BNQ30703
advertisement

i\t
CONFIDENTIAL
HM
Universitl lUn Hussein Onn Malaysia
T]NIVERSITI TUN HUSSEIN ONN MALAYSIA
FINAL EXAMINATION
SEMESTER
sEssroN
II
201s12016
COURSENAME
PROCESS CONTROL
COURSE CODE
BNQ 30703
PROGRAMME CODE
BNN
EXAMINATIONDATE
JUNE IJULY 2016
DURATION
3 HOURS
INSTRUCTION
ANSWERS FOUR (4) QUESTIONS
ONLY
THrS QUESTTON pApER CONSTSTS OF FOURTEEN (14) PAGES
CONFIDENTLq..L
CONFIDENTIAL
Ql (a)
BNQ 30703
List SIX (6) basic components in a feedback control loop system.
(3 marks)
(b)
Briefly describe process gain, K.
(3 marks)
(c)
hopose controllers which fulfills the following requirement and provide relevant
explanation.
The reactor is a continuous flow stined tank reactor (CSTR), in which the controlled
variable is the liquid volume. It is extremely important that the volume is at the set
point, the system provides a quick respond to changes in the set point, and large error
is not allowed.
(3 marks)
(d)
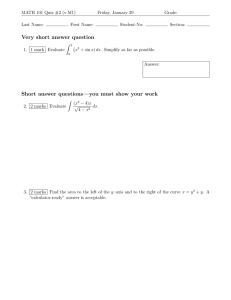
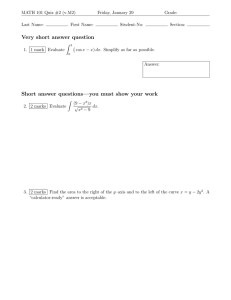
Figure Ql(d) shows a level confoller in a CSTR. Explain how the liquid level
contoller controls the level of the fluid within the CSTR by using the details given in
the figure.
(6 marks)
Controller
Error
;
Set
Point
Measured
Signal
Figure Ql(d)
CONFIDENTIAL
t
|
r(
CONFIDBNTIAL
(e)
BNe3o7o3
Consider a continuous flow stined tank reactor (CSTR) with a feedback controller
where the controlled variable is the liquid level with the following transfer functions.
G"
=l(s+l)
G"=IG
Gp:1(2s+l)
G':l(s+l)
Go:1
where
G
is the conffoller ffansfer function
G" is the transfer function for final control element
Go is the process transfer function
G, is the transfer function for measuring element and transmitter
Ga is the disturbance transfer function
Analyze the range oflGwhich makes the closed loop response stable. Neglect the effect
ofdisturbances.
(10 marks)
Q2 (a)
The Proportional-integral-derivative (PID) controller algorithm involves simple
calculations. Describe the importance of the calculations during the development of
the algorithm and for the practice of process control.
(2 marks)
(b)
Identiff the units of Kc
(c)
A PID controller must be initialized every time it is "tumed on" (or placed in automatic
mode) by the plant personnel. Data when the conftoller is placed in automatic mode
are given below.
and the sign for stabilizing negative feedback.
(4 marks)
Data
Set
point:
100 oC
oC
Measured controlled variable = 98
Derivative of the controlled variable = 0
Signal to control valve 63.7 Yo open
Controller Gairu Kc = 230 o/ol"C
Controller integral time 4.50 minutes
Controller derivative time: 0.67 minutes
:
:
(i)
State the type of transfer
(ii)
Perform the initialization calculation.
(1 mark)
(5 marks)
CONFIDENTIAL
CONFIDENTIAL
(d)
BNQ 30703
The feedback PID controller has been implemented to control the concenfration of the
reactant in the reactor effluent from a CSTR. The system is shown in Figure Q2(d)
below.
ft*,rg*istrI
Solu*nt
r{"
,** B ,i *fa '*
}r
C*
ffi,Fs
inmcfiffit
Sffis
filBrt*nt
f*
mhF*
F*#&
Figure Q2(d)
(i)
causes for the feedback dynamics to change in the process
in
Figure
indicated
Q2(d). For each causes, examine how the change affects
Identiff the
the dynamics.
(4 marks)
(ii)
One of the major reasons for feedback control is to compensate for
disturbances. Analyze several disturbances that would affect the reactant
concentration.
(4 marks)
(e)
Describe the advantages and disadvantages
control system.
of distributed computing in a digital
(3 marks)
(0
successful feedback control systems, the objective for the
manipulated variable must be fully understand. State the objective forthe manipulated
variables and briefly describe the importance.
(2 marks)
In
order
to design
CONFIDENTIAL
CONTIDENTIAL
Q3
(a)
BNQ 30703
(D
Define'block diagram'.
(ii)
f,haw a block and arrows diagram consists of a single block with one input
and one output.
(l
(l
(b)
Figure Q3 (b) below shows
a tank
mark)
mark)
with two inlet flows.
Figure Q3 (b)
The liquid level ofthe tank is to be confrolled by manipulating (controlling) flow A. It
is assumed that flow A is much larger than flow B. The ratio between flow B and A is
specified ag FnlFt = fr, where f is a given ratio. Assume that it is necessary to have
local flow contnol loops around each valve. Illustate a process diagram ofa control
system for this process.
(4 marks)
CONFIDENTIAL
CONFIDENTIAL
(c)
BNQ 30703
A block diagram is shown in Figure Q3(c) below.
Figure Q3(c)
IrA.
(i)
Develop a single tansfer function from input Ytpzto output Yz, assuming
(2 marks)
(ii)
If
the inner loop has proportional-only controller for Gcz, and G, : 3, and
Gp2(s):6 | (2s+1), calculate a oonstraint (inequaltty) for the value of .Kcso
that the inner loop still has stable behaviour.
(4 marks)
CONFIDENTIAL
CONFIDENTIAL
(d)
BNQ 30703
Figure Q3(d) below shows a heated liquid tank where the temperature T shall be
controlled using feedback with PID controller in combination with feedforward
control.
P,,..fffiffi's};i'
.,f'[ffi.,.,,
ffiffi:'fi--"
S :::irts::,:+ii,iijiii#i:j+#'
,ffin.eo
,ll-,.T.[ffi.,;[,€l
#ry
Figure Q3(d)
We assume the following process model, which is based on energy balance:
cpt't(t1 =
gy1} * cre 1l',{fi -
?'{t)i =
r
[&{t)
- r(t)}
P
ofthe liquid in the tank, fn[Kl is the inlet temperature,
fe lK)is environmental temperature, c [y(kg K)] is specific heat capacity, w [kg/s] is
mass flow (same in as out), V lm3l is the liquid volume, p Ikglm3l is the liquid density,
U t(J/s)/Kl is the total heat transfer coeflicient, P: Knu [J/min] is supplied power via
heating element where Knis aparameter (gain) and u [%] is the control signal applied
to the heating element. cpV T is the (temperature dependent) energy of the liquid in
the tank. Consider Tin and ?e as disturbances, but the derivation of the feedforward
function F/is not dependent of such a classification.
Where T
(D
[K]
is the temperature
Derive the feedforward function from the process model above.
(6 marks)
(ii)
Distinguish which parameters and variables must have known values to
implement the feedforward control.
(2 marks)
COI{FIDENTIAL
CONFIDBNTIAL
(e)
BNQ 30703
Given a system with the following equatiotr,
Mx: F-dx-lu
where
?
is the position
is the speed
is the acceleration
x
x
Fis the force (control signal, z)
d and k are constants
Develop a block diagram for the system.
(3 marks)
(D
Recommend the correct equivalent ofthe block diagram given in Figure Q3(f) below.
(2
Q4
(a)
(i)
(iD
Define 'cascade control'.
State when cascade control
marks)
(l
will give improved performance
mark)
than conventional
feedback control.
(1 mark)
(b)
In a neutralization section of a fertilizer production plant intermediate mother liquor
flows into and out of a tank. In the tank the pH value of the liquid is controlled by
adjusting the inflow of ammonia gas to the tank. The ammonia flow is controlled using
a control valve.
(D
Illustrate the instrumentation diagram ofthis process.
(3 marks)
(ii)
Explain the purpose of the ammonia flow control loop.
(1 mark)
CONFIDENTIAL
CONFIDENTIAL
(c)
BNQ 30703
Consider the following liquid storage tank shown in Figure Q4(c) with a orosssectional area of 3 ft2. The valve characteristios is given by Fo - grlh.
Figure Q4(c)
(i)
show that the linearized process has a first order characteristics.
(5 marks)
(ii)
(d)
Calculate the time constant of the system at an operating level of 9 ft.
(l
mark)
Consider two tanks in series as shown in Figure Q4(d). F, h andA represent the liquid
flow rate, height of liquid and cross sectional area of tank respectively. Assume that
the flow rate of an effluent sfieam from a tank is proportional to the cubic root of the
liquid height.
g
F
n'-.
--'
[*, -{;
-,
z6
*
I
?
/fi
4
t
I
Vft"
a
*-|'
..'L7
Figure Q4(d)
Establish a Laplace transfer function based model relating input-output variables
which is intended to control height of liquid in the second tank.
(8 marks)
CONFIDENTIAL
CONFIDENTIAT
(e)
BNQ 30703
Figure Q4(e) below shows a ship. The control variable is the position of the ship.
Assume that it is beneficial for the positional contnol system that the rotational speed
of the propeller is also controlled.
Based on the given information" propose the
purposes ofthe contol loops forthe ship
(3 marks)
Rn*rtimnl
ssed
sF[rH]r
R$n$snaf
*pecd
mafisllsr
Figure Q4(e)
(f)
Given a temperature sensor which represents temperatures, 1', in the range of 15 55oC, with a measupment signal (current), M, rnthe range of 4 - 20 mA, with a linear
relation between these ranges. Determine the scaling function with C as input and T
as output on the following form:
T= alll + b
(2 rnarks)
10
CONFIDENTIAL
CONFIDENTIAL
BNQ 30703
Q5 (a) (i)
Define 'acceptable stability'
(ii)
Define'controller tunning'.
(i)
Explain the term 'overide controlo.
(b)
(l mark)
(l mark)
(2 marks)
(ii)
(c)
Describe whether there any processes for which open loop excitation should
not be used.
(2 marks)
Figure Q5(c) below shows a simple drilling machine.
Csntr:ol-cafi
{UplOowrd5tcady}
Ccntrol*dftll
{odCIfn
F*sitton p-hlgh
ContmLstart
tilrd0ff)
fu{easured
pasitinn
h{eas-p
C$ntfirl-clantp
{OnlOffi
Fusttl*n p*lrw
Ierc pasltlcn
Wo*plece
Figure Qs(c)
Sketch a Sequential Function Chart (SFC) with steps, actions and transitions solving
the control task given above. The operation of the machine is described below.
tlv control signal
pressed,
it pops up
has
been
Control;tart to value On. Just afier the the button
(his
reset is not a
automatically qnd Controlistart is automatically set back to Off
part of tlrc control task inthis exercise). When the driUing operationhas been started,
the clamps are activated by setting tlrc control signol Control-clamp to On, tlrc drill
starts rotating with Control_drill set to On, and the cart is moved dowtwards with
Control_cart set to Down until the measured drill position Measl becomes p-low.
Then, the cart is automatically moved upwards with Control-cart set to Up. When the
Measlt has become p_high, the cart is stopped with Control-cart set to Steady, the
clamp is released with Control_clamp set to Off, and the drill is stopped with
Control_drill set to Ofi, Then tlp drill is idle, waiting until the Start button is again
The drilling operation is started with the Start button which sets
pressed.
(6 marks)
ll
CONFIDENTIAL
CONFIDENTIAL
(d)
BNQ 30703
The circuit in Figure Q5(d) below is the basis of a temperature controller. Study the
diagram answer the questions below.
sin
*r{T*.T*}
Figure Qs(d)
(i)
Examine the circuit function and how does it work.
(3 marks)
(ii)
Determine the type of additional circuit needed between the output and the
heater.
(2 marks)
(iii)
(iv)
Explain why there is a diode in series at the output.
(l
mark)
Summ arize on how you would improve the circuit.
(2 marks)
(e)
Given a controller with analog output (control sigrral) in the range 0 -20 mA. Suppose
the controller is to be used to control a device (e.g. a pump) that only takes voltage in
the range 0 - l0 V. Convert the current control signal to a corresponding voltage
control signal.
(3 marks)
t2
CONFIDENTIAL
"
CONFIDENTIAL
(0
BNe 30703
Given the following transfer function:
rf{s}- e,+3s+2
= "13 '
(i)
(iD
Determine the order of the above equation.
(l
mark)
(l
mark)
Propose the characteristic equation.
.EI\ID OF QUESTIONS.
l3
CONFIDENTIAL
"t
I
CONFIDENTIAL
BNQ 30703
FINAL DGMINATION
SEMESTER/SESSION
COURSE
PROGRAMME : 3BNN
:PROCESSCONTROL COURSECODE :8NQ30703
:SEMII/20lsnOrc
Formula
-, 4EH* - fud*+ihJil,ff*{r}*, ffr* ffifS
Lrrtt3
4 c*fs#*t
' fr{r}
Jf
-cr} -,Irwa
+=F{c;o
rtT
E't*)=SP(rl-Cl"(tl
a
-:_T
gS * r
st#l . + f strldr-r'
-r
*ffit = ttl*f*'n'
&
Fr
t
I
J
fr{t}'=EI*i(s}
f
ZlZi:fI/(t+
IIe)
,dh
dEf=Ft-4-lS
,4t*l
ndti)
,= .F(*)
ts
- ry{{l- Ifrft)
*sX*
+..s)
T4
CONFIDENTIAL