:m
ZL
8E
m
Hydraulic Cylinders and Cushioning Devices
203
end caPS with excessive impact, which could damage the hydraulic
cylinder after a
given number of cycles.The graphic symbol for a clorible-acting
cylinder is also shown
in Figure 6-3.
O.
g ciu
ITD
EB lttlo uIlITI
Iu
Gs AIIT D
TI,I
EG HATuI
GAt tI
]II
KAG Es
various types of cylinder mountings are in existence, as illustrated
in Figure 6-4.
This permits versatility in the anchoring of cylinders. The rod
ends arJ usuaiiy
threaded so that they can be attached directiy to the load, a clevis,
a yoke, or some
other mating deyice.
Through'the use of various mechanical linkageg the applications
of hydraulic
cylinders are limited only by the ingenuity of the nriio po*"iiesigner.As
illustrated
in Figure 6-5, these linkages can trinsform a linear motion
into e"ither an oscillating
or rotary motion. In addition, linkages can also be employed
to increase or decrease
the effective Ieverage and stroke of a cyiinder.
FOOT AND
RECTANGULAR
CENTERLI NE
FLANGE MOUNI
LUG MOUNTS
TRUN-NION
MOUNi
INTERMEDIATE
TRUNNION
MOUNT
SQUARE FLANGE
MOUNT
CLEVIS MOIJNJ
FLUSH SIDE
MOUNT
EXTENDED
TIE ROD
Figure 6,4. Various cyJinder mountings. (Cotrtesy
Ranrl Corp.. Troy', Michigan.)
DOUBLE ROD END
oJ'
Sperry vickers, Sperrv
lfrllllllltl
204
Chapter 6
ilffii{
,ffiW
rlill
iii
iill
liili'
Scroid-d$t lrf?r
il
Ihir4.ito!3,rrl'
StdSrH;i! tilrurt rxru.?d
ili
i;i
';'l
il
$roiglrFlina rastion
rruttipttrd e:l
Sfaigltt p$rl
r
*otilot?al pamlkl motht
ruil
il
rli
j,ll
ll
,'
,,1
Jfij:['"1':'x, 'Tifll;,ffi:]f T'q"r'"'prs'r ,tr$l$iHf
Figure
6-5'
Rex n o r d
Typical mechanical linkages that can be combined
with hydraulic cyiinders. {courtesy
I n d us t r i es, Hy d r a u I ic
Co m p
oie
nts D
iv
is
rli,i
""4; l:t-
ion, Arii"i,
of
W;re
Much effort has been made by manufacturers of Irydrauric
cyrinders to reduce
eated as
;;*'rl; ;
liisarieni
:i::::::lr::;:;,,;;t.;;"#X1l"i;1;iiX',"**;'#J'Xilil;::l:l:
hyclraulic cylinder has a direcr bearing on-its life
universal alignment mountin-g accessory designed to
reduce misalignment
. -A
problems is illustrated in Figure o-0. ey using
one of thJse accessory components and
a mating clevis at each end of the cylinder (s-ee
Figure 6-6), the following benefits are
obtained:
1. Freer range of mounting positions
2. Reduced cylinder binding and side loading
3. Allowance for universal swivel
4. F.educed bearing and tube wear
5. Elimination of piston btow-by caused by misalignment
295
Hydraulic Cylinders and Cushioning Devices
alignment mounting accessory for fluid cylinders. (Courtesy
Sheffer Corp., Cincinnati, Ohio.)
Figure
6-6. Universal
of
+
uin
PISTGN
PISTON
DURING EXTENSION, THE ENTIBE PISTON
aRFA rA^) WHTCH lS SHOWN SHADED lN
rHr LovilLn VtEw, tS EXposED To.FLUID
PRESSUBE.
(a) EXTENSION STBOKE
DUBING RETBACTION, ONLY THE ANNULAF
ABEA-AROUND THE BOD (Ap-Art WHIGH
lS SHoWN SHADED JN THE LOWER VIEW,
IS EXPOSED TO FLUID PRESSURE.
{b} BETRACTION STBOKE
Figure 6-7. The effective areii of clouble-acting cylinrlers is grealer for the exterlsion
stroke than it is for the rett'action stloke.
6.II CYLIIUDEB
FOBGE, T'ELOCITY, A]UD POBUEA
The output force (F) and piston velocity (u) of doubie-acting cylinders are not the
sarne loi extension and retraction strokes. This is explained as foliolvs (in conjunction w'ith Figure 6-7): During the extension stlgke. fluid enters the blank end of the
cylinder through the entire circular alea of ihe piston (A,,). However. durin-q the
lilil,
lilllr
ti1,
itl
iri
;ii
tli
iii
iii
tii
I!
Chapter 6
206
ltli,i
i
iii
it.
1i
i'i
retraction stroke, fluid enters the rod end through the smaller annular area between
the rod and cylinder bore (A, - A),where A, equals the piston area and,4, equals
the rod area. This difference'in flow-path cross-sectional area accounts for the difference in piston velocities Since Ao i! greater than (4, - A),the retraction velocity is greater than the extension velocity for the same input flow rate" Similarty, during the extension stroke, fluid pressure bears on the entire circular area of the piston.iHowever, during the retraction stroke, fluid pressure bears oniy
on the smallei annular area between the piston rod and cylinder bore. This difference in area accounts for the difference in output forces. Since Ao is greater'than
(Ao A,), the extensionrforce is greater than the retraction force for the same
-
operating pressure. :
' equations (6-1) through (6-4) a11ow for the calculation of the output force and
velocity for the extension and retraction strokes of 100% efficient double-acting
cylinders.
Extension Stroke
l,ii
: p(pti) x ao(inz)
(6-1)
F,.,(N):p{Pu} xan(m')
(6-1M)
F",,(lb)
lir,lil
ili,,l
i:,
u-.(ft/s)
u€r,(m/s)
'
-""
: O,..(ftr/s)
=
A,(ft')
:
gr,(*'/s)
---:
^
A"(m-,1
16-2)
.
(6-2M)
Retraction Stroke
(6-3)
(6-31vI)
(6-4)
(6-4M)
The porver developed by a hydraulic c-vlincier equals the prodrrct of its force
and velocriy during a given stroke. Using this relationship and Eqs' (6-1) and (6-2) for
the extending stroke and Eqs. (6-3) ancl (6-4) for the retraction sit oke, we arrive ai the
same result: Porver = p x Qi,,.ahus. rve conclude that the porver developed equals the
product of pressure and cylinder input volume flow late for both the extension and
retraction strokes-
Hydraulic Cylinders and Cushioning Devices
The horsepower developed by a hydraulic cylinder for either the extension or
retraction stroke can be found using Eq. (6-5).
Porver
(HP)
F(ib):
550
ur(ftls) x
+9,,,(gpm)
x p(psi)
(6-s)
1-t14
Using metric unit5, the kW power developed for either the extension or retraction
stroke can be found using Eq. (6-5M).
Power
:
(tW; = uo(m/s) x r(kN)
p(kPa)
Q*(m'/s) x
(6-5M)
Note that the equating of the input hydraulic power and the output mechanical power
in Eqs. (6-5) and (6-5M) assumes a 100% efficient hydrauiic cylinder.
h, The piston velocity during the extending stroke
c. The cylinder horsepower during the extending stroke
d. The hydraulic pressure during the retraction stroke
: : e. 'Ttr€ pistgn velocity duriiig.the'retiffion stroke
f.
The cylinder horsepower during the retrrietion,stroke
,;solution
h.
'
F".,(lb) 1000 1000
= rl5PS1
I')"-: Ae(1n1 :
1-;p: Tl4
..,,.,,
u..
{"14
Q-(ltr1s) 20/449
3 .t 4i 144
A,, (l )
x4',(tu)
12
Hp
.:
HPu-t
d.
P,,,
-
'-.,(n/s)
550
C,,,(gpm) x p"-(psi)
-
0.02{8
2.05
x
:
1000
550
x
20
318
lv74
1114
F,"r(ib)
: ---'.---.--..:
(A, A.)inr
0.0446
1*01]
3.14
-
Qrl$Q\'
2.05 fr/s
= 3.lZhp
3J2hp
i000
2.355
:425osi
Chapter 6
208
iidff
6.5 GYLIIUDER LOADS I}UE TO MOUING OF WEIGHTS
The force a cylinder must produce equals the load the cylinder is required to overcome. In many cases the load is due to the weight of an object the cylinder is attempting to move. In the case of a vertical cylinder, the load simply equals the weight of
the object because gravity acts in a dorvnward, vertical directionSometimes a cylinder is used to slide an obiect along a horizontal surface. In this
case, the cylinder load is theoretically zero.This is because'thcre is no.conrponent of
the object's u,eight acting along the axis of the cylinder (a horizontal direction). However. as the object slides across the horizontal surface, the cylinder must overcome the
frictional force created between the object and the horizontal surface.This frictional
force. rvhich equals the load acting on the cylinder, opposes the direction of motion
of the moving object.
If the cylinder is mounled in nejther a vertical nor horizontal direction, the
cylinder load equals the component of the object's rveight acting along the axis of
the cylinder. plus a frictionai force if the object is sliding along an inclined surface.Thus
for an inclined cylinder- the load the cvlinder must oyercome is less than the weight
of the object to be moved if the object is not sliding on an inclined surface.
The cylinder loads described up to now are based on rnoving an object at a constant velocity. However. an object to be moved at a given velocity is initially at rest.Thns
the object has to be accelerated from zero velocity up to a steadl, state (constant)
velocitv as determined by the pump florv rate entering the cvlinder,This acceleration
Hydraulic Cylinders and Cushioning Devices
209
represents an additional force (called an inertial
force) that must be addeci to the
rveight component and any frictionai force involved.
Examples 6-2,6-3,and 6-4 illustrate how to determine loads acting on cylinders
that are moving objects in any given direction, taking into account sliding friction
and acceleration.
Examplr
'
6-3
Find the cylinder force F requiled to lift rhe 6000-lb weight lv of Example 6-2
*rg u. d.irection rvhich is 30" from the horizontal- as shlown in Figure e-s1o).
The weight is moved at constant velocity.
Solution
As shgwn in Figure 6-B(b).the cylinder lorce F,muqt equal the cd-moonent of
the weighr acting along the centerlile of thL. c-vlinder. Thus, rve have a right
triangle r.r"ith the.hypoi:ny:? !v and the sitle F iorming a 60'angle. Frim
tngonometry we have sin 30. = F/W. Soivin-e for Fyields
tr
:
triz
sin 30'
=
6000 1b X sin30.
=
"o\
3)
(a)
Figure
6-8. inclinrrl cr..lirder liftins a loard iol- Exrr:toi: i: l
3000 lb
Chapter 6
210
,:Exat1ryr,u 6-4
The 6000-1b weight of Exampie 6-2 is to be lifted uprvard in a vertical directo
cylinder force required
tion: .'.'r
Fin'dtiie
''l-::.'. ::
:
'
::il:
'_
r
'
ght at a constant velocity
city of 8 ftls
tt/s
a. Move the wei
b; Accelerate the weight from zero veiocity to a velocity of
Soluttioin
.
B
,
ft/s in 0.50
.,
s
)
a. For a constant velocity the cylinder lorce simply equals the weight of
6000lb.
,b,,rFrornNerwtori'S iaw of motion, the force required to accelerate a masb
-' , fin,EqSals,the product of the mass m and its acceleration a. Noting that
r,' .mass:equals ryeight divided by the acceleration of gravity g, we have ,
.,, . ,
..::.j.::-i.ra:!
a:
8fi/s-0ft/s :16ft|s"
0,50 s
Thus, the force required to accelerate the weight is
F."".,
6000 ib
: _:
x
32.2ftls:
16ft/s2
= 2980 lb
The cylinder force dr1 required equals the sum of the weight and the acceleration force.
4yr
:
6000
lb + 2980 lb
:
S9801b
6.6 SPEGIAL GYLIIUDER DESIGNS
Fjgule 6-9 iijustrates a double-rocl cylincler in r+,hjch the ror-1 extends oi-rt ol the cylindet at both ends. For such a cvlincler-. the rvolds (.\itrirl autl rr-'lirtcl havc tto tltcaning Since the folce anci speed are the sarre for eiiher encl. this type of cylintler is
Figure 6-9. Double-rod
cr'lrrder-. (Courtesv of Alle nuit
(oi 0.. ,\'lineolu. \itrr York.1
b,