Adaptive Control for PWM Dc-to-Dc Converters Operating in
advertisement

7
3URFHHGLQJVRIWKHWK0HGLWHUUDQHDQ&RQIHUHQFHRQ
&RQWURO$XWRPDWLRQ-XO\$WKHQV*UHHFH
Adaptive Control of PWM Dc-to-Dc Converters
Operating in Continuous Conduction Mode
Said EL BEID*, Said DOUBABI*, Mohammed CHAOUI**
*: Laboratoire d'Automatique et d'Informatique Industrielle, FSTG, Université Cadi Ayyad, Marrakech,
Morocco. said.el-beid@etudiant.univ-reims.fr ; saidprofe@yahoo.fr
**: Laboratoire d'Automatique et de Productique, ENSEM, Université Hassan II, Casablanca, Morocco.
Abstract— This paper presents the application of adaptive
control to PWM Dc-to-Dc Converter Operating in
Continuous Conduction Mode. The system under study is a
buck-boost with parasitic as non linear and variable
structure plant. First the model of converter is discussed;
the non linearity is handled with state space averaged
modeling into the linear time-varying representation; one
adopted consequently an on-line identification of the
converter parameters which rests on the exploitation of the
Recursive Least Squares (RLS) algorithm to take into
account great variations of the operating point, and the
controller adaptation is based on a pole placement strategy.
The synthesis of the regulator lends particularly well to be
put under the shape of an intelligent algorithm which the
self-tuning can be elaborated on-line.
Simulation results show the improvement of the dynamic
responses and the robustness against load variations or
parameters variations.
In this communication, an application of the techniques
of adaptive control for a Buck-Boost PWM Dc-to-Dc
Converter is described.
II. BUCK-BOOST CONVERTER MODELING
We consider the buck-boost converter shown in Fig 1
where Rl, and Rc denote the internal resistors of inductor,
and capacitor, respectively. Vg, and iL, denote supply
voltage and current in inductance respectively. R, Y,
designate, respectively load and output voltage.
Te and Ts denote respectively the sampling period and
the switching period. D is the duty cycle where D=ton/Ts
and D’=1-D, D ∈[0, 1]; (ton = switch on duration).
Let us consider xc = [iL, vc ]T as instantaneous state
vector of converter. In continuous conduction mode, two
configurations following the state of switch sw will be
obtained as shown in fig.2:
Index Terms— Adaptive control, PWM Dc-to-Dc
Converter, Recursive Least Squares (RLS) algorithm.
I.
INTRODUCTION
I
n many situations, the increasing complexity of
processes has for consequence to see the dynamic
properties of the system evolving, would be it that
slowly, during time. The recursive identification
algorithms are particularly adapted to this type of
problem. Several adaptive methods were proposed since
the 70s [1] to provide models which parameters vary with
regard to the process changes, their main objective
consists in estimating, in a substantial and on-line way, a
model of the process studied to make decisions in real
time according to the last information acquired on the
process while minimizing, memory resources and time of
calculation, and by supplying a reliable and robust model
of the process.
PWM Dc-to-Dc Converters have recently aroused an
increasing deal of interest in modern electronic
equipments due to their compactness and high efficiency
[2]; they are used for almost all analogue and digital
electronic systems especially as regulated DC voltage. In
the realm of control engineering, they represent an
interesting study case as they are variable structure non
linear systems, and can be subject to disturbances of
different causes (electromagnetic, offsets, etc.).
Figure 1. Buck-boost converter scheme
Figure 2.
Figure 2. Buck-Boost converter configurations
7
3URFHHGLQJVRIWKHWK0HGLWHUUDQHDQ&RQIHUHQFHRQ
&RQWURO$XWRPDWLRQ-XO\$WKHQV*UHHFH
represent respectively the mean state vector and the mean
output voltage:
A. Steady-state:
In steady state, all the variables take static values, and
the state space system for every configuration can be
written as:
ɺ = Ai X + bi
X
i=1 for fig.2.a
Y = ci X
i=2 for fig.2.b
With:
− RL
L
A1 =
0
−1
C ( R + Rc )
0
− R L + R c // R
L
A2=
R
( R + Rc ) C
c2=[R//RC
R
R + Rc
1
, b1= L
, c1= [0
0
R
R + Rc
]
,b2= 0 ,
−1
0
( R + R c ) C
−R
L ( R + Rc )
∫
1
Ts
t+Ts
x(τ)dτ = X + x̂ m (t)
t
∫
t
t+Ts
y(τ)dτ=Y+yˆ m (t)
System in transient state is governed by the state space
system according to:
xɺ m = [ dA1 +d'A 2 ] x(t)+ [ d.b1 +d'.b 2 ] v g
y m = [ d.c1 +d'.c 2 ] x
d' = 1-d
(1)
].
− R + (1 − D ) R // R
c
L
L
A=
R (1 − D )
R + Rc ) C
(
C = (1 − D ) R // Rc
D
L ( R + Rc )
, B =L,
−1
0
( R + Rc ) C
ˆ
ˆ
xɺˆ m (t)=A(D)xˆ m (t)+B1 (D)xˆ m (t)d(t)+B
2 (D)d(t)
ˆ
ˆ
yˆ m (t)=C(D)xˆ m (t)+D1 (D)xˆ m (t)d(t)+D
2 (D)d(t)
R + Rc
R
(1 − D )
D
2
R
1 − D RL + D (1 − D ) R // Rc + R (1 − D )2
α
(1)
β
α : Ideal transfer function.
β : Correction factor due to the capacitor and inductor
uncertainties.
B. Transient state:
In this section, the developed small signals model,
allows obtaining a good approximation of the converter
behaviour around the operating point towards a load
variation.
We assume that each variable can be written as the
sum of a constant component (noted in upper-case letter)
and a small varying one (noted in hat lower-case letter).
Hence:
ˆ
ˆ , vg(t) = Vg+ v̂ (t) iL(t)=IL+
d(t) = D+ d̂(t) et d'(t)=
- d(t)
g
vc(t)=Vc+ v̂c (t) , R(t)=R+ r̂ .
ˆ
xɺˆ m (t)=[A+(DAˆ 1 +D'Aˆ 2 )]xˆ m (t)+[A1 +Aˆ 1 -A 2 -Aˆ 2 ]xˆ m (t)d(t)
ˆ
ˆ
ˆ
+(b1 +bˆ 1 -b 2 -bˆ 2 )vˆ g (t)d(t)+[A
1 +A1 -A 2 -A 2 ]X
ˆ
ˆ +D'bˆ )vˆ (t)
+(b1 +bˆ 1 -b 2 -bˆ 2 )vˆ g ]d(t)+(Db
1
2
g
(2)
ˆ
ˆ
ˆ
ˆ
+(DA1 +D'A 2 )X+(Db1 +D'b 2 )Vg
ˆ
yˆ m (t)=[c+(Dcˆ1 +D'cˆ 2 )]xˆ m (t)+[c1 +cˆ1 -c 2 -cˆ 2 ]xˆ m (t)d(t)
ˆ
+(c1 +cˆ1 -cˆ 2 -cˆ 2 )Xd(t)+
Dcˆ1 +D'cˆ 2 )X
Between nTs and (n+1)Ts, we suppose that v̂g (t) =0 and
ˆ = 0,bˆ =0, cˆ = 0 ; after some manipulations,
r̂ =0 then A
i
i
i
non linear model is obtained according to:
− R (1 − D )
That gives the transfer function relating the output
voltage to the input voltage:
îL (t) ,
y m (t)=
1
Ts
For a load variation, one replaces respectively Ai,bi,ci,
ˆ ,b +bˆ ,c +cˆ in the model (1) (i=1,2), thus the
by Ai +A
i i i i i
transient state space becomes so:
During each sampling period Ts, the state space system
becomes:
ɺ = A X + B Vg
X
Y=CX
with : A = D.A1 + D’.A2
B = Db1+ D’.b2= Db1
C = D.c1 + D’.c2
After some manipulations one obtains:
Y = Vg
x m (t)=
xˆ m (t) and yˆ m (t)
(3)
With:
A(D) = D.A1 + (1-D).A2
B1(D) = A1- A2
B2(D) = (A1- A2).X + (b1-b2).Vg=(A1- A2).X + b1Vg
C(D) = D.c1 + (1-D).c2
D1(D) = c1 – c2
D2(D) = (c1 – c2).X
The next task is to synthesise a model giving the
relation between the output voltage and the duty cycle
around D.
By neglecting the second order terms in equations set
(3), the dynamic state space system becomes:
ˆ
xɺˆ m (t)=A(D)xˆ m (t)+B2 (D)d(t)
ˆ
yˆ m (t)=C(D)xˆ m (t)+D 2 (D)d(t)
(4)
Where from the control to output voltage transfer
function around the operating point is given by:
H(s) =
ŷ m (s)
d̂(s)
= C(D)(sI-A(D))-1B2(D) + D2(D)
7
3URFHHGLQJVRIWKHWK0HGLWHUUDQHDQ&RQIHUHQFHRQ
&RQWURO$XWRPDWLRQ-XO\$WKHQV*UHHFH
The buck-boost converter given in figure 1 has the
following parameters:
L = 18.45mH Rl = 1.23Ω, Rc = 0.12Ω, R = 50Ω, C =
470µF,
Thus:
Hd(s) =
(s-z 0 )(s-z1 )
yˆ m (s)
=k
ˆd(s)
(s-s 0 )(s-s1 )
y*(t) = [q-1BM(q-1)/ AM(q-1)] u(t)=Hm(q-1)u(t)
Where:
k=0.0306;
z0=-6230.9;
z1=17730;
s1=56.992+i253.67; s2= 56.992 - i253.67. s is the Laplace
operator.
It is about a system with nominimum phase feature
[3],[7], so one must take into account it during the
elaboration of the control law.
In order to implement digital control, the transfer
function (Hd(s)) is discretized, with the following
sampling period: Te=10Ts=500µs.
Hd(z-1) =
yˆ m (z -1 )
-1
-1
=
b 0 +b1 z +b 2 z
-1
-2
-2
=
B(z-1 )
-1
A(z )
d̂(z )
1+a1 z +a 2 z
Where: b0 = 0.4, b1 = -0.8, b2 = 0.2, a1 = 0.7497,
a2=0.2431.
III.
P(q-1) = 1+p1q-1+…..+pnpq-np is an asymptotically stable
polynomial which specifies the desired dynamic of
regulation.
y*(t) : Reference sequence defining the system
dynamics during tracking, it is generated by the following
transfer function of reference model:
POLE PLACEMENT ADAPTIVE CONTROL
Generally Hm(q-1) is determined from wished dynamic
performances by choosing w0 and ζ.
β is a scalar introduced to obtain unitary dc-gain in
closed loop between y(t) and y*(t) such as:
1/b 0 If b 0 ≠ 0
1 else
β =
So, the control objective in (7) can be accomplished by
a pole placement strategy [5] such as:
S(q-1)D(q-1)u(t)+R(q-1)y(t) = P(q-1)β y* (t+d)
=T(q-1)y*(t+d)
Where S(q-1) and R(q-1) are the solution of the
following Diophantine equation:
P(q-1)=A(q-1)D(q-1)S(q-1) + q-1B(q-1) R(q-1)
A. Law control:
The Buck-Boost converter is considered as a CARIMA
model [4], having a representation of the follow form:
Thus, we finally get the control law [5]:
u(t) =
A(θ(t),q-1) y(t) = B(θ(t),q-1) q-d u(t) + w(t)
(5)
1
[T(q -1)y*(t+d)-R(q -1 )y(t)] (8)
S(q -1)D(q -1)
This can be represented by “fig.3”:
A(θ(t),q-1) = 1+a1(t)q-1 + …+ana(t)q-na ;.
B(θ(t),q-1) = b0+b1(t)q-1 + …+bnb(t)q-nb ;.
θ(t)=[a1(t),..,ana(t),b0(t),..,bnb(t)]T
B. Pole placement Adaptive control :
Where θ(t) is the parameters vector. y(t), u(t) and w(t)
denote the output, input and disturbance sequences,
respectively. A(θ(t),q-1), B(θ(t),q-1), are polynomials in the
backward-shift operator q-1 with respective orders na, nb.
The sequence w(t) is assumed to be modelled as:
w(t) = C(q-1)[D(q-1)]-1ξ(t) where :
D(q-1)=1-q-1 introduces an integral action in control law.
ξ(t) is a white noise process.
The noise polynomial C(q-1)=1 here for simplicity of
exposition.. In order to develop the control law, we
assume besides that ξ(t) is identically zero, (Afterward
one will take into account disturbances during the on-line
identification). Thus, the system model (5) becomes:
A(θ(t), q-1) D(q-1) y(t) = B(θ(t), q-1)u(t-d).
The control law that we have just elaborated supposes
that the converter is without uncertainties, in that follows
one is going to use an adaptive control to on-line estimate
process parameters of which will be used afterward to
establish an adaptive control.
The controller scheme is given in “fig.4”
The (RLS) algorithm is used as parameters estimator
using output/input signals. Let us:
(6)
Let us consider the following control objective that
contains both the regulation case and the tracking one:
Figure 3. PP regulator
P(q ) [y(t)- βB(q ) y*(t)] = 0
-1
Where :
-1
(7)
ϕ(t-1) = [-y(t-1),….., -y (t-na), u(t-d-nb)]T,
θ(t)=[a1(t),..,ana(t),b0(t),..,bnb(t)]T
7
3URFHHGLQJVRIWKHWK0HGLWHUUDQHDQ&RQIHUHQFHRQ
&RQWURO$XWRPDWLRQ-XO\$WKHQV*UHHFH
ϕ(t-1): Being the observation vector of the converter.
The RLS estimation consists in determining the
ˆ
parameters vector θ(t)
which minimizes criterion
according to [6]:
T
2
[y(k)- θˆ (t )ϕ (k)]
k=1
•
•
Implanting the adaptive control law in (9).
Wait for the end of sampling period to begin
again.
t
J(t) = ∑
That leads to the following algorithm:
θˆ(t ) = θˆ(t − 1) +
T
F ( t − 1)ϕ ( t − 1) y ( t ) − θˆ ( t − 1) ϕ ( t − 1)
T
1 + ϕ ( t − 1) F ( t − 1)ϕ ( t − 1)
1
F(t)=
F ( t − 1) −
λ1 (t )
T
F ( t − 1)ϕ ( t − 1)ϕ ( t − 1) F ( t − 1)]
λ1 ( t )
T
+ ϕ ( t − 1) F ( t − 1)ϕ ( t − 1)
λ2 ( t )
Where:
λ1,λ2 are forgetting factors, F is matrix of adaptation
gain.
IV. SIMULATION AND RESULTS
To validate our approach, we present in that follows the
results of simulation for a dc-dc Buck-boost converter of
figure1 which characteristics are previously mentioned,
for the following operating point: Y=30v, D=0.5.
The tracking performances are chosen by a polynomial
which has:
w0 = 0.5 and ζ = 0.9, which gives after discretisation:
BM(q-1)= 0.0928 + 0.0687 q-1
AM(q-1)= 1-1.2451 q-1 + 0.4066 q-2
The dc performances are chosen by a polynomial which
has w0=0.4 and ζ = 0.9, which gives after discretisation:
1
F(0)= I npr 0 <ε<<1 npr = dim(θ) =dim(ϕ)
ε
0<λ(t)≤1 et 0<λ2(t)<2.
The new control law is given with estimated
ˆ -1 ), R(q
ˆ -1 ) and T(q
ˆ -1) using the estimated
polynomials S(q
parameters vector θˆ (t) :
u(t) =
1
ˆ -1 )y*(t+d)-R(q
ˆ -1 )y(t)]
[T(q
Ŝ(q-1)D(q -1 )
(9)
“Fig.4” describes the strategy of the PP adaptive
controller:
In every sampling period the parameters of the converter
model are estimated first of all, and then those of the
controller are calculated, where from algorithm according
to:
• Acquisition of y(t)
•
Estimation
of
the
converter
{ } {
}
-1 ˆ ˆ
ˆ
ˆ ˆ
parameters θ(t)
⇒ A(θ(t),q
).B(θ(t),q -1 ) .
•
Calculation of S(q-1), R(q-1) and T(q-1) according
ˆ as if it was
to wished performances and to θ(t)
the real parameters vector of the converter.
P(q-1)= 1+0.7371 q-1 -0.1653 q-2
ξ(t) is Gaussian noise centred of variance 1.
λ1=0.95, λ2=1. F(0)=105, θ(0)=[0,0,0,0,0]T.
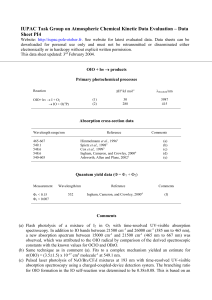
“Fig.5” shows an on line estimation of parameters
vector, One notices that from an initial value being worth
zero of parameters vector, the estimator manages quickly
to track real values in spite of the presence of a noise
acting on the process.
We used the auto-correlation of identification error to
verify the performance of parameters estimator [5]. Fig.6
shows that this auto-correlation is lower than 0.17, which
means that identification error is close in a white noise, so
1
a1
0.8
0.6
b0
0.4
a2
0.2
b2
0
-0.2
-0.4
-0.6
b1
-0.8
-1
Figure 5. Adaptive PP regulator
0
100
200
300
400
500
600
Figure 4. On-line parameters estimation: Real parameters in
dotted line, estimated parameters in solid line.
7
3URFHHGLQJVRIWKHWK0HGLWHUUDQHDQ&RQIHUHQFHRQ
&RQWURO$XWRPDWLRQ-XO\$WKHQV*UHHFH
according to the criterion of Landau [5], our estimated
model is confirmed.
To evaluate the performances of the proposed
controller, we present firstly the regulation results for a
steps reference variation (from 30v to 45v, then from 45v
to 20v, and finally from 20v to 30v) with extern
disturbance, one observes the good tracking performance
and remarkable reject of disturbances (see “Fig.7 (a)”).
After that the controller were tested under load variation
where the load changes from 50Ω to 80Ω, and from 50Ω
to 30Ω, “Fig.8(a)” shows the ability of the controller to
stabilize the output voltage and returns it to steady state
even when it is effected load variation.
50
40
30
20
10
0
100
200
300
400
500
600
400
500
600
400
500
600
(a)
100
80
60
40
20
0
100
200
300
(b)
0.8
0.6
0.4
0.2
0
0
100
200
300
(c)
Figure 8. (a) System response with disturbance reject (b) Reference
steps variation (c) Reference Model
V.
CONCLUSION
Figure 6. correlation of identification error
50
40
30
20
10
0
100
200
300
400
500
600
(a)
100
In this paper, the application of adaptive control
techniques was analyzed in detail with respect to
Buck-boost converter. The control law design is based
on the pole placement strategy; one used an on-line
adaptive controller which periodically updates the
converter parameters with simultaneous elaboration of
the control law. The applicability of the proposed
method has been verified by simulation, it shows an
interesting tracking and robustness performance
against load disturbance, and parameters uncertainty.
A practical realization with DSP is envisaged soon.
80
REFERENCES
60
[1]
40
20
0
100
200
300
400
500
600
[2]
(b)
0.8
[3]
0.6
0.4
0.2
[4]
0
0
100
200
300
400
500
600
(c)
[5]
[6]
Figure 7. (a) output voltage (b) load variation (c) command u(t)
[7]
L. Ljung. “System identification. Theory for the user”. PTR
Prentice Hall Information and System Sciences Series. T.
Kailath, Series Editor, Upper Saddle River, 2nd edition, 1999.
N. Mohan, T. Undeland, W. Robbins. “Power Electronics,
Converter, Applications and Design”, Willey, New York,
1989.
VORPERIAN V., "Simplified Analysis of PWM Converters
Using Model of PWM Switch ", Part I: “Continuous
Conduction Mode", I.E.E.E Transactions on Aerospace and
Electronics systems, vo126, N°3, M.AY 1990.
Tuffs,P.S and Clarke,D.W “Sellf-tuning Control of Offset: A
Unified Approach”: OUEL Report 1539, 1984
Landau.I,D Identification et commande des systèmes ; 2ed
Edition, Hermes. 1993, pp 160-171
R.Benabdenour, P.Borne, M.Ksouri, F.Msalhi “Identification
et Commande Numérique des procédés industriels”. Edition
TECHNIP2001.
S.El beid, S.Doubabi, M.Chaoui, “Indirect Adaptive Control
of Switched Power Converters” , 2nd Inter. Conf. On
Modeling Simulation and Applied Optimisation ICMSAO’07,
Abu Dhabi UAE, March 2007.