Lectures on Waves and Oscillations
advertisement

Vibrations, waves and optics
Course notes for PH221
Ananda DasGupta
IISER-Kolkata
Spring Semester - 2011
Part I
Vibrations
0.1
Chapter 1
Oscillations in
conservative systems
1.1
The simple harmonic oscillator
The equation of motion of a simple haromonic oscillator (e.g. a box
attached to a spring fixed at one end, moving on a smooth horizontal
table top ) is
d2 x
m 2 = −kx
(1.1)
dt
q
k
, this becomes
Introducing the parameter ω0 ≡ m
d2 x
+ ω02 x = 0.
dt2
The particle will oscillate about x = 0, as we will see below.
If a constant force is supreposed on a SHO, we have
d2 x
F
m 2 = −kx + F = −k x −
.
dt
k
Substituting X = x −
F
k
(1.2)
we see that
d2 X
+ ω02 X = 0.
dt2
So the particle will oscillate about X = 0 i.e. x = Fk . Thus, all that a constant force does is to shift the equilibrium position. (Thus, letting the
box hang vertically from the same spring will not change the frequency
of oscillations - all that will happen is that the equilibrium position will
shift down, by a distance mg
k ).
Puzzle : If this is really correct, then what effect will a rough table top
(where the force of friction is a constant µmg ) have on the oscillations of
our spring?
1.0
CHAPTER 1. OSCILLATIONS IN CONSERVATIVE SYSTEMS
1.2
1.1
Solving the SHO equation
We want to solve the initial value problem
d2 x
+ ω02 x = 0,
dt2
1.2.1
subject to x (0) = x0 , and ẋ (0) = v0 .
(1.3)
First solution
Trying x = ept we see that the ODE is satisfied if
p2 + ω02 = 0
so that p = ±iω0 . This means that eiω0 t and e−iω0 t are two linearly
independent solutions of the linear homogeneous ODE (1.2). So, a
general solution to (1.2) is given by
x (t) = C1 eiω0 t + C2 e−iω0 t
where C1 and C2 are two arbitrary (in general complex) constants. Since
x (t) is real, we have
∗
[x (t)] = x (t)
which gives C2 = C1∗ . Writing C1 =
the general solution as
x (t) =
A iφ
2e ,
where A, φ ∈ R, we can write
A iφ iω0 t A −iφ −iω0 t
e e
+ e e
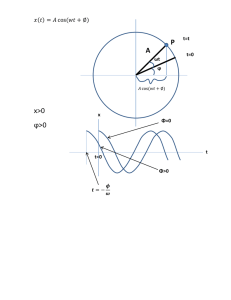
= A cos (ω0 t + φ)
2
2
(1.4)
The constant A which is the maximum value that x (t) attains is
also called the amplitude of the motion. The quantity ω0 t + φ on which
the motion depends is called the phase, and φ the initial phase (aka
epoch - a cute term that is slightly out of fashion nowadays). Equation
(1.4) shows that the particle moves between x = +A and x = −A - i.e.
it oscillates equally about x = 0. Since the cosine function is periodic
with a period of 2π , the motion repeats with a time period given by
T =
2π
.
ω0
(1.5)
This shows that the time period of a simple harmonic oscillator is actually independent of the amplitude of the motion (a quite amazing result
if you think about it!) - a property that is expressed by saying that the
simple harmonic motion is an isochronous system.
To solve the IVP, we note that (1.4) and its derivative
ẋ (t) = −ω0 A sin (ω0 t + φ)
(1.6)
CHAPTER 1. OSCILLATIONS IN CONSERVATIVE SYSTEMS
1.2
leads to
A cos φ
=
A sin φ
=
x0
v0
−
ω0
so that
x (t)
= A cos φ cos ω0 t − A sin φ sin ω0 t
v0
sin ω0 t
= x0 cos ω0 t +
ω0
(1.7)
Equations (1.4) and (1.6) shows that if we were to plot a v versus x
plot for a simple harmonic oscillator, we would get a curve which obeys
the equation
v2
x2
+ 2 2 = 1.
2
A
ω0 A
This is the well known equation for an ellipse. This, of course, is not
a surprise - it is just a rewriting of the law of conservation of energy
which would directly give
1
1
mv 2 + kx2 = E
2
2
where we have used that E = 12 kA2 = 12 mω02 A2 . The two axes of the
ellipse are A and ω0 A, respectively (note that x and v being of two different dimensions, comparing lengths along the two axes of this plot
is senseless - and so there is no way to decide which axis is the major
and which the minor one here). The precise ellipse traced out depends
on the value of A and is thus dependent on initial conditions. Note
however that information about the epoch is lost in these plots. Such
v versus x plots are called phase space plots - and they play a very
important role in advanced studies of dynamics. Actually phase space
plots are plots of the momentum p versus x - which in this case differs
from the v versus x plots by just a simple scaling by m, so that the axes
are now A and mω0 A. The area of the ellipse in phase space is given by
πmω0 A2 = 2πE. This may look like a mere curiosity at this point of time.
However, let me try to pique your interest by saying that Max Plank had
arrived at his famous E = n~ω0 formula precisely by demanding that
this area be quantized in integer multiples of a fundamental constant
h!
1.2.2
Second solution
We can rewrite (1.2) as
v
dv
+ ω02 x = 0
dx
CHAPTER 1. OSCILLATIONS IN CONSERVATIVE SYSTEMS
where v ≡
dx
dt .
1.3
This leads to vdv + ω02 xdx = 0 which readily leads to
v2
ω 2 x2
+ 0
= constant.
2
2
If the maximum value of x is A, then we must have v = 0 at x = A. This
leads to
v 2 = ω02 A2 − x2 .
This leads to
p
dx
= −ω0 A2 − x2
dt
(why the minus sign?) so that
−√
which integrates to
cos−1
1.2.3
dx
= ω0 dt
− x2
A2
x
= ω0 t + φ.
A
Third solution
Equation (1.2) gives us
ẍ (0) = −ω02 x0 .
Differentiating once and putting t = 0 gives
x(3) (0) = −ω02 v0 .
Repeating this procedure gives
x(2n) (0) = −ω02
n
and
x(2n+1) (0) = −ω02
x0
n
v0 .
Although these equations have been derived for n > 0, it is easy to
check that they work for n = 0 also. This gives us the Taylor series
solution
x (t)
=
∞
∞
∞
n
n
X
x(n) (0) n X (−1) ω02n x0 2n X (−1) ω02n v0 2n+1
t =
t +
t
n!
(2n)!
(2n + 1)!
n=0
n=0
n=0
∞
∞
n
2n
n
2n+1
X
(−1) (ω0 t)
v0 X (−1) (ω0 t)
+
(2n)!
ω0 n=0
(2n + 1)!
n=0
v0
= x0 cos ω0 t +
sin ω0 t.
ω0
= x0
CHAPTER 1. OSCILLATIONS IN CONSERVATIVE SYSTEMS
1.2.4
1.4
Fourth solution
Introducing the operator D ≡
d
dt ,
we can write (1.2) as
D2 + ω02 x = 0.
The operator D2 + ω02 can be factored as (D + iω0 ) (D − iω0 ) so that
(D + iω0 ) (D − iω0 ) x = 0.
Define y (t) ≡ (D − iω0 ) x (t) to get the 1st order equation
(D + iω0 ) y = 0
subject to the initial condition
y (0) = v0 − iω0 x0
which is solved easily to yield
y (t) = y (0) e−iω0 t .
Thus
(D − iω0 ) x = y (0) e−iω0 t
which means that
d
x (t) e−iω0 t = y (0) e−i2ω0 t .
dx
This equation is solved easily to yield
x (t) e
−iω0 t
Z
− x0 = y (0)
t
0
dt0 e−i2ω0 t = y (0)
0
1 − e−i2ω0 t
2iω0
so that
x (t)
1.2.5
eiω0 t − e−iω0 t
2iω0
v0
iω0 t
= x0 e
− i sin ω0 t +
sin ω0 t
ω0
v0
= x0 cos ω0 t +
sin ω0 t.
ω0
= x0 eiω0 t + (v0 − iω0 x0 )
The free particle limit
We have seen that the general solution of the SHO equation (1.2) is
given by (1.4) :
x (t) = A cos (ω0 t + φ) .
CHAPTER 1. OSCILLATIONS IN CONSERVATIVE SYSTEMS
1.5
The limit ω0 → 0 should lead to the general solution for a free particle.
A naive limit, however, yields
x (t) → A cos φ
- a constant! This is certainly a solution for the free particle - but hardly
the most general solution!
The situation becomes clearer if we start from the solution of the
initial value problem (1.7). Since
lim cos ω0 t = 1
ω0 →0
and
lim
ω0 →0
sin ω0 t
= t,
ω0
this yields
x (t) → x0 + v0 t
which is, of course, the expected limit!
Puzzle : can you figure out what went wrong (or, how to put things
right) when we used (1.4)?
1.3
Small oscillations and the SHO
The importance of the SHO equation lies in its all pervasiveness. The
reason being that all conservative systems in stable equilibrium tend
to oscillate when disturbed from this position, and this oscillation is
almost always approximately simple harmonic when the oscillations
are small. To see why, let us expand the potential energy function
about x0 , the latter being the position of stable equilibrium
V 00 (x0 )
V 000 (x0 )
2
3
(x − x0 ) +
(x − x0 ) + . . .
2!
3!
(1.8)
Since η = x − x0 is small, the smaller powers will dominate in this
expansion. Now, the smallest power that is relevant for dynamics is the
quadratic (the constant term is unimportant for dynamics, the linear
term vanishes because −V 0 (x0 ) is the force acting on the particle at x0
). Thus, for small oscillations we have
V (x) = V (x0 ) + V 0 (x0 ) (x − x0 ) +
V (x) ≈ V (x0 ) +
V 00 (x0 )
2
(x − x0 )
2!
Conservation of energy leads to
2
1
dx
V 00 (x0 )
2
m
+
(x − x0 ) = constant
2
dt
2!
Differentiation with respect to x leads to the equation
mv
dv
+ V 00 (x0 ) (x − x0 ) = 0
dx
CHAPTER 1. OSCILLATIONS IN CONSERVATIVE SYSTEMS
1.6
or
d2 X
+ V 00 (0) X = 0
dt2
where X = x − x0 is the displacement from x = x0 . This shows that, at
least to a this order of approximation, the particle is going to execute
simple harmonic oscillations about the point x = x0 . It is easy to see
that the time period of oscillation will be
r
V 00 (x0 )
2π
where
ω=
(1.9)
T ≈
ω
m
m
As an example, consider the good old simple pendulum. The potential energy of the pendulum is given by
θ2
V (θ) = −mgl cos θ ≈ −mgl 1 −
2
So apart from a dynamically unimportant constant, the potential energy is given by 21 mglθ2 . Thus, the pendulum behaves like a spring with
a spring constant mgl (this, of course, is just the value of V 00 (0) - we
had just used the series expansion of cos θ above to find it fast!). We
have to be slightly careful before we use (1.9) to find the time period,
though! The point is that here the “coordinate” is θ and not x - and
so the kinetic energy term in the conservation of energy is going to be
1
1
2
2 2
2 mv = 2 ml θ̇ . This means that in this case we have to replace the m
in (1.9) above by ml2 . Doing this, we quickly get
s
s
ml2
l
T ≈ 2π
= 2π
(1.10)
mgl
g
which is the familiar formula from high school. Note also that this
is an approximate result, which hinges on the replacement of cos θ by
1 − 21 θ2 (or, equivalently, replacing the derivative − sin θ by θ). Thus, the
equation is valid as long as θ stays small - and hence the reason why
you must keep the amplitude of swing small (just how small is small is
a different question - one we will explore later).
As another example, consider a particle having mass m and charge
q that is free to slide along the axis of a ring of radius R and charge
−Q. It is easy to see that if we try to move the charge q away from the
center of the ring along the axis the ring tries to pull it back - so the
equilibrium at the center is stable along the axis1 . The potential energy
1 The qualifier “along the axis” is essential here - note that any displacement from the
center along the plane of the ring will produce a force that pulls the charge farther away
- the equilibrium is unstable under such displacements. This is something you have
learned in your em course - it is impossible to have stable equilibrium in electrostatics!
In our problem, of course, we have taken care of this by ensuring that the charge is
confined to move along the axis by some other force.
CHAPTER 1. OSCILLATIONS IN CONSERVATIVE SYSTEMS
1.7
of the charge when it is at a distance x from the axis is given by
V (x) = −
1
qQ
√
.
4π0 R2 + x2
This shows that as expected V (x) is minimum at x = 0. We need to
calculate V 00 (0) to find the time period of small oscillations. We could
do this by differentiating twice, but as in the last example, a direct
expansion is easier :
qQ
V (x) = −
4π0 R
so that V 00 (0) =
qQ
4π0 R3 .
− 21
qQ
x2
1 x2
≈−
1+ 2
1−
R
4π0 R
2 R2
Thus, the time period of oscillation is given by
s
T ≈ 2π
4π0 R3
.
mqQ
As our final example, we will consider the case of two molecules,
each of mass m, bound together by the potential energy function
b
a
− 6
V (r) = V0
r12
r
- a form that is called the Lennard-Jones potential. Here r is the distance between the two molecules. This is a slightly complicated problem because a) this is a two mody problem, and b) because here we
have to work a bit before we figure out where the equilibrium position
is! The first problem is easily handled - elementary mechanics tells us
that the relative separation between two bodies interacting only within
themselves behaves as if the interaction force was acting on a single
particle of a reduced mass - which in this case is m/2. To settle the
second issue, we calculate
12a 6b
0
V (r) = V0 − 13 + 7
r
r
12 × 13 a 6 × 7 b
00
V (r) = V0
−
r14
r8
Solving V 0 (r0 ) = 0 gives the equilibrium separation r0 as
r
6 2a
r0 =
b
and this means that
V 00 (r0 ) =
V0
r014
156a − 42b ×
2a
b
=
72V0 a
r014
CHAPTER 1. OSCILLATIONS IN CONSERVATIVE SYSTEMS
1.8
This means that the time period of oscillations is
s
7
r
r
m/2
πr07
m
π
m 2a 6
T ≈ 2π
=
=
V 00 (r0 )
6
V0 a
6 V0 a b
Given the derivation above, it may seem surprising that we had to
include the qualifier “almost all” when we spoke about systems that
show approximate simple harmonic behaviour when disturbed from
stable equilibrium. Given the general nature of the proof it seems that
the result has to be true for all such systems! The exception occurs
when the second derivative vanishes at the stable equilibrium position
x0 (in this case, the first nonzero derivative of V at x0 must be at a
higher even order, and must be positive - given that V (x) is a smooth
function ). For example a particle in a potential like αx4 will have a
position of stable equilibrium at x = 0 if α > 0, and the particle will
oscillate about this position if disturbed. But this oscillation will not be
simple harmonic.
Another issue that we must address is - just how small is the “small”
in small oscillations? Of course, when we are stopping at the quadratic
term in the Taylor series approximation of the potential, the term you
are ignoring is of the order of V 000 (x0 ) x3 . So, for the approximation
to be a valid one, the term that you retain (which is of the order of
V 00 (x0 ) x2 ) must dominate this term, so that the amplitude of motion
must satisfy
V 00 (x0 )
.
A
V 000 (x0 )
The result above will work as long as the third derivative is non-zero. If
all derivatives beyon the second are zero up to (but not including) the
n-th one, then the bound above will be
A
1.4
V 00 (x0 )
V (n) (x0 )
1
n−2
.
Beyond the small amplitude approximation
Consider a potential V (x) with a minimum at x = x0 . Let a particle
be moving in this potential with a total energy of E. In this case, the
points a and b, characterised by V (a) = V (b) = E are the turning points
of the motion. Since the velocity
q when the particle is at x ∈ [a, b] and is
2
moving from a to b is given by m
(E − V (x)), the time period (which is
twice the time the particle takes to go from a to b ) is given by
Z b
√
dx
p
T = 2m
(1.11)
E − V (x)
a
CHAPTER 1. OSCILLATIONS IN CONSERVATIVE SYSTEMS
1.9
As a first example, let us verify that this does give us the correct
result for the case for which we know the answer - the simple harmonic
oscillator. If the amplitude of oscillation is A, then we have E = 21 kA2 =
1
2 2
2 mω0 A , so that
T
=
=
√
Z
A
2m
dx
q
1
2
2 k (A
−A
− x2 )
r Z A
dx
m
√
2
k −A A2 − x2
Substituting x/A = z reduces this to
r Z 1
m
dz
√
T =2
k −1 1 − z 2
a result which shows the property of isochronicity. The integral evaluates to π so that we easily recover our result in (1.5).
Let us next consider motion of a particle under a potential given by
n
V (x) = α |x|
Here, the time period of oscillation for an amplitude of A is given by
T
=
√
Z
A
dx
2m
p
−A
r
A
Z
dx
An − x n
r
Z
2m 1−n/2 1
dz
√
= 2
A
α
1 − zn
0
=
2
2m
α
n
α (An − |x| )
√
0
At this stage, we are in a position to say that T ∝ A1−n/2 , even without
carrying out the integral. This gives us back the fact that for n = 2,
T is independent of A. Indeed, what might come as a surprise is that
for n > 2, larger amplitudes lead to smaller time periods! It turns out
that the integral above can be worked out for arbitrary n - substituting
u = z n leads to
Z 1
Z
1 1 1−n
1
1 1
1 Γ n1 Γ 12
dz
− 12
n
√
=
u
(1 − u) du = B
,
=
n 0
n
n 2
n Γ n1 + 12
1 − zn
0
R1
b−1
where B (a, b) ≡ 0 ta−1 (1 − t)
dt is the beta function, and we have
used its well-known connection with the Euler gamma function :
B (a, b) =
Γ (a) Γ (b)
.
Γ (a + b)
CHAPTER 1. OSCILLATIONS IN CONSERVATIVE SYSTEMS
Using the fact that Γ
be
1
2
1.10
√
π, we see that the time period turns out to
r
2 2πmA2−n Γ n1
.
T =
n
α
Γ n1 + 12
=
As in all complicated calculations, it is a good idea to check the result
against a known case. In this case, n = 2 and α = 12 k gives
s
T =
r
2πm Γ 12
m
= 2π
k/2 Γ (1)
k
as expected.
Here we have used the well known values Γ (1) = 1 and
√
Γ 12 = π.
1.5
The 2-dimensional harmonic oscillator
So far we have been considering the motion of an oscillator in one dimension.
Chapter 2
The damped oscillator
All the oscillations we have seen so far, simple harmonic or not, are
eternal. Once started, they go on for ever! This, of course, is in stark
contrast to everyday experience - all oscillations we see around us die
out in time. The reason behind this contradiction is simple - we have
been considering conservative systems - while all real systems have
some form of dissipation or the other at work. We will now consider a
system in which a damping force is superposed on top of a spring like
system - the damped harmonic oscillator. The equation of motion is
now
d2 x
m 2 = −kx + Fd (x, v)
(2.1)
dt
where Fd is the damping force. Since a force which depends on the
position alone is conservative, we must have some form of dependence
on v. As long as Fd is dissipative , the motion will die out. Howver, the
precise nature of motion depends on the form of the force. We will take
a look at a particularly simple example.
2.1
Linear damping
The kind of damping force that we will consider is one which is proportional to the velocity
Fd = −Γv
(2.2)
where Γ is a positive constant (the minus sign is essential - it makes
the force oppose the motion). A reason often offered to justify this
choice is that viscous damping under some conditions does obey this
form (Stoke’s law). However, the real reason for this choice is that
this leads to a linear equation - one which is relatively easy to handle
mathematically. The equation then becomes
d2 x
dx
+ 2b
+ ω02 x = 0
2
dt
dt
2.0
(2.3)
CHAPTER 2. THE DAMPED OSCILLATOR
2.1
Γ
where we have chosen b = 2m
. As before, we also have the initial
conditions
x (0) = x0
and
ẋ (0) = v0 .
We will solve (2.3) using the fourth technique that we used to solve
the SHO equation in the last chapter. This equation can be written in
the form
(D − r1 ) (D − r2 ) x = 0
d
, and r1,2 are the roots of the equation r2 + 2br + ω02 = 0,
where D ≡ dt
which means that
q
r1,2 = −b ± b2 − ω02 .
Defining y (t) = (D − r2 ) x (t) we see that
(D − r1 ) y = 0,
y (0) = v0 − r2 x0
which is easily solved to yield
d
− r2 x (t) = y (0) er1 t = (v0 − r2 x0 ) er1 t .
y (t) ≡
dt
This can be easily rewritten in the form
d
xe−r2 t = (v0 − r2 x0 ) e(r1 −r2 )t
dt
which integrates to
x (t) e−r2 t − x0 = (v0 − r2 x0 )
Z
t
0
e(r1 −r2 )t dt0
0
and thus
x (t)
=
=
=
e(r1 −r2 )t − 1
e
x0 + (v0 − r2 x0 )
r1 − r2
r2
e r1 t − e r2 t
r1 t
r2 t
r2 t
e −e
+ v0
x0 e −
r1 − r2
r1 − r2
r2 t
r1 t
r1 t
r2 t
r1 e − r2 e
e −e
x0 +
v0
r1 − r2
r1 − r2
r2 t
(2.4)
Differentiation gives the velocity as
v (t) =
r1 r2
r1 er1 t − r2 er2 t
e r2 t − e r1 t x 0 +
v0
r1 − r2
r1 − r2
(2.5)
We now have a complete solution of the initial value problem. However,
the nature of the solution depends strongly on whether the roots r1,2
are real or complex, which depends on the relative sizes of b and ω0 .
CHAPTER 2. THE DAMPED OSCILLATOR
2.1.1
2.2
The underdamped case
Let us first consider the case b < ω0 . Since b = 0 gives us back the
simple harmonic oscillator, this is the natural extension of the motion
we studied in the last chapter. We define
q
ω = ω02 − b2
so that the roots are r1,2 = −b ± iω. This means that (2.4) reduces to
x (t)
e−bt (−b + iω) e−iωt − (−b − iω) eiωt x0 + eiωt − e−iωt v0
2iω eiωt − e−iωt
eiωt + e−iωt
eiωt − e−iωt
−bt
= e
b
+
v0
x0 +
2iω
2
2iω
v0
b
sin (ωt) e−bt
(2.6)
= x0 cos (ωt) + sin (ωt) e−bt +
ω
ω
=
We can find the velocity by differentiating (2.6), or perhaps somewhat
more simply from (2.5) :
v (t)
=
=
=
ω 2 + b2 −bt −iωt
e−bt e
e
− eiωt x0 +
(−b + iω) eiωt − (−b − iω) e−iωt v0
2iω
2iω eiωt + e−iωt
b eiωt − e−iωt
ω 2 eiωt − e−iωt
e−bt
−
x0
v0 − 0
2
ω
2i
ω
2i
2
ω x0
b
v0 cos (ωt) − sin (ωt) e−bt − 0 sin (ωt) e−bt
(2.7)
ω
ω
Note that for some purposes the form
x (t) = Ae−bt cos (ωt + φ)
of the solution is quite useful. The two constants A and φ are related
to the intial conditions by
x0
= A cos φ
v0
= −ωA sin φ − bA cos φ
or
s
A
tan φ
v0 + bx0
ω
=
x20
= −
v0 + bx0
ωx0
+
2
CHAPTER 2. THE DAMPED OSCILLATOR
2.1.2
2.3
The overdamped case
The case b > ω0 is called, naturally, overdamped.
In this case both
p
r1 and r2 are real (and negative). We denote b2 − ω02 by b0 . We could
repeat the whole calculation all over again. Replacing all the ω s in (2.6)
and (2.7) by −ib0 works just as well. Using the identities
cos (iz) =
and
ei(iz) + e−i(iz)
= cosh z
2
sin (iz)
ei(iz) − e−i(iz)
sinh z
=
=
iz
2i (iz)
z
we can easily see that we have
v0
b
x (t) = x0 cosh (b0 t) + 0 sinh (b0 t) e−bt + 0 sinh (b0 t) e−bt
b
b
(2.8)
and
ω 2 x0
b
v (t) = v0 cosh (b0 t) − 0 sinh (b0 t) e−bt − 0 0 sinh (b0 t) e−bt .
b
b
2.1.3
(2.9)
The critically damped case
The borderline bewteen the underdamped and overdamped cases occur
when b = ω0 . The solution to the IVP can be easily found in this case
by taking the ω → 0 limit of (2.6) and (2.7) :
x (t)
v (t)
= x0 (1 + bt) e−bt + v0 te−bt
= v0 (1 − bt) e
−bt
−
x0 ω02 te−bt
(2.10)
(2.11)
Chapter 3
The forced harmonic
oscillator
Consider the case where a harmonic oscillator is acted upon by an
additional force (in addition to the damping force, which is assumed to
be present) Fd (t) (the suffix d here stands for driving). The differential
equation obeyed by the particle is then
dx
d2 x
+Γ
+ kx = Fd (t)
dt2
dt
which can be rewritten as
d2 x
dx
+ ω02 x = f (t)
+ 2b
dt2
dt
m
where f (t) =
Fd (t)
m .
This can be written in the form
(D − r1 ) (D − r2 ) x = f (t)
where r1,2 = −b ± iω as before. Again using the abbreviation (D − r2 ) x =
y, we have, as before
(D − r1 ) y = f (t)
which satisfies
y (t) e−r1 t − y (0) =
t
Z
0
f (t0 ) e−r1 t dt0
0
so that
y (t) = y (0) e
r1 t
Z
t
+
0
f (t0 ) er1 (t−t ) dt0
0
This means that
Z t
0
d
xe−r2 t
= e−r2 t y (0) er1 t +
f (t0 ) er1 (t−t ) dt0
dt
0
Z t
0
= y (0) e(r1 −r2 )t +
f (t0 ) e(r1 −r2 )t e−r1 t dt0 ≡ y (0) e(r1 −r2 )t + g (t)
0
3.0
CHAPTER 3. THE FORCED HARMONIC OSCILLATOR
3.1
where we have used g (t) to abbreviate the integral on the right. Once
again, this is easy to integrate :
Z t
e(r1 −r2 )t − 1
g (t00 ) dt00
x (t) e−r2 t − x0 = y (0)
+
r1 − r2
0
Which leads to
r2 t
r1 t
Z t
Z t00
00
0
r1 e − r2 er1 t
e − er2 t
00 r2 t
+v0
+
dt e
dt0 f (t0 ) e(r1 −r2 )t e−r1 t
x (t) = x0
r1 − r2
r1 − r2
0
{z
}
|0
xd (t)
Note that the first two terms are exactly the same as the result (2.4) for
the damped oscillator. This, of course, makes perfect sense - because,
if f (t) is zero, our present problem reduces to just that! The third term,
which we have denoted by xd (t) above, is the result of the driving force.
Let us focus on this term now :
Z t
Z t00
00
0
xd (t) =
dt00 er2 t
dt0 f (t0 ) e(r1 −r2 )t e−r1 t
0
0
Z t
Z t
0
00
=
dt0 f (t0 ) er2 t e−r1 t
dt00 e(r1 −r2 )t
0
Z
t
0
Z
− e(r1 −r2 )t
r1 − r2
−r2 (t−t0 )
r1 (t−t0 )
−e
e
dt0 f (t0 ) er2 t e−r1 t
=
t
dt0 f (t0 )
=
0
Z
=
t0
(r1 −r2 )t
0
e
0
r1 − r2
t
dt0 f (t0 ) G (t − t0 )
0
where we have denoted by G (t) the function
G (t) ≡
e r1 t − e r2 t
r1 − r2
(3.1)
This is called the Green’s function for this particular problem. The concept of the Green’s function is a very important one - and we will meet
this many times in the days to come. The only nontrivial step above is
in the second line, where we have changed the order of integration. For
the important case of the underdamped harmonic oscillator (b < ω0 ),
the Green’s function takes the form
sin ωt
G (t) = e−bt
(3.2)
ω
Taking all this into account, the displacement for an underdamped
forced oscillator becomes
Z t
0
0 sin [ω (t − t )]
b
sin ωt −bt
x (t) = x0 cos ωt + sin ωt e−bt +v0
e +
dt0 f (t0 ) e−b(t−t )
ω
ω
ω
0
(3.3)
CHAPTER 3. THE FORCED HARMONIC OSCILLATOR
3.2
Let me point out that for practical calculations the form (3.1) is often
to be preferred over (3.2), it being easier to calculate the integrals of
exponentials.
3.1
Applications
3.1.1
A constant force
Let us now consider a very simple case - that of a constant force F0
superposed on a damped harmonic oscillator. In this case, we already
know the answer - all that the constant force does is to shift the equilibrium by F0 /k. Let us verify this by using (3.3).
0
0
r1 t
Z
F0 t 0 er1 (t−t ) − er2 (t−t )
e − e r2 t
r1 er2 t − r2 er1 t
+ v0
+
dt
x0
r1 − r2
r1 − r2
m 0
r1 − r2
r1 t
r2 t
r1 t
r2 t
r1 t
F0
e − 1 e r2 t − 1
e −e
r1 e − r2 e
+ v0
+
−
x0
r1 − r2
r1 − r2
m (r1 − r2 )
r1
r2
r2 t
r1 t
r1 t
r2 t
r2 t
r1 t
r1 e − r2 e
e −e
F0
r1 e − r2 e
x0
+ v0
+
1−
r1 − r2
r1 − r2
mr1 r2
r1 − r2
r2 t
r1 t
r1 t
r2 t
F0
r1 e − r2 e
F0
e −e
x0 −
+ v0
+
mr1 r2
r1 − r2
r1 − r2
mr1 r2
F0
v0
F0
b
+ x0 −
sin ωt e−bt
cos ωt + sin ωt e−bt +
k
k
ω
ω
x (t)
=
=
=
=
=
which shows that x − Fk0 behaves the same as x for a damped oscillator.
3.1.2
Sinusoidal driving force and resonance
We next turn to the case that is the most important one. This is the
case where the driving force is a sinusoid of frequency ωd :
Fd (t) = F0 cos (ωd t + φ)
So, the equation that we must solve is
m
d2 x
dx
+ kx = F0 cos (ωd t + φ)
+Γ
dt2
dt
(3.4)
subject to x (0) = x0 , v (0) = v0 . Instead, the equation we will solve is
m
d2 x̃
dx̃
+Γ
+ kx̃ = F̃0 eiωd t
dt2
dt
(3.5)
subject to x̃ (0) = x̃0 , ṽ (0) = ṽ0 . It is easy to see that if x̃ satisfies
(3.5), then its real part x (t) = < [x̃ (t)] satisfies (3.4), provided we take
CHAPTER 3. THE FORCED HARMONIC OSCILLATOR
3.3
F̃0 = F0 eiφ . We will get the initial values right, too - provided we take
x0 = < [x̃0 ] and v0 = < [ṽ0 ]. Using (3.3) it is easy to see that
x̃ (t)
0
r1 (t−t0 )
0 e
− er2 (t−t )
dt0 eiωd t
r1 − r2
0
iωd t
F̃0
e
− e r1 t
eiωd t − er2 t
+
−
m (r1 − r2 )
iωd − r1
iωd − r2
= x̃0
r1 er2 t − r2 er1 t
e r1 t − e r2 t
F̃0
+ ṽ0
+
r1 − r2
r1 − r2
m
= x̃0
r1 er2 t − r2 er1 t
e r1 t − e r2 t
+ ṽ0
r1 − r2
r1 − r2
Z
t
This shows why we preferred to work with complex functions - it is
after all, a lot easier to integrate exponentials rather than products of
sinusoids and exponentials. Note that we can split the driven term
x̃d (t) into two terms :
tr
= x̃ss
d (t) + x̃d (t)
1
1
F̃0 eiωd t
x̃ss
−
(t)
=
d
m (r1 − r2 ) iωd − r1
iωd − r2
r1 t
e
F̃0
e r2 t
tr
x̃d (t) = −
−
m (r1 − r2 ) iωd − r1
iωd − r2
x̃d (t)
Since both r1 and r2 have negative real parts, the x̃tr
d (t) dies out with
time (this is thus the transient part of the driven displacement), leaving
behind the steady state displacement
x̃ss (t) = x̃ss
d (t) =
F̃0 eiωd t
m (iωd − r1 ) (iωd − r2 )
Since r1 and r2 are roots of the quadratic r2 + 2br + ω02 = 0, we have
(r − r1 ) (r − r2 ) = r2 + 2br + ω02 , so that the (iωd − r1 ) (iωd − r2 ) in the
denominator is ω02 − ωd2 + i2bωd . Thus
x̃ss (t) =
m [ω02
F̃0 eiωd t
=
− ωd2 + i2bωd ]
F ei(ωd t+φ+δ)
q 0
2
m (ω02 − ωd2 ) + 4b2 ωd2
(3.6)
where δ = Arg ω02 − ωd2 − i2bωd . The steady state motion for a sinusoidal driving force F0 cos (ωd t + φ) is then
xss (t) = < [x̃ss (t)] =
F0
q
cos (ωd t + φ + δ)
2
m (ω02 − ωd2 ) + 4b2 ωd2
(3.7)
Thus there is a phase difference of δ between the driving force and the
resulting displacement. Since δ is in the third or the fourth quadrant,
the displacement always lags behind the force.
Differentiating (3.6) we get
ṽ ss (t) =
iωd F̃0 eiωd t
F̃0 eiωd t
h
=
2
− ωd + i2bωd ]
2bm 1 − i ω2b0 ωωd0 −
m [ω02
ωd
ω0
i
CHAPTER 3. THE FORCED HARMONIC OSCILLATOR
3.4
The steady state velocity is, of course, the corresponding real part :
v ss (t) = r
1 + Q2
v0
ω0
ωd
−
ωd
ω0
0
2 cos (ωd t + φ + δ )
ω0
F0
0
where
used
h we have
i the abbreviations v0 = 2bm , Q = 2b and δ =
Arg 1 + i ω2b0 ωωd0 − ωωd0 . What is the connection between δ 0 and the phase
δ?
Thus the peak steady state speed is given by
vp = r
1 + Q2
v0
ω0
ωd
−
ωd
ω0
2
(3.8)
This expression shows that the maximum value the peak steady state
speed can take is v0 and this speed is attained when the denominator
is a minimum - i.e. when ωd = ω0 . This is the phenomenon of resonance (velocity resonance to be precise) and it occurs when the driving
frequency matches the natural frequency of the system. What happens
to this peak speed when the system is off-resonance, i.e. when ωd 6= ω0 ?
The peak speed now is of course less than v0 - but just how fast it drops
off as ωd moves away from ω0 depends on the size of Q. If Q is large, the
peak speed drops off rapidly as the driving frequency moves away from
the natural frequency in either direction - and we have what is called
a sharp resonance. On the other hand, if Q is small then the driving
frequency can go quite far away from the natural frequency without
before the peak speed drops appreciably and we have a flat resonance.
v
This can be seen from figure () which plots the values of vp0 against ωωd0
for a few different values of Q.
Note that the resonance curves are not really symmetric about ω0 .
This is easy to see, from the fact that the function
1
q
1 + Q2 x −
1 2
x
(here he have abbreviated the ratio ωωd0 by x ) vanishes at x = 0 and
x = ∞ - which is anything but symmetric about x = 1. It is easy to see
that the function takes the same value when x = ξ, say, as when x = 1ξ .
So there is a symmetry, but this is a symmetry in terms of ratios and
not in terms of differences. This means that if the resonance curve is
plotted using a logarithmic scale, we will get a symmetric curve. On the
other hand, if Q is large, the curve drops off rapidly away when x moves
away from unity and the important region is x ≈ 1. Now, we have seen
that the value of the function at x = 1 + δ is the same as its value when
1
x = 1+δ
- but when δ 1, which is all we need to worry about when Q
CHAPTER 3. THE FORCED HARMONIC OSCILLATOR
Figure 3.1: Resonance curves showing
Q
vp
v0
vs.
ωd
ω0
3.5
for different values of
1
is large, we have 1+δ
≈ 1 − δ. Thus, the sharp resonance curves that we
get for large values of Q are (nearly) symmetrical about ωd = ω0 .
To get a qualitative measure of the sharpness of a resonance curve,
we begin by defining the upper and lower cutoff frequencies (also known
as the upper and lower 3 dB frequencies). These are the frequencies (on
the upper and lower side of the natural √
frequency) at which the peak
steady state speed drops by a factor of 2 from the maximum value
attained at resonance. If you are wondering why such a complicated
factor - just remember that the power is proportional to the square of
the velocity - which is why they are also called half power frequencies.
In fact a drop by a factor of 2 in the power, means that the power measured in Bels drops by 0.3 (the Bel is a logarithmic unit and we have
log 2 ≈ 0.3 - remember that these are logarithms to the base 10!) - so
that the power decreases by 0.3 Bels, and thus by 3 decibels - justifying
the second nomenclature above for these frequencies.
From (3.8) these driving frequencies must satisfy
2
ω0
ωd
2
Q
−
=1
ωd
ω0
so that
ω0
ωd
1
−
=±
ωd
ω0
Q
CHAPTER 3. THE FORCED HARMONIC OSCILLATOR
and thus
ωd2 ±
3.6
ω0
ωd − ω02 = 0.
Q
It is easy to see that each of the two quadratic equations thus obtained
for ωd (one for each sign) has exactly one positive root. Solving for the
positive root in each case gives us the two 3 dB frequencies as
r
1
ω0
±
ω± 12 = ω0 1 −
.
2
4Q
2Q
The bandwidth is defined to be the difference between these two frequencies :
ω0
.
BW ≡ ω+ 21 − ω− 12 =
Q
The bigger the bandwidth, then, the flatter the resonance. Thus to
get a measure of the sharpness we should use the reciprocal of the
bandwidth, but this has to be scaled by the natural frequency of the
system ( a bandwidth of 500 s−1 may be very large when the resonance
occurs at, say, 2000 s−1 , but may not really amount to much if the
resonance frequency is, say 2 × 106 s−1 ). Thus we define
Quality factor ≡
ω0
.
BW
It is easy to see that according to this definition the quality factor turns
out to be our old friend Q - which is, of course, why we denoted it by
the letter Q in the first place.
Chapter 4
Coupled oscillations
4.0
Part II
Waves
4.1
Chapter 5
Waves in 1 dimension
5.1
Non-dispersive waves in 1 dimension
Consider a function f (x) - one whose graph is shown in figure (5.1).
What will be the function which has the same graph - but shifted to
the right by a distance a? Since the new function, say f (x), has to
have the same value at x + a as the original one at x, it must satisfy
f (x + a) = f (x), or, f (x) = f (x − a).
Now, let us consider a wave travelling to the right at a speed c
without spreading or changing shape. Such a wave is called a nondispersive wave. If such a wave is described by the function f (x) at
t = 0, at a time t, it will be shifted by a distance ct to the right, and will
hence be described by the function f (x − ct). Again, if a wave travelling
to the left is described by the function g (x) at t = 0, its description at a
later time tis furnished by g (x + ct).
A general wave could be travelling either to the left, or to the right,
or both! So the general function describing a non-dispersive wave in
one dimension is
y (x, t) = f (x − ct) + g (x + ct)
(5.1)
Note that at this point the functions f and g are arbitrary - but as we
f¯(x)
f (x)
x
a
x
Figure 5.1: Shifting a function
5.0
CHAPTER 5. WAVES IN 1 DIMENSION
5.1
will soon see, they can be determined from the initial and boundary
conditions that we impose on the wave.
5.2
The wave equation in 1-D
What we have in (5.1) is a solution to the problem of propagating waves
in 1 dimension. What we now seek is an equation that will have (5.1) as
its solution. In the best traditions of mathematical physics we will look
for a differential equation that is satisfied by y (x, t). Of course, since y
is a function of two variables, this must be a partial differential equation. In addition, since many (indeed, an infinite number ) of equations
will have (5.1) as their solution, we will try to keep this equation as
simple as possible. Also, in keeping with the dictat of simplicity, since
the solution is a sum of two terms, the most obvious choice would be a
linear equation.
Let us start by forming the partial derivatives of the solution :
∂y
(x, t)
∂x
∂f
∂g
(x − ct) +
(x + ct)
∂x
∂x
= f 0 (x − ct) + g 0 (x + ct)
=
where we have used the chain rule of differentiation and used the fact
∂
∂
(x − ct) = ∂x
(x + ct) = 1. Similarly
that ∂x
∂y
(x, t) = −cf 0 (x − ct) + cg 0 (x + ct)
∂t
∂
∂
where we have used ∂t
(x − ct) = − ∂t
(x + ct) = c.
Note that the primes denote differentiation with respect to the respective single arguments of the functions f and g. Since both f and g
are functions of a single variable each - these are ordinary (not partial)
derivatives1 .
But for the change in sign, we have almost reached the equation
∂y
that we wanted. However, while ∂x
is f 0 + g 0 , the other derivative is
0
0
−c (f − g ). To get the signs to match, we must push on to the second
1 In case you have forgotten how the chain rule goes, let me show you how you could
derive the above from first principles. For example, considering the function y1 (x, t) =
f (x − ct) we have
∂y1
y1 (x, t + k) − y1 (x, t)
f (x − c (t + k)) − f (x − ct)
(x, t) ≡ lim
= lim
k→0
k→0
∂t
k
k
= lim
k→0
f (x − ct − ck) − f (x − ct)
f (x − ct + (−ck)) − f (x − ct)
= −c lim
−ck→0
k
(−ck)
which is nothing but −cf 0 (x − ct) from the definition of the derivative!
CHAPTER 5. WAVES IN 1 DIMENSION
5.2
order :
∂2y
(x, t)
∂x2
∂2y
(x, t)
∂t2
= f 00 (x − ct) + g 00 (x + ct)
= c2 (f 00 (x − ct) + g 00 (x + ct))
so that we can eliminate the arbitrary function f and g and write
1 ∂2y
∂2y
− 2 2 =0
2
∂x
c ∂t
(5.2)
This is the famous wave equation in 1 dimension.
You may wonder why we are bothering to find out the equation - since we already have the solution! After all, isn’t the
aim really to find out solutions to the equations? Let me give
you a few reasons why going the opposite route (as we have
done here) is often a good idea
1. There are other ways of writing the solution (as we will
see) which may help shed light on various aspects that the
solution (5.1) may not reveal directly.
2. It is easy to generalize the equation. For example, the
wave equation in 3-D is obtained by replacing the derivative
∂2
∂x2 by, obviously, the Laplacian!
3. There are many physical situations where the basic equations of physics (e.g. those of mechanics or electromagnetism)
lead directly to the wave equation (5.2), or its three dimensional counterpart.
5.3
The general solution of 1-D wave equation
So far we hjave constructed the 1-D wave equation (5.2) strating from
the solution (5.1). So, even without doing anything else we are sure
that (5.1) will satisfy (5.2). However, the question that remains is :
are there other solutions to (5.2) which are not of the form (5.1)? The
answer is in the negative - (5.1) not only furnishes a solution of (5.2), it
actually furnishes the most general solution!
To see this, let us begin u = x−ct and v = x+ct. To be mathematically
rigorous ( a trend that we may not continue for long in this course) we
will also define Y (u, v) = y (x, t). Now
∂Y ∂u ∂Y ∂v
∂Y
∂Y
∂y
=
+
=
+
∂x
∂u ∂x
∂v ∂x
∂u
∂v
CHAPTER 5. WAVES IN 1 DIMENSION
5.3
Going ahead, we have
∂2y
∂x2
∂
∂Y
∂
∂Y
=
+
∂x ∂u
∂x ∂v
∂u ∂
∂Y
∂v ∂
∂Y
=
+
∂x ∂u ∂u
∂x ∂v ∂u
∂u ∂
∂Y
∂v ∂
∂Y
+
+
∂x ∂u ∂v
∂x ∂v ∂v
2
2
2
∂ Y
∂ Y
∂ Y
+2
=
+
∂u2
∂u∂v
∂v 2
A similar calculation gives
1 ∂2y
∂2Y
∂2Y
∂2Y
=
−2
+
2
2
2
c ∂t
∂u
∂u∂v
∂v 2
so that in terms of the variables u and v the wave equation becomes
4
∂2Y
=0
∂u∂v
(5.3)
Equation (5.3) is of a particularly simple form and thus can be
solved rather easily. To begin with, it says that the function ∂Y
∂v of u
and v vanishes when you differentiate it partially with respect to u - so
it must be a function of v alone :
∂Y
= G (v)
∂v
Integrating this once again gives
Z v
Y (u, v) =
G (v 0 ) dv 0 + f (u) .
Note that the “constant of integration” here is anything that vanishes
when you differentiate partially with respectR to v - so that it can be an
v
arbitrary function2 of u, f (u). Abbreviating
G (v 0 ) dv 0 by g (v) we get
Y (u, v) = f (u) + g (v)
so that the most general solution of the wave equation is
y (x, t) = f (x − ct) + g (x + ct)
where f and g are arbitrary (sufficiently smooth) functions - which is
what we started out with. This is called the d’Alembert solution, in
honor of the French mathematician, physicist, philospher Jean le Rond
d’Alembert.
2 Of course, this function can not be completely arbitrary - it must be sufficently
smooth for the differentiations to make sense.
CHAPTER 5. WAVES IN 1 DIMENSION
5.4
5.4
The wave equation in a strretched string
So far, we have seen that waves that travel either to the left or to the
right in 1 dimension without changing their shape or size has to obey
the wave equation (5.2). This has been arrived at from a purely mathematical point of view - and still leaves the question of the physical
relevance (or otherwise) of this equation open. In this section we will
see that there is at least one system (and we will find more of these in
the days to come) for which the wave equation is a very good approximation.
Consider a (initially) horizontal string having a mass m per unit
length that is stretched by an uniform tension T undergoing small vertical oscillations. The tension in the string is strong enough for us to
ignore all other forces, notably that of gravity. Let us consider an infinitesimally small segment of the string, between x and x + dx. The
mass of this segment is mdx. The net external force on this segment
is provided by the tensions exerted by the portions of the string to the
right and to the left of the segment, respectively. The net external force
in the vertical direction is, then,
dy
∂2y
dy
−T
= T 2 dx
T
dx x+dx
dx x
∂x
Using this in Newton’s second law yields
mdx
∂2y
∂2y
=
T
dx
∂t2
∂x2
or
∂2y
m ∂2y
=
∂x2
T ∂t2
which is of the form (5.2). This also shows that the speed of waves
travelling in a stretched string is given by
r
T
c=
.
(5.4)
m
5.5
Solving the initial value problem
So far we have established that the wave equation
∂2y
1 ∂2y
− 2 2 =0
2
∂x
c ∂t
has the general solution
y (x, t) = f (x − ct) + g (x + ct)
CHAPTER 5. WAVES IN 1 DIMENSION
5.5
where f and g are, as yet, unknown functions. Initial and boundary
conditions will allow us to choose this functions and hence solve for
the wave.
Let the initial conditions specified be
y (x, 0) =
∂y
(x, 0) =
∂t
y0 (x)
(5.5)
v0 (x)
(5.6)
Substituting these in (??) leads to the equations
f (x) + g (x)
= y0 (x)
v0 (x)
f 0 (x) − g 0 (x) = −
c
(5.7)
(5.8)
where the primes on f and g denote differentiation with respect to their
respective arguments. Integrating (5.8) leads to
Z
1 x
f (x) − g (x) = −
v0 (x0 ) dx0
(5.9)
c ξ
where ξ is an arbitrarily chosen fixed coordinate. These easily lead to
Z x
1
1
1
y0 (x) −
v0 (x0 ) dx0 = (y0 (x) − V0 (x)) (5.10)
f (x) =
2
2c ξ
2
Z x
1
1
1
y0 (x) +
g (x) =
v0 (x0 ) dx0 = (y0 (x) + V0 (x)) (5.11)
2
2c ξ
2
where we have used the abbreviation
Z
1 x
V0 (x) =
v0 (x0 ) dx0 .
c ξ
Equations (5.10) and (5.11) show that the functions f (x) and g (x) are
known only up to an additive constant (because of the arbitrary choice
for ξ) but this arbitrariness goes away when we consider the full solution
Z x+ct
1
1
y (x, t) = (y0 (x − ct) + y0 (x + ct)) +
v0 (x0 ) dx0
(5.12)
2
2c x−ct
Equation (5.12) is the complete solution to the initial value problem for
waves in one dimension. Below we consider the actual solution for a
couple of specific initial conditions.
CHAPTER 5. WAVES IN 1 DIMENSION
5.6
(a)
(b)
(c)
(d)
(e)
(f)
Figure 5.2: Wave propagation in an infinitely long plucked string. Figure (a) shows the initial configuration of the string, as well as the functions f (x) and g (x), while (b) - (f) shows various stages of the propagation of the wave. In each of these the red and blue lines depict f (x − ct)
and g (x + ct), respectively. As you can see, these shift respectively to
the left and the right as time progresses. The vertical dashed lines are
meant to be a guide to the eye. For example, in (a), for the region to the
left of the first such line, both f (x − ct) and g (x + ct) vanish - leading
to y (x, t) = 0. Between, the first and the second line, only g (x + ct) is
nonzero - leading to it being the same as y (x, t) here. Both f (x − ct)
and g (x + ct) are nonzero and increasing between the second and the
third vertical lines - leading to y increasing twice as fast here. Between
the thisrd and the fourth lines, g (x + ct) is falling while f (x − ct) is still
rising - and the symmetry of the functions in this example ensures that
the string is flat here.
CHAPTER 5. WAVES IN 1 DIMENSION
5.5.1
5.7
A plucked infinite string
Let us consider an infinite string that is given the initial shape shown
in figure (5.2a) and released from rest. Thus, the initial conditions are
v0 (x)
y0 (x)
=
=
0
0
h 1 + x a
x
h
1
−
a
0
for
for
for
for
x < −a
−a≤x<0
0≤x<a
x≥a
Equation (5.9) immediately leads to
f (x) = g (x)
so that (5.7) yields
f (x) = g (x) =
1
y0 (x)
2
Thus, the wave at time t is given by
y (x, t) =
y0 (x − ct) + y0 (x + ct)
2
This result has a very simple interpretation - the final wave consists of
two pieces, each half as high as the initial disturbance, one travelling
to the left and the other to the right. When the two pieces are well
separated, you can see them exactly as they are - two distinct pulses.
For a short while after t = 0, however, the two pulses overlap and the
resulting disturbance looks slightly more complicated.
5.5.2
A struck infinite string
Let us now consider the other extreme - a horizontal string that is dealt
a sudden impulsive blow. Immediately after the blow is struck we have
y (x, 0) ≡ y0 (x) = 0
so that in this case (5.12) leads to
Z x+ct
1
y (x, t) =
v0 (x0 ) dx0
2c x−ct
which gives us a complete solution of the problem.
On the other hand, it is quite instructive to look at this problem
from the point of view of the right and left going pulses. From (5.7) we
get that in this case
f (x) + g (x) = 0
CHAPTER 5. WAVES IN 1 DIMENSION
5.8
v0
a
c v0
−a
+a
(a)
(b)
(c)
(d)
(e)
(f)
Figure 5.3: Waves in a struck infinite string.
CHAPTER 5. WAVES IN 1 DIMENSION
5.9
Coupled with (5.9) this yields
1
f (x) = −g (x) = −
2c
Z
x
v0 (x0 ) dx0
ξ
For the sake of definiteness, we will discuss the (somewhat artificial)
situation where the initial velocity is a constant v0 in a small interval of
the string and zero everywhere else :
(
v0 for |x| ≤ a
v0 (x) =
0 for |x| > a
This gives us
g (x) = −f (x) =
0
for x < −a
for − a ≤ x ≤ a
for x > a
x+a
2c v0
a
c v0
Initially the right going and left going pulses cancel each other out.
But as they start separating from each other, their sum y (x, t) forms a
trapezium that grows in both height and width. This continues as long
as the inclined parts of the two pulses oevrlap - after sufficient time,
the pulses separate far enough to ensure that this is no longer the case.
From this point on, the trapezium keeps on growing in width - but the
height stays fixed at ac v0 . With a little thought you should be able to see
that the width of the trapezium at the base is given by 2 (a + ct), while
the height is given by v0 t for t ≤ ac . You can see all this graphically in
figure (5.3).
5.6
Boundary conditions
So far, we have not worried about boundary conditions - since the
strings we had dealt with were infinite anyway, there were no boundaries to worry about! However, once we move away from simple infinite
wires, we will have to worry about the boundaries of our system. We
will coonsider several different kinds of these conditions - which arise
in different physical conditions.
5.6.1
A semi-infinite string - fixed at one end
Let us consider a string that is stretched from x = 0 to x = ∞. Let the
end at x = 0 be fixed. This means that
y (0, t) = 0
∀t ≥ 0.
(5.13)
CHAPTER 5. WAVES IN 1 DIMENSION
5.10
g(−x)
g(x)
−g(−x)
Figure 5.4: Graphical interpretation of −g (−x).
As in the last section, we have the initial conditions
y (x, 0)
∂y
(x, 0)
∂t
=
y0 (x)
=
v0 (x)
but unlike the last section, where these were valid for all x, here they
are valid for x ≥ 0 only! As in the last section, we get
Z x
1
1
y0 (x) −
v0 (x0 ) dx0
f (x) =
2
2c ξ
Z x
1
1
g (x) =
y0 (x) +
v0 (x0 ) dx0
2
2c ξ
but, once, again, these will work only for nonnegative values of x (in
fact we must take the arbitrary constant ξ to be nonnegative as well in fact, it may be useful to take ξ = 0).
So it seems that we have all that we need to find the solution y (x, t)
using f (x − ct) + g (x + ct) - remember that we need this for x ≥ 0, anyway! There is no problem with the g (x + ct) part - the argument is
positive for all x ≥ 0 and t ≥ 0. However, the argument of f (x − ct) can
be negative for sufficiently large t even if x is positive - so we need to
know the function f (x) for negative x as well. This information can be
found by appealing to (5.13) - which leads to
f (−ct) + g (ct) = 0
∀t ≥ 0.
Thus, for x ≤ 0 we have
f (x) = −g (−x) .
Note that −x is non-negative in this case - so that we do know g (−x)
from the initial conditions. Note that we can get the graph of g (−x)
CHAPTER 5. WAVES IN 1 DIMENSION
5.11
by reflecting that of g (x) about the Y -axis. Reflection again about the
X-axis gives −g (−x) - as can be seen from (5.4).
To see how things work out in this case, consider the situation
where the string is plucked as before. As in the case of the infinite
string, the wave in this case gives rise to pulses that are half as high.
The right going wave f , however, has another piece that comes from
reflecting g (x) successively about the X and the Y axes. This part of
f (x) is not visible initially - since the string exists only for positive x. As
time goes by, the left going pulse g and the right going pulse f approach
x = 0 (f ,of course, has another part that moves away to the right).Once
they reach x = 0 and cross over - the g pulse passes into the unphysical region while the second f pulse passes into the physical one. For
a brief interval, parts of both the pulses overlap in the physical region
and then we are left with the f pulse only. You can see all this in figure
(5.5). As you can see from this, the result of all this is that a pulse
travelling towards the fixed end x = 0 gets reflected from the this end
and returns - with a reversal of sign. This is familiar feature of waves reflection from a fixed wall results in a phase reversal.
5.6.2
A semi-infinite string - free end
If the end at x = 0 is free to move, the boundary condition is quite
different . Since the net vertical force on the free end must be zero, this
leads to
∂y
(0, t) = 0
∀t ≥ 0
∂x
This means that
f 0 (−ct) + g 0 (ct) = 0
so that for x ≤ 0 we have
f 0 (x) = −g 0 (−x)
- integration leads to
f (x) = g (−x)
which allows us to find f for negative x from g (−x) which we can find
from the initial conditions.
5.6.3
A string fixed at both ends
Let us next turn to a case which is familiar from most stringed musical
instruments - a string that is fixed at both ends. This gives us the
boundary conditions :
y (0, t) = y (L, t) = 0
∀t ≥ 0.
CHAPTER 5. WAVES IN 1 DIMENSION
5.12
Figure 5.5: Reflection of pulse at a fixed end of a string. On the left
we have plotted f (x − ct) (in red) and g (x + ct) (in blue) for successive
values of t. The shaded region is unphysical (x < 0). On the right we
have plotted y (x, t) = f (x − ct) + g (x + ct) for the physical region x ≥ 0
only.
CHAPTER 5. WAVES IN 1 DIMENSION
5.13
Once again, the initial conditions will give us the values of f (x) and
g (x) in terms of the initial conditions y0 (x) and v0 (x) - but this time,
the values will be available for only the values of x ∈ [0, L]. In order to
find out y (x, t) ∀t ≥ 0, we must also know the values of f (x) for x < 0
and the values of g (x) for x > L. This is where the boundary conditions
come in. From y (0, t) = 0, ∀t ≥ 0 we get, as before
f (x) = −g (−x)
∀x < 0.
(5.14)
From the boundary at x = L we get
f (L − ct) + g (L + ct) = 0,
∀t > 0
Thus (substituting L + ct by x) gives
g (x) = −f (2L − x) ,
∀x > L.
(5.15)
Note that these two relations (5.14) and (5.15) combine to give
g (x + 2L) = −f (−x) = g (x)
or f (x − 2L) = −g (2L − x) = f (x). This shows that both f (x) and g (x)
are periodic functions with a period of 2L.
To see the effect of these boundary conditions, we consider a case
where the string is plucked at the middle and let go. In this case, the
initial conditions are
(
x
for 0 ≤ x < L2
2h L
y0 (x) =
x
2h 1 − L
for L2 ≤ x < L
v0 (x)
=
0
In the physical region, 0 ≤ x ≤ L, this means that f (x) and g (x) are both
half as high as the triangle described by y0 (x). These functions need
to be extended beyond the physical region by using (5.14) and (5.15).
Figure (5.6) describes the time evolution of the wave using y (x, t) =
f (x − ct) + g (x + ct).
You may find the nice trapezoidal shape of the string at any given
time something of a surprise. In fact, our experience with real plucked
strings tells us to expect that the shape of the string at any given instant is a sinusoidal curve. However, you must remember that real
strings have damping which is something we have ignored in our discussion so far. We are getting a bit ahead of the story here - but as we
will soon see, the wave can be thought of as a sum of lot off sinusoids
- what damping does is to make the higher harmonics die out rapidly,
leaving only the fundamental. This, of course, does not happen in our
fictitious undamped string.
It is in fact, rather easy to understand the time evolution of the
string on physical grounds. Note that the tensions at the two ends of
CHAPTER 5. WAVES IN 1 DIMENSION
5.14
Figure 5.6: Waves in a plucked string that is fixed at both ends. The
unphysical regions has been shaded. This sequence of pictures shows
only one-quarter of a time period.
CHAPTER 5. WAVES IN 1 DIMENSION
5.15
straight string cancels each other out - so that at the beginning there
is no force on any part of the string - except for the top corner! So it
is not a surprise that parts of the sides of the triangle stay stationary until the corner which is travelling down reaches them.
5.7
A tale of two strings
Let us now consider a situation where two semi-infinite strings are
joined together at x = 0. Let the speed of the wave for the string at x > 0
be c1 and that for x < 0 be c2 . So, the wave is described by
(
f1 (x − c1 t) + g1 (x + c1 t)
x>0
y (x, t) =
(5.16)
f2 (x − c2 t) + g2 (x + c2 t)
x<0
The initial conditions will yields the values of f1 , g1 for x > 0 and for
f2 , g2 for x < 0. What we need for a descrption of the wave at all times
t > 0 are the values of f1 for x < 0 and g2 for x > 0. To find these, we
need to examine what happens at the point where the two strings join.
Since the string is continuous at x = 0 (indeed, it has to be continuous everywhere - but its continuity elsewhere can be taken care of by
simply demanding that f1 , g1 , f2 and g2 be
R xcontinuous - which, in turn,
follows from the continuity of y0 (x) and ξ v0 (x0 ) dx0 ), we have
f1 (−c1 t) + g1 (c1 t) = f2 (−c2 t) + g2 (c2 t)
Writing x for −c1 t we see that ∀x ≤ 0:
f1 (x) + g1 (−x) = f2 (µx) + g2 (−µx)
where µ is the ratio cc12 . Note that in this equation the quantities g1 (−x)
and f2 (µx) are known from initial conditions - while f1 (x) and g2 (−µx)
are precisely the quantities that we need to know. This suggest rewriting the equation as
f1 (x) − g2 (−µx) = f2 (µx) − g1 (−x)
(5.17)
We need one more continuity condition. This follows from the fact that
the slopes of the two strings must match where they join (if they didn’t,
there would have been an unbalanced force on the junction - which is
not possible because the junction is massless!). This leads to
∂y
∂y
=
∂x x=0+
∂x x=0−
which means
f10 (−c1 t) + g10 (c1 t) = f20 (−c2 t) + g20 (c2 t)
CHAPTER 5. WAVES IN 1 DIMENSION
5.16
Writing x for c1 t yields
f10 (x) + g10 (−x) = f20 (µx) + g20 (−µx)
so that integration yields
f1 (x) − g1 (−x) =
1
1
f2 (µx) − g2 (−µx) .
µ
µ
Once again we can rearrange so that the terms we seek land up on the
left hand side :
f1 (x) +
1
1
g2 (−µx) = f2 (µx) + g1 (−x) .
µ
µ
(5.18)
Equations (5.17) and (5.18) can be easily solved to yield
f1 (x) =
2
µ−1
f2 (µx) +
g1 (−x)
1+µ
µ+1
and
g2 (−µx) =
∀x ≤ 0.
1−µ
2µ
f2 (µx) +
g1 (−x)
1+µ
µ+1
(5.19)
∀x ≤ 0
which can be rewritten as
1−µ
2µ
g2 (x) =
f2 (−x) +
g1
1+µ
µ+1
x
µ
∀x ≤ 0
(5.20)
Equations (5.19) and (5.20) give us all the information we need to
find the value of the wave everywhere using equation (5.16). To understand whats going on better, let us start with an initial condition in
which we only have a wave starting from a large positive x moving in
towards the junction at x = 0. In this case the initial conditions tell us
that
f1 (x) = 0,
x > 0,
and
f2 (x) = g2 (x) = 0,
x < 0.
Equation (5.19) and (5.20) then gives us the extra pieces needed to
complete the picture :
f1 (x)
=
g2 (x)
=
µ−1
g1 (−x)
µ+1
2µ
x
g1
µ+1
µ
x<0
x>0
Note that initially only g1 is nonzero in its physical region - which describes exactly a wave travelling towards the junction. If the leading
edge of the pulse is at a distance a from the junction, then the leading
CHAPTER 5. WAVES IN 1 DIMENSION
5.17
edge of the pulses f1 and g2 are at distances of a and aµ from it. It is
easy to see that all three pulses will impinge on the junction together.
At this instant, of course, only g1 is physical. After some time, g1 passes
completely into the unphysical region and disappears from view. What
we see now are the pulses f1 and g2 , which have passed into their
physical region. These are the reflected and transmitted pulses, respectively! Note that if µ = 1, there is no reflected pulse, while the
transmitted pulse is identical to the incident one. This makes perfect
sense - because when µ is 1, the two strings are really identical - there
is no junction in this case! Also note that if µ < 1 there is a sign change
between the incident pulse g1 and the reflected pulse f1 . This means
that if the pulse is travelling from a string where its speed is more to
one where its speed is less, there is a phase change on reflection. Also
realise that if the original pulse has a width δ, the transmitted pulse g2
has a width of µδ. If the incident pulse is a (perhaps modulated) sinusoid of wavelength λ - the transmitted pulse will have a wavelength of
µλ. This is consistent with the fact that the frequency of the pulse does
not change on transmission - so that the difference in speeds translate
directly to a change in wavelength.
Chapter 6
Waves and Fourier
analysis
We will now outline another way of solving the wave equation. This may
seem to be a waste of time - since we have already managed to solve the
equation! The method we will now adopt to solve the equation is a very
important one - and this will also give us the opportunity to introduce
one of the most important topics in mathematical physics.
6.1
Separation of variables
We will solve the wave equation for a string that is fixed at both ends.
Let us try to look for solutions having the special form :
y (x, t) = X (x) T (t) .
Substituting this form in the wave equation we get
T
d2 X
1 d2 T
= 2X 2
2
dx
c
dt
Next we divide both sides by XT and land up with
1 d2 X
1 d2 T
=
X dx2
c2 T dt2
This separates the two variables x and t completely - the left hand side
depends on x alone while the right hand side depends only on t. This is
what gives this method, the “separation of variables” its name. Now, if
either the left hand side or the right hand side had been non-constant
functions of x and t respectively, we could have destroyed the equality
by changing one but not the other of these two independent variables.
6.0
CHAPTER 6. WAVES AND FOURIER ANALYSIS
6.1
This means that their common value must be a constant! Now, if this
constant were positive - it would give us solutions that would grow
exponentially with time1 . To avoid this unphysical behavior2 , we conclude that this so called separation constant must be n egative and
hence write it as −k 2 . Thus we have
d2 X
+ k 2 X = 0.
dx2
This is a very familiar equation for us indeed and we can immediately
write down its solution
X (x) = A sin (kx) + B cos (kx) .
Let us now impose the boundary conditions. Since y (x, t) has to vanish
at x = 0 and x = L at all values of t, we must have
X (0) = X (L) = 0.
The first of these, X (0) = 0 tells us that B = 0, while the second leads
to
A sin (kL) = 0
Now, we can not have A = 0, for that would cause the solution to vanish
identically (y = 0 does satisfy the wave equation of course, but only it
is a rather uninteresting solution - don’t you think?) - so we have to
ensure that
sin (kL) = 0
This means that only certain values of k are allowed
k=
nπ
,
L
n ∈ Z.
so that the solution X consistent with the boundary conditions is
nπx X (x) = A sin
L
As for the function T , it obeys
1 d2 T
= −k 2
dt2
c2 T
or
d2 T
+ ω2 T = 0
dt2
2
2
±cκt . The solution with the + sign blows
solution of c21T ddtT
2 = κ > 0 is T (t) = e
up as t → ∞.
2 Note that we are really worried about the behavior of T (t). Although a positive separation constant will give us exponential behavior for X (x) as well, but since 0 ≤ x ≤ L this is not a matter of concern.
1 The
CHAPTER 6. WAVES AND FOURIER ANALYSIS
where ω = kc =
6.2
nπc
L .
Thus the general solution for T is
nπct
nπct
T (t) = C cos
+ D sin
L
L
Combining the two, we get that a solution to the wave equation of the
form y (x, t) = X (x) T (t) which obeys the boundary conditions
∀t
y (0, t) = y (L, t) = 0
is
y (x, t) = sin
nπx L
a cos
nπct
L
+ b sin
nπct
L
.
Note that I said “a solution” - not “the solution”. What we have is in
fact not one - but an infinite number of solutions - one for each integer
n! Thus we can write down the general solution as
y (x, t) =
∞
X
n=1
sin
nπx L
an cos
nπct
L
+ bn sin
nπct
L
.
(6.1)
You may have noticed that while all intger values were allowed for
n, in this final sum we have only taken positive n. This is because we
can combine the terms for +n and −n into a single term :
nπct
nπct
−nπct
−nπct
an cos
+ bn sin
+ a−n cos
+ b−n sin
L
L
L
L
nπct
nπct
= (an + a−n ) cos
+ (bn − b−n ) sin
L
L
This explain why it suffices to take positive integer values of n only all we have to do is to call the (as yet arbitrary) coefficients (an + a−n )
and (bn − b−n ) by their new names an and bn respectively. The reason
why n = 0 has been left out is slightly more subtle. At first glance the
reason is obvious - after all, if n = 0, then the term sin nπx
vanishes
L
identically - so we can easily leave it out of the sum. However, for n = 0,
which means k = 0 we actually have the equation
d2 X
=0
dx2
for X. Its solution is not A cos kx + B sin kx for k = 0, but rather X (x) =
Ax + B. It is easy to see that if we impose the two boundary conditions
this function does vanish identically - thus justifying our leaving the
n = 0 term out of (6.1).
CHAPTER 6. WAVES AND FOURIER ANALYSIS
6.2
6.3
Solving the initial value problem
Now that we have got ourselves a general solution to our boundary
value problem, it is time to move on to the next step. At this stage, our
solution (6.1) has an infinite number of arbitrary constants. To find
these constants, you need to know the initial conditions for the string :
y (x, 0) =
∂y
(x, 0) =
∂t
y0 (x)
v0 (x)
Substituting these in (6.1) gives us
y0 (x)
v0 (x)
=
=
∞
X
n=1
∞
X
n=1
an sin
bn
nπx L
nπx nπc
sin
L
L
This means that the task of finding the coefficients an and bn boils down
to the question Given a function f (x) defined on the interval [0, L] can one
write it as an infinite sum
f (x) =
∞
X
n=1
cn sin
nπx L
(6.2)
over all the sinusoids of period L, and if so, what are the
coefficients cn ?
The answer to the question as to whether this can be done is yes - at
least for the reasonable kind of functions that one expects to meet in
physics. The proof of this fact is rather too advanced for our present
course and, in any case, it is something for the mathematicians to
worry about! Once we accept that the expansion can be done, however,
finding the coefficients is a simple matter - especially if we leave the
mathematicians to worry about the little issues of rigor! For this we
simply need to know the integral
(
Z L
nπx mπx 0
for m 6= n
L
sin
dx = L
(6.3)
= δmn
sin
L
L
2
for m = n
0
2
CHAPTER 6. WAVES AND FOURIER ANALYSIS
6.4
which you can easily verify. Thus
Z
L
f (x) sin
0
mπx L
dx
∞
X
L
Z
=
0
∞
X
=
cn
sin
L
nπx 0
!
L
sin
sin
mπx L
mπx L
dx
dx
L
L
cn δmn = cm
2
2
n=1
and thus
2
L
n=1
Z L
n=1
∞
X
=
cn =
cn sin
nπx L
Z
f (x) sin
nπx L
0
dx
(6.4)
This means that we can easily find out the coefficients that we are
looking for by using
an
bn
6.2.1
2
L
=
Z
L
nπx dx
L
Z L
nπx 2
v0 (x) sin
dx.
nπc 0
L
=
y0 (x) sin
(6.5)
0
(6.6)
Plucked string
As an example, let us work out the case of a string that has been
plucked right at the middle and then released from rest, so that
(
2hx
0 ≤ x < L2
L
y0 (x) =
2h(L−x)
L
L
2 <x≤L
v0 (x)
=
0
In this case we immediately see that
∀n,
bn = 0
Again, the calculation of an can be slightly simplified to (why?)
( R
4 L/2 2hx
sin nπx
dx
for odd n
L
L
L
0
.
an =
0
for even n
A simple integration by parts gives us
an =
nπ 8h
.
sin
π 2 n2
2
CHAPTER 6. WAVES AND FOURIER ANALYSIS
6.2.2
6.5
Struck string
Consider initial conditions
y0 (x)
=
v0 (x)
=
0
(
for x − L2 < a
otherwise
v0
0
In this case, we have
6.3
an
=
0
bn
=
2
nπc
Z
L
2 +a
v0 sin
nπx L
2 −a
L
dx =
nπ nπa 4v0 L
sin
sin
n2 π 2 c
2
L
Fourier Series
For our solution of waves in a string fixed at both ends, we had to
consider the expansion (6.2)
f (x) =
∞
X
n=1
cn sin
nπx L
where f (x) could be either the initial displacement y0 (x) or the initial
velocity v0 (x) of the string. It is natural to ask at this point whether
we can expand all functions in such a way? The answer, of course is no! It is easy to see that any function that can be expanded as in (6.2)
must satisfy the following properties :
1. f (0) = f (L) = 0.
2. f (−x) = −f (x) - since each of the functions sin
nπx
L
are odd.
3. f (x + 2L) = f (x) - since each of the functions sin nπx
are periodic
L
with a period 2L for n ∈ Z.
These restrictions were not a problem for us at all. After all, our functions y0 (x) and v0 (x) had to satisfy the first restriction by the physics of
the problem. As for the other two - they do not even apply in this case
for our functions are only defined in the interval [0, L] ! However, what
if we had tried to write a sum somewhat like (6.2) for a more general
function? It is easy to see that by including cosine functions as well,
we can relax the first two conditions. If we add terms like sin (nkx) and
cos (nkx) together, we are, however, still going to end up with a periodic
function with a period of 2π
k - so we generalize (6.2) to :
CHAPTER 6. WAVES AND FOURIER ANALYSIS
6.6
A periodic function f (x) = f (x + λ) can be expanded in the
form
∞
a0 X
f (x) =
+
(an cos (nkx) + bn sin (nkx))
(6.7)
2
n=1
where k =
2π
λ
the coefficients can be found using
an
bn
=
=
2
λ
Z
2
λ
Z
λ/2
f (x) cos (nkx) dx
(6.8)
f (x) sin (nkx) dx
(6.9)
−λ/2
λ/2
−λ/2
The proofs of (6.8) and (6.9) are very similar to that of (6.4), and hinges
on, along with (6.3), two other similar relations :
(
Z L
mπx nπx 0
for m 6= n
L
cos
cos
dx =
= δmn (6.10)
L
L
L
2
for m = n
0
2
Z L
mπx nπx cos
sin
dx = 0
(6.11)
L
L
0
If the function f (x) is either even or odd, the calculation simplifies
somewhat :
Case 1 : f (x) even In this case, bn = 0 for all n and
4
an =
λ
λ/2
Z
f (x) cos
0
nπx λ
dx
(6.12)
dx
(6.13)
Case 2 : f (x) odd In this case, an = 0 for all n and
bn =
6.4
4
λ
Z
λ/2
f (x) sin
0
Fourier transforms
nπx λ
Chapter 7
Waves in three dimensions
7.0
Chapter 8
Electromagnetic waves
8.1
Electromagnetism - a lightning review
~ and B,
~
The theory of electromagnetism revolves around the fields E
defined through the Lorentz force law :
~ + ~v × B
~
(8.1)
F~ = q E
~ and H.
~ Although today we
In addition, we define auxiliary fields D
~
~
~ and H
~ as derived
consider E and B as the fundamental ones, and D
~ and H
~
quantities, for historical reasons it is customary to consider E
as fundamental fields.
Field
~
D
Definition
~ + P~
0 E
~
B
~ +M
~
µH
Constitutive Relations
i
h
~ H
~
~ E,
D
h
i
~ E,
~ H
~
B
Linear isotropic media
~
E
Vacuum
~
0 E
~
µH
~
µ0 H
~ are the polarization and magnetiIn the above, the fields P~ and M
zation vector fields, respectively.
These fields are governed by the four Maxwell equations :
~
∇·D
~
∇·B
~
~ + ∂B
∇×E
∂t
~
~ − ∂D
∇×H
∂t
=
ρ
(8.2)
=
0
(8.3)
=
0
(8.4)
= ~j
(8.5)
where ρ and ~j are the charge and current densities, respectively! Taking
the divergence of (8.5) and using (8.2) we land up with the equation of
8.0
CHAPTER 8. ELECTROMAGNETIC WAVES
8.1
continuity
∂ρ
= 0.
(8.6)
∂t
The significance of this equation is clear from its integral version (which
follows by integrating both sides over volume and using the Gauss divergence theorem)
I
dQ
= − ~j · d~s
(8.7)
dt
Σ
∇ · ~j +
where Q is the total charge in the region bounded by the closed surface
Σ. This implies that the total charge in a region decreases only by the
charge flowing out of its surface, since ~j · d~s is the charge crossing the
surface area d~s in unit time.
~
An important quantity for our discussion is the Poynting vector S
defined by
~=E
~ ×H
~
S
(8.8)
Its significance can be seen by calculating its divergence
~ = ∇· E
~ ×H
~ =∇×E
~ ·H
~ −E
~ ·∇×H
~
∇·S
!
~
~
∂B
~ −E
~ · ~j + ∂ D
·H
= −
∂t
∂t
~×B
~ =
In the above we have used the vector calculus identity1 ∇ · A
~·B
~ −A
~ · ∇ × B.
~ For linear isotropic media, we have
∇×A
~ = −~j · E
~ − ∂ E2 + µ H 2
∇·S
∂t 2
2
Since 2 E 2 + µ2 H 2 is the elctromagnetic energy density wem , this means
that
∂wem
~ −∇·S
~
= −~j · E
(8.9)
∂t
This means that the electromagnetic energy in a region can decrease
~ term) and
in two ways - by means of Joule heating loss (the −~j · E
~ term).
by transport across the surface bounding the region (the −∇ · S
So, we interpret the Poynting vector as the energy flowing through a
surface normal to it per unit area per unit time.
Maxwell’s equations also lead to the following continuity conditions
for the fields at the interface of two media (in the absence of any surface
charges or currents) :
“
”
“
”
`
´
`
´
~×B
~ = ∂i ijk Aj Bk = ijk (∂i Aj ) Bk + Aj ijk ∂i Bk = ∇ × A
~ Bk −
A
k
“
”
~
Aj ∇ × B
1∇
·
j
CHAPTER 8. ELECTROMAGNETIC WAVES
8.2
~ and H
~ are continuous across the
1. The tangential components of E
interface
~ and B
~ are continuous across the
2. The normal components of D
interface.
8.2
The wave equation in linear isotropic media
Consider a linear isotropic medium where there are no free charges.
Here, Maxwell’s equations become
~
∇·E
~
∇·B
~
~ + ∂B
∇×E
∂t
~
~ − µ ∂ E
∇×B
∂t
=
0
(8.10)
=
0
(8.11)
=
0
(8.12)
=
0
(8.13)
~ = E
~ and B
~ = µH
~ to
where we have used the constitutive relations D
~ and B.
~ Note that (8.11)
express all the four equations in terms of E
and (8.12) are independent of sources and medium - and are hence
identical to our general equations (8.3) and (8.4).
We now take curl of both sides of Faraday’s law, (8.12) to get
!
~
∂
B
~ +∇×
∇× ∇×E
=0
∂t
∂
commute (which
Now we make use of the fact that the curl and ∂t
follows from the commutativity of
mixed
partial
derivatives)
and also
2
2~
~
~
the vector calculus identity ∇ × ∇ × A = ∇ ∇ · A − ∇ A to get
~ − ∇2 E
~ + ∂ ∇×B
~ = 0.
∇ ∇·E
∂t
Using (8.10) and (8.13) in the above, we get
~ = µ
∇2 E
~
∂2E
2
∂t
(8.14)
Propceeding in a similar fashion, but starting with (8.13) would give us
~ = µ
∇2 B
~
∂2B
.
2
∂t
(8.15)
“
”
“
”
~ = ijk êi ∂j ∇ × A
~
∇×A
= ijk êi ∂j (klm ∂l Am ) = ijk klm êi ∂j ∂l Am =
k
“
”
`
´
~ − ∇2 A
~
δik δjl − δil δkl êi ∂j ∂l Am = êi ∂i ∂j Aj − êi ∂j ∂j Ai = ∇ ∇ · A
2∇
×
CHAPTER 8. ELECTROMAGNETIC WAVES
8.3
~ and B
~ obey the equation of a wave in three dimensions.
Thus both E
So, in a charge free space in a linear isotropic dielectric the electric and
magnetic fields propagate as a wave and the speed of this wave is
1
v=√
µ
(8.16)
In particular, for the speed of this wave in vacuum, we have
c= √
1
.
µ0 0
(8.17)
This comes out to be about 3 × 108 ms−1 , a value that matches the
speed of light in vacuum (which is obviously much, much greater than
the speed of anything else!). This coincidence in numerical value lead
Maxwell to the hypothesis that light is an electromagnetic wave. Of
course, this mere coincidence was not enough to convince anybody
(even Maxwell himself) of the truth of this fact. As we will see, we can
use Maxwell’s equations to predict experimentally verifiable properties
for electromagnetic waves - which turn out to match those of light! So
succesful was Maxwell in predicting the properties of light in this way
that it was soon accepted that science has finally uncovered the answer
to the vexing question - “just what is waving in a light wave?”3
8.3
Plane progressive EM waves
As we have seen, a special solution of the three dimensional wave equation is the plane progressive wave. So, in a source-free linear isotropic
dielectric, we have the solutions
~
E
~
B
where we have
=
=
~ 0 ei(~k·~r−ωt)
E
~ 0 ei(~k·~r−ωt)
B
(8.18)
(8.19)
ω
1
= √ = v.
µ
~k
Of course, we don’t really mean that the electric or magnetic field is
complex - the actual fields are real parts of the complex vectors.
We now proceed to find out what the Maxwell’s equations have to
say about the fields. For this we note that because our waves have
3 Quite a lot is often made of the fact that historically quantum mechanics had started
with a wave function (Schrödinger) even though the interpretation of just what was waving in that wave ( Born) was missing for a long time. Note that in the case of light there
was a gap of more than half a century between the discovery that light is a wave (Young)
and the discovery that it is an elctromagnetic wave (Maxwell)!
CHAPTER 8. ELECTROMAGNETIC WAVES
8.4
an exponential space and time dependence - the derivative operators ∇
∂
have very simple effects :
and ∂t
∂
≡ −iω
∂t
∇ ≡ i~k,
(8.20)
Using (8.20) in the four Maxwell’s equations (8.10-8.13) leads to the
relations
~
i~k · E
~
i~k · B
=
0,
from Gauss law
=
0,
from Gauss law for magnetism
~ − iω B
~
i~k × E
~ + µiω E
~
i~k × B
=
0,
from Faraday’s law
=
0,
from Maxwell-Ampere law
The first two conditions tell us that electromagnetic waves are trans~ and B
~ are normal to the direction of propverse - both the vectors E
~ = ω −1~k × E
~ actually says that both
agation ~k. The third condition B
of these vectors are actually normal to each other as well. Indeed, the
~ and B,
~ taken in order, form a right handed triplet of
three vectors ~k, E
mutually orthogonal vectors. Again, putting the last two of the equations together we get
2
~k × ~k × E
~k
~
~k × B
~
~
~ =−
=−
=
E
E
µω
µω 2
µω 2
~ = 0 in the last part. For this to be consistent,
where we have used ~k · E
we must have
ω2
1
2
2 = µ = v
~k
Thus, the plane progressive waves (8.18) and (8.19) denote solutions to
the Maxwell’s equations only if
ω = vk
where k = ~k is the wavenumber of the wave. With this condition in
place, the four conditions above can be reduced to the two statements
~k · E
~
~
B
where n̂ ≡
wave.
~
k
k
=
=
0
~k × E
~
ω
(8.21)
~
n̂ × E
=
v
(8.22)
is the unit vector in the direction of propagation of the
CHAPTER 8. ELECTROMAGNETIC WAVES
~kr
8.5
~kt
θr
θt
θi
~ki
Figure 8.1: Geometry of reflection and transmission at a planar interface
Let us now find the Poynting vector corresponding to such a plane
progressive wave. This is
~ ×B
~ = 1 E
~ × n̂ × E
~
~=E
~ ×H
~ = 1E
S
µ
µv
~ = 0 we arrive at
where we have used (8.22). Using the fact that n̂ · E
2
~ = E n̂
S
µv
(8.23)
Thus the amount of energy a plane progressive electromagnetic wave
carries per unit area per unit time is propotional to E 2 , the constant of
1
proportionality being µv
. In addition, this also shows that the energy
flows in the same direction as that of wave propagation (although this
sounds inevitable - it actually is not the case when light travels through
an anisotropic medium!).
8.4
Reflection and transmission of electromagnetic waves at a planar interface
Let us now turn to consider what will happen if a plane progressive
electromagnetic wave travelling through a linear isotropic medium where
its speed is v1 were to be incident at an interface with another such
medium, where its speed is v2 . For simplicity, we consider both media
to be semi-infinite and their interface to be a plane. In the following,
the incident, the reflected and the transmitted waves are denoted by
the indices i, r and t respectively.
What will happen here is determined by the continuity conditions
~ and H
~ are continuous across the
1. The tangential components of E
interface
CHAPTER 8. ELECTROMAGNETIC WAVES
8.6
~ and B
~ are continuous across the
2. The normal components of D
interface.
The fact that these conditions must be obeyed at all times and at all
points on the interface has immediate consequences.
8.4.1
Laws of reflection and transmission (refraction)
Since the time dependence of the incident, reflected and transmitted
fields are governed by the factors e−iωi t , e−iωr t and e−iωt t , respectively,
we must have
ωi = ωr = ωt = ω (say) .
Thus we have an explanation for the very important fact that frequency
does not change on reflection or transmission. Again, the fact that the
continuity conditions must work all over the interface tells us that ~ki ·~r,
~kr · ~r and ~kt · ~r must change by the same amount as we move on the
interface. This means that for two points ~r1 and ~r2 on the interface, we
must have
~ki · ~r1 − ~ki · ~r2 = ~kr · ~r1 − ~kr · ~r2 = ~kt · ~r1 − ~kt · ~r2
Since ~r1 and ~r2 are arbitrary points on the interface, we must have
~ki · ρ
~ = ~kr · ρ
~ = ~kt · ρ
~
where ρ
~ is an arbitrary vector on the interface. This means that the
vectors ~ki − ~kr and ~ki − ~kt are normal to the interface. Thus both ~kr and
~kt are in the plane of incidence - which is the plane defined by ~ki - the
direction of incidence and N̂ - the normal to the interface. Again, we
must have
N̂ × k~i = N̂ × k~r = N̂ × k~t
Taking magnitudes of both sides give us
~ki sin θi = ~kr sin θr = ~kt sin θt
Since the frequency is the same for all three waves we have
sin θi = sin θr =
v1
sin θt
v2
The first equality above gives us the law of reflection, θi = θr - while the
second one gives us Snell’s law :
sin θi
v1
=
=n
sin θt
v2
(8.24)
where n ≡ vv21 is the refractive index of the second medium with respect
to the first.
CHAPTER 8. ELECTROMAGNETIC WAVES
~i
E
~r
E
~kr
~i
B
~ki
~r
B
~t
E
~t
B
8.7
~kt
Figure 8.2: Reflection and transmission for normal incidence
8.4.2
Normal incidence
We next turn our attention to the question of how much of the incident energy is reflected and how much is transmitted. As a warm-up
exercise, we will start with the easier case of normal incidence, θi = 0.
~ i be in the plane of the paper at a given
Let the incident electric field E
~ i will
instant of time as shown in figure (8.2) . In this case, the field B
be pointing out of the plane of the paper. A reflection in the plane of
~ i , being a
the paper will leave the incident fields the same (note that B
pseudo-vector stays the same despite being perpendicular to the plane
of the reflection), and will also not affect the two media. This means
that the resulting reflected and transmitted electromagnetic fields will
~ r and E
~t must be
also stay the same under this reflection. Thus both E
~
~
in the plane (and being perpendiculer to kr and kt , respectively, must
~ t out of the plane (for the
be in the directions shown), and B~r and B
~
~
~
~r
directions of Er and Et shown, Bt must be out of the plane and B
into the plane). For this particular geometry, the normal components
of each of the fields is zero - and thus the continuity conditions for Dn
~ t and H
~t
and Bn are trivially satisfied. The continuity conditions for E
gives us the following :
Ei + Er = Et
1
1
(Ei − Er ) =
Et
µ1 v1
µ2 v2
These can be easily solved to get
Et
Ei
=
Er
Ei
=
2
2
→
µ1
1 + µ2 n
1+n
1−
1+
µ1
µ2 n
µ1
µ2 n
→
1−n
1+n
where the last part in each expression is the approximation for nonmagnetic materials for which µ1 ≈ µ2 ≈ µ0 (Note that most magnetic
CHAPTER 8. ELECTROMAGNETIC WAVES
8.8
substances are opaque to light anyway - so this is usually a good approximation to make). To find the amount of incident energy that is
reflected and transmitted we must use the Poynting vector :
~r
E
~r
S
R
≡
S~i
~t
S
T
≡
S~i
=
~i
E
2
2
1−
=
~
µ1 v1 Et
=
µ2 v2 ~
Ei
1+
µ1
µ2 n
µ1
µ2 n
!2
→
1−n
1+n
2
(8.25)
2
2
4 µµ12 n
4n
=
2 →
2
µ1
(1
+
n)
1 + µ2 n
(8.26)
As expected from conservation of energy, we have
R + T = 1.
(8.27)
Equations (8.25) and (8.26) are called Fresnel’s equations for the
special case of normal incidence. We now turn to the more general
case of oblique incidence.
8.4.3
Fresnel’s equations for oblique incidence
In the case of oblique incidence, the incident wave vector ~ki and the
normal to the interface N̂ together define a unique plane of incidence which, as we have already seen, also contains the wavevectors ~kr and
~kt . Reflecting the system in this plane does leave the wavevectors and
the media intact. However, since the electric and magnetic fields in
this case are not necessarily in and out of the plane of incidence in
this case, we no longer have the symmetry that we used while arguing
about normal incidence. However in this case it is easy to see that if
we consider the electric field to be in the plane of incidence (and then
the corresponding magnetic field must be perpendicular to it) then we
~ r and E
~ t must
do have the symmetry and hence the resulting fields E
be in the plane of incidence as before. A similar argument shows easily
~ i is perpendicular to the plane of incidence, then
that if the incident E
~ r and E
~ t . In this case, it makes sense to consider these
so must be E
~ i can
two cases separately. The case of the more general direction of E
be easily treated by superposition.
8.4.3.1
Electric fields in the plane of incidence
~ t and H
~ t gives us,
It is easy to see that the continuity conditions for E
in this case, the two equations
Ei cos θi + Er cos θr = Et cos θt
1
1
(Ei − Er ) =
Et
µ1 v1
µ2 v2
CHAPTER 8. ELECTROMAGNETIC WAVES
~kr
~r
B
8.9
~t
E
~r
E
~kt
θr
θt
~t
B
θi
~i
E
~ki
~i
B
Figure 8.3: Reflection and transmission at a planar interface for the
incident electric field in the plane of incidence
which can be rewritten in the form
Ei + Er
=
Ei − Er
=
cos θt
Et
cos θi
µ1
n Et
µ2
which are solved easily to yield
Er
Ei
=
Et
Ei
=
cos θt
cos θi
cos θt
cos θi
cos θt
cos θi
+
µ1
µ2 n
µ1
µ2 n
2
+
µ1
µ2 n
−
→
→
cos θt
cos θi
cos θt
cos θi
−n
+n
2
cos θt
cos θi
+n
To find the reflection and transmission coefficients in this case we
must consider the energy carried away in a direction normal to the
interface by the reflected and transmitted waves. Thus
~r
E
~r · N̂
S
R
≡
~i · N̂
S
=
~i
E
~t · N̂
S
T
≡
~i · N̂
S
=
1
µ2 v2
1
µ 1 v1
2
2
cos θt
cos θi
cos θt
cos θi
=
−
+
µ1
µ2 n
µ1
µ2 n
!2
→
cos θt
cos θi
cos θt
cos θi
−n
!2
(8.28)
+n
2
~ t cos θt
E
2
~ i cos θi
E
=
θt
4 µµ21 n cos
cos θi
cos θt
cos θi
+
µ1
µ2 n
2 → θt
4n cos
cos θi
cos θt
cos θi
+n
(8.29)
2
As you can easily check, we get R + T = 1 as expected.
If n > 1 it is well known that the transmitted beam bends towards
θt
the normal, i.e. θt ≤ θi , so that cos
cos θi ≥ 1 . Thus it is possible for R to
vanish for some θi . The same holds for n < 1. It is easy to see that this
happens for
cos θt
sin θi
=n=
cos θi
sin θt
CHAPTER 8. ELECTROMAGNETIC WAVES
~kr
~r
E
~r
B
8.10
~kt
~t
E
θr
θt
~t
B
θi
~i
E
~ki
~i
B
Figure 8.4: Reflection and transmission at a planar interface for the
incident electric field out of the plane of incidence
so that sin (2θi ) = sin (2θt ). Since θt =
6 θ (θ = θi is possible only for
i 2 t
6= 0), we must have
normal incidence, in which case R = 1−n
1+n
2θt = π − 2θi
or
π
2
which means geometrically that the reflected and transmitted beams
are perpendicular to each other. The angle of incidence is then easily
seen to satisfy
tan θi = n
θt + θr =
This angle of incidence is called the Brewster angle. At this angle of
incidence, the reflected beam is completely polarized with the electric
field perpendicular to the plane of incidence (as you will see soon, this
component does not vanish!).
8.4.3.2
Electric fields normal to the plane of incidence
In this case, reflection in the plane of incidence reverses both the incident electric field and the incident magnetic field (which is in the plane
of incidence in this case). Thus, the resulting reflected and transmitted
fields must be reversed on reflection as well - which means that both
~ t and E
~ r must be normal to the plane of incidence as well.
E
~ t and H
~ t leads in this case to the equations
Continuity of E
Ei + Er = Et
cos θt
cos θi
(Ei − Er ) =
Et
µ1 v1
µ2 v2
CHAPTER 8. ELECTROMAGNETIC WAVES
8.11
which leads to the solution
Er
Ei
=
Et
Ei
=
1+
µ1 cos θt
µ2 n cos θi
µ1 cos θt
µ2 n cos θi
1+
µ1 cos θt
µ2 n cos θi
1−
2
→
→
θt
1 − n cos
cos θi
θt
1 + n cos
cos θi
2
θt
1 + n cos
cos θi
In this case, the reflection and transmission coefficients are
!2
!2
θt
θt
1 − µµ21 n cos
1 − n cos
cos θi
cos θi
R =
→
θt
θt
1 + µµ21 n cos
1 + n cos
cos θi
cos θi
T
=
θt
4 µµ21 n cos
cos θi
1+
µ1 cos θt
µ2 n cos θi
which obey R + T = 1 , as always!
2 → θt
4n cos
cos θi
θt
1 + n cos
cos θi
2
(8.30)
(8.31)