Physics Letters A 357 (2006) 218–223
www.elsevier.com/locate/pla
Chaos control of ferroresonance system based on RBF-maximum entropy
clustering algorithm
Liu Fan ∗ , Sun Cai-xin, Si-ma Wen-xia, Liao Rui-jin, Guo Fei
Key Lab of High Voltage and Electrical New Technology of Ministry of Education, Chongqing University, Chongqing 400044, PR China
Received 22 November 2005; accepted 23 May 2006
Available online 5 June 2006
Communicated by A.R. Bishop
Abstract
With regards to the ferroresonance overvoltage of neutral grounded power system, a maximum-entropy learning algorithm based on radial
basis function neural networks is used to control the chaotic system. The algorithm optimizes the object function to derive learning rule of
central vectors, and uses the clustering function of network hidden layers. It improves the regression and learning ability of neural networks.
The numerical experiment of ferroresonance system testifies the effectiveness and feasibility of using the algorithm to control chaos in neutral
grounded system.
© 2006 Elsevier B.V. All rights reserved.
Keywords: Neutral grounded power system; Chaos control; Radial basis function; Maximum-entropy principle
1. Intruduction
In an electrical power system, the ferroresonance overvoltage makes the voltage and the current increase sharply, and it
may cause the burn-out of potential transformers, as well as the
severe accident such as external insulation flashover, lighting
arrester explosion [1]. In a power system, the research of chaos
control in chaos state generated by ferroresonance is under hot
discussion [2–5].
At present, the experts have presented many methods, in regards to the pure control of chaos system, such as parameter
perturbation technique [6], which is suitable for the discrete dynamics system, and whose controlling object is low periodic
orbit; feedback control technique [7–9], which utilizes the system parameter as the control signal to feedback to the system;
optimum control technique [10], using switch to control, which
need a little control energy to realize the chaos control, and
whose control object is balance points only. We know that the
cognition to chaos system will greatly restrict its control.
* Corresponding author.
E-mail address: liufan2003@yahoo.com.cn (L. Fan).
0375-9601/$ – see front matter © 2006 Elsevier B.V. All rights reserved.
doi:10.1016/j.physleta.2006.05.072
Refs. [11–15] brought forward the control method based on
the radial basis function neural network, which realized the
chaos control. When the type and number of basic function
are all known, the learning algorithms mainly include the Cmeaning value and Kohonen clustering [16]. To greatly increase
the regression ability of network, it is plausible to train the network using the error backward propagation algorithm similar to
the multi-layer perception model. But the BP algorithm’s calculation is very complex, and the immanent features of the RBF
network are neglected.
An efficient control of power systems can greatly influence
the energy requirements to meet the required quality. Since the
power systems are highly nonlinear and is required to track
a determined equilibrium solution, the conventional PID controller, which has been employed widely in some other applications, cannot provide adequate control performance. In such
cases, the linear controllers may only be valid in an infinitesimally small neighborhood of the reference steady state operating points. Therefore, advanced nonlinear control strategies
should be used to handle such systems [17]. More recently,
efforts have been directed at control of chaos in dynamical
system. Thus, emphasis has been placed on design techniques
which result in prescribed nonlinear dynamics for controlled
L. Fan et al. / Physics Letters A 357 (2006) 218–223
processes. Refs. [18,19] used the globally linearizing control
method as an approach to nonlinear control design. This method
allows an exact linearization of an input–output map of the nonlinear control design. This Letter seeks to improve the radial
basic function neural network with maximum-entropy learning
algorithm, use the algorithm to learn the dynamics characteristic of the ferroresonance chaos system, and then utilize the
improved neural network to control the chaos. One of the features of the control method is that the learning rule of central
vector is derived from optimum of object function, which fully
utilizes the clustering ability of the network hidden layers, and
improves the network’s regression ability. At the same time, using such method, the analytic model of the object is not necessary. The control target can be periodic orbit or object function
which is changing continuously. And the control is also in effect
when measuring noise exists.
219
By simple calculations, we can get the analytic solution of
(2) to eliminate λ, then we can get the following function:
JT (c) = min LT (c, λ)
λ
q
x − cj 2
exp −
,
= T ln q − ln
T
(4)
j =1
so question (1) changes to a cluster unrestricted optimum questions, whose objective function JT (c) is differentiable, thus the
gradient descent method will derive the new clustering algorithm, which is called maximum entropy clustering algorithm
(MECA), in the algorithm the adjustment equation of central
vector cj is as follows
cj (t) = cj (t − 1) + 2η(t)λj k xk − cj (t − 1) .
(5)
Where
2. The maximum entropy learning algorithm of the RBF
network
RBF neural network is one of the partly convergent neural
networks, the numbers of the neuron of input layer, hidden
layer, and output layer are n, q, and m, and the learning of
weight vector wl is based on the derivation from minimum
error function. Because the hidden layer of RBF network has
a clustering effect to input samples, the weight vector cj can
be confirmed using clustering algorithm. The hard C-meaning
algorithm is based on minimum j to fix on cj . It is more a
heuristic progress than an optimum progress.
2.1. Maximum entropy clustering algorithm
In practical uses, the samples in sample set X are usually
supposed to be mutually independent. For the generality of research, considering:
min min x − cj 2 ,
c
j
where x ∈ n .
(1)
This is a compound minimum problem. Refs. [20,21] use maximum entropy to present the effective algorithm which can resolve minimax problem. Using analysis of Ref. [22] to minimax
problem, we have constituted the compound minimum question:
min LT (c, λ) = L(c, λ) + T ln q − H (λ) ,
λ
L(c, λ) =
q
λj x − cj .
(2)
λj k = −
∂JT (c)
= λj (xk ),
∂cj (t − 1)
η(t) is the learning step length. The key question of using
MECA to train RBF neural network’s central vector is the selecting criteria of the parameter T .
Here the randomness of clustering is the so-called “hard”.
Thus in clustering progress, the bigger value of T should be
chosen first, and decrease the value gradually, so that the random level will wane towards the “hard” state.
2.2. The control method based on RBF-MECA
Chaos system has the inherent feature that it is extremely
sensitive to small disturbance outside. This Letter seeks to realize the control through partial linear in neighborhood of the
fixed point, and put on little parameter disturbance. Considering
the following chaos system:
x(k + 1) = f x(k), p + u(k).
(6)
Where x ∈ R n is the state of the system, p is the system parameter, u is the control item. Letting u(k) = 0 in (6) and then
getting
x(k + 1) = f x(k), p
(7)
using RBF-MECA learning relation of the input and output of
(7), we can get the neural network model of the system:
x̂(k + 1) = fˆ x(k), p .
(8)
The disturbance used to control unstable periodic orbit is
(3)
j =1
q
Where T is Lagrange multiplier, H (λ) = − j =1 λj ln λj is
Shannon entropy. Since minj (x − cj 2 ) is always GE zero, it
is expected that the LT , which is approaching minj (x − cj 2 )
is GE zero too. Then if H (λ) ln q is known, min(−H (λ)) and
min(ln q − H (λ)) are equal.
δpn =
λu
fu (Xu − XF (P0 ))
·
,
λu − 1
fu g
(9)
where fu , λu are the reversible characteristic vector and characteristic root of the partial mapping matrix M = DX F (XF ,
P0 ); DX denotes f mapping is differentiated by state vector
X, XF which is the fixed point of f mapping; P0 is the initial value of the adjustable parameter; and g ≡ DP F (XF , P0 )
is the changing value which is caused by fixed point changing
220
L. Fan et al. / Physics Letters A 357 (2006) 218–223
following the changing of control parameter p; DP is f mapping differentiated by p. According to the (9), the disturbance
is put in chaotic systems, if the next iteration is in the fixed
point stable manifold, latter iteration will be attracted to a fixed
point, and the periodic 1 orbit will depart from chaos attractor
and enter into the stable periodic orbit. The chaos is controlled
based on (9), allowing the noise disturbance. The noise form is
εδn , which is the Gauss unit random parameter whose mean is
zero and constantly used to weigh noise intensity. To ensure the
effectiveness of control, we can suppose δpn will not exceed
certain value δpmax . From (9) we know the maximum distance
from the chaos orbit of disturbance control progress to fixed
u
≡ fu (Xmax − XF (P0 )) = |(1 − λ−1
point is Xmax
u )fu g|δpmax
namely the noise can be controlled in |δnu | < δpmax , then only if
u , the control is effective. The neural network is
εδpmax < Xmax
trained according to (9), and then the learning process finishes,
the network can be treated as chaos controller.
According to stability theorem of discrete system, the controller is designed as
u(k) = −fˆ x(k), p + xr (k + 1) + l x(k) − xr (k) .
(10)
Fig. 1.
Where xr (k) is the expectance objective.
The error is defined:
e(k) = x(k) − xr (k).
(11)
Then
e(k + 1) = x(k + 1) − xr (k + 1)
(12)
(12) is substituted to (8), then:
e(k + 1) = f x(k), p − fˆ x(k), p + xr (k + 1)
+ l x(k) − xr (k) − xr (k + 1).
(13)
If the neural network could move towards the system which is
display by (7), the error system is
e(k + 1) = l x(k) − xr (k) = le(k).
(14)
According to the stability theorem of discrete system [23], selecting |l| < 1 makes the system (14) asymptotic stable.
3. Chaos control of ferroresonance system
3.1. State one: Noisefree
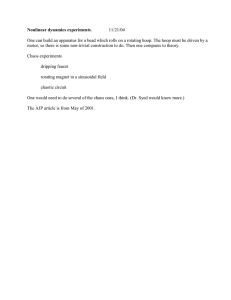
In the neutral grounded system, the typical configuration of
substations prone to ferroresonance is as Fig. 1 [24]. CB0 is the
bus coupling breaker, CB1 and CB2 are the circuit breakers, and
they all equipped with the equalizing capacitance at the fracture. The DS is a disconnect switch, PT 1 , PT 2 are bus potential
transformers, and T1 and T2 are power transformers. When ferroresonance starts, the breaker and disconnect switch are all in
opened state, so transformers are not in the resonance circuit.
Whether ferroresoance happens in bus 1 or bus 2, the principle is the same. For example, when either one of CB0 and CB1
has been opened, while the other one is broken, ferroresonance
still happens. The coupling capacitance is neglected, and single
phase resonance circuit is as Fig. 2a. ES is the power source,
Fig. 2.
Cpg is the equalizing capacitance, Cpg is the earth capacitance
of equivalent system, L is excitation inductance of PT, and R
is the core loss of PT.
According to Theremin’s theorem, the Fig. 2a is simplified
the resonance circuit shown as b. Where ES = e sin ωt, E =
2Cgra ES
2Cgra +Cpg , C = 2Cgra + Cpg . E is the power source amplitude,
R is the core loss of potential transformer, and L is the excitation inductance. To make it easy, the frequency, current,
magnetic flux, etc. are all normalized. The conductance of bus
to earth and inter phase capacitance is neglected. After transformation and simplification, the differential equation of the circuit
is:
d 2φ
dφ
iL
+
+
= gω cos ωt.
RC dt
C
dt 2
2C
E
gra
1
supposing q = RCω
is
Where g is driving force, g = C
dφ
the damp factor; u = dt the differential equation is adjusted as:
du
iL
(15)
+ qu +
= g cos ωt.
ωdt
ωC
Where supposing the current which flow through transformer
is iL , and it is composed with a seven exponent equation [14]
iL = aφ + bφ 7 , φ is the transformer magnetic linkage, here a =
3.42, b = 0.41, C = 400 pF.
When E = 5 p.u., ω = 1 p.u., g = 2, 1/q = 0.06 and R is
set to 50 M, corresponding the loss of 500 W. According to
the set parameters, the differentiable equation is formed, and
Runge–Kutta–Fehlberg algorithm is used to solution and iteration. The phase trace of chaos response is shown in Fig. 3.
The algorithm chooses the substep in the interval which
length is h, and every iteration could get two solutions with
L. Fan et al. / Physics Letters A 357 (2006) 218–223
221
Fig. 4.
Fig. 3.
high accuracy and iteration speed and different discrete error.
The idea of RBF-MECA is put into the equivalent circuit of
ferroresonance substation, and then we can get:
iL
du
= gω cos ωt − quω − ,
dt
C
and its numerical computation is discreted:
x(k + 1) = gω cos ωt (k) − qx(k)ω −
aφ(k) + b[φ(k)]7
. (16)
C
Designing controller:
u(k) = −fˆ x(k) + xr (k + 1) + l x(k) − xr (k) .
(17)
When the control is operated, the system is
aφ(k) + bφ(k)7
+ u(k).
C
(18)
Here, the algorithm is the learning process of weight vector
through two stages: first, using MECA to train central vector
to have sufficient knowledge, and then train weight vectors of
output layer. The algorithm is using online sequence mode to
1
, and the selecting criteria of α(t) is
learn. Definition: T = α(t)
x(k + 1) = gω cos ωt (k) − qx(k)ω −
αmax t − α0
t
max t
where: max t = 30000 is the biggest iteration times, and t is
the iteration time at present, αmax t = 2000 and α0 = 20 is
the value of α when t is the biggest iteration time and zero
separately. According to the discrete equation (16), 500 samples [x(k), t (k), φ(k); x(k + 1)] (k = 0, 1, 2, . . . , 499) can be
acquired, where: sequence of t (k) set up the fixed time interval. 480 frontal sample data pairs are used to train network
and the input and output model is: xk+1 = f (xk , φk , tk ). Setting: l = 0.04, the control is operated in the 500th step, and the
control target is xr (k) = 0, then the system output after chaos
control is shown as Fig. 4. It is indicated that using RBF-MECA
algorithm can easily control the system state to the expected
α(t) = α0 +
Fig. 5.
fixed point. In such system, we put into control in 250 steps,
the control target is xr (k) = 0.25 + 0.2 sin(kπ/100), and the
control result is shown as Fig. 5.
When the control is put into operation in the 250th step, the
control target is xr (k) = 0.4, after control, the output of the
chaos system is shown as Fig. 6. From the Fig. 4 to Fig. 6, it
is obvious that using the controller with the maximum entropy
clustering algorithm of RBF neural network can effectively
control the ferroresonance chaos system. As the long-time numerical experiment indicated, the algorithm could make the
ferroresoance system evolve from the chaos state to expectancy
periodic orbit, or make the high value of chaos over voltage invert to harmonics voltage which has lower amplitude. Both of
them decrease imperilment to the power system, consequently
the transition between chaos and ordering is realized when the
ferroresonance happens in neutral grounded system.
222
L. Fan et al. / Physics Letters A 357 (2006) 218–223
Fig. 8.
Fig. 6.
Fig. 7.
4. Conclusion
With regards to the problems of ferroresonance overvoltage
of the neutral grounded power system, this article suggests use
the maximum entropy clustering algorithm to improve the RBF
neural network, and use the network to control the chaos of
the ferroresonance system. The numerical experiment has been
done, and the result is obvious. The method has the following
characteristics: (1) it could be put into control process at different time and the output after control is stable and effective. (2)
The control target can be periodic orbit or continuously changing function, and process is efficient. (3) In the condition of
measuring noise, the result of chaos control is also evident.
Because the ferroresonance overvoltage, which is generated
by in neutral grounded system does great harm to high voltage
power grid, it has the great significance to research the physical
mechanics and control methods, to ensure the stable running of
electrical power system, and increase the reliability of electrical
equipment running. Future research needs to be done on the
subject.
3.2. State two: Noisy condition
References
Under such condition, the flat noise, whose meaning is zero
and variance is the millesimal of measured value amplitude,
is put into the data to build the model. And the RBF neural
network model which is based on maximum entropy algorithm is build up by the data with noise. At the same time,the
model is used in the controller which is shown in (17). The
measuring data of (17) also has the measuring noise. Under
this condition, the chaos control of ferroresonance system is
to be achieved as followed: setting: l = 0.03 and the control are in operation in the 500th step, and the control target
is xr (k) = 0.2 sin(πk/100). The result of control is shown in
Fig. 7. The tracing error curves are shown in Fig. 8. From the
Fig. 7 and Fig. 8, we can conclude that the algorithm is still effective using the neural network, which is build up by data with
measuring noise to control the chaotic system with measuring
noise.
[1] T. Van Craenenbroeck, IEEE Trans. Power Delivery 18 (4) (2003) 1592.
[2] E. Zia, A.T.A. Bashar, et al., IEEE Trans. Circuits Systems 48 (6) (2001)
757.
[3] Y. Yu, H. Jia, P. Li, Electric Power Systems Research 65 (3) (2003) 187.
[4] K. Ai-Anbarri, R. Ramanujam, et al., Electric Power Systems Research 65 (1) (2003) 1.
[5] Z. Jing, D. Xu, Y. Chang, Int. J. Electrical Power Energy Systems 25 (6)
(2003) 443.
[6] E. Ott, C. Grebogi, J.A. Yorke, Phys. Rev. Lett. 64 (11) (1990) 1196.
[7] K. Pyragas, Phys. Lett. A 170 (6) (1992) 421.
[8] U. Toshimitsu, Y. Shigeru, Phys. Lett. A 264 (1) (1999) 30.
[9] K. Pyragas, Phys. Lett. A 180 (1) (1993) 99.
[10] G.A. Gonzale, Int. J. Bifur. Chaos 5 (2) (1995) 559.
[11] E.N. Sanchez, J.P. Perez, L.J. Ricalde, Proc. IEEE Conf. Decision Control 4 (2001) 3536.
[12] V.E. Bondarenko, Chaos Solitons Fractals 13 (1) (2002) 139.
[13] P.M. Alsing, A. Garielides, Phys. Rev. E 49 (1994) 1225.
[14] T.W.S. Chow, J.-C. Feng, K.T. Ng, IEEE Trans. Circuits Systems I Fund.
Theory Appl. 47 (2000) 902.
L. Fan et al. / Physics Letters A 357 (2006) 218–223
[15] X. Jiang, Z. Wang, Controlling chaos by RBF neural network based on GA
optimization, WCICA 2004, Fifth World Congress on Intelligent Control
and Automation, IEEE Conf. Proc. 2 (2004) 1267.
[16] H. Yu, Y. Liu, J. Peng, Chaos Solitons Fractals 22 (4) (2004) 787.
[17] A. Isidori, Nonlinear Control Systems, third ed., Springer-Verlag, 1989.
[18] C. Kravaris, AIChE J. 33 (1987) 592.
[19] M. Henson, AIChE J. 36 (1990) 1753.
223
[20] J. Zhang, Appl. Math. Lett. 17 (6) (2004) 717.
[21] M.S.R. Chowdhury, E. Tarafdar, K.-K. Tan, Nonlinear Anal. 43 (2) (2001)
253.
[22] S.A. Ei-Wakil, A. Elhanbaly, Physica A 323 (2003) 213.
[23] H. Huo, W. Li, Appl. Math. Comput. 153 (2) (2004) 337.
[24] Y. Li, W. Shi, et al., IEEE Trans. Power Delivery 18 (3) (2003) 1009.