Advances in Colloid and Interface Science 139 (2008) 83 – 96
www.elsevier.com/locate/cis
Hydrodynamic permeability of membranes built up by particles
covered by porous shells: Cell models
S.I. Vasin a , A.N. Filippov a , V.M. Starov b,⁎
a
Department of Pure and Applied Mathematics, Moscow State University of Food Production, Volocolamskoye shosse 11, Moscow, 125080, Russia
b
Department of Chemical Engineering, Loughborough University, Loughborough, Leicestershire, LE11 3TU, UK
Available online 26 January 2008
Abstract
A review is presented on an application of a cell method for investigations of hydrodynamic permeability of porous/dispersed media and
membranes. Based on the cell method, a hydrodynamic permeability is calculated of a porous layer/membrane built up by solid particles with a
porous shell and non-porous impermeable interior. Four known boundary conditions on the outer cell boundary are considered and compared:
Happel's, Kuvabara's, Kvashnin's and Cunningham's (usually referred to as Mehta–Morse's condition). For description of a flow inside the
porous shell Brinkman's equations are used. A flow around an isolated spherical particle with a porous shell is considered and a number of
limiting cases are shown. These are compared with the corresponding results obtained earlier.
© 2008 Elsevier B.V. All rights reserved.
Keywords: Permeability; Porous shell; Membranes; Porous media
1. Introduction
Most particles in nature do not have a smooth homogeneous
surface but have a rough surface or a surface covered with a
porous shell. The roughness of the surface can be modeled by a
thin porous shell. Investigations of flow in concentrated
disperse systems, built up by porous particles or particles
covered with a porous shell, are important for both natural and
industrial processes. The most important examples of such
processes are underground flows of oil and water, filtration of
water through soils and rocks, filtration of various solutions
through porous membranes or filters and so on [1,2]. Flow in
porous media can be successfully modeled using a cell model
described in Ref. [3]. Currently the cell model is one of the most
effective tools for investigation flows in porous media,
concentrated dispersions and membranes [4]. The cell method
has been successfully used for investigation of electrokinetic
phenomena in concentrated dispersions [4].
⁎ Corresponding author.
E-mail addresses: vasin@mgupp.ru (S.I. Vasin), a.filippov@mtu-net.ru
(A.N. Filippov), v.m.starov@lboro.ac.uk (V.M. Starov).
0001-8686/$ - see front matter © 2008 Elsevier B.V. All rights reserved.
doi:10.1016/j.cis.2008.01.005
The essence of the cell method is as follows: the system of
particles which re-chaotically distributed in space is replaced by
a periodic array of spheres imbedded in identical spherical
liquid cells. The major problem of the cell method is the
formulation of the boundary conditions on the outer surface of a
cell. These boundary conditions determine the influence of
surrounding particles on the particle in the centre of the cell.
The presence of porous shells on solid surfaces substantially
modifies both hydrodynamic [5–7] and electrokinetic [8–12]
phenomena. Hydrodynamic interaction of two particles covered
by a porous shell is substantially different from that of nonporous particles [5–7]. From now on we refer to any dispersed
or porous media as “a membrane” for abbreviation.
The presence of a porous shell on the particle surfaces
introduces a new internal degree of freedom in the membrane
performance. In the course of filtration of a liquid solution
through the membrane the structure of the membrane can
undergo a substantial change. The latter can be caused by either
partial dissolution of the particle or fibre surfaces [8], which
build the membrane, or by adsorption of polymers on the same
surfaces (“poisoning”) [13]. As a result a porous shell (or gellayer) forms on the particle's surface, which is usually difficult
to remove [13]. In the case of partial dissolution of the particle
84
S.I. Vasin et al. / Advances in Colloid and Interface Science 139 (2008) 83–96
surfaces, the membrane hydrodynamic permeability increases
because of the increase of the total porosity, however, the
selectivity decreases. In the case of polymer adsorption just the
opposite occurs: the total porosity decreases and the hydrodynamic permeability decreases, while the selectivity increases
as a rule. The presence of porous shells on the particle surface
always alters a hydrodynamic drag force exerted to the particle
by the flowing liquid [5–7,14–17]. The presence of a porous
shell results in a modification of a diffusion coefficient inside
the membrane [17,18] and the overall hydrodynamic permeability [19]. Hydrodynamic effects caused by the presence
of adsorbed polymers on the particle surface were considered
in Refs. [13,18,20], where the thickness of a polymer shells
was assumed much smaller as compared with the particle
radius.
Special cases of the problem under consideration were
investigated earlier in Refs. [21–25]. The flow around and
inside a completely porous particle was considered in Refs.
[21,22] using the cell model. The exact analytical expression
was deduced for the hydrodynamic permeability of a membrane
built up by such particles and various limiting and special cases
were considered [21,22]. Hydrodynamic permeability of
particles covered by a porous shell was investigated in Ref.
[23]. In Refs. [21–23] the Mehta–Morse boundary condition
was used. In Ref. [24] the problem was solved on a motion of an
isolated particle covered by a porous shell in an unbounded
liquid, viscosities of outer and inner liquid were assumed to be
different.
Note, that the cell method is now frequently used as first step
in a new version of a mean field approximation [26,27].
The aim of this review is to investigate, in the framework of
different cell models, a flow around a particle with a porous
shell and to calculate a hydrodynamic permeability of the
porous media build up by such particles. Different boundary
conditions on the outer surface of cells are considered.
2. Statement of the problem
According to the cell model [3] we will model a dispersed
system (membrane) by a periodic net of identical solid
particles of radius R̃ each of them is covered by a porous shell
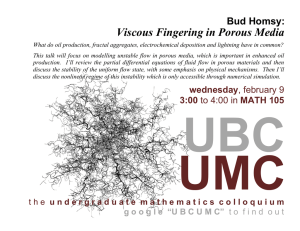
of thickness δ̃ (Fig. 1). It is assumed also that each particle
with a porous shell is located in the centre of a spherical
cell of radius b̃. The spherical cell radius is calculated in the
following way: the volume fraction of the particles in the
Fig. 1. Spherical cell of radius b̃ with a solid particle of radius R̃ covered by a
porous shell of thickness δ̃ in the centre. Ũ is the velocity of the uniform flow;
ṽro, ṽθo are radial and angular velocities on the outer cell surface.
cell, γ3, should be equal to the volume fraction in the real
membrane (Fig. 1):
3
ã
1 e ¼ g3 ¼
;
ð1Þ
b̃
where ɛ is an outer porosity of the membrane, and ã= R̃+ δ̃ is
the total radius of the particle.
Let us introduce a spherical co-ordinate system (r̃, θ, φ) with
the origin located in the particle centre and additional axes z̃,
directed along a uniform flow with velocity Ũ (|Ũ| = Ũ ) on the
boundary of the cell (Fig. 1).
The liquid flows at a low Reynolds number inside the cell but
outside the porous shell (ã≤ r̃≤ b̃) the flow is described by
Stokes equations with the continuity condition:
˜ p̃o ¼ ÃoD˜ ṽo ;
∇
˜ ṽo ¼ 0;
∇
g
ð2Þ
:
Inside the porous shell (R̃≤ r̃≤ ã) the flow is described by
Brinkman's equations and the continuity condition [3]:
i ˜ i
i
˜ i
∇ p̃ ¼ Ã D ṽ k̃ ṽ ;
˜ ṽi ¼ 0;
∇
g
ð3Þ
where ∼ over a symbol marks dimensional values; о and i are
superscripts, which mark flow in the cell (ã≤ r̃≤ b̃) and in the
porous shell (R̃≤ r̃≤ ã), respectively; μ̃ o, μ̃ i are viscosities in
the corresponding zones; p̃ o, p̃ i and ṽ o, ṽ i are pressures and
velocity vectors in the corresponding zones; k̃ is the hydrodynamic resistance of the porous shell, which is inversely
proportional to the hydrodynamic permeability.
Brinkman's equations (3) mean that the flow in a real porous
shell is replaced by the flow of an effective liquid with the
effective viscosity μ̃ i and the friction between the liquid and the
porous skeleton is effectively represented by the friction force
with the friction coefficient k̃. The dependency of μ̃ i and k̃ on
the local porosity of the shell were considered in Refs. [26,27].
In Ref. [16] the problem of a flow around a particle covered
by a porous shell was considered. The flow inside the porous
shell was described using Brinkman's equations. However, it
was assumed that the effective viscosity of the liquid inside the
porous shell was equal to the liquid viscosity outside the shell
μ̃ o = μ̃ i. This assumption allows a substantial simplification of
all calculations. It has been shown however, that these
viscosities are always different [26,27] and the inner effective
viscosity is always higher than the real liquid viscosity.
However, if the porosity inside the porous shell is very low
the deviation of the effective viscosity from the viscosity of the
real liquid tends to zero, hence, μ̃ i → μ̃ o. That is, the solution
presented in Ref. [16] though valid from the mathematical point
of view, can be applied only in the case of low porosity of the
shell. It is the reason why in Refs. [21–25] different viscosities
inside the porous shell and in the surrounding liquid were used.
Note, Einstein equations result in
Ãi = Ão ¼ 1 þ 5u=2;
ð4Þ
S.I. Vasin et al. / Advances in Colloid and Interface Science 139 (2008) 83–96
where φ is the volume fraction of solid material inside the shell.
In Refs. [26,27] the following dependency for the effective
viscosity was deduced:
i
1
o
à = à ¼ 1 uui3
2:5Ai ;
ð5Þ
where Ai and φi are determined by an internal porosity and
structure of the porous shell. The latter equation shows that the
internal effective viscosity is always bigger than the real liquid
viscosity and tends to the real liquid viscosity if the volume
fraction of solid material inside the shell tends to zero.
Taking that into account we consider below the case when
viscosities inside the porous shell and in the liquid differ. We
will discuss the consequences of this assumption.
In order to finalize the boundary value problem for Eqs. (2)
and (3) we should impose appropriate boundary conditions. No
slip boundary conditions are imposed on the surface of the solid
kernel of the particle:
ṽi ¼ 0; r̃ ¼ R̃:
ð6Þ
On the boundary between the porous shell and the liquid,
r̃ = ã, we assume continuity of velocity, tangential σ̃rθ and
normal σ̃rr components of the viscous stress [11,12]:
ṽ o ¼ ṽi ;
r̃orr ¼ r̃irr ;
r̃orh ¼ r̃irh :
ð7Þ
The physical background behind these boundary conditions
(7) is discussed in Refs. [11,12].
Special attention is usually paid to the boundary conditions on
the outer cell boundary, r̃ = b̃. There are four frequently used
versions of those boundary conditions [3], which are referred
below as Happel's, Kuvabara's, Kvashnin's and Mehta–Morse's
models. All four models assume continuity of the radial component of the liquid velocity on the outer cell surface (r̃ = b̃):
ṽ or ¼ Ũ cos h:
ð8Þ
Let us consider an additional condition used in each of the
mentioned models. According to Happel's model [3] the
tangential viscous stress vanishes on the cell boundary (r̃ = b̃):
r̃ orh ¼ 0:
ð9аÞ
According to Kuvabara's model [3] the curl vanishes on the
cell boundary (r̃ = b̃), that is the flow is assumed to be a potential
one:
o
rot ðṽ Þ ¼ 0:
ð9bÞ
According to Kvashnin's model [3] a symmetry condition is
introduced as follows:
Aṽ oh
¼ 0; r̃ ¼ b̃:
Ar̃
ð9cÞ
85
Mehta–Morse's model [3] assumes a homogeneity of the
flow on the cell boundary (r̃ = b̃):
ṽoh ¼ Ũ sin h:
ð9dÞ
There are no decisive arguments in the literature to favour
any of the four models. Even worse than that: in the case of a
flow in flat chamber (which is the limiting case of a cell of an
infinite radius) in the centre of the chamber (which corresponds
to the boundary of the cell) all four mentioned boundary
conditions are satisfied [3]. It is the reason why we consider and
compare below all four models.
3. Method of solution
By using the following dimensionless variables
r̃
b̃ 1
˜ ã; D ¼ D˜ ã2 ; d ¼ d̃;
¼ ; r ¼ ; ∇ ¼∇
ð10Þ
ã
ã
ã g
ṽ
p̃
R̃
Ũ Ão
R ¼ ¼ 1 d; v ¼ ; p ¼ ; p̃0 ¼
;
p̃0
ã
ã
Ũ
Ãi
ã
s0
m ¼ o ; s0 ¼ ; s ¼ pffiffiffiffi
m;
Ã
R̃b
qffiffiffiffio
where R̃b ¼ Ãk̃ is the Brinkman's length, which is a
characteristic depth of penetration of the flow inside the porous
shell. The system of governing equations (Eqs. (2) and (3)) in
dimensionless form become:
1
∇po ¼ Dvo ;
1
V
r
V
;
ð11Þ
∇ vo ¼ 0;
g
∇pi ¼ mDvi s20 vi ;
ð R V r V1Þ:
∇ vi ¼ 0;
ð12Þ
Using the spherical co-ordinate system Eqs. (11) and (12)
take the following form outside the porous shell:
Apo A2 vor
1 A2 vo 2 Avor ctgh Avor
2 Avo
¼ 2 þ 2 2r þ
þ 2
2 h
r Ah
r Ar
r Ah r Ah
Ar
Ar
ð13Þ
2vo 2ctgh
2r 2 voh ;
r
r
vo
1 Apo A2 voh 1 A2 voh 2 Avoh ctgh Avoh 2 Avoh
¼
þ 2
þ 2
2 h ;
þ 2 2 þ
2
r Ah
r Ah
r Ar
r Ah r Ah r sin h
Ar
ð14Þ
Avor 1 Avoh 2vor ctgh o
v ¼ 0;
þ
þ
þ
r Ah
r h
Ar
r
ð15Þ
inside the porous shell (the Brinkman's equations):
ð
Api
A2 vir 1 A2 vir 2 Avir ctgh Avir 2 Avih 2vir
¼m
þ 2
2
þ
þ
r Ah r2 Ah
Ar
Ar2 r2 Ah2 r Ar
r
2ctgh
2 vih s20 vir ;
ð16Þ
r
Þ
86
S.I. Vasin et al. / Advances in Colloid and Interface Science 139 (2008) 83–96
ð
A2 vih 1 A2 vih 2 Avih ctgh Avih 2 Avih
1 Api
¼m
þ 2
þ
þ
þ
r Ah
r Ah r2 Ah
Ar2 r2 Ah2 r Ar
vi
2 h
s20 vih ;
r sin h
Þ
Avir 1 Avih 2vir ctgh i
v ¼ 0:
þ
þ
þ
r h
Ar r Ah
r
ð17Þ
ð18Þ
Boundary conditions (6)–(9) in dimensionless form using
the spherical co-ordinate system become:
vir ¼ 0; vih ¼ 0 at r ¼ R;
vor
¼
vir ;
voh
¼
ð19Þ
g
vih ;
Avor
Avi
¼ pi þ 2m r ;
Ar
Ari
at r ¼ 1;
1 Avor Avoh voh
1 Avr Avih vih
þ
¼m
þ
:
r Ah
r Ah
Ar
r
Ar
r
po þ 2
df o 2ð f o þ Uo Þ
¼ 0;
þ
r
dr
d2 f i 2 df i 4 f i þ Ui
dwi
2 i
;
þ
s
f
¼
r2
dr2 r dr
dr
d2 Ui 2 dUi 2 f i þ Ui
wi
þ
s2 U i ¼ ;
2
2
r dr
dr
r
r
df i 2 f i þ Ui
¼ 0:
þ
r
dr
vor ¼ cos h; at r ¼ 1=g:
1 Avor Avoh voh
þ
¼ 0; at r ¼ 1=g:
r Ah
Ar
r
ð29Þ
ð30Þ
r df o
f o:
2 dr
ð31Þ
Substitution of Eq. (31) into Eq. (26) results in:
ð20Þ
1 d3 f o
d2 f o
df o
wo ¼ r2 3 þ 3r 2 þ 3
:
2 dr
dr
dr
ð22aÞ
ð28Þ
Let us solve Eqs. (25)–(27). From Eq. (27) we conclude:
Uo ¼ ð21Þ
ð27Þ
ð32Þ
Substitution of expressions (31)–(32) in Eq. (25) gives an
Euler's equation to determine the unknown function f o(r):
r3
3 o
d4 f o
d2 f o
df o
2d f
¼ 0:
þ
8r
þ
8r
8
dr4
dr3
dr2
dr
ð33Þ
ð22bÞ
We try solving Eq. (33) using a solution in the following
form f o = const rn, where n is the exponent to be determined.
This procedure gives four different exponent n: n1 = 0, n2 = 2,
n3 = − 1, n4 = − 3. Hence, the general solution of Eq. (33) f o is:
Avoh
¼ 0; at r ¼ 1=g:
Ar
ð22cÞ
f o ðr Þ ¼
voh ¼ sin h; at r ¼ 1=g:
ð22dÞ
where b1, b2, b3 and b4 are integration constants.
Substitution of Eq. (34) into Eqs. (31) and (32) allows the
determination of the unknown functions Φo, ψo:
1 Avor
r Ah
þ
Avoh
Ar
þ
voh
r
¼ 0; at r ¼ 1=g:
b1 b2
þ þ b3 þ b4 r 2 ;
r3
r
ð34Þ
The liquid flow is axi-symmetric, taking this into account we
will try the solution of the problems (13)–(15) and (16)–(18) as
a first order spherical harmonics [3]:
Uo ¼
b1 b2
b3 2b4 r2 ;
2r3 2r
ð35Þ
vor ¼ f o ðrÞ cos h; voh ¼ Uo ðrÞ sin h; po ¼ wo ðrÞ cos h;
ð23Þ
wo ¼
b2
þ 10b4 r:
r2
ð36Þ
vir ¼ f i ðrÞ cos h; vih ¼ Ui ðrÞ sin h; pi ¼ mwi ðrÞ cos h:
ð24Þ
Casting expressions (23) and (24) into Eqs. (13)–(15) and
(16)–(18), respectively, we arrive at a system of interconnected
ordinary differential equations to determine the unknown
functions f o(r), Φo(r), ψo(r), f i(r), Φi(r), ψi(r):
d2 f o 2 df o 4ð f o þ Uo Þ dwo
;
þ
¼
r dr
r2
dr2
dr
d2 Uo 2 dUo 2ð f o þ Uo Þ
wo
;
þ
¼
r dr
r2
dr2
r
ð25Þ
These results (Eqs. (34)–(36)) can be combined with
Eq. (23) to determine expressions for outer velocity distributions as follows:
vor
¼
voh ¼
b1 b2
þ þ b3 þ b4 r 2
r3
r
b1 b2
b3 2b4 r2
2r3 2r
ð26Þ
po ¼
b2
þ 10b4 r
r2
cos h;
ð37Þ
sin h;
ð38Þ
cos h:
ð39Þ
S.I. Vasin et al. / Advances in Colloid and Interface Science 139 (2008) 83–96
The velocity distributions inside the porous shell also need to
be determined. In precisely the same way as for outer flow we
find:
Ui ¼ r df i
f i;
2 dr
1 d3 f i
d2 f i
df i r2 s2 df i
wi ¼ r2 3 þ 3r 2 þ 2
rs2 f i :
2 dr
dr
dr
2 dr
ð40Þ
Going in the reverse direction allows us to deduce:
cosh ðsrÞ
sinh ðsrÞ
f ¼ c1
2 2
r 3 s3
r s
sinh ðsrÞ
cosh ðsrÞ
c3
þ c2
þ 3 þ c4 :
r 2 s2
r 3 s3
r
i
ð41Þ
ð47Þ
Using Eqs. (40) and (41) we get:
Substitution of Eqs. (40) and (41) into Eq. (28) results in an
equation to determine the unknown function f i :
r3
87
3 i
2 i i
d4 f i
2d f
2 3 d f
2 2 df
¼ 0:
þ
8r
þ
8r
s
r
8
þ
4s
r
dr4
dr3
dr2
dr
ð42Þ
i
Introducing a new unknown function, uðrÞu ddfr , allows us to
lower the order of Eq. (42):
cosh ðsrÞ
sinh ðsrÞ sinh ðsrÞ
2r2 s2
2r3 s3
2rs
sinh ðsrÞ
cosh ðsrÞ
cosh ðsrÞ
c3
þ c2
þ 3 c4 ;
2r2 s2
2r3 s3
2rs
2r
Ui ¼ c1
ð48Þ
and
wi ¼ s2
c
3
2r2
rc4 :
ð49Þ
Substitution of Eqs. (47)–(49) into Eq. (24) gives:
du d u
d u 8 þ 4s2 r2 u ¼ 0:
þ 8r2 2 þ 8r s2 r3
3
dr
dr
dr
3
r3
2
ð43Þ
ð44Þ
The order of this equation is lowered using z = y′, we arrive
to Bessel's equation:
r2 zW 4rz Vþ 4 r2 s2 z ¼ 0:
ð45Þ
Solution of Eq. (45) can be expressed via a modified Bessel
function of the first kind of order 3/2. The latter functions are
hyperbolic functions:
r
z ¼ c1 r2 cosh ðsrÞ sinh ðsrÞ
s
r
2
þ c2 r sinh ðsrÞ cosh ðsrÞ :
s
ð46Þ
f
cosh ðsrÞ
sinh ðsrÞ
r 2 s2
r 3 s3
sinh ðsrÞ
cosh ðsrÞ
c3
þc2
þ 3 þ c4 cos h;
r 2 s2
r3 s3
r
We try the solution of Eq. (43) in the following form u ¼ yrð4rÞ,
where y(r) is a new unknown function. Using the latter representation Eq. (43) can be rewritten as:
r2 yj 4ryW þ 4y V yVr2 s2 ¼ 0:
f
vir ¼ c1
vih
ð50Þ
g
cosh ðsrÞ
sinh ðsrÞ
sinh ðsrÞ
¼ c1
2r2 s2
2r3 s3
2rs
sinh ðsrÞ cosh ðsrÞ cosh ðsrÞ
c3
þc2
þ 3 c4 sin h;
2
2
3
3
2r s
2r s
2rs
2r
g
ð51Þ
pi ¼ ms2
c
3
2r2
rc4
cos h:
ð52Þ
Substitution of the general solutions (37)–(39), and (50)–
(52) into boundary conditions (19)–(22) results in a system of
algebraic equations to determine integration constants bj, cj,
j = 1,2,3,4. This system of algebraic equations depends on the
selection of the model used: boundary conditions (22a), (22b),
(22c), or (22d). The solution of the mentioned system results in
expressions, which are so lengthy that they cannot be presented
here.
4. Results and discussion
The main value in which we are interested in, is the hydrodynamic drag force, F̃, exerted to the particle by the flowing liquid.
After substitution of the general expressions for the velocity components (37)–(38) and (50)–(52) we arrive after integration to the
following expression:
F˜ ¼ ∯ðr̃rr cos h r̃rh sin hÞds ¼ 4kb2 ã Ão Ũ ;
ð53Þ
S
where integration is over outer surface of the porous shell and b2 is the constant to be determined from the boundary conditions.
88
S.I. Vasin et al. / Advances in Colloid and Interface Science 139 (2008) 83–96
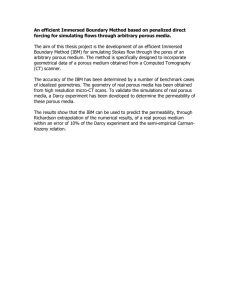
Fig. 2. Variation of the dimensionless hydrodynamic permeability, L11, of a membrane built up by solid particles covered by a porous shell, with the parameter γ
(which is (volume fraction of particles)1/3) at m = 4, s0 = 8, δ = 0.5 for the following models: 1 — Happel, 2 — Kuvabara, 3 — Kvashnin, 4 — Cunningham (Mehta–
Morse).
The hydrodynamic permeability, L̃11, of the membrane, which is one of the coefficients in the Onsager's matrix [3], is determined
as a ratio of the cell flux of the liquid, Ũ, to the cell gradient of pressure, F̃/Ṽ [3,21–23]:
L̃11 ¼
Ũ
F̃= Ṽ
;
ð54Þ
3
where Ṽ ¼ 43 k b̃ is the cell volume.
Substitution of expressions for the hydrodynamic drag force (53) into Eq. (54) allows determining the hydrodynamic permeability as:
L̃ 11 ¼ ã2
1 ã2
2 1 ã2
¼
uL
;
11
o
o
3b2 g3 Ã
9g3 X Ã
Ão
ð55Þ
where
L11 ¼
2 1
1
¼
;
9g3 X 3g3 b2
ð56Þ
is a dimensionless hydrodynamic permeability of the membrane, Ω is the ratio of the hydrodynamic drag force F̃ and the Stokes force
F̃st = 6πãμ̃oU:
X ¼ 2b2 =3:
ð57Þ
The hydrodynamic permeability, L11(δ,γ,m,s0), is paffiffiffiffifunction of four parameters. Parameters δ and γ are geometrical
characteristics of the particles and shells; m and s0 ¼ s m are characteristics of the internal structure of the porous shell. In the
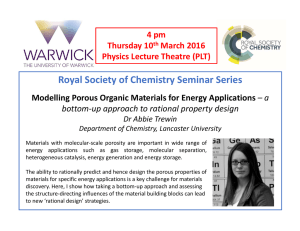
Fig. 3. Variation of the dimensionless hydrodynamic permeability, L11, of a membrane built up by solid particles covered by a porous shell, with the dimensionless
thickness of the porous shell, δ, at m = 1, s0 = 5, γ = 0.3 for the following models: 1 — Happel, 2 — Kuvabara, 3 — Kvashnin, 4 — Cunningham (Mehta–Morse).
S.I. Vasin et al. / Advances in Colloid and Interface Science 139 (2008) 83–96
89
Fig. 4. Variation of the dimensionless hydrodynamic permeability, L11, of a membrane built up by solid particles covered by a porous shell, with the viscosity ratio m at
γ = 0.8, s0 = 5, δ = 0.5 for the following models: 1 — Happel, 2 — Kuvabara, 3 — Kvashnin, 4 — Cunningham (Mehta–Morse).
general form the expressions for the hydrodynamic permeability, L11, are too lengthy and it is the reason why we do not present them
here.
The dependence of the dimensionless hydrodynamic permeability, L11, of a membrane on γ is presented in Fig. 2 for all four
models at δ = 0,5; s0 = 8; m = 4. The maximum value of γ = 0.905 is reached in the case of hexagonal packing of spheres, while for a
simple cubic packing γ = 0.806. Fig. 2 shows that as γ increases, that is as the volume fraction of a solid phase increases, the
hydrodynamic permeability of the membrane decreases. The rate of a decrease of L11 is higher at lower γ values (that is low volume
fraction of particles). As γ → 0 the membrane hydrodynamic permeability increases unboundedly, however, as γ → 1 the membrane
hydrodynamic permeability tends to zero. Fig. 2 shows that the hydrodynamic permeabilities calculated for three of the models
(Happel's, Kuvabara's and Kvashnin's) almost coincide. Calculations based on Mehta–Morse's model, result in a slightly lower
hydrodynamic permeability at higher volume fractions when compared with the other three models.
Fig. 3 shows the variation of the dimensionless hydrodynamic permeability with the dimensionless thickness of the porous shell,
δ, for all four models at γ = 0,3; s0 = 5; m = 1. All the calculated values are increasing functions of the thickness of the shell (as
expected), as the more porous the particles are the higher their hydrodynamic permeability. The calculated hydrodynamic
permeability increases in the following direction from the lowest for Mehta–Morse's model, to Kuvabara's, Kvashnin's and reaches
the highest possible value for Happel's model. The parameter s0 characterises the depth of penetration of the flow inside the porous
shell: the higher the s0 the lower the depth of penetration of the flow inside the porous shell. At high values of s0 the flow only takes
place in a thin shell with the thickness roughly equal to the Brinkman's length rather than in the whole porous shell. That is, when the
thickness of the shell becomes bigger than the Brinkman's length, the hydrodynamic permeability ceases to depend on the thickness
of the porous shell. This is shown by the levelling off of the curves in Fig. 3.
The influence of the viscosity ratio, m, on the dimensionless hydrodynamic permeability, L11, is presented in Fig. 4 for all four
models at γ = 0,8; s0 = 5; δ = 0,5. Fig. 4 shows that the increase of the inner viscosity results in a decrease of the membrane
hydrodynamic permeability, as expected. Fig. 4 shows also that the hydrodynamic permeability decrease sharply in the beginning
and then levels off when the inner viscosity inside the porous shell becomes sufficiently high, that is, the flow inside the porous shell
practically vanishes.
Fig. 5. Variation of the dimensionless hydrodynamic permeability, L11, of a membrane built up by solid particles covered by a porous shell, with the parameter s0 at
m = 1, γ = 0.8, δ = 0.5 for the following models: 1 — Happel, 2 — Kuvabara, 3 — Kvashnin, 4 — Cunningham (Mehta–Morse).
90
S.I. Vasin et al. / Advances in Colloid and Interface Science 139 (2008) 83–96
Fig. 6. Variation of the dimensionless hydrodynamic permeability, L11, of a membrane built up by completely porous particles with the parameter γ (which is (volume
fraction of particles)1/3) at m = 1, s0 = 5 for the following models: 1 — Happel, 2 — Kuvabara, 3 — Kvashnin, 4 — Cunningham (Mehta–Morse).
In Fig. 5 the dependence of the dimensionless hydrodynamic permeability, L11, on the parameter s0 is presented for all four
models at γ = 0,8; m = 1; δ = 0,5. As pointed out before, the dimensionless parameter s0 characterises the depth of penetration of the
flow inside the porous shell. The latter depends on the porosity of the porous shell: the lower the porosity, the higher the value of the
parameter s0 is. As s0 → ∞ the porous shell becomes completely impermeable. Fig. 4 shows that a limiting value of the
hydrodynamic permeability is reached as m increases, however, Fig. 5 does not show that a limiting value is reached as s0 increases
because at higher s0 calculations become unstable. As in Fig. 4 the calculations based on Mehta–Morse's model result in lower
values of the hydrodynamic permeability when compared with the other models.
Note, that the conditions presented here of membranes built up by particles with a porous shell on their surfaces provide a new
additional degree of freedom to control the membrane performance as compared with membranes built up by completely porous
particles in Refs. [21–23], as well as compared with the consideration in Refs. [3,28–30], where the hydrodynamic permeability of
membrane built up by non-porous particles was considered.
The new degree of freedom introduced here allows description of a wider range of phenomena including the process of internal
poisoning and/or dissolution of membranes on their hydrodynamic permeability in the course of filtration.
In the next section important limiting cases of the above theory are considered.
4.1. Completely porous particles
Completely porous particles correspond to the condition of δ = 1. Expressions for the hydrodynamic permeability, L11(γ,m,s), for
the different models take the following forms:
Happel's model:
L11 ¼ f 2g6 3g5 þ 3g 2 m2 s2 x3 þ 18 g5 1 ðx1 2x2 Þ: 3m½2s2 g6 ðx1 2x2 Þ
þg5 x1 s2 þ 4x2 s2 þ 4x1 8x2 þ 4x3 þ 10 2s2 gðx1 2x2 Þ þ x1 s2 4x1 4x2 s2 þ 8x2 þ x3 10gð58Þ
=f3g3 ms2 ½ð6x1 þ 12x2 Þðg5 1Þ þ mx3 ð2g5 þ 3Þg
Kuvabara's model:
L11 ¼ f2ðg6 5g5 þ 9g 5Þm2 s2 x3 90ðx1 2x2 Þ 3m½2s2 g6 ðx1 2x2 Þ þ 5g3 ðx1 s2 þ 4x1 8x2 þ 2x3 þ 10Þ
ð59Þ
12s2 gðx1 2x2 Þ þ 5ðx1 s2 þ 4x2 s2 4x1 þ 8x2 þ x3 10Þg= 45g3 ms2 ð2x1 4x2 þ mx3 Þ :
Kvashnin's model:
L11 ¼ fm2 s2 x3 ðg 1Þ3 8g3 þ 15g2 þ 21g þ 16 þ 18 3g5 8 ðx1 2x2 Þ
3m½8s2 g6 ðx1 2x2 Þ 3g5 x1 s2 4x2 s2 4x1 þ 8x2 4x3 10 þ 5g3 x1 s2 þ 4x1 8x2 þ 2x3 þ 10
ð60Þ
18s2 gðx1 2x2 Þ þ 8 x1 s2 4x2 s2 4x1 þ 8x2 þ x3 10 g
= 18g3 ms2 8 3g5 x1 þ 6g5 16 x2 þ mx3 g5 þ 4 ;
S.I. Vasin et al. / Advances in Colloid and Interface Science 139 (2008) 83–96
91
and for Mehta–Morse's model:
L11 ¼ fm2 s2 x3 ðg 1Þ4 4g2 þ 7g þ 4 þ 18 3g5 þ 2 ðx1 2x2 Þ 3m½4s2 g6 ðx1 2x2 Þ 3g5 x1 s2 4x2 s2 4x1 þ 8x2 4x3 10
5g3 x1 s2 þ 4x1 8x2 þ 2x3 þ 10 þ 6s2 gðx1 2x2 Þ 2 x1 s2 4x2 s2 4x1 þ 8x2 þ x3 10 g
ð61Þ
= 18g3 ms2 3g5 þ 2 x1 þ 6g5 þ 4 x2 þ mx3 g5 1 ;
where ω1, ω2, ω3 are
cosh ðsÞ
sinh ðsÞ
1
x1 ¼ 30
2 ;
s4
s5
3s
15 cosh ðsÞ
sinh ðsÞ 2
2
1þs þ 2 ;
x2 ¼ 2
s4
s5
3s
2
cosh ðsÞ
s
sinh ðsÞ
s2
1þ
1þ
:
x3 ¼ 90
s4
s5
6
2
ð62Þ
Note, that in the limiting case when s → 0, which corresponds to the absence of the solid core in the particle centre results in
lim x1 ¼ lim x2 ¼ 1; lim x3 ¼ 3:
sY0
sY0
sY0
ð63Þ
In this case Ω → 0 and the hydrodynamic drag force disappears, which is as it should be in the case of complete mixing of liquids.
As we already noted before, the case μ̃ i b μ̃ o is not realistic from the physical point of view [26,27]. However the case μ̃ i ≪ μ̃ o and
m → 0 can be easily investigated using Eqs. (58)–(61) from the mathematical point of view. The latter limit gives the following
expressions for hydrodynamic permeability:
Happel's model:
1
1
1
L11 ¼ 3 2 þ 3 2 :
ð64Þ
3g
3g
g s0
Kuvabara's model:
L11 ¼
1
2
g3
1
2þ þ 3 2:
3
3g
5g
15 g s0
Kvashnin's model:
1
4
5
1
L11 ¼ 3 2 þ 2
þ 3 2:
5
3g
9g
9g ð8 3g Þ g s0
ð65Þ
ð66Þ
Mehta–Morse's model:
L11 ¼
1
3 þ 2g5
1
þ 3 2:
3
2
5
3g
g ð6 þ 9g Þ g s0
ð67Þ
The variation of the dimensionless hydrodynamic permeability, L11, with the parameter γ calculated according to Eqs. (58)–(61)
(that is for a completely porous particles) is presented in Fig. 6 at m = 1; s0 = 5. For all models the hydrodynamic permeability
Fig. 7. Variation of the dimensionless hydrodynamic permeability, L11, of a membrane built up by non-porous solid particles with the parameter γ (which is (volume
fraction of particles)1/3) for the following models: 1 — Happel, 2 — Kuvabara, 3 — Kvashnin, 4 — Cunningham (Mehta–Morse).
92
S.I. Vasin et al. / Advances in Colloid and Interface Science 139 (2008) 83–96
decreases with volume fraction of particles. Note, the difference between different models in this special case of completely porous
particles is less pronounced than in the general case of particles covered by a porous shell.
4.2. Solid non-porous particles
When δ = 0, or s → ∞, we arrive at a membrane built up by solid non-porous particles. Expressions for the dimensionless
hydrodynamic permeability, L11(γ), for the different models take the following forms:
Happel's model:
L11 ¼
2g6 þ 3g5 3g þ 2
;
6g8 þ 9g3
ð68Þ
which coincides with the corresponding expression in Ref. [3];
Kuvabara's model:
L11 ¼
2ðg6 5g3 þ 9g 5Þ
;
45g3
ð69Þ
which coincides with the expression deduced in Ref. [3];
Kvashnin's model:
L11 ¼
ðg 1Þ3 ð8g3 þ 15g2 þ 21g þ 16Þ
;
18g3 ðg5 þ 4Þ
ð70Þ
which coincides with the expression in Ref. [29];
Mehta–Morse's model:
L11 ¼
ð1 gÞ3 ð4g2 þ 7g þ 4Þ
;
18g3 ðg4 þ g3 þ g2 þ g þ 1Þ
ð71Þ
which was deduced by Cunningham. It is necessary to mention here that the boundary condition (9d), to which we usually refer as the
Mehta and Morse one, following to J. Happel and H. Brenner [3], for the first time, was proposed by Cunningham in 1910 [30].
Mehta and Morse only used Cunningham's condition in their analysis [31], which has an error. We corrected that error and it is the
reason why Eq. (71) differs from that of the Mehta and Morse [31].
The semi-empirical Kozeny–Carman equation [3] gives the following expression for the hydrodynamic permeability of solid
particles:
3
L11 ¼
ð 1 g3 Þ
:
45g6
ð72Þ
The variation of the hydrodynamic permeability for the different models with the parameter γ is presented in Fig. 7. These results
are calculated according to Eqs. (68)–(72). This figure shows that the dependencies calculated for all four cell models are very close
to each other (although the calculations according to the Mehta–Morse's model give slightly lower hydrodynamic permeability
values at high volume fractions when compared with the other models). The calculations based on the semi-empirical Kozeny–
Carman model, give a higher hydrodynamic permeability when compared with the cell models. The latter deviation is very
substantial at low volume fractions but decreases and almost disappears at high volume fractions.
4.3. Uniform flow around an isolated particle
Let us consider a particle covered by a porous shell placed in a uniform flow. The solution to this problem is obtained using Eqs.
(37)–(39) and (50)–(52) at γ = 0. Note, that all four boundary conditions (22а), (22b), (22с), and (22d) are satisfied and all four
models give identical results (see Fig. 2). This observation shows that all four models work equally well at low volume fractions of
solid particles.
A change of the hydrodynamic permeability caused by the presence of a porous shell on the surface of particles in some cases can
be effectively described using an “effective hydrodynamic thickness”, L̃h [3]. This is determined as an additional thickness of a nonporous shell, the presence of which on the particle surface produces identical hydrodynamic drag force exerted to particle with bigger
radius, which is caused by the presence of the porous shell. The value of L̃h is a measurable experimental parameter and it is used to
S.I. Vasin et al. / Advances in Colloid and Interface Science 139 (2008) 83–96
93
characterise the effective thickness of the porous shell. To determine the effective thickness of the porous shell the Stokes equation
for the hydrodynamic drag force exerted to the solid particle of radius R̃ without a porous shell, which moves with a velocity Ũ
F̃ solid ¼ 6k Ão R̃ Ũ
ð73Þ
is used.
After adsorption of a polymer and formation of a porous shell on the particle surface the hydrodynamic drag force exerted to the
particle will increase. The effective hydrodynamic thickness, L̃h, is determined by the effective increase of the particle radius to
accommodate the corresponding increase in the hydrodynamic drag force:
F̃ ¼ 6k Ão R̃ þ L˜h Ũ :
ð74Þ
Using dimensionless values we can conclude from the previous equation that:
Lh ¼ X R
ð75Þ
where Lh = L̃h / ã, R = R̃/ ã and Ω = F̃/ F̃st is the dimensionless effective hydrodynamic thickness of the porous shell, dimensionless
radius of the solid particle and the ratio of hydrodynamic drag forces, Ω, should be calculated according to Eq. (57).
After rather lengthy algebraic calculations the expression for the ratio of the hydrodynamic drag forces, Ω, takes the following
form in the case of calculations [22,25]:
X¼1
m½6sR ð3sR2 þ 3sÞ cosh ðsdÞ ð 3R þ s2 R3 3 þ 2s2 Þ sinh ðsdÞ P
;
3sRmð1 þ mÞ þ 3mð1 s2 R2 mÞ sinh ðsdÞ sm½3 þ mð 3R þ s2 R3 þ 2s2 Þ cosh ðsdÞ þ T
where
P ¼ 18ð1 mÞ
6R
3 3R
3ð1 þ R2 Þ
þ 1 þ 2 2 R3 sinh ðsdÞ cosh ðsdÞ ;
s
s
s
s
3ð 1 m Þ
3R 3R þ s2 R3
3R2
þ
T ¼ 12ð1 mÞ
cosh
ð
sd
Þ
sinh
ð
sd
Þ
þ
2
s
s2
s
2
R 2
9R 3sR3
3sr2
9R
3R s2 R3 s2
þm 7s þ 18 þ
þ
þs
1
cosh ðsdÞ þ
sinh ðsdÞ
4s
2s
4
2
4
2
4
2
9
9 þ 3s2
9R
cosh ðsdÞ sinh ðsdÞ þ
2s
2s
2s2
ð76Þ
ð77Þ
f
ð78Þ
g
At m = 1 (the case of equal viscosities μ̃i = μ̃o) the expression for the dimensionless hydrodynamic drag force ratio Ω takes the
following simple form:
X¼1
6sR ð3sR2 þ 3sÞ cosh ðsdÞ ð 3R þ s2 R3 3 þ 2s2 Þ sinh ðsdÞ
:
6sR þ 3ð1 s2 R2 Þ sinh ðsdÞ ð3s þ 3Rs þ s3 R3 þ 2s3 Þ cosh ðsdÞ
ð79Þ
In this particular case the effective hydrodynamic thickness of the porous shell, Lh, is equal to
Lh ¼ X R ¼ X þ d 1:
ð80Þ
In the general case an expression for Lh can be obtained using Eqs. (75)–(77), however, we do not present it here because it is too big.
Note, in Ref. [16] the problem was solved in the case of equal viscosities μ̃i = μ̃o (m = 1). However, the authors [16] did not deduce
the explicit Eq. (79) for the dimensionless ratio of hydrodynamic drag force. They calculated this ratio numerically using a chain of
equations. Unfortunately these kinds of calculations result in an instability of the numerical procedure as noticed in Ref. [16], which
we also found. It was the reason why we adopted a general approach, which allowed us to deduce Eq. (79) for the dimensionless ratio
of the hydrodynamic force ratio. Note, there are no instabilities in the calculations using Eqs. (76) or (79).
4.4. Influence of a porous shell on the motion of a particle
In this section we consider some limiting cases of the dimensionless ratio of the hydrodynamic drag force exerted to the particles
according to Eq. (76). The cases we will consider here are:
1. No porous shell, that is δ = 0, R = 1. Using Eq. (76) we conclude: Ω = 1, that is the hydrodynamic drag force is equal to the Stokes
force as expected.
94
S.I. Vasin et al. / Advances in Colloid and Interface Science 139 (2008) 83–96
2. Infinite hydrodynamic resistance of the porous shell, that is s → ∞. According to Eq. (76) we conclude Ω = 1, that is the Stokes
force is recovered again as expected.
3. Completely porous particle, that is (R = 0, δ = 1). From Eq. (76) or directly from Eqs. (58)–(61) we can show that:
9
1
þ
X¼ 1þ
2ms2 2ð1 mÞ m=Q
1
;
ð81Þ
where
Q¼1þ
3
tanh s 1
1
:
s2
s
ð82Þ
In the case of equal viscosities, μ̃ i = μ̃ o, (m = 1) and using Eq. (81) the following expression for the dimensionless hydrodynamic
drag force ratio is deduced:
"
#1
tanh s 1 3
X¼
1
þ 2
;
ð83Þ
s
2s
which coincides with expressions earlier obtained in Refs. [16,21–23,25,32].
4. If the internal viscosity is much bigger than the external viscosity, that is at m → ∞ then we arrive to the same case as that of a solid
impermeable particle and from Eq. (76) we conclude that Ω = 1.
5. At m = 0 from Eq. (76) or at γ = 0 from Eqs. (64)–(67) we conclude:
X¼
2s20
:
3s20 þ 9
ð84Þ
In Fig. 8 the variation of the dimensionless hydrodynamic drag force ratio Ω is the ratio of the calculated drag force exerted to a
particle with a porous shell to the Stokes force exerted to the particle of the same radius. Those dependencies presented in Fig. 8 are
given on the dimensionless thickness of the porous shell, δ at various parameters s0 (that means at various permeabilities of the
porous shell). The presence of the porous shell always results in a lower friction and, hence, lower hydrodynamic drag force exerted
to the particle when compared with the Stokes force. The latter means that the following inequality should hold: Ω ≤ 1. Dependencies
presented in Fig. 8 always decrease as the thickness of the porous shell increases. This decrease is more pronounced at low values of
the parameter s0, that is at higher hydrodynamic permeability of the porous shell. At δ = 0 there is no porous shell and in all cases
Ω = 1 as should be. As the thickness of the porous shell increases the hydrodynamic drag force exerted to the particle decreases until
the thickness δ̃ is less than the thickness of the Brinkman's layer, R̃b. As the thickness δ̃ approaches R̃b the rate of decrease is
weakening. As the thickness δ̃ continues to increase (δ̃N R̃b) the liquid flow takes place only in a part of the porous shell, with a
thickness of the order of R̃b. The latter means that in the region of the porous shell R̃≤ r̃≤ R̃+ δ̃− R̃b the liquid is practically immobile.
Hence, the influence of the presence of the porous shell should stabilise as its thickness increases and the hydrodynamic drag force
exerted to the particle should level off. The latter manifests itself by the presence of horizontal parts in dependencies 2, 3 and 4 in
Fig. 8. Variation of the dimensionless drag force Ω (the real drag force divided by the Stokes force exerted to the solid non-porous particles of the same radius) exerted
to solid particles covered by a porous shell with the dimensionless thickness of the porous shell δ at m = 3 and s0 = 2 (1), s0 = 5 (2), s0 = 8 (3), s0 = 11 (4).
S.I. Vasin et al. / Advances in Colloid and Interface Science 139 (2008) 83–96
95
Fig. 9. Variation of the dimensionless hydrodynamic drag force ratio Ω (the real drag force divided by the Stokes force exerted to the solid non-porous particles of the
same radius) exerted to solid particles covered by a porous shell with the parameter s0 at m = 3 and δ = 0.4 (1), δ = 0.6 (2), δ = 0.8 (3), δ = 1 (4).
Fig. 8. The curve 1 in Fig. 8 decreases over the whole range of thicknesses of the porous shell because in this particular case the
Brinkman's length R̃b N δ̃. Note, the authors in Ref. [16] came to a similar conclusion at m = 1. In the same reference [16] the physical
picture of the flow in the porous shell was investigated in detail and stream lines of the flow were presented for a range of other
dimensionless parameters.
The variation of the dimensionless hydrodynamic drag force ratio Ω with the parameter s0 at different δ is presented in Fig. 9.
Increasing s0 corresponds to a decrease of the Brinkman length, R̃b, that is thinning of the part of the porous shell where the liquid
flow takes place (at fixed δ̃ and R̃). Note again, inside the depth of the porous shell outside the Brinkman's layer the liquid is
practically immobile. This was the reason why, according to the limiting case 2 (s → ∞), the hydrodynamic drag force exerted to the
particle tends to the Stokes force for the solid particle of radius R̃+ δ̃ (Ω → 1). Hence, if the same solid shell is replaced by a porous
shell of the same thickness then the drag decreases. The decrease of the hydrodynamic drag force ratio is more pronounced at lower
values of the friction coefficient of the porous shell k̃. The increase of the thickness of the porous shell, δ̃, at high hydrodynamic
permeability (s0 ≤ 1) also contributes to the decrease of the hydrodynamic drag force ratio. Note, in the case of zero friction
coefficient, k̃= 0, s0 = 0 the resulting hydrodynamic drag force is the Stokes force exerted to the solid particle of radius R̃: F̃= 6πμ̃R̃Ũ.
The latter means that at s0 = 0
X¼
R̃
1
:
u
˜
d
þ
1
d þ R̃
ð85Þ
The dimensionless hydrodynamic drag forces ratio Ω is plotted in Fig. 10 against the parameter m at different values of the
dimensionless thickness of the porous shell δ. All plots start from an identical point determined by Eq. (84). In the case under
consideration this point is Ω = 0.5. As the internal viscosity, μ̃i increases, the hydrodynamic drag force should increase according to
the limiting case 4, and Ω → 1 at m → ∞. This limiting value is reached earlier at low thicknesses of the porous shell, δ.
In general the viscosity and the hydrodynamic permeability of the Brinkman's media are not independent parameters but are
interconnected and should be determined according to self-consistent theory [26,27].
Fig. 10. Variation of the dimensionless hydrodynamic drag force ratio Ω (the real drag force divided by the Stokes force exerted to the solid non-porous particles of the
same radius) exerted to solid particles covered by a porous shell with the viscosity ratio m at s0 = 3 and δ = 0.1 (1), δ = 0.37 (2), δ = 0.63 (3), δ = 0.9 (4).
96
S.I. Vasin et al. / Advances in Colloid and Interface Science 139 (2008) 83–96
5. Conclusions
Flow through a layer built up by porous particles is important
in a number of processes both in nature and technology: flows
in sand beds, through porous membranes under applied pressure
difference, in petroleum reservoir rocks, in aloxite materials,
sedimentation etc. [1]. Such flows can be effectively modeled
using the cell model suggested in Ref. [3]. The surveyed above
approach to the description of the structure of membranes has
additional degrees of freedom as compared with a model of
completely porous particles examined in our previous publications [21,22]: the ratio of the thickness of the porous layer to the
radius of the hard core of the particle and the porosity of the
layer. The introduction of additional degrees of freedom allows
modeling the influence of processes of an internal fouling and
(or) dissolution of a membrane on its permeability in the course
of filtration.
Acknowledgements
S. Vasin and A. Filippov research was supported by the
Russian Foundation for Basic Research (grant 06-03-90575БНТС_а). V. Starov acknowledges the support from the
Engineering and Physical Sciences Research Council, UK
(grant EP/C528557/1).
References
[1] Qin Yu, Kaloni PN. Z Angew Math Mech 1993;73:77.
[2] Greenkorn RA. Flow phenomena in porous media: fundamentals and
applications in petroleum, water, and food production. New York: Marcel
Dekker; 1983.
[3] Happel J, Brenner H. Low Reynolds number hydrodynamics with special
applications to particulate media. Prentice-Hall; 1965 (reprinted by
Wolters-Nordhoff, (1973); paperback edition, Martinus Nijhoff; Kluwer
Academic Publishers, (1983)).
[4] Zholkovskij EK, Masliyah JH, Shilov VN, Bhattacharjee S. Adv Colloid
Interface Sci 2007;134­135:279.
[5] Kotov AA, Solomentsev YuE, Starov VM. Prog Colloid & Polym Sci
1991;84:293.
[6] Kotov AA, Solomentsev YuE, Starov VM. Colloid J USSR 1991;53(6):867
(English Translation).
[7] Kotov AA, Solomentsev YuE, Starov VM. Int J Multiph Flow 1992;18(5):739.
[8] Churaev N, Sergeeva I, Derjaguin B. J Colloid Interface Sci 1981;84:451.
[9] Churaev NV, Kotov AA, Solomentsev YuE, Starov VM. Prog Colloid &
Polym Sci 1991;84:290.
[10] Solomentsev YuE, Starov VM. Colloid J Russ Acad Sci 1993;54(4):591
(English Translation).
[11] Starov VM, Solomentsev YuE. J Colloid Interface Sci 1993;158:159.
[12] Starov VM, Solomentsev YuE. J Colloid Interface Sci 1993;158:166.
[13] Varoqui R, Dejardin P. J Chem Phys 1977;66:4395.
[14] Hiller J, Hoffman H. J Comp Physiol 1953;42:203.
[15] Parsons D, Subjeck J. Biochim Biophys Acta 1972;55:440.
[16] Masliyah J, Neale G, Malysa K, Van de Ven T. Chem Eng Sci 1987;42:245.
[17] Garvey M, Tadros Th, Vincent B. J Colloid Interface Sci 1975;55:440.
[18] Pefferkorn E, Dejardin P, Varoqui R. J Colloid Interface Sci 1975;63:353.
[19] Idol WK, Anderson JL. J Membr Sci 1986;28(3):269.
[20] Anderson JL, Kim J. J Chem Phys 1987;86:5163.
[21] Perepelkin PV, Starov VM, Filippov AN. Colloid J Russ Acad Sci 1992;54
(2):139 (English Translation).
[22] Vasin SI, Starov VM, Filippov AN. Colloid J Russ Acad Sci 1996;58(3):291
(English Translation).
[23] Vasin SI, Filippov AN. Colloid J Russ Acad Sci 2004;66(3):261 (English
Translation).
[24] Vasin SI, Starov VM, Filippov AN. Colloid J Russ Acad Sci 1996;58(3):282
(English Translation).
[25] Filippov AN, Vasin SI, Starov VM. Colloids Surf A Physicochem Eng Asp
2006;282-283:272.
[26] Starov V, Zhdanov V. Colloids Surf A Physicochem Eng Asp 2001;192:363.
[27] Starov V, Zhdanov V. Adv Colloid Interface Sci 2008;137:2.
[28] Kuwabara S. J Phys Soc Jpn 1959;14:527.
[29] Kvashnin AG. Fluid Dyn 1979;4:154 (in Russian).
[30] Cunningham E. On the steady state fall of spherical particles through fluid
medium. Proc R Soc Lond 1910;A83:357.
[31] Mehta G, Morse T. J Chem Phys 1975;63(5):1877.
[32] Brinkman H. Appl Sci Res 1947;A1:27.
Glossary
Latin
ã= R̃+ δ̃
b̃
F̃st
F̃solid
k̃
L̃11
L̃h
i
m ¼ ÃÃo
p̃
R̃
r̃, θ, φqffiffiffiffi
o
R̃b ¼ Ãk̃
s0 ¼ R̃ãb
s ¼ ps0ffiffiffi
radius of the particle with porous shell
radius of a spherical cell
Stokes force exerted to the solid particle of the
radius ã
Stokes force exerted to the solid particle of the radius
R̃
resistance in the Brinkman's equations
hydrodynamic permeability of the membrane
effective hydrodynamic thickness of the porous shell
the viscosity ratio
pressure
radius of the solid particle
spherical co-ordinate system
Brinkman's length
m
Ũ (|Ũ| = Ũ ) uniform flow with velocity on the cell boundary
ṽ
velocity
Greek
δ̃
γ3
ε
μ̃
σ̃rθ and σ̃rr
θ
Ω
thickness of a porous shell
volume fraction of particles
porosity of the membrane
viscosity
tangential and normal components of the viscous
stress
polar angle
the ratio of the real drag force exerted to the particle
to the Stokes force exerted to the particle of the same
radius
Superscripts
∼
dimensional value
o
in the cell outside the porous cell
i
inside the porous shell