Z-transform
advertisement

Digital Signal Processing a.y. 2007-2008
The Z-transform
Giacinto Gelli
gelli@unina.it
Giacinto Gelli
DSP Course – 1 / 50
Introduction to the
Z-transform
• Main motivations and
features
• Definition and notation
• Relationships with the
F-transform
• Geometrical
interpretation
The region of
convergence (ROC)
Examples
Introduction to the Z-transform
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
Giacinto Gelli
DSP Course – 2 / 50
Main motivations and features
Introduction to the
Z-transform
• Main motivations and
features
• Definition and notation
• Relationships with the
F-transform
• Geometrical
interpretation
The region of
convergence (ROC)
Examples
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
• The Z-transform is more general than the Fourier transform
(F-transform), since it converges for a larger class of signals.
• In many problems (especially in system analysis and synthesis) the
Z-transform allows one to obtain the solution more easily and
directly than the F-transform.
• For ARMA systems the Z-transform allows one to introduce the
fundamental concepts of poles and zeros of a system.
• The Z-transform is the discrete-time counterpart of the Laplace
transform, which is a well-known tool for continuous-time signals.
• The Z-transform is related in mathematics to the Laurent series.
Giacinto Gelli
DSP Course – 3 / 50
Definition and notation
Introduction to the
Z-transform
• Main motivations and
features
• Definition and notation
• Relationships with the
F-transform
• Geometrical
interpretation
The region of
convergence (ROC)
Examples
Properties of the ROC
Properties of the
Z-transform
• Definition:
X(z) =
∞
X
x[n] z −n ,
z∈C
n=−∞
Complex-valued function of the complex variable z ∈ C.
• Alternative notations:
X(z) = Z{x[n]}
Z
x[n] ←→ X(z)
Inversion of the
Z-transform
• We consider the two-sided or bilateral transform, the unilateral
P∞
−n . The two
transform is defined as X(z) =
x[n]
z
n=0
transforms coincide if the sequence x[n] is “causal”, that is,
x[n] = 0, ∀n < 0.
• More on inverse Z-transform later.
Giacinto Gelli
DSP Course – 4 / 50
Relationships with the F-transform
Introduction to the
Z-transform
• Main motivations and
features
• Definition and notation
• Relationships with the
F-transform
• Geometrical
interpretation
The region of
convergence (ROC)
Examples
• Compare the two transforms
X(z) =
∞
X
x[n] z −n ,
X(ejω ) =
∞
X
x[n] e−jωn
n=−∞
n=−∞
it is clear that X(z)|z=ejω = X(ejω ), which motivates a posteriori
our notation for the Fourier transform.
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
• More generally, letting z = rejω , one has
jω
X(z) = X(re ) =
∞
X
(x[n]r
n=−∞
−n
−jωn
)e
= F x[n]r−n
The Z-transform coincides with the F-transform of x[n] r −n .
Giacinto Gelli
DSP Course – 5 / 50
Geometrical interpretation
Introduction to the
Z-transform
• Main motivations and
features
• Definition and notation
• Relationships with the
F-transform
• Geometrical
interpretation
The region of
convergence (ROC)
Examples
• Since the Z-transform is a function of z ∈ C, it is convenient to
describe and interpret it in the complex plane. In particular, since
z = ejω ⇒ |z| = 1, the Z-transform reduces to the F-transform if
evaluated on the unit circle.
z = 1 −→ ω = 0 (low frequencies)
z = −1 −→ ω = π (high frequencies).
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
Giacinto Gelli
• The linear frequency axis of the F-transform is wrapped around
the unit circle in the complex plane ⇒ clear interpretation of the
inherent 2π -periodicity of the F-transform.
DSP Course – 6 / 50
Introduction to the
Z-transform
The region of
convergence (ROC)
• Definition
• Shape of the ROC
Examples
Properties of the ROC
Properties of the
Z-transform
The region of convergence (ROC)
Inversion of the
Z-transform
Giacinto Gelli
DSP Course – 7 / 50
Definition
Introduction to the
Z-transform
The region of
convergence (ROC)
• Definition
• Shape of the ROC
Examples
• The infinite series defining X(z) might not converge for a given
sequence and for all values of z ∈ C ⇒ define the ROC as the set
of values of z ∈ C where the series defining X(z) converges.
• A simple condition for convergence (let z = rejω ):
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
|X(z)| ≤
∞
X
n=−∞
|x[n]||z|−n =
∞
X
|x[n]|r−n < ∞
n=−∞
⇒ the sequence x[n]r−n must be absolutely summable.
• Due to multiplication with the exponential sequence r −n , note that
x[n]r−n might be absolutely summable even when x[n] is not.
◦ Example: x[n] = u[n] is not absolutely summable, but
x[n]r−n = u[n]r−n is absolutely summable for r > 1.
Giacinto Gelli
DSP Course – 8 / 50
Shape of the ROC
Introduction to the
Z-transform
The region of
convergence (ROC)
• Definition
• Shape of the ROC
Examples
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
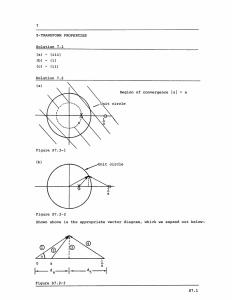
• Convergence of the Z-transform depends only on |z| ⇒ if the
series converges for z = z1 , it must converge on the circle
|z| = |z1 | ⇒ the ROC is a ring centered about the origin, possibly
extending inward to the origin and outward to infinity.
• Since the Z-transform is a Laurent series ⇒ X(z) is an
analytical or holomorphic function (continuous with all its
derivatives) within the ROC.
• If {|z| = 1} ⊆ ROC, the F-transform exists and is a continuous
function of ω (with all its derivatives).
Giacinto Gelli
DSP Course – 9 / 50
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
• The unit step
• Sequences without
Z-transform
• Rational Z-transforms
• Right-sided exponential
sequence
• Causal sequence
• Left-sided exponential
Examples
sequence
• Anticausal sequence
• Uniqueness of the
Z-transform
• Sum of two right
exponential sequences
• Sum of a right and a
left exponential sequence
• Finite-length sequence
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
Giacinto Gelli
DSP Course – 10 / 50
The unit step
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
• The unit step
• Sequences without
Z-transform
• Rational Z-transforms
• Right-sided exponential
sequence
• Causal sequence
• Left-sided exponential
sequence
• Anticausal sequence
• Uniqueness of the
Z-transform
• Sum of two right
exponential sequences
• Sum of a right and a
left exponential sequence
• Finite-length sequence
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
Giacinto Gelli
• The unit step x[n] = u[n] is not an absolutely summable signal,
hence it does not have a conventional F-transform.
• Consider instead the signal x[n]r −n = u[n]r −n ⇒ one-sided
exponential signal that is absolutely summable for r > 1 ⇒ the
Z-transform converges for r > 1 ⇒ the ROC is the outside of the
unit-circle.
• The Z-transform can be evaluated in closed-form:
X(z) =
∞
X
n=0
z −n =
1
,
−1
1−z
|z| > 1
• Since the ROC does not include the unit circle, it does not make
sense to evaluate the F-transform of x[n] = u[n] as X(z) for
z = ejω (please check the difference!).
DSP Course – 11 / 50
Sequences without Z-transform
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
• The unit step
• Sequences without
Z-transform
• Rational Z-transforms
• Right-sided exponential
sequence
• Causal sequence
• Left-sided exponential
sequence
• Not all sequences have a well-defined Z-transform, since there are
sequences for which the ROC is empty.
◦ Example: the “sinc” sequence
sin(ωc n)
x[n] =
πn
is not absolutely summable, neither when multiplied with r −n .
• Anticausal sequence
• Uniqueness of the
Z-transform
• Sum of two right
exponential sequences
• Sum of a right and a
left exponential sequence
◦ Example: the same holds for x[n] = cos(ωo n),
x[n] = sin(ωo n), x[n] = ejω0 n .
• Finite-length sequence
Properties of the ROC
Properties of the
Z-transform
• Neither of these sequences have a Z-transform, however a
(generalized) F-transform can be defined for all of them.
Inversion of the
Z-transform
Giacinto Gelli
DSP Course – 12 / 50
Rational Z-transforms
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
• Among the most important and useful Z-transforms (e.g., transfer
functions of ARMA systems) are those for which X(z) is a
rational function of z :
• The unit step
• Sequences without
Z-transform
• Rational Z-transforms
• Right-sided exponential
X(z) =
P (z)
,
Q(z)
P (z), Q(z) polynomials in z .
sequence
• Causal sequence
• Left-sided exponential
sequence
• Anticausal sequence
• Uniqueness of the
Z-transform
• Sum of two right
exponential sequences
• Sum of a right and a
left exponential sequence
• Finite-length sequence
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
Giacinto Gelli
P (z) = 0 ⇒ zeros; Q(z) = 0 ⇒ poles;
poles/zeros may occur also in z = 0 and z = ∞.
• Pole-zero diagram: a pole is denoted with ×, a zero is denoted
with ◦.
◦ Example: Z-transform of the unit step
z
1
=
.
X(z) =
1 − z −1
z−1
One zero for z = 0 and one pole for z = 1 (no zero-pole for
z = ∞). The ROC is {|z| > 1}.
DSP Course – 13 / 50
Right-sided exponential sequence
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
• Consider the right-sided exponential:
x[n] = an u[n],
a∈R
• The unit step
• Sequences without
Z-transform
• Rational Z-transforms
• Right-sided exponential
• The Z-transform is a rational function:
sequence
• Causal sequence
• Left-sided exponential
sequence
• Anticausal sequence
• Uniqueness of the
Z-transform
• Sum of two right
exponential sequences
• Sum of a right and a
left exponential sequence
• Finite-length sequence
Properties of the ROC
Properties of the
Z-transform
X(z) =
1
z
,
=
−1
1 − az
z−a
|z| > |a|
One zero for z = 0; one pole for z = a; no zero-pole for z = ∞.
The ROC is the outside of a circle (including z = ∞).
• It can be shown that the result is general, in the sense that any
right (e.g., x[n] = 0 per n < N1 ) sequence has a ROC that is the
outside of a circle (see Property 5 of the ROC).
Inversion of the
Z-transform
Giacinto Gelli
DSP Course – 14 / 50
Causal sequence
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
• The unit step
• Sequences without
Z-transform
• A causal sequence (equal to zero for n < 0) is a particular
right-sided sequence ⇒ the ROC is the outside of a circle.
• Observe that for a causal sequence only negative powers of z are
present in the series defining the Z-transform:
• Rational Z-transforms
• Right-sided exponential
sequence
• Causal sequence
• Left-sided exponential
sequence
• Anticausal sequence
• Uniqueness of the
Z-transform
• Sum of two right
exponential sequences
• Sum of a right and a
left exponential sequence
X(z) =
∞
X
x[n]z
n=0
−n
x[1] x[2]
= x[0] +
+ 2 + ...
z
z
• Such a series converges also for z = ∞ ⇒ the value z = ∞
belongs to the ROC.
• Finite-length sequence
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
Giacinto Gelli
DSP Course – 15 / 50
Left-sided exponential sequence
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
• Consider the left-sided exponential:
x[n] = −an u[−n − 1],
a∈R
• The unit step
• Sequences without
Z-transform
• Rational Z-transforms
• Right-sided exponential
• The Z-transform is a rational function:
sequence
• Causal sequence
• Left-sided exponential
sequence
• Anticausal sequence
• Uniqueness of the
Z-transform
• Sum of two right
exponential sequences
• Sum of a right and a
left exponential sequence
• Finite-length sequence
Properties of the ROC
Properties of the
Z-transform
X(z) =
1
z
,
=
−1
1 − az
z−a
|z| < |a|
One zero for z = 0; one pole for z = a; no zero/pole for z = ∞.
The ROC is the inside of a circle (including z = 0).
• It can be shown that the result is general, in the sense that any left
(e.g., x[n] = 0 per n > N2 ) sequence has a ROC that is the
inside of a circle (see Property 6 of the ROC).
Inversion of the
Z-transform
Giacinto Gelli
DSP Course – 16 / 50
Anticausal sequence
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
• The unit step
• Sequences without
Z-transform
• An anticausal sequence (equal to zero for n ≥ 0) is a particular
left-sided sequence ⇒ the ROC is the inside of a circle.
• Observe that for an anticausal sequence only positive powers of z
are present in the series defining the Z-transform:
• Rational Z-transforms
• Right-sided exponential
sequence
• Causal sequence
• Left-sided exponential
sequence
• Anticausal sequence
• Uniqueness of the
Z-transform
• Sum of two right
exponential sequences
• Sum of a right and a
left exponential sequence
X(z) =
−1
X
x[n]z −n = x[−1]z +x[−2]z 2 +x[−3]z 3 +. . .
n=−∞
• Such a series converges also for z = 0 ⇒ the value z = 0
belongs to the ROC.
• Finite-length sequence
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
Giacinto Gelli
DSP Course – 17 / 50
Uniqueness of the Z-transform
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
• The unit step
• Sequences without
Z-transform
• Rational Z-transforms
• Right-sided exponential
sequence
• Causal sequence
• Left-sided exponential
• Compare the algebraic expressions of X(z) for the right-sided and
the left-sided exponential sequences: they are exactly the same.
• Also the pole-zero diagrams are the same, but the two ROCs are
different.
• Therefore, it is necessary to specify both the algebraic expression
and the ROC for the Z-transform of a given sequence.
sequence
• Anticausal sequence
• Uniqueness of the
Z-transform
• Sum of two right
exponential sequences
• Sum of a right and a
left exponential sequence
• Finite-length sequence
• Another consequence is that to perform inversion of the
Z-transform you must specify not only X(z) but also the ROC
(otherwise the problem has many solutions).
• More on inversion later on.
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
Giacinto Gelli
DSP Course – 18 / 50
Sum of two right exponential sequences
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
• Consider the signal
x[n] =
• The unit step
• Sequences without
Z-transform
• Rational Z-transforms
• Right-sided exponential
sequence
• Causal sequence
• Left-sided exponential
1 n
u[n]
2
+
1 n
− 3 u[n]
• The Z-transform of the first term converges iff |z| > 21 , whereas
the second one converges iff |z| > 31 . The sum converges in the
intersection (if any) of the two ROCs, which is |z| > 21 .
sequence
• Anticausal sequence
• Uniqueness of the
Z-transform
• Sum of two right
exponential sequences
• Sum of a right and a
left exponential sequence
• Finite-length sequence
Properties of the ROC
Properties of the
Z-transform
• By applying the linearity property of the Z-transform, the result is:
X(z) =
1
1−
1 −1
2z
+
1
1 + 13 z −1
1
)
2z(z − 12
=
(z − 12 )(z + 13 )
Two poles (z = 1/2 and z = −1/3) and two zeros (z = 0 and
z = 1/12) (note that z = ∞ is neither a pole nor a zero).
Inversion of the
Z-transform
Giacinto Gelli
DSP Course – 19 / 50
Sum of a right and a left exponential sequence
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
• The unit step
• Sequences without
Z-transform
• Rational Z-transforms
• Right-sided exponential
sequence
• Causal sequence
• Left-sided exponential
sequence
• Anticausal sequence
• Uniqueness of the
Z-transform
• Sum of two right
exponential sequences
• Sum of a right and a
left exponential sequence
• Finite-length sequence
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
Giacinto Gelli
• Consider the signal
x[n] =
1 n
− 3 u[n]
−
1 n
u[−n
2
− 1]
It is a two-sided exponential sequence.
• The Z-transform of the first term converges iff |z| > 31 , whereas
the second one converges iff |z| < 21 . The sum converges in the
intersection (if any) of the two ROCs, which is 13 < |z| < 12 (a ring).
• By applying the linearity property of the Z-transform, the result is
X(z) =
1
1+
1 −1
3z
+
1
1 − 12 z −1
1
2z(z − 12
)
=
(z − 12 )(z + 13 )
Same X(z) and pole-zero diagram of the previous example, but a
different ROC.
DSP Course – 20 / 50
Finite-length sequence
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
• The unit step
• Sequences without
Z-transform
• Rational Z-transforms
• Right-sided exponential
sequence
• Causal sequence
• Left-sided exponential
sequence
• Anticausal sequence
• Uniqueness of the
Z-transform
• Sum of two right
exponential sequences
• Sum of a right and a
left exponential sequence
• Finite-length sequence
Properties of the ROC
Properties of the
Z-transform
• Consider the signal x[n] = an (u[n] − u[n − N ]), a ∈ R.
• One has:
1 − (az −1 )N
1 z N − aN
X(z) =
= N −1
−1
1 − az
z
z−a
with ROC = C − {0}.
• The numerator roots (zeros) are the solution of z N = aN ⇒
z = (aN )1/N = (aN ej2kπ )1/N = aej2kπ/N ,
k = 0, 1, . . . , N − 1.
• The denominator roots (poles) are z = a e z = 0 (with multiplicity
N − 1).
• Pole-zero cancellation occurs for z = a.
Inversion of the
Z-transform
Giacinto Gelli
DSP Course – 21 / 50
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
Properties of the ROC
• Properties 1-3 and 8
• Properties 4-7
• The pole-zero diagram
and the ROC(s)
• Stability, causality and
the ROC
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
Giacinto Gelli
DSP Course – 22 / 50
Properties 1-3 and 8
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
Properties of the ROC
• Properties 1-3 and 8
• Properties 4-7
• The pole-zero diagram
and the ROC(s)
• Stability, causality and
the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
Giacinto Gelli
• Assume that X(z) is a rational function.
• Property 1: the ROC is a ring or disk in the z -plane centered at
the origin, i.e., 0 ≤ rR < |z| < rL ≤ ∞.
• Property 2: the series defining the F-transform converges
absolutely iff the ROC of X(z) includes the unit circle.
• Property 3: the ROC cannot contain any pole.
• Property 8: the ROC must be a connected region.
DSP Course – 23 / 50
Properties 4-7
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
Properties of the ROC
• Properties 1-3 and 8
• Properties 4-7
• The pole-zero diagram
and the ROC(s)
• Stability, causality and
the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
• Assume that X(z) is a rational function.
• Property 4: if x[n] is a finite-duration sequence ⇒ ROC≡ C
except possibly z = 0 or z = ∞.
• Property 5: if x[n] is a right-sided sequence ⇒ the ROC extends
outward from the largest magnitude pole to (and possibly including)
z = ∞.
• Property 6: if x[n] is a left-sided sequence ⇒ the ROC extends
inward from the smallest magnitude pole to (and possibly
including) z = 0.
• Property 7: if x[n] is a two-sided sequence ⇒ the ROC is a ring,
bounded on the interior and exterior by a pole.
Giacinto Gelli
DSP Course – 24 / 50
The pole-zero diagram and the ROC
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
• The algebraic expression X(z) or the pole-zero diagram does not
completely specify the Z-transform of a sequence ⇒ the ROC
must be specified in addition.
Properties of the ROC
• Properties 1-3 and 8
• Properties 4-7
• The pole-zero diagram
and the ROC(s)
• Stability, causality and
the ROC
• The properties of the ROC limit the choice of the possible ROCs
that can be associated with a given pole-zero diagram.
◦ Example: consider
Properties of the
Z-transform
Inversion of the
Z-transform
X(z) =
1
1−
1 −1
2z
1−
3 −1
4z
1−
5 −1
4z
Three poles in z = 21 , z = 43 and z = 54 , three zeros in
z = 0.
◦ Four possible ROCs and thus four possible x[n] having X(z)
as Fourier transform.
Giacinto Gelli
DSP Course – 25 / 50
Stability, causality and the ROC
Introduction to the
Z-transform
The region of
convergence (ROC)
• For LTI systems, the ROC can be specified implicitly by the system
properties (stability and causality).
Examples
Properties of the ROC
• Properties 1-3 and 8
• Properties 4-7
• The pole-zero diagram
and the ROC(s)
• Stability, causality and
the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
◦ Example: let H(z) =
1
(1+2z −1 )(1− 21 z −1 )
⇒ poles in z = −2
and z = 21 ⇒ three possible ROCs.
◦ If the system is known to be stable ⇒ h[n] must be
summable ⇒ the H(z) must converge on the unit circle ⇒
the ROC is 21 < |z| < 2 (note that such a system is not
causal.
◦ If the system is known to be causal ⇒ h[n] must be a causal
sequence ⇒ the RC must be the outside of a circle ⇒ the
ROC is |z| > 2 (note that such a system is not stable.
◦ There is no ROC corresponding to a system that is both
stable and causal.
Giacinto Gelli
DSP Course – 26 / 50
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
Properties of the ROC
Properties of the
Z-transform
• Linearity
• Time shifting
• Multiplication by an
Properties of the Z-transform
exponential sequence
• Differentiation of
X(z)
• Conjugation and time
reversal
• Convolution
• Initial value and value
for z = 1
Inversion of the
Z-transform
Giacinto Gelli
DSP Course – 27 / 50
Linearity
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
Properties of the ROC
Properties of the
Z-transform
• Linearity
• Time shifting
• Multiplication by an
exponential sequence
• Differentiation of
X(z)
• Conjugation and time
• Let
Z
ROC = Rx1
Z
ROC = Rx2
x1 [n] ←→ X1 (z),
x2 [n] ←→ X2 (z),
one has
Z
ax1 [n] + bx2 [n] ←→ aX1 (z) + bX2 (z)
ROC ⊇ Rx1 ∩ Rx2
reversal
• Convolution
• Initial value and value
for z = 1
Inversion of the
Z-transform
Giacinto Gelli
Note: if there is no pole-zero cancellation ⇒ ROC ≡ Rx1 ∩ Rx2 ,
otherwise it could be larger.
DSP Course – 28 / 50
Time shifting
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
Z
• Let x[n] ←→ X(z), ROC = Rx , one has:
Z
x[n − n0 ] ←→ z −n0 X(z)
ROC = Rx
Properties of the ROC
Properties of the
Z-transform
• Linearity
• Time shifting
• Multiplication by an
Note: the ROC does not change except for the possibile addition or
deletion of z = 0 or z = ∞ (recall the difference between
right/causal and left/anticausal sequences).
exponential sequence
• Differentiation of
X(z)
• Conjugation and time
reversal
• Convolution
• Initial value and value
for z = 1
Inversion of the
Z-transform
Giacinto Gelli
◦ Example: evaluate
the Z-transform of
1 n−1
x[n] =
u[n − 1]. One has:
!
1
1
X(z) = z −1
=
1 − 14 z −1
z−
4
1
4
|z| >
1
4
DSP Course – 29 / 50
Multiplication by an exponential sequence (1/2)
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
Properties of the ROC
Properties of the
Z-transform
• Linearity
• Time shifting
• Multiplication by an
exponential sequence
• Differentiation of
X(z)
• Conjugation and time
reversal
• Convolution
• Initial value and value
for z = 1
Inversion of the
Z-transform
Z
• Let x[n] ←→ X(z), ROC = Rx , one has:
z0n x[n]
Z
←→ X
z
z0
ROC = |z0 |Rx
Note: the notation ROC = |z0 |Rx means that the original ROC is
scaled by |z0 |, i.e., if Rx = {rR < |z| < rL } then
|z0 |Rx = {|z0 |rR < |z| < |z0 |rL }.
Poles/zeros are scaled by z0 : if z1 is a pole of X(z), then
X(z/z0 ) will have a pole in z1 = z/z0 −→ z = z1 z0 . Since
z = |z0 |ej^z0 z1
if |z0 | > 1 the poles are expanded, otherwise if |z0 | < 1 they are
compressed or shrinked. Moreover there is also a rotation due to
ej^z0 .
Giacinto Gelli
DSP Course – 30 / 50
Multiplication by an exponential sequence (2/2)
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
• If z0 = ejω0 one has:
jω0 n
e
Z
−jω0
x[n] ←→ X ze
Properties of the ROC
Properties of the
Z-transform
• Linearity
• Time shifting
• Multiplication by an
exponential sequence
• Differentiation of
X(z)
• Conjugation and time
reversal
• Convolution
• Initial value and value
for z = 1
Inversion of the
Z-transform
which evaluated for |z| = 1 i.e. z = ejω reduces to the
frequency-shift property of the F-transform:
jω0 n
e
F
j(ω−ω0 )
x[n] ←→ X e
◦ Example: evaluate the Z-transform of
x[n] = rn cos(ω0 n)u[n], with r > 0. Start from the
Z-transform of u[n], express x[n] with the Euler formula and
apply linearity, ending up with
1 − r cos(ω0 )z −1
X(z) =
1 − 2r cos(ω0 )z −1 + r2 z −2
Giacinto Gelli
ROC = {|z| > r}
DSP Course – 31 / 50
Differentiation of X(z)
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
Properties of the ROC
Z
• Let x[n] ←→ X(z), ROC = Rx , one has:
d
n x[n] ←→ −z X(z)
dz
Z
ROC = Rx
Properties of the
Z-transform
• Linearity
• Time shifting
• Multiplication by an
exponential sequence
• Differentiation of
X(z)
• Conjugation and time
reversal
• Convolution
• Initial value and value
for z = 1
Inversion of the
Z-transform
Giacinto Gelli
◦ Esempio: evaluate the Z-transform of y[n] = nan u[n].
1
Knowing that X(z) = 1−az
−1 for |z| > a, by differentiation
one has:
az −1
az
=
Y (z) =
−1
2
(1 − az )
(z − a)2
Note that it has one zero in z = 0 and a second-order pole in
z = a.
DSP Course – 32 / 50
Conjugation and time reversal
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
Properties of the ROC
Properties of the
Z-transform
• Linearity
• Time shifting
• Multiplication by an
exponential sequence
• Differentiation of
X(z)
• Conjugation and time
Z
• Let x[n] ←→ X(z), ROC = Rx , one has:
x∗ [n]
Z
←→ X ∗ (z ∗ )
ROC = Rx
Z
x∗ [−n] ←→ X ∗ (1/z ∗ ) ROC = 1/Rx
Z
x[−n] ←→ X(1/z)
ROC = 1/Rx
Note: the notation ROC = 1/Rx means that the ROC is inverted,
i.e., if Rx = {rR < |z| < rL } −→ 1/Rx = { r1 < |z| < r1 }.
L
R
reversal
• Convolution
• Initial value and value
for z = 1
Inversion of the
Z-transform
Giacinto Gelli
◦ Example: Z-transform of di x[n] = a−n u[−n], one has:
−a−1 z −1
1
=
X(z) =
1 − az
1 − a−1 z −1
|z| < |a−1 |
DSP Course – 33 / 50
Convolution
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
Properties of the ROC
Properties of the
Z-transform
• Linearity
• Time shifting
• Multiplication by an
exponential sequence
• Differentiation of
X(z)
• Conjugation and time
• Let
Z
ROC = Rx1
Z
ROC = Rx2
x1 [n] ←→ X1 (z),
x2 [n] ←→ X2 (z),
one has
Z
x1 [n] ∗ x2 [n] ←→ X1 (z) X2 (z)
ROC ⊇ Rx1 ∩ Rx2
reversal
• Convolution
• Initial value and value
for z = 1
Inversion of the
Z-transform
Giacinto Gelli
Note: if there is no pole-zero cancellation ⇒ ROC ≡ Rx1 ∩ Rx2 ,
otherwise it could be larger.
DSP Course – 34 / 50
Initial value and value for z = 1
Introduction to the
Z-transform
• Initial value: Let x[n] be a causal sequence, one has
The region of
convergence (ROC)
Examples
x[0] = lim X(z)
z→∞
Properties of the ROC
Properties of the
Z-transform
• Linearity
• Time shifting
• Multiplication by an
exponential sequence
• Differentiation of
X(z)
• Conjugation and time
reversal
• Convolution
• Initial value and value
for z = 1
Inversion of the
Z-transform
Giacinto Gelli
• Value for z = 1: if the unit circle belongs to the ROC, one has:
X(1) =
∞
X
x[n]
n=−∞
It corresponds to the property of the value for ω = 0 of the
F-transform.
DSP Course – 35 / 50
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
• Introduction
• Power series
Inversion of the Z-transform
expansion
• Inspection method
• Partial fraction
expansion
• Case M < N and
simple poles
• Case M < N and
multiple poles
• Case M ≥ N and
simple poles
• Case M ≥ N and
multiple poles
• The remove/restore
technique
Giacinto Gelli
DSP Course – 36 / 50
Introduction
Introduction to the
Z-transform
The region of
convergence (ROC)
Examples
Properties of the ROC
Properties of the
Z-transform
Inversion of the
Z-transform
• Introduction
• Power series
• There is a formal inverse Z-transform expression that is based on
the Cauchy integral theorem
1
−1
x[n] = Z {X(z)} =
2πj
I
X(z)z n−1 dz
C
where C is a counterclockwise closed path contained in the ROC
and encircling all the poles of X(z).
expansion
• Inspection method
• Partial fraction
expansion
• For rational Z-transforms, which are typically encountered in
practice, less formal procedures are preferred:
• Case M < N and
simple poles
• Case M < N and
(1) power series expansion;
multiple poles
• Case M ≥ N and
simple poles
• Case M ≥ N and
multiple poles
• The remove/restore
technique
Giacinto Gelli
(2) inspection method;
(3) partial fraction expansion.
DSP Course – 37 / 50
Power series expansion (1/2)
• Since
X(z) = . . . + x[−2]z 2 + x[−1]z + x[0] + x[1]z −1 + x[2]z −2 + . . .
if we can express X(z) as a power series, we can determine any value of
x[n] by finding the coefficient of z −n in the power series.
◦ Example: let X(z) = 1−z1 −1 with ROC = {|z| > 1}. By the
geometrical series expansion, we get:
1
−1
−2
=
1
+
z
+
z
+ ...
1 − z −1
from which we obtain (compare with the general expression):
x[0] = 1, x[1] = 1, x[2] = 1, . . .
and x[n] = 0, ∀n < 0 ⇒ x[n] = u[n].
Giacinto Gelli
DSP Course – 38 / 50
Power series expansion (2/2)
• In many cases X(z) is already a polynomial in z −1 (e.g., when X(z) has
only zeros and no pole except perhaps for z = 0) thus the previous approach
is very simple.
◦ Example: Let X(z) =
z2
1−
1 −1
2z
straightforward algebra we get:
(1 + z −1 )(1 − z −1 ). By
X(z) = z 2 − 21 z − 1 + 21 z −1
from which we obtain (compare with the general expression):
1,
1
−
2,
x[n] = −1,
1
,
2
0,
Giacinto Gelli
n = −2,
n = −1,
⇒ x[n] = δ[n+2]− 12 δ[n+1]−δ[n]+ 21 δ[n−1]
n = 0,
n = 1,
otherwise.
DSP Course – 39 / 50
Inspection method
• It simply consists of recognizing “by inspection” certain transform pairs,
possibly using the Z-transform properties and taking into account the ROC.
• A common case is to choose between a right/left exponential sequence:
1
a u[n] ←→
1 − az −1
1
Z
n
−a u[−n − 1] ←→
1 − az −1
n
Z
ROC = {|z| > |a|}
ROC = {|z| < |a|}
• A useful generalization is (for m ≥ 1):
n+m−1 n
1
Z
a u[n] ←→
m−1
(1 − az −1 )m
n+m−1 n
1
Z
−
a u[−n − 1] ←→
m−1
(1 − az −1 )m
Giacinto Gelli
ROC = {|z| > |a|}
ROC = {|z| < |a|}
DSP Course – 40 / 50
Partial fraction expansion (1/2)
• This is the most general method for inverting rational Z-transforms. Assume
that
X(z) =
M
X
k=0
N
X
k=0
zN
bk z −k
=
ak z −k
zM
M
X
k=0
N
X
bk z M −k
=z
ak z N −k
N −M
PM (z)
QN (z)
k=0
where PM (z) and QN (z) are polynomials of degrees M and N ,
respectively, and bM , aN 6= 0 .
◦ M zeros and N poles, different from zero;
◦ if N − M > 0, N − M zeros at z = 0; if N − M < 0, M − N poles
at z = 0; no poles/zeros for z = ∞;
◦ same overall number max(M, N ) of poles/zeros (check!).
Giacinto Gelli
DSP Course – 41 / 50
Partial fraction expansion (2/2)
• Find the roots of the polynomials and rewrite X(z) as:
X(z) =
b0
a0
M
Y
(1 − ck z −1 )
k=1
N
Y
(1 − dk z −1 )
k=1
◦ ck are the (nonzero) zeros;
◦ dk are the (nonzero) poles.
• Different cases are possible:
◦ M < N or M ≥ N ;
◦ simple or multiple poles.
Giacinto Gelli
DSP Course – 42 / 50
Case M < N and simple poles (1/2)
• The rational X(z) can be expressed as
X(z) =
N
X
k=1
Ak
1 − dk z −1
where the Ak ’s can be determined as:
Ak = (1 − dk z −1 )X(z)
z=dk
Thus the inverse Z-transform is found by using linearity and the inspection
method, accounting for the ROC.
• Note that it is more useful in general to consider the numerator and
denominator of X(z) as polynomials in z −1 instead of polynomials in z .
Giacinto Gelli
DSP Course – 43 / 50
Case M < N and simple poles (2/2)
• Example: let:
X(z) =
1 − 41 z −1
1
1 − 21 z
,
−1
ROC = {|z| > 21 }
Two poles in z = 1/4 and z = 1/2, two zeros in z = 0. By partial fraction
expansion we get:
2
−1
X(z) =
1 −1 +
1 −1
1 − 4z
1 − 2z
Since, accounting for the ROC, x[n] must be a right-sided (causal) sequence,
then by linearity and inspection we get:
x[n] = −
Giacinto Gelli
1 n
u[n]
4
+2
1 n
u[n]
2
DSP Course – 44 / 50
Case M < N and multiple poles
• Example: let:
X(z) =
1
1 − 41 z −1
1 − 21 z −1
2 ,
ROC = {|z| > 21 }
A simple pole in z = 1/4 and a double pole in z = 1/2, three zeros in z = 0.
The partial fraction expansion can be written as:
X(z) =
1
1−
1
4z
−
−1
2
1−
1
2z
+
−1
2
1−
1 −1 2
2z
where the coefficients can be found by a slight generalization of the previous
example (see the textbook), or by solving a linear system of equations.
• Accounting for the ROC, x[n] must be a right-sided (causal) sequence, then
by linearity and inspection we get:
x[n] =
Giacinto Gelli
1 n
u[n]
4
−2
1 n
u[n]
2
+ 2(n + 1)
1 n
2
DSP Course – 45 / 50
Case M ≥ N and simple poles (1/2)
• In this case we must first perform the division between the numerator and the
denominator, ending up with a polynomial of degree M − N and a remainder
of degree N :
X(z) =
M
−N
X
Br z
r=0
−r
+
N
X
k=1
Ak
1 − dk z −1
where the Br ’s are obtained by the division and the Ak ’s by partial fraction
expansion of the remainder.
• Note that the inverse Z-transform of the first term is simply obtained by the
time shifting property as
M
−N
X
Br δ[n − r]
r=0
whereas for the inversion of the second term we must account for the ROC.
Giacinto Gelli
DSP Course – 46 / 50
Case M ≥ N and simple poles (2/2)
• Example: let:
(1 + z −1 )2
1 + 2z −1 + z −2
X(z) =
,
1 −2 =
1 −1
3 −1
−1
1 − 2z
(1 − z )
1 − 2z + 2z
ROC = {|z| > 1}
Here M = N = 2, two simple poles in z = 1/2 and z = 1, a double zero in
z = 1.
• By polynomial division and subsequent partial fraction expansion we get
9
8
−1 + 5z −1
X(z) = 2 +
1 −2 = 2 −
3 −1
1 −1 + 1 − z −1
1 − 2z + 2z
1 − 2z
Since, accounting for the ROC, x[n] must be a right-sided (causal) sequence,
then by linearity and inspection we get:
x[n] = 2 δ[n] − 9
Giacinto Gelli
1 n
u[n]
2
+ 8u[n]
DSP Course – 47 / 50
Case M ≥ N and multiple poles
• In this case we must first perform polynomial division, then apply the same
procedure for multiple poles.
• The general expression is rather cumbersome so it is not reported here.
Giacinto Gelli
DSP Course – 48 / 50
The remove/restore technique (1/2)
• An alternative procedure that can be applied when M ≥ N is the
“remove/restore” technique [Orfanidis].
• Example: consider
6 + z −5
X(z) =
1 −2 ,
1 − 4z
ROC = {|z| > 12 }
• Instead of performing polynomial division, let us simply “remove” the
numerator and develop partial fraction expansion of the remaining term (the
reciprocal denominator):
W (z) =
1
1−
1 −2
4z
=
1−
1
2
1 −1
2z
+
1+
1
2
1 −1
2z
Accounting for the ROC, the inverse-transform is
w[n] =
Giacinto Gelli
1
2
1 n
u[n]
2
+
1
2
1 n
− 2 u[n]
DSP Course – 49 / 50
The remove/restore technique (2/2)
• Once w[n] is known, one can obtain x[n] by “restoring” the numerator:
X(z) = (6 + z −5 )W (z) = 6W (z) + z −5 W (z)
Using the time shifting property, we find:
x[n] = 6w[n] + w[n − 5] = 3
1 1 n−5
u[n − 5] + 21
+2 2
1 n
1 n
u[n] + 3 − 2 u[n]
2
1 n−5
u[n − 5]
−2
• The same result (although in a different form) can be obtained by performing
division and then partial fraction expansion. The expression is
x[n] = −16δ[n − 1] − 4δ[n − 3] + 19
Giacinto Gelli
1 n
u[n]
2
− 13
1 2
− 2 u[n]
DSP Course – 50 / 50