SVPWM Based Three Phase Inverter Fed BLDC Drive
advertisement

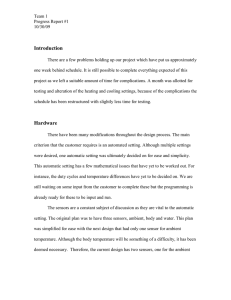
ISSN: 2348-0033 (Online) ISSN : 2249-4944 (Print) IJEAR Vol. 4, Issue Spl-1, Jan - June 2014 SVPWM Based Three Phase Inverter Fed BLDC Drive 1 1,2,3 Dr. P. V. V. Rama Rao, 2P. Devi Kiran, 3A. Sireesha Dept. of EEE, Shri Vishnu Engineering College for Women, Bhimavaram, AP, India Abstract In high power, high torque and low torque applications BLDC motors are widely used because of high efficiency, simple construction, low cost less maintenance and high torque or high output power per unit volume. For driving the BLDC motor we required inverter. PWM inverter which gives good performance. In two level inverters there is a problem of harmonics distortion, heating of rotor shaft, voltage spikes across the motor terminals etc. The use of space vector modulation PWM technique can give better results when compared with the ordinary PWM techniques. In this paper SVPWM controlled inverter is used to feed the BLDC motor drive. Simulation is carried out using matlab / simulink, validating the steady state and dynamic performance of the drive. Keywords Brushless DC (BLDC) Drive, PWM, Space Vector Pulse Width Modulation (SVPWM). I. Introduction In recent years, industry has begun to demand higher power equipment. Three phase inverters have been increasing attention for power conversion in high-power applications due to their lower harmonics, higher efficiency, and lower voltage stress compared to single phase inverters [1]. The Brushless DC (BLDC) motor is the perfect choice for applications that require high reliability, high efficiency, and high power-to-volume ratio. Generally, a BLDC motor is considered to be a high performance motor that is capable of providing large amounts of torque over a vast speed range. BLDC motors are a derivative of the most commonly used DC motor, the brushed DC motor, and they share the same torque and speed performance curve characteristics. The major difference between the two is the use of brushes. BLDC motors do not have brushes (hence the name “brushless DC”) and must be electronically commutated [2]. A sensorless speed permanent magnet synchronous motor (PMSM) with direct torque control (DTC) using single DC-link voltage and current sensors is proposed. In this paper prediction is based on the dynamic motor model, the inverter switches states adjustment and the measured DC-link current. Then whole system is then incorporated into a speed sensorless DTC scheme and the rotor speed is estimated [3]. In fact, a DTC scheme achieves the closedloop control of the motor stator flux and the electromagnetic torque without using any current loop or shaft sensor [4]. Many researchers are interested in this control technique because of its wide area applications used with various ac machine types as induction motor, PMSM [5], PM Brushless [6], and reluctance motor [7]. In this paper modelling of BLDC Drive and simulation of SVPWM based BLDC Drive is presented using MATLAB/ Simulink tool. II. Brush Less DC Drive A brushless DC motor is similar to that Brush DC motor in that it has an internal shaft position feedback that tells which windings to switch on at which exact moment. This internal feedback gives linear speed-torque curves which are well suited for speed 28 International Journal of Education and applied research and position control and high starting torque for both the brush DC motor and the brushless DC motor. The internal feedback is accomplished in a brush type DC motor with the mechanical commutator (a series of copper bars which are insulated from each other) and the mechanical brushes through which the current is fed into the commutator bars and switched sequentially into the appropriate winding in the armature. In a BLDC motor, the internal feedback is accomplished by a shaft position feedback sensor of some type which gives the required shaft position information to the drive electronics. The drive electronics in turn switches on the appropriate windings at exactly the right moment. This internal shaft position feedback also gives the BLDC characteristics which are similar to the characteristics of a DC motor like linear speedtorque characteristics and high starting torque. The power supplied to a BLDC motor can be DC power but it can also be AC if the drive electronics has the necessary circuitry to convert the AC power to DC. Fig. 1 shows the block diagram of the brushless dc drive. The mathematical modelling of a BLDC drive is developed with the help of following equations. These equations are used to develop the simulink model of BLDC drive. So that the simulation of the said Space Vector Pulse Width Modulation (SVPWM) Fig. 1: Block Diagram of the Brushless dc Drive (1) Where Va, Vb, Vc are the phase voltages ia, ib, ic are the phase currents, Ea, Eb, Ec are the phase back-EMF waveforms, R is the phase resistance, L is the self inductance of each phase and M is the mutual inductance between any two phases. So the electromagnetic torque can be obtained as: (2) where ωr is the mechanical speed of the rotor and T is the electromagnetic torque. The equation of motion is: w w w. i j e a r. o r g ISSN: 2348-0033 (Online) ISSN : 2249-4944 (Print) (3) B is the damping constant, J is the moment of inertia of the drive and Tl is the load torque. The electrical frequency related to the mechanical speed for a motor with P numbers of poles is: A. Advantages 1. High Speed Operation: A BLDC motor can operate at speeds above 10,000 rpm under loaded and unloaded conditions. 2. Responsiveness & Quick Acceleration: Inner rotor Brushless DC motors have low rotor inertia, allowing them to accelerate, decelerate, and reverse direction quickly. 3. High Power Density: BLDC motors have the highest running torque per cubic inch of any DC motor. 4. High Reliability: BLDC motors do not have brushes, meaning they are more reliable and have life expectancies of over 10,000 hours. This results in fewer instances of replacement or repair and less overall down time for your project. III. PWM Techniques The DC-AC inverters usually operate on Pulse Width Modulation (PWM) technique. The PWM is a very advance and useful technique in which width of the Gate pulses are controlled by various mechanisms. PWM inverter is used to keep the output voltage of the inverter at the rated voltage (depending on the user’s choice) irrespective of the output load. In a conventional inverter the output voltage changes according to the changes in the load. To nullify this effect of the changing loads, the PWM inverter correct the output voltage by changing the width of the pulses and the output AC depends on the switching frequency and pulse width which is adjusted according to the value of the load connected at the output so as to provide constant rated output. There are four basic PWM techniques. A. Single Pulse Width Modulation, B. Multiple Pulse Width Modulation, C. Sinusoidal Pulse Width Modulation. and D. Space Vector Pulse Width Modulation. A. Single Pulse Width Modulation In this modulation there is an only one output pulse per half cycle. The output is changed by varying the width of the pulses. The gating signals are generated by comparing a rectangular reference with a triangular reference. The frequency of the two signals is nearly equal. IJEAR Vol. 4, Issue Spl-1, Jan - June 2014 be modulated in such a way so that the average voltage waveform corresponds to a pure sine wave. The simplest way of producing the SPWM signal is through comparing a low power sine wave reference with a high frequency triangular wave. This SPWM signal can be used to control switches. Through an LC filter, the output of Full Wave Bridge Inverter with SPWM signal will generate a wave approximately 13 equal to a sine wave. This technique produces a much more similar AC waveform than that of others. The primary harmonic is still present and there is relatively high amount of higher level harmonics in the signal. D. Space Vector Pulse Width Modulation The most common and popular technique for generating True sine Wave is Pulse Width Modulation (PWM). Space vector pulse width modulation (SVPWM) is an optimum pulse width modulation technique for an inverter used in a variable frequency drive applications. It is computationally rigorous and hence limits the inverter switching frequency. In SVPWM methods, the voltage reference is provided using a revolving reference vector. In this case magnitude and frequency of the fundamental component in the line side are controlled by the magnitude and frequency, respectively, of the reference voltage vector. Space vector modulation utilizes dc bus voltage more efficiently and generates less harmonic distortion in a three phase voltage source inverter. A three phase inverter can be controlled so that at no time are both switches in the same leg turned on or else the DC supply would be shorted. This requirement may be met by the complementary operation of the switches within a leg. i.e. if A+ is on then A− is off and vice versa. This leads to eight possible switching vectors for the inverter, V0 through V7 with six active switching vectors and two zero vectors. Space vector modulation as shown in fig. 2 has a reference signal Vref sampled with a frequency fs (Ts = 1/fs). The reference signal may be generated from three separate phase references using the αβγ transform. The reference vector is then synthesized using a combination of the two adjacent active switching vectors and one or both of the zero vectors. Various strategies of selecting the order of the vectors and which zero vector(s) to use exist. Strategy selection will affect the harmonic content and the switching losses. B. Multiple Pulse Width Modulation In this modulation there are multiple number of output pulse per half cycle and all pulses are of equal width. The gating signals are generated by comparing a rectangular reference with a triangular reference. The frequency of the reference signal sets the output frequency and carrier frequency. C. Sinusoidal Pulse Width Modulation In this modulation technique there are multiple numbers of output pulse per half cycle and pulses are of different width. The width of each pulse is varying in proportion to the amplitude of a sine wave evaluated at the centre of the same pulse. The gating signals are generated by comparing a sinusoidal reference with a high frequency triangular signal. Sinusoidal Pulse Width Modulation is the best technique for this. This PWM technique involves generation of a digital waveform, for which the duty cycle can w w w. i j e a r. o r g Fig. 2: Space Vectors Modulation Representation All eight possible switching vectors for a three-leg inverter using space vector modulation. An example Vref is shown in the first sector. Vref_MAX is the maximum amplitude of Vref before non-linear over modulation is reached. Space Vector PWM (SVPWM) method is an advanced; computation intensive PWM method and possibly International Journal of Education and applied research 29 ISSN: 2348-0033 (Online) ISSN : 2249-4944 (Print) IJEAR Vol. 4, Issue Spl-1, Jan - June 2014 the best techniques for variable frequency drive application. SVPWM is a different approach from PWM modulation, based on space vector representation of the voltages in the α-β plane. The α-β components are found by Clark’s transformation. SVPWM refers to a special switching sequence of the upper three power transistors of a three-phase power inverter. It has been shown to generate less harmonic distortion in the output voltages and/ or currents applied to the phases of an AC motor and to provide more efficient use of dc input voltage. Because of its superior performance characteristics, it has been finding widespread application in recent years. Space Vector PWM is superior as compared to Sinusoidal pulse width modulation in many aspects like, higher Modulation Index, more output voltage, less current and torque harmonics etc. 2. 5 2 1. 5 1 0. 5 0 -0. 5 -1 -1. 5 -2 -2. 5 1. 6 1. 65 1. 7 1. 75 1. 8 Time 1. 85 1. 9 1. 95 2 Fig. 5: BLDC Drive Current Waveform line voltages IV. Simulation and Results The simulation diagram and the obtained waveforms of space vector pulse width modulation technique applied three phase inverter fed brushless dc drive are shown below. Fig. 3 shows simulink diagram of Space Vector Pulse Width Modulation developed in MATLAB/ Simulink environment. Fig.4 shows the simulink model of svpwm three phase inverter fed BLDC drive. 120 100 80 60 40 20 + - v +v - E g m 0. 4 0. 6 0. 8 1 Time 1. 2 1. 4 1. 6 1. 8 2 + -i 1. 2 + -i 1. 15 + -i 1. 1 line voltages g C E E E 1. 05 g2 m g6 m g C g4 m 0. 2 [g2] C [g6] g [g4] E E m g5 0 Fig. 6: Speed Curve of Brushless dc Motor Drive +v - C C C g3 m g1 0 +v - [g5] g [g3] g [g1] 1 control circuit 0. 95 0. 9 Fig. 3: Simulink Diagram of SVPWM Technique 0. 85 1. 6 powergui + v g C E + v - E g5 m E m g [g5] g3 m g1 C g [g3] C [g1] S tep + -i + SS1 Tm + i - A <> m B cvs s - + -i g G oto9 SS2 G oto10 <> SS3 G oto11 C g <> sc E m E emf _abc Decoder C g2 m E g6 m g4 H all Permanent Magnet Synchronous Machine [g2] C g [g6] C [g4] t S ubsystem -K - <R otor s peed wm (rad/s )> ra d2rpm P ID C onsta nt P ID 100 s ra d2rpm1 -1 Fig. 4: Simulation of SVPWM Inverter Fed BLDC Drive The current waveform of SVPWM inverter fed BLDC drive is shown in fig. 5. It is observed that the output currents are showing the effectiveness of SVPWM Technique. Speed curve of SVPWM inverter fed BLDC drive shown in fig. 6. fig. 7 shows the torque response of SVPWM inverter driven BLDC drive. Fig. 8 shows the output voltage waveform of SPWM. 30 1. 7 1. 75 1. 8 Time 1. 85 1. 9 1. 95 2 Fig. 7: Torque of Brushless dc Motor Discrete, Ts = 1e-005 s. + v - 1. 65 International Journal of Education and applied research V. Conclusion This paper presented the BLDC drive control using SVPWM in MATLAB/ Simulink. SVPWM has many advantages over the other PWM techniques. The SVPWM technique results better performance of the BLDC drive. This SVPWM control scheme is very much useful for high power low torque applications. The simulink model and the simulation results presented in the paper demonstrate that the satisfactory performance of the BLDC drives. References [1] C. Xia, Z. Li, T. Shi,“A control strategy for four-switch threephase brushless DC motor using single current sensor”, IEEE Trans.Industrial Electronics, Vol. 56, No. 6, pp. 2058-2066, June 2009. [2] A. Sathyan, M. Krishnamurthy, N. Milivojevic, A. Emadi, “A low-cost digital control scheme for brushless DC motor drives in domestic applications”, In proc. IEMDC’09, 2009, pp. 76-82. [3] E. Peralta-Sanchez, F. Al-rifai, N. Schofield,“Direct torque control of permanent magnet motors using a single current sensor’’, International Conference on Electrical Machines and Drives IEMDC 2009, pp. 89-94, 2009. w w w. i j e a r. o r g ISSN: 2348-0033 (Online) ISSN : 2249-4944 (Print) IJEAR Vol. 4, Issue Spl-1, Jan - June 2014 [4] Y. Zhang, J. Zhu,“Direct torque control of permanent magnet synchronous motor with reduced torque ripple and commutation frequency”, IEEE Transactions Power Electronics., Vol. 26, No. 1, PP. 235–248, Jan. 2011 [5] Y. Zhang, J. Zhu,“A novel duty cycle control strategy to reduce both torque and flux ripples for DTC of permanent magnet synchronous motor drives with switching frequency reduction”, IEEE Transactions Power Electronics., Vol. 26, No. 10, pp. 3055–3067, Oct. 2011. [6] K. D. Hoang, Z. Q. Zhu, M. P. Foster,“Influence and compensation of inverter voltage drop in direct torque ontrolled four-switch three phase PM brushless AC drives”, IEEE Transactions Power Electronics., Vol. 26, No. 8, pp. 2343–2357, Aug. 2011. [7] S. Bolognani, L. Peretti, M. Zigliotto,“Online MTPA control strategy for DTC synchronousreluctance- motor drives”, IEEE Transactions Power Electronics., Vol. 26, No. 1, pp. 20–28, Jan. 2011. w w w. i j e a r. o r g International Journal of Education and applied research 31