RC Time Constant notes
advertisement

25.108 Intro to Engineering for
ECE
RC Time Constants and Measuring Rotation
Week 11 Announcements
• Advising is underway
– Go See your advisor
– Think about Summer Classes
– Register Early to make sure you have a place
in popular classes
– Think about your schedule from now until
graduation
Chapter 5 Objectives:
• Learn how to read the value of a variable
resistor (potentiometer)
• Calculate and measure the RC time
constant of a circuit
Before Lab
• Read WAM Chapter 5
• Review Lab
Variable Control
Schematic for Variable
resistor (potentiometer)
Potentiometer as a voltage
divider
Vo=Vdd*R/Rtotal
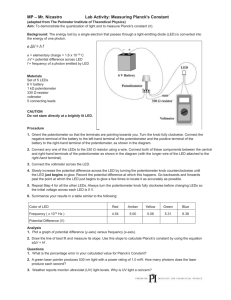
Threshold Control Using A
Potentiometer
Adjust potentiometer until LED goes on. This will occur when
the voltage approaches 1.4 volts, the firing voltage of the LED
Introducing R-C Time Constant
R-C Time Charging (cont’d)
R=resistance in Ohms
C=capacitance in Farads
Build RC circuit shown below
Dial Circuit Parts
Resistor – 220 Ω
(red-red-brown)
(1) Capacitor – 0.1 μF
P7
220 Ω
nc
X
(1)
Pot
10 kΩ
104
0.1 µF
(2) Jumper wires
(1) Potentiometer – 10 kΩ
A
+
+
A
W
10 kΩ
Pot
W
B
B
Vss
0.1 µF
First Build a Circuit With Fixed
R
1+ lead here, 1‐
lead to ground
Chapter #5: Measuring Rotation
√ Run ReadPotWithRcTime.bs2
Use your digital Oscilloscope to measure the rise
and decay times for 4 different R values
Excerpt from:
ReadPotWithRcTime.bs2
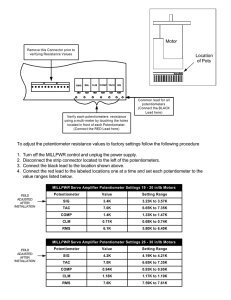
√ Your course guide will explain how to adjust
the example program so that it works best with
the pulsout command and gives your servo a
range of motion that uses the potentiometer’s
entire range of motion.
ControlServoWithPot.bs2
' {$STAMP BS2}
' {$PBASIC 2.5}
time
VAR
Word
DO
HIGH 7
PAUSE 10
RCTIME 7, 1, time
HIGH 7
PAUSE 100
RCTIME 7, 1, time
time = time + 330
PULSOUT 14, time
LOOP
Excerpt from page 151-156
Now Repeat with the potentiometer
instead of fixed resistors
Dial Circuit Parts
(1)
Resistor – 220 Ω
(red-red-brown)
(1) Capacitor – 0.1 μF
Dial Circuit
Vin
104
X3
220 Ω
nc
X
P7
0.1 µF
(2) Jumper wires
(1) Potentiometer – 10 kΩ
Pot
10 kΩ
A
+
+
A
W
B
10 kΩ
Pot
Vss
W
B
Excerpts from pages 149-156
0.1 µF
P15
P14
P13
P12
P11
P10
P9
P8
P7
P6
P5
P4
P3
P2
P1
P0
X2
Vss
Chapter #5: Measuring Rotation
√ Run ReadPotWithRcTime.bs2
Use your digital Oscilloscope to measure the rise
and decay times for 4 different R values
Excerpt from:
ReadPotWithRcTime.bs2
√ Your course guide will explain how to adjust
the example program so that it works best with
the pulsout command and gives your servo a
range of motion that uses the potentiometer’s
entire range of motion.
ControlServoWithPot.bs2
' {$STAMP BS2}
' {$PBASIC 2.5}
time
VAR
Word
DO
HIGH 7
PAUSE 10
RCTIME 7, 1, time
HIGH 7
PAUSE 100
RCTIME 7, 1, time
time = time + 330
PULSOUT 14, time
LOOP
Excerpt from page 151-156
Now Hook up your servo from last
week and control it via the
potentiometer
220 Ω
nc
X
P7
' {$STAMP BS2}
' {$PBASIC 2.5}
Pot
10 kΩ
0.1 µF
time
VAR
Word
DO
Vss
HIGH 7
PAUSE 10
RCTIME 7, 1, time
time = time + 330
PULSOUT 14, time
LOOP
End of Notes