Freescale Semiconductor, Inc.
Application Note
Document Number: AN5047
Rev. 0, 01/2015
Low-Power Rotation Sensing with
Magneto Resistive Sensors and
Kinetis L MCUs
The Freescale Kinetis L low-power MCU family offers
superb low-power features which allow the use of various
MCU peripherals in an asynchronous mode while the CPU is
in one of many low-power modes. The LPUART, SPI, I²C,
ADC, DAC, LP timer and DMA support in the low-power
mode operation, without waking up the core, gives designers
the freedom to build various low-power sensing devices.
1
Introduction
This application note shows how to build a low-power
encoder based on the magneto resistive (MAG) sensors. The
goal is to build a very low-power/low-rotation speed design
which may be used in the paddle wheel flow meters to
measure paddle wheel rotation.
The important advantage of a magnetic sensor is its low
power consumption and simple implementation. The
traditional dry paddle wheel flow meter uses a magnetic
clutch between the paddle wheel and counter. If magnetic
sensors are used and the mechanical counter is replaced by
its electronic version, there is no need for changes in the
paddle wheel (wet) part of the meter. The wet part remains
the same and the customer may select to use the mechanical
or electronic counter.
© 2015 Freescale Semiconductor, Inc. All rights reserved.
Contents
1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2. The magneto resistive sensor principle and how to build
a quadrature encoder. . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3. Set up the Kinetis L periphery for low-power encoder
measurement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
4. Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
5. Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
A. Board schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
The magneto resistive sensor principle and how to build a quadrature encoder
The electronic paddle wheel flow meters (hybrid flow meters) are battery operated and obviously current
consumption is a critical part of the design.
2
The magneto resistive sensor principle and how to
build a quadrature encoder
There are many types of magnetic sensors, which we can sort by the measurement principle and sensor
output. There are two main measurement principles, the Hall effect and magneto resistive sensors.
Magneto resistive:
• Outputs voltage in tens of millivolts, low noise, stable
• Reacts on both N and S polarities
• Operates in a horizontal magnetic field
• Bridge has a fast response (uS)
• Superior temperature stability
• Low power consumption ~5k Ohms bridge
Hall effect resistive:
• Operates in a vertical magnetic field
• Reacts only on one polarity
• Outputs voltage in the millivolt range (requires pre-amplification)
2.1
•
•
Possible outputs
Digital
— Continuously operated – sensing element provides a continuous output which is transformed
into a digital value
— Sampled – sensor element is powered/sensed at a predefined sampling rate to save current
flowing through, and the value is latched on a digital output
— Sampled with output latch – each time a sensor is powered on, the sensing element is measured
and the digital output signal is latched
Analog single ended / differential – provides direct output from the sensing element bridge
To show the advanced periphery set available on the Kinetis-L MCU, the simplest possible sensor was
chosen for this application note. The HGRAMA001A magneto resistive sensor provides analog output
from a magneto resistive bridge. The analog signal from the sensor bridge is connected to the comparator
input.
2.2
Build the encoder
The key element of the encoder is the magnetic clutch attached to the paddle wheel and the two magneto
resistive sensors. The paddle wheel is placed in the wet part of the meter, while the magneto resistive
sensors are in the counter – the dry part. The paddle wheel is rotating proportionally to the water flow, and
the attached magnetic clutch creates a rotating magnetic field. The sensors transform the magnetic field to
Low-Power Rotation Sensing with Magneto Resistive Sensors and Kinetis L MCUs, Application Note, Rev. 0, 01/2015
2
Freescale Semiconductor, Inc.
The magneto resistive sensor principle and how to build a quadrature encoder
the output voltage. The sensors’ output voltage has the character of two sine waves shifted by 90 degrees
to each other.
Figure 1. Paddle wheel and magnetic clutch
The magnetic clutch is composed of a few magnetic poles. In Figure 2, there is a clutch with two magnet
poles.
Figure 2. The magnetic sensor-based encoder principle at work
Two magnetic sensors are placed near to the magnetic clutch attached to the paddle wheel. The diagram
shows sensor output voltage as a function of the magnetic clutch angular position.
The magnetic sensor output voltage is sensed by means of the comparator, so the sine wave is transformed
into the rectangular signal as shown in Figure 3.
Low-Power Rotation Sensing with Magneto Resistive Sensors and Kinetis L MCUs, Application Note, Rev. 0, 01/2015
Freescale Semiconductor, Inc.
3
Set up the Kinetis L periphery for low-power encoder measurement
7XUQULJKW
6HQVRU
6 6 6 6 6 6 6 6
6HQVRU
7XUQOHIW
6HQVRU
6 6 6 6 6 6 6 6
6HQVRU
Figure 3. The quadrature encoder signals from the sensors when turned right/left in continuous mode
In Figure 3, there is a graph of signals produced by the encoder. The angular position, and thus, rotation
and the rotation direction may be determined from the actual waveform. The signals in the picture are
continuous but in reality the magnetic sensors are used in the sampling mode.
A common magneto resistive sensor has an impedance of around 10k Ohm, so that, assuming a 3.3V
power supply, the sensor draws 330uA. To lower the current consumption, sensors are operated in the
triggered mode. The power supply to a sensor is applied only for a short time, like 30us, and the sensor
output is sampled.
What is the lowest sampling rate to correctly measure rotation?
For accuracy and safe rotation detection, the correct sampling rate is important. Use the following formula
to calculate the minimal sampling rate, provided that there are two sensors spaced by 90 degrees to each
other.
3
Set up the Kinetis L periphery for low-power encoder
measurement
The Kinetis L family of microcontrollers has a rich set of peripherals and features that enable the sensing
and processing of analog signals without CPU intervention. A smart combination of the low-power
peripherals with the unique features of DMA works as an independent scanning engine to sense an
encoder.
This section covers interfacing of the magneto resistive sensors, configuration of the peripherals and a
description of the measurement technique.
Low-Power Rotation Sensing with Magneto Resistive Sensors and Kinetis L MCUs, Application Note, Rev. 0, 01/2015
4
Freescale Semiconductor, Inc.
Set up the Kinetis L periphery for low-power encoder measurement
3.1
Magneto resistive sensor schematic and interface to Kinetis L
periphery
As mentioned previously, hybrid flow meters are battery operated and power consumption is obviously
very important, and the way of interfacing the sensors determines the final consumption. To achieve low
power consumption while sensing the magneto resistive sensors, only the peripherals are working while
the CPU is in the very low-power mode. Figure 4 is a block diagram of interfacing the magneto resistive
sensors. Timer TPM0 CH1 supplies the sensors.
The TPM0, clocked directly from the 32 kHz crystal, may stay counting while the CPU is in one of the
many power saving modes. The timers continue to count clocks, and, if in the PWM mode, the timers’
outputs may be propagated on the pins.
Timer TMP0 generates a power supply waveform to the sensors. The timer generates a 30uS pulse at the
rate of the sampling frequency. At the end of TPM0CH1 pulse, the comparator CMP reads out the voltage
on the sensor. The comparator’s multiplexer MUX selects the signal from the actually measured sensor.
M CG
32kHz
T PM 0 CH1
KINET IS KL46
CM P
M
U
X
cm p ch0
SENSOR 0
cm p ch1 SENSOR 1
Figure 4. Magneto resistive sensor interfacing block diagram
3.2
Sensor measurement timing diagram
Figure 5 shows a detailed sensor control timing diagram. The timer TPM0CH1 is set to the PWM mode.
The modulo register defines the measurement sampling rate. The magnetic sensor is active only for the
single bus clock, so that is 30us. During this 30us, the magneto resistive sensor is powered and the
comparator enabled. At the end of the pulse, the comparator output is read and stored. In the first
measurement cycle, the sensor 0 is read, while in the next measurement cycle, the comparator reads the
second sensor. Timer TPM0CH1 controls the sensors’ power supply and measurement timing.
Low-Power Rotation Sensing with Magneto Resistive Sensors and Kinetis L MCUs, Application Note, Rev. 0, 01/2015
Freescale Semiconductor, Inc.
5
Set up the Kinetis L periphery for low-power encoder measurement
T PM0 overflow
TPM0CH1 pulse
T PM 0 com pare
T PM 0 overflow
T PM 0 compare
1 busclock
30us
1/sam pling freq.= busclock * T PM 0 modulo
Power supply sensor
CM P read status
sensor 0
CM P read status sensor0
Sensor 0
sensors have differential output
CMP read status sensor1
Power supply sensor
Power supply sensor
Sensor 1
CM P off
CM P enable
Com parator enable
com parator scan
channel 0
CM P off
CM P enable
com parator scan
channel 1
CM P off
CMP enable
com parator scan
channel 0
Figure 5. Sensor control signal timing diagram
3.3
How the comparator is controlled
It was previously mentioned that the comparator reads sensor voltage at end of a TPM0CH1 pulse. How
is this driven, and how is the comparator output status processed?
The guts of the sensor sampling mechanism are three channels of the Direct Memory Access (DMA)
periphery running in the VLPS mode without CPU intervention. The DMA periphery can move data
between RAM and registers of arbitrary periphery. This technique allows the DMA to control periphery
by setting their control registers. In the opposite transfer direction, the DMA may read a periphery status
register and store content in the RAM.
The DMA transfers operate in the triggered mode, which means that a single DMA transfer is performed
every time the DMA channel is triggered.
The timer TPM0 runs in the VLPS mode and TPM0 can also trigger DMA transfers. By the proper setting
of the TPM0 timer and related timer channel TPM0CH1, both are working as the trigger event of
associated DMA channels, and the scanning state machine may be formed. The state machine performs
scanning by CMP comparator inputs and stores the results in the RAM memory. After a predefined number
of scanning cycles, the CPU wakes up and results in the RAM are processed.
Low-Power Rotation Sensing with Magneto Resistive Sensors and Kinetis L MCUs, Application Note, Rev. 0, 01/2015
6
Freescale Semiconductor, Inc.
Set up the Kinetis L periphery for low-power encoder measurement
RAM memory
CMP MUX
channel 0
CMP MUX
channel 1
CMP MUX
channel 0
CMP MUX
channel 1
MCG
32kHz
TPM0-CH1
CMP MUX
channel off
Comparator
result 0
Step3:
DMA CH2, 1B transfer
T rg: DMA CH1
moves MUX setting to
CMP MUX
Step1:
DMA CH0 , 1B transfer
T rg: TPM0-CH1
moves MUX setting to CMP MUX
quartz
CMP MUX
channel off
pulse
Comparator
result 1
Comparator
result x
Step2:
DMA CH1, 1B transfer
T rg: T PM0-OVF
stores CMP result to RAM
sensor 0 sensor 1
TPM0-OVF
Result
T PM0-CH1
pulse
channel 0
channel 1
MUX
Comparator
Figure 6. Setting the DMA channels, timer and comparator to build a scanning machine
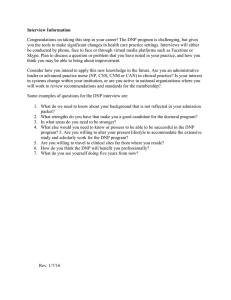
Figure 6 is a block diagram with the connection of the peripherals and DMA channels. The CPU is in the
VLPS mode, the time domain is generated by a quartz crystal so that the bus clock is 32,768 kHz. The
TPM0 timer is clocked from the bus clock. The TPM0 timer is used to trigger the DMA and to power
supply the sensors.
The TPM0 modulo register value defines the timer overflow, and thus the sampling rate. Provided that the
bus clock is 32 kHz and the sampling rate is 400 Hz, the TPM modulo register must be set to the value
32k/400.
The common paddle wheel-based flow meter has a rotation ~40 rotations per second at maximal flow and
then the minimal sampling rate is 320 samples per second (the 180 samples per second each sensor). To
have a margin above the Nyquist frequency, the sampling rate was set to 400 Hz
The scanning state machine is repeatedly performing the following steps:
• Step 1: A TPM0 CH1 overflow event triggers an associated DMA CH0 channel transfer. The DMA
CH0 is set to transfer a configuration byte from RAM to the CMP MUX register, to connect the
comparator to the sensor0.
— The CMP MUX channel setting also controls the comparator on/off state. If the CMP MUX
channels are set to a non-valid state (for example, comparator positive and negative input to the
same pin), the comparator switches off. Correctly selected MUX inputs will switch the
comparator on.
— The TPM0CH1 output is propagated to the pin and supplies the sensors.
• Step 2: A TPM0 compare event triggers DMA CH1 to transfer the CMP output status register value
to the RAM. Results from both sensors are stored into the single array in the form: sensor1result,
sensor2result, sensor1result, sensor2result, sensor1result, sensor2result,… .
• Step 3: DMA CH2 is linked to DMA CH1, and is triggered once the DMA CH1 finishes transfer.
The DMA CH2 is set to transfer a control byte to the CMP MUX register again. The DMA CH2
Low-Power Rotation Sensing with Magneto Resistive Sensors and Kinetis L MCUs, Application Note, Rev. 0, 01/2015
Freescale Semiconductor, Inc.
7
Set up the Kinetis L periphery for low-power encoder measurement
transfers the MUX setting with both inputs set to the same pin, and thus switches the comparator
off.
After a predefined number of DMA cycles (256 cycles in this case), the CPU is awoken and the results
stored in the RAM are processed. In the RAM memory, there is a byte array filled with values
corresponding to the state of the sensors.
Sensor 1
Sensor 2
Sensor
1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2
RA M
0 0 1 0 1 0 1 0 1 1 1 1 1 1 1 1 0 1 0 1 0 0 0 0
Figure 7. Comparator output state is stored in the array in the RAM on each measurement cycle
1
The results of sensor 0 and sensor 1 are interlaced in the array.
3.4
Hardware used to implement the encoder
The encoder framework was implemented on a Kinetis MKL46Z256 processor. For the development, the
tower system was used. The development set contains the processor board TWR-KL46Z48M, primary and
secondary elevators (TWR-ELEV-PRIMARY, TWR-ELEV-PRIMARY,) and the peripheral module
TWR-FLOW-MAG. See the boards in Figure 8.
Low-Power Rotation Sensing with Magneto Resistive Sensors and Kinetis L MCUs, Application Note, Rev. 0, 01/2015
8
Freescale Semiconductor, Inc.
Set up the Kinetis L periphery for low-power encoder measurement
Figure 8. The accessory board TWR_FLOW_MAG
1
Assembled with a spindle to attach the paddle wheel with a magnetic clutch. This is the way to emulate a real flow meter on
the desk.
Figure 9. The TWR-FLOW-MAG board with a paddle wheel as the encoder
There are several jumpers and header connectors on the board, serving as test points and to configure the
sensors used. For detailed information, refer to Appendix A, “Board schematic.
Low-Power Rotation Sensing with Magneto Resistive Sensors and Kinetis L MCUs, Application Note, Rev. 0, 01/2015
Freescale Semiconductor, Inc.
9
Set up the Kinetis L periphery for low-power encoder measurement
Detailed board description:
The magnetic sensor peripheral board TWR_FLOW_MAG is assembled with two different sensor pairs,
HGRAMA001A and HMC1501. There is a set of headers used to select which pair is connected to the
power supply and comparator. Each time, only one type of sensor may be used.
Figure 10. Peripheral board description
J5 power supply: The sensors are powered by the timer TPM0CH1 output pin. Use a jumper to power
supply a selected sensor pair.
• 1-2: the HMP1501 sensors are supplied
• 2-3 the HGRAMA001A sensors are supplied
• J1, J2, J3, J4 : headers to select which sensor pair is connected to the comparator input.
• 1-2: the HMC1501 sensors are connected to comparator inputs
• 2-3: the HGRAMA001A sensors are connected to comparator inputs
J6 test points:
• J6[Pin1]: the TPM1CH1 timer output pin
• J6[Pin2]: the TPM1CH0 timer output pin
• J6[Pin3]: the CMP0_OUT comparator output pin
J7 test points:
• J7[Pin1]: the TPM0CH0 timer output pin
• J7[Pin2]: the TPM0CH2 timer output pin
• J7[Pin3]: the TPM0CH3 timer output pin
Low-Power Rotation Sensing with Magneto Resistive Sensors and Kinetis L MCUs, Application Note, Rev. 0, 01/2015
10
Freescale Semiconductor, Inc.
Software
4
Software
This section describes the software application of the Kinetis-L magneto resistive sensor encoder demo.
The software application consists of the setting of all the peripherals needed, measurement and calculation
of the paddle wheel turns.
The application software has been written in C-language and compiled using the IAR Embedded
Workbench for ARM (version 6.50.6), with full optimization for execution speed. The software
application is based on the Kinetis-L bare-metal software drivers.
The software consists of a few basic blocks.
In the beginning, the processor is awoken by a Power on Reset. At the start, the clock is changed to 32 kHz
crystal.
In the following step, all the peripheries are configured. The clock is enabled only to the running
peripheries, to save current. The low-voltage detect unit is enabled to sense the battery level. The TMP0
timer is configured and the related pin is set to output.
Then the LCD driver periphery and RTC are initialized. As the last step, the comparator CMP and DMA
channels are set up and then an interrupt is enabled.
The CPU goes into VLPS mode and may be awoken by one of the following interrupts:
• DMA interrupt service routine is called after a predefined number of DMA cycles. The states of
the sensors stored in the RAM are processed and the counters of the paddle wheel turns are
updated. DMA channels are re-initialized and the LCD screen is refreshed.
• PORT interrupt service routine is called whenever the SW4 button is pressed. In the routine, the
index to the LCD screen is updated
• Real-time clock (RTC) interrupt service routine is called each second, and the task scheduler is
called. The task scheduler is a table of tasks called at a defined time daily and at a defined time and
date each month.
• LVD interrupt service routine – this interrupt is called once the power supply voltage drops below
a preset level, indicating that the battery is empty. The user should do the maintenance necessary
to avoid a CPU runaway and data corruption.
Low-Power Rotation Sensing with Magneto Resistive Sensors and Kinetis L MCUs, Application Note, Rev. 0, 01/2015
Freescale Semiconductor, Inc.
11
Conclusion
Power on Reset
Set clock to 32k Hz cry stal
Initialize peripheries:
TMR0, TMR1
PO RT,RTC ,LC D
DMA , C MP
Initialize v ariables
Enable interrupts
DMA ISR
re-initialize DMA channels
parse sensor states
stored in the RA M
update counters
refresh LC D screen
LVD ISR
low-v oltage detect
battery is low
C PU goes to VLPS
mode
PO RT ISR
called at button press
update LC D screen
RTC ISR
called at 1 sec interv al
run task scheduler
Figure 11. Software flow chart
5
Conclusion
5.1
The current consumption
All measurement was done in a laboratory at 25°C, the current measured by an HP34401A multimeter.
Table 1 is divided into two parts; the five rows at the beginning show the current consumption of the static
peripherals which are not dependent on the selected sampling rate. Periphery current consumption is in the
row “Current.” The row “Total” shows the cumulative current.
The CPU current consumption is in the VLPS mode, and draws 2.8uA. Adding TMP0, TMP1, RTC and
LCD to the processor current gives a total static current consumption of 4uA. In this state, the CPU remains
in the VLPS mode forever.
The second part of the table is dynamic and is dependent on the selected sampling rate, measured at 100,
200, 300 and 400 samples per second. The selected sampling rate also affects the current consumption of
the comparator and the comparator digital-to-analog converter CMP_DAC periphery, as those are enabled
only at measurement and stay disabled the rest of time.
Table 1. current consumption of the Kinetis-L in the VLPS mode with various peripheries active.
Adder static part
Current [uA]
Total [uA]
CPU VLPS mode
2.8
2.8
Low-Power Rotation Sensing with Magneto Resistive Sensors and Kinetis L MCUs, Application Note, Rev. 0, 01/2015
12
Freescale Semiconductor, Inc.
Conclusion
Table 1. current consumption of the Kinetis-L in the VLPS mode with various peripheries active.
TPM0
0.3
3.1
TPM1
0.3
3.4
RTC
0.1
3.5
LCD
0.5
4
DMA + CMP + CMP ADC @ 100Hz
4
8
DMA + CMP + CMP ADC @ 200Hz
7
11
DMA + CMP + CMP ADC @ 300Hz
11
15
DMA + CMP + CMP ADC @ 400Hz
15
19
HGRAMA001A @ 100Hz
2
21
HGRAMA001A @ 200Hz
4
23
HGRAMA001A @ 300Hz
6
25
HGRAMA001A @ 400Hz
8
27
Adder dynamic part / sampling rate
Adder of sensor
The last part of the table shows current consumption of the HGRAMA001 sensors dependent on the
sampling rate.
Low-Power Rotation Sensing with Magneto Resistive Sensors and Kinetis L MCUs, Application Note, Rev. 0, 01/2015
Freescale Semiconductor, Inc.
13
Board schematic
Appendix A
Board schematic
5
4
3
2
1
VDD _H G AR AM
VDD _H G AR AM
P T E 2 2 /A D C 0 _ D P 3 /A D C 0 _ S E 3 /U A R T 2 _ T X
CMP0_IN0
C M P 0 _ IN 0 /H M C
U2
VDD
0 DNP
C M P 0 _ IN 0 /H G A R A M
V1
3
C M P 0 _ IN 0 /H G A R A M
V1
3
C M P 0 _ IN 2 /H G A R A M
1
C M P 0 _ IN 1 /H G A R A M
V2
1
D
C M P 0 _ IN 3 /H G A R A M
HG ARAM 001A
4
H G ARAM 001A
4
J1
V2
GND
GND
1
2
3
D
VDD
U1
R1
2
2
P T C 6 /L L W U _ P 1 0 /E X T R G _ IN /S P I0 _ M IS O
H D R T H 1X3
VDD_HM C
VD D _HM C
CMP0_IN1
2
H D R T H 1X3
C M P 0 _ IN 0 /H M C
C M P 0 _ IN 1 /H M C
5
V B R ID G E
8
N C _3
N C _4
N C _6
HM C1501
OUT+
1
C M P 0 _ IN 2 /H M C
C
OUTGND1
OUTGND1
J2
OUT+
8
C M P 0 _ IN 3 /H M C
GND2
N C _3
N C _4
N C _6
3
4
6
2
C M P 0 _ IN 1 /H G A R A M
1
GND2
C M P 0 _ IN 1 /H M C
1
2
3
C
0 DNP
3
4
6
U4
V B R ID G E
U3
R2
7
5
P T E 2 0 /A D C 0 _ D P 0 /A D C 0 _ S E 0
7
P T C 7 /C M P 0 _ IN 1
H M C1501
J6
CMP0_IN2
P T C 8 /K L 4 6 _ U S B _ ID
P T E 2 3 /A D C 0 _ D M 3 /A D C 0 _ S E 7 A /U A R T 2 _ R X
R3
0
1
2
3
P T D 1 /A D C 0 _ S E 5 B /S P I0 _ S C K /F T M 0 _ C H 1
DNP
VD D _H M C
P T C 5 /L L W U _ P 9 /S P I0 _ S C K /C M P 0 _ O U T
P T A 1 2 /F T M 1 _ C H 0
P T A 1 3 /F T M 1 _ C H 1
H DR TH 1X3
VDD_HGARAM
B
B
J7
C M P 0 _ IN 2 /H G A R A M
1
2
3
1
2
3
1
2
3
C M P 0 _ IN 2 /H M C
P T D 0 /S P I0 _ P C S 0 /F T M 0 _ C H 0
P T D 2 /S P I0 _ M O S I/U A R T 2 _ R X /F T M 0 _ C H 2 /S P I0 _ M IS O
P T D 3 /S P I0 _ M IS O /U A R T 2 _ T X /F T M 0 _ C H 3 /S P I0 _ M O S I
H D R T H 1X3
J3
J5
H D R T H 1X3
H DR TH 1X3
CMP0_IN3
P T C 9 /C M P 0 _ IN 3 /I2 C 0 _ S D A /F T M 0 _ C H 5
R4
C M P 0 _ IN 3 /H M C
T h is d o c u m e n t c o n ta in s in fo rm a tio n p ro p rie ta ry to F re e s c a le a n d s h a ll n o t b e u s e d fo r e n g in e e rin g d e s ig n ,
p ro c u re m e n t o r m a n u fa c tu re in w h o le o r in p a rt w ith o u t th e e x p re s s w ritte n p e rm is s io n o f F re e s c a le .
0 DNP
____
C M P 0 _ IN 3 /H G A R A M
D e s ig n e r :
< D e s ig n e r>
D ra w in g T itle :
D ra w n b y:
< D ra w n B y>
P a g e T itle :
J4
A p p ro v e d :
< A p p ro v e r>
S iz e
A
H D R T H 1X3
4
____
A
P a d d le w h e e l a c c e s o ry b o a rd - m a g n e tic s e n s o r
D a te :
5
X
TW R_FLO W _M AG
1
2
3
A
P T E 2 1 /A D C 0 _ D M 0 /A D C 0 _ S E 4 A
3
D ocum ent N um ber
Rev
X
S C H -2 8 4 1 0 P D F : S P F -2 8 4 1 0
W e d n e s d a y, O c to b e r 0 1 , 2 0 1 4
2
Sheet
1
of
2
1
Figure 12. TWR_FLOW_MAG
Low-Power Rotation Sensing with Magneto Resistive Sensors and Kinetis L MCUs, Application Note, Rev. 0, 01/2015
14
Freescale Semiconductor, Inc.
Board schematic
5
4
3
2
1
D
D
E L E VAT O R
C O N N E C TO R
P5V_ELEV
P 5 V _E L E V
P5V_ELEV
P 5V _ E L E V
P 3 V 3_ R E G
P3V3_REG
P3V3_REG
E LE_P S _S E N S E
R5
DNP
0
P T E 2/S PI1_S C K
R 12
DNP
0
S D H C _C LK /S PI1_C LK
PT E4/SP I1_PC S0_B
PT E 1/S P I1_M O S I
R 14
R 15
R8
DNP
DNP
DNP
0
0
0
S D H C _D 3/S P I1_C S0_B
S D H C _C M D /SP I1_M O S I
SD H C _D 0/S PI1_M IS O
P T E 3/S PI1_M IS O
C
P T C 7 /C M P 0 _ IN 1
P T E 0/U A R T 1_T X/R T C _C LK O U T /C M P 0_O U T
P T B 11/S PI1_S C K
P T C 0/A D C 0_S E 14/T SI0_C H 13
P T B 1/A D C 0_S E9/T S I0_C H 6
P T B 2/A D C 0_S E12/T S I0_C H 7
P T B 3/A D C 0_S E13/T S I0_C H 8
PT A 5/F T M 0_C H 2
P T E 5/ G P IO 4
P T D 6/LLW U _ P15/A D C 0_SE 7B /SP I1_M O S I/U A R T 0_R X/S P I1_M ISO
PT D 5/AD C 0_SE 6B /SP I1_SC K/U A R T 2_T X /F T M 0_ C H 5
PT D 4/LLW U _P 14/S PI1_P C S 0/U A R T 2_R X /F T M 0_ C H 4
P T D 3 /S P I0 _ M IS O /U A R T 2 _ T X /F T M 0 _ C H 3 /S P I0 _ M O S I
P T D 2 /S P I0 _ M O S I/U A R T 2 _ R X /F T M 0_ C H 2 /S P I0 _ M IS O
P T D 0 /S P I0 _ P C S 0 /F T M 0 _ C H 0
P T D 4 /L L W U _ P 1 4 /S P I1 _ P C S 0 /U A R T 2 _ R X /F T M 0 _ C H 4
P T D 1 /AD C 0 _ S E 5 B /S P I0 _ S C K /F T M 0 _ C H 1
PT C 12/F T M _C LKIN 0
PTA7
B
P T A 14
P T C 18
P T C 6 /L L W U _ P 1 0 /E X T R G _ IN /S P I0 _ M IS O
P T C 5 /L L W U _ P 9 /S P I0 _ S C K /C M P 0 _ O U T
R 16
R 17
R 19
DNP
DNP
0
0
0
PT C 7_ELE V _G P IO 1
G P IO 2/SD H C _D 1
P T B 11_E LE V_G PIO 3
R 23
R 25
R 27
R 29
DNP
DNP
DNP
DNP
0
0
0
0
P T B 0_ELE V _A N 7
P T B 1_ELE V _A N 6
P T B 2_ELE V _A N 5
P T B 3_ELE V _A N 4
R 33
R 35
R 38
R 40
R 42
DNP
DNP
DNP
DNP
DNP
R 62
0
0
0
0
0
DNP
DNP
R 65
DNP
R 67
DNP
R 68
R 69
P T E 5_ELE V _G P IO 4
PT D 6_ELE V _P W M 6
PT D 5_ELE V _P W M 5
PT D 4_ELE V _P W M 4
0
0
0
R 47
R 49
R 51
R 53
R 55
R 59
0
0
P T D 3_E LEV _S PI0_M IS O
P T D 2_E LEV _S PI0_M O S I
P T D 0_E LEV _S PIO _C S0
P T D 4_E LEV _S PI0_C S 1
P T D 1_E LEV _S PI0_C LK
0
P T C 12_E LEV _G PIO 5
0
P T A 7_E LE V
0
P T A 14_ELE V
0
0
0
P T C 18_E LEV
P T C 6_E LEV _IR Q _B
P T C 5_E LEV _IR Q _A
P 3V 3_ R E G
J8A
B1
B2
B3
B4
B5
B6
B7
B8
B9
B10
B11
B12
B13
B14
B15
B16
B17
B18
B19
B20
B21
B22
B23
B24
B25
B26
B27
B28
B29
B30
B31
B32
B33
B34
B35
B36
B37
B38
B39
B40
B41
B42
B43
B44
B45
B46
B47
B48
B49
B50
B51
B52
B53
B54
B55
B56
B57
B58
B59
B60
B61
B62
B63
B64
B65
B66
B67
B68
B69
B70
B71
B72
B73
B74
B75
B76
B77
B78
B79
B80
B81
B82
5V_1
GND_1
3 .3 V _ 1
ELE_PS_SEN SE_1
GND_2
GND_3
S D H C _ C L K /S P I1 _ C L K
S D H C _ D 3 /S P I1 _ C S 1
S D H C _ D 3 /S P I1 _ C S 0
S D H C _ C M D /S P I1 _ M O S I
S D H C _ D 0 /S P I1 _ M IS O
ET H _C O L_1
ET H _R XE R _1
E T H _ T X C LK _ 1
ET H _T XEN _1
ET H _T XER
ET H _T XD 3
ET H _T XD 2
E T H _ T X D 1_ 1
E T H _ T X D 0_ 1
G P IO 1 /U A R T 1 _ R T S
G P IO 2 /S D H C _ D 1
G P IO 3
C L K IN 0
C LKO U T 1
GND_4
AN7
AN6
AN5
AN4
GND_5
DAC 1
T MR3
T MR2
G P IO 4
3 .3 V _ 2
PW M7
PW M6
PW M5
PW M4
C AN 0_R X
C AN 0_T X
1 W IR E
S P I0 _ M IS O /IO 1
S P I0 _ M O S I/IO 0
S P I0 _ C S 0
S P I0 _ C S 1
S P I0 _ C L K
GND_6
I2 C 1 _ S C L
I2 C 1 _ S D A
G P IO 5 /S P I0 _ H O L D /IO 3
R SR V_ B5 3
R SR V_ B5 4
IR Q _ H
IR Q _ G
IR Q _ F
IR Q _ E
IR Q _ D
IR Q _ C
IR Q _ B
IR Q _ A
E B I_ A L E /E B I_ C S 1
E B I_ C S 0
GND_7
E B I_ A D 1 5
E B I_ A D 1 6
E B I_ A D 1 7
E B I_ A D 1 8
E B I_ A D 1 9
E B I_ R /W
E B I_ O E
E B I_ D 7
E B I_ D 6
E B I_ D 5
E B I_ D 4
E B I_ D 3
E B I_ D 2
E B I_ D 1
E B I_ D 0
GND_8
3 .3 V _ 3
5 V_ 2
GND_9
3 .3 V _ 4
3 .3 V _ 5
G ND_10
G ND_11
I2 C 0 _ S C L
I2 C 0 _ S D A
G P IO 9 /U A R T 1 _ C T S
G P IO 8 /S D H C _ D 2
G P IO 7 /S D _ W P _ D E T
ET H _C R S
ET H_MDC_1
E T H _ M D IO _ 1
ET H _ R XC L K_ 1
ET H _R XD V_ 1
ET H _R XD 3
ET H _R XD 2
ET H_RXD1_1
ET H_RXD0_1
I2 S 0 _ M C L K
I2 S 0 _ D O U T _ S C K
I2 S 0 _ D O U T _ W S
I2 S 0 _ D IN 0
I2 S 0 _ D O U T 0
G ND_12
AN 3
AN 2
AN 1
AN 0
G ND_13
DAC 0
T MR1
T MR0
G P IO 6
3 .3 V _ 6
PW M3
PW M2
PW M1
PW M0
U AR T 0_R X
U AR T 0_T X
U AR T 1_R X
U AR T 1_T X
VSSA
VDD A
C AN 1_R X
C AN 1_T X
G ND_14
G P IO 1 4
G P IO 1 5
G P IO 1 6 /S P I0 _ W P /IO 2
G P IO 1 7
U SB0_D M
U SB0_D P
U S B 0 _ ID
U S B 0 _V B U S
I2 S 0 _ D IN _ S C K
I2 S 0 _ D IN _ W S
I2 S 0 _ D IN 1
I2 S 0 _ D O U T 1
R S T IN
R ST O U T
C LKO U T 0
G ND_15
E B I_ A D 1 4
E B I_ A D 1 3
E B I_ A D 1 2
E B I_ A D 1 1
E B I_ A D 1 0
E B I_ A D 9
E B I_ A D 8
E B I_ A D 7
E B I_ A D 6
E B I_ A D 5
E B I_ A D 4
E B I_ A D 3
E B I_ A D 2
E B I_ A D 1
E B I_ A D 0
G ND_16
3 .3 V _ 7
PC I E X P R ES S T O W E R S Y ST EM
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
A14
A15
A16
A17
A18
A19
A20
A21
A22
A23
A24
A25
A26
A27
A28
A29
A30
A31
A32
A33
A34
A35
A36
A37
A38
A39
A40
A41
A42
A43
A44
A45
A46
A47
A48
A49
A50
A51
A52
A53
A54
A55
A56
A57
A58
A59
A60
A61
A62
A63
A64
A65
A66
A67
A68
A69
A70
A71
A72
A73
A74
A75
A76
A77
A78
A79
A80
A81
A82
J8B
D1
D2
D3
D4
D5
D6
D7
D8
D9
D 10
D 11
E LE _P S_S EN SE
I2C 0_S C L_E LEV
I2 C 0 _ S D A _ E L E V
PT C 9/ U A R T 1_C T S
PT B10_E LE V _G P IO 8
PT B9_E LEV _G P IO 7
R 13
R6
R9
R7
R 10
I2 S 0 _ M C L K
I2 S 0 _ T X _ B C L K
I2 S 0 _ T X _ F S
I2 S 0 _ R X D
I2 S 0 _ T X D
AN3
AN2
AN1
AN0
D A C 0_O U T _E LEV
TMR1
TMR0
G PIO 6_ELE V
P T C 4_E LE V_P W M 3
P T C 3_E LE V_P W M 2
P T C 2_E LE V_P W M 1
P T E 24_ELE V _P W M 0
PT A1_E LEV _U A R T 0_R X
PT A2_E LEV _U A R T 0_T X
ELE V_U A R T 1_R X
ELE V_U A R T 1_T X
VS S A_E LEV
VD D A_E LEV
G P IO 14
G P IO 15
R 57
R 58
DNP
G P IO 17
R 60
R 61
R 63
R 64
R 66
0 DNP
0 DNP
0 DNP
0
0 DNP
DNP
DNP
0
0
0
0
0
DNP
DNP
R 11
R 18
R 20
R 21
R 22
P T B 0/AD C 0_SE 8/T S I0_C H 0
P T E 25/I2C 0_SD A
P T C 9 /C M P 0 _ IN 3 /I2 C 0 _ S D A /F T M 0 _ C H 5
P T B 10/SP I1_P C S 0
PTB9
DNP
DNP
DNP
DNP
DNP
0
0
0
0
0
R 24
R 26
R 28
R 30
0
0
0
0
R 31
R 32
R 34
R 36
0
0
0
0
R 37
R 39
R 41
R 43
R 44
R 45
R 46
R 48
R 50
R 52
R 54
R 56
0
0
DNP
DNP
DNP
DNP
DNP
DNP
DNP
DNP
DNP
DNP
DNP
DNP
DNP
0
0
0
0
0
0
0
0
0
0
0
0
D 12
D 13
D 14
D 15
D 16
D 17
D 18
D 19
D 20
D 21
D 22
D 23
D 24
D 25
D 26
D 27
D 28
D 29
D 30
D 31
D 32
D 33
D 34
D 35
D 36
D 37
D 38
D 39
D 40
D 41
D 42
D 43
D 44
D 45
D 46
D 47
D 48
D 49
D 50
D 51
D 52
D 53
D 54
D 55
D 56
D 57
D 58
D 59
D 60
D 61
D 62
D 63
D 64
D 65
D 66
D 67
D 68
D 69
D 70
D 71
D 72
D 73
D 74
D 75
D 76
D 77
D 78
D 79
D 80
D 81
D 82
P T A17
P T A5/F T M 0_C H 2
P T A13/F T M 1_C H 1
I2S 0_R X D 0
P T A12/F T M 1_C H 0
P T E 2 0 /A D C 0 _ D P 0 /A D C 0 _ S E 0
P T E 2 1 /A D C 0 _ D M 0 /A D C 0 _ S E 4 A
P T E 2 2 /A D C 0 _ D P 3 /A D C 0 _ S E 3 /U AR T 2 _ T X
P T E 2 3 /A D C 0 _ D M 3 /A D C 0 _ S E 7 A /U A R T 2 _ R X
P T E 3 0 /D AC 0 _ O U T /A D C 0 _ S E 2 3
P T A 1 3 /F T M 1 _ C H 1
P T A 1 2 /F T M 1 _ C H 0
P T E 31/F T M 0_C H 4
P T C 4/LLW U _P 8/U AR T 1_T X /F T M 0_C H 3
P T C 3/LLW U _P 7/U AR T 1_R X /F T M 0_C H 2/C LK O U T
P T C 2/AD C 0_S E 11 /T S I0 _C H 15/I2C 1_SD A
P T E 24/I2C 0_SC L
P T A 1/T S I0_C H 2/U AR T 0_R X
P T A 2/T S I0_C H 3/U AR T 0_T X
U A R T 1_R X _ELE V
U A R T 1_T X _E LEV
V R EF H
PT B20
P T B 21
VREFL
VDDA
V SS A
P T B 22
KL46_ELE V _U SB 0_D N
KL46_ELE V _U SB 0_D P
P T C 8 /K L 4 6 _ U S B _ ID
VB U S _ELE V
R S T _IN _B
R S T _O U T _B
P T C 3_E LE V _C LK O U T
R 70
R 71
R 72
DNP
DNP
DNP
0
0
0
R S T _T G T M C U _B
P T A 6/T PM 0_C H 3
P T C 3/LLW U _P 7/U A R T 1_R X /F T M 0_C H 2/C LK O U T
5V_3
G N D _17
3 .3 V _ 8
ELE_PS_SEN SE_2
G N D _18
G N D _19
S P I2 _ C L K
S P I2 _ C S 1
S P I2 _ C S 0
S P I2 _ M O S I
S P I2 _ M IS O
5V_4
G N D _25
3 .3 V _ 1 1
3 .3 V _ 1 2
G N D _26
G N D _27
I2 C 2 _ S C L
I2 C 2 _ S D A
G P IO 2 5
U L P I_ S T O P
U L P I_ C L K
ET H _C O L_2
G P IO 2 6
ET H _R XER _2
ET H _MD C _2
ET H _T XC L K_ 2
E T H _ M D IO _ 2
E T H _ T X E N _2
ET H _R XC LK_2
G P IO 1 8
ET H _R XD V_2
G P IO 1 9 /S D H C _ D 4
G P IO 2 7 /S D H C _ D 6
G P IO 2 0 /S D H C _ D 5
G P IO 2 8 /S D H C _ D 7
ET H_T XD1_2
ET H _R X D 1_2
ET H_T XD0_2
ET H _R X D 0_2
U L P I_ N E X T /U S B _ H S _ D M
U L P I_ D A T A 0/I2 S 1 _ M C L K
U L P I_ D IR /U S B _ H S _ D P
U L P I_ D A T A 1 /I2 S 1 _ D O U T _ S C K
U P L I_ D A T A 5/U S B _ H S _ V B U S
U L P I_ D A T A 2 /I2 S 1 _ D O U T _W S
U L P I_ D A T A 6/U S B _ H S _ ID
U L P I_ D A T A 3 /I2 S 1 _ D IN 0
U L P I_ D A T A 7
U L P I_ D A T A 4 /I2 S 1 _ D O U T 0
G N D _20
G N D _28
L C D _ H S Y N C /L C D _ P 2 4
AN 11
L C D _ V S Y N C /L C D _ P 2 5
AN 10
AN 13
AN9
AN 12
AN8
G N D _21
G N D _29
L C D _ C L K /L C D _ P 2 6
G P IO 2 9 /U A R T 2 _ D C D
T MR 11
T MR9
T MR 10
T MR8
G P IO 2 1
G P IO 3 0 /U A R T 3 _ D C D
3 .3 V _ 9
3 .3 V _ 1 3
PW M15
PW M11
PW M14
PW M10
PW M13
PW M9
PW M12
PW M8
CAN2_R X
U A R T 2 _ R X D /T S I0
CAN2_T X
U A R T 2 _ T X D /T S I1
LC D _C O N T R AST
U A R T 2 _ R T S /T S I2
L C D _ O E /L C D _ P 2 7
U A R T 2 _ C T S /T S I3
L C D _ D 0 /L C D _ P 0
U A R T 3 _ R X D /T S I4
L C D _ D 1 /L C D _ P 1
U A R T 3 _ T X D /T S I5
L C D _ D 2 /L C D _ P 2
U A R T 3 _ R T S /C A N 3 _ R X
L C D _ D 3 /L C D _ P 3
U A R T 3 _ C T S /C A N 3 _ T X
G N D _22
G N D _30
G P IO 2 3
L C D _ D 4 /L C D _ P 4
G P IO 2 4
L C D _ D 5 /L C D _ P 5
L C D _ D 1 2 /L C D _ P 1 2
L C D _ D 6 /L C D _ P 6
L C D _ D 1 3 /L C D _ P 1 3
L C D _ D 7 /L C D _ P 7
L C D _ D 1 4 /L C D _ P 1 4
L C D _ D 8 /L C D _ P 8
IR Q _ P /S P I2 _ C S 2
L C D _ D 9 /L C D _ P 9
IR Q _ O /S P I2 _ C S 3
L C D _ D 1 0 /L C D _ P 1 0
IR Q _ N
L C D _ D 1 1 /L C D _ P 1 1
IR Q _ M
I2 S 1 _ D IN _ S C K
IR Q _ L
I2 S 1 _ D IN _W S
IR Q _ K
I2 S 1 _ D IN 1
IR Q _ J
I2 S 1 _ D O U T 1
IR Q _ I
L C D _ D 1 5 /L C D _ P 1 5
L C D _ D 1 8 /L C D _ P 1 8 /S D _ R X _ 0 +
L C D _D 1 6 /LC D _ P 1 6 /S D _ G N D
L C D _ D 1 9 /L C D _ P 1 9 /S D _ R X _ 0 L C D _D 1 7 /LC D _ P 1 7 /S D _ G N D
G N D _23
G N D _31
E B I_ A D 2 0 /L C D _ P 42 /S D _ G N D
E B I_ B E _ 3 2 _ 2 4 /L C D _ P 2 8 /S D _ T X _ 0 +
E B I_ A D 2 1 /L C D _ P 43 /S D _ G N D
E B I_ B E _ 2 3 _ 1 6 /L C D _ P 2 9 /S D _ T X _ 0 E B I_ A D 2 2 /L C D _ P 44 /S D _ R X _ 1 +
E B I_ B E _ 1 5 _ 8 /LC D _ P 3 0 /S D _ G N D
E B I_ A D 2 3 /L C D _ P 45 /S D _ R X _ 1 E B I_ B E _ 7 _ 0 /LC D _ P 3 1 /S D _ G N D
E B I_ A D 2 4 /L C D _ P 46 /S D _ G N D
E B I_ T S IZ E 0 /L C D _ P 3 2 /S D _ T X _ 1 +
E B I_ A D 2 5 /L C D _ P 47 /S D _ G N D
E B I_ T S IZ E 1 /L C D _ P 3 3 /S D _ T X _ 1 E B I_ A D 2 6 /L C D _ P 48 /S D _ R X _ 2 +
E B I_ T S /LC D _ P 3 4 /S D _ G N D
E B I_ A D 2 7 /L C D _ P 49 /S D _ R X _ 2 E B I_ T B S T /LC D _ P 3 5 /S D _ G N D
E B I_ A D 2 8 /L C D _ P 50 /S D _ G N D
E B I_ T A /L C D _ P 3 6 /S D _ T X _ 2 +
E B I_ A D 2 9 /L C D _ P 51 /S D _ G N D
E B I_ C S 4 /L C D _ P 3 7 /S D _ T X _ 2 E B I_ A D 3 0 /L C D _ P 52 /S D _ R X _ 3 +
E B I_ C S 3 /LC D _ P 3 8 /S D _ G N D
E B I_ A D 3 1 /L C D _ P 53 /S D _ R X _ 3 E B I_ C S 2 /LC D _ P 3 9 /S D _ G N D
L C D _ D 2 0 /L C D _ P 2 0 /S D _ G N D
E B I_ C S 1 /L C D _ P 4 0 /S D _ T X _ 3 +
L C D _ D 2 1 /L C D _ P 2 1 /S D _ R E F C L K +
G P IO 3 1 /L C D _ P 4 1 /S D _ T X _ 3 L C D _ D 2 2 /L C D _ P 2 2 /S D _ R E F C L K L C D _D 2 3 /LC D _ P 2 3 /S D _ G N D
G N D _24
G N D _32
3 .3 V _ 1 0
3 .3 V _ 1 4
P C I EX PR ES S T O W ER S Y ST EM
P R IM A R Y
P5V_ELEV
A
C1
C2
C3
C4
C5
C6
C7
C8
C9
C 10
C 11
C 12
C 13
C 14
C 15
C 16
C 17
C 18
C 19
C 20
C 21
C 22
C 23
C 24
C 25
C 26
C 27
C 28
C 29
C 30
C 31
C 32
C 33
C 34
C 35
C 36
C 37
C 38
C 39
C 40
C 41
C 42
C 43
C 44
C 45
C 46
C 47
C 48
C 49
C 50
C 51
C 52
C 53
C 54
C 55
C 56
C 57
C 58
C 59
C 60
C 61
C 62
C 63
C 64
C 65
C 66
C 67
C 68
C 69
C 70
C 71
C 72
C 73
C 74
C 75
C 76
C 77
C 78
C 79
C 80
C 81
C 82
C
B
SECO N D ARY
P 3 V 3 _R E G
C1
C2
10U F
10U F
A
IC A P C la s s ific a tio n :
D r a w in g T itle :
F C P : ___
F IU O : X
P U B I : ___
TW R _FL O W _M A G
P a g e T itle :
P add le w he e l a c c es ory boa rd - m a gne tic s ens or
5
4
3
2
S iz e
C
D ocum ent N um ber
D a te :
W ednes day , O c tober 01, 2014
Rev
x
S C H -28410 P D F : S PF -28410
She et
2
of
2
1
Figure 13. Elevator connector
Low-Power Rotation Sensing with Magneto Resistive Sensors and Kinetis L MCUs, Application Note, Rev. 0, 01/2015
Freescale Semiconductor, Inc.
15
How to Reach Us:
Information in this document is provided solely to enable system and software
Home Page:
freescale.com
implementers to use Freescale products. There are no express or implied copyright
Web Support:
freescale.com/support
information in this document.
licenses granted hereunder to design or fabricate any integrated circuits based on the
Freescale reserves the right to make changes without further notice to any products
herein. Freescale makes no warranty, representation, or guarantee regarding the
suitability of its products for any particular purpose, nor does Freescale assume any
liability arising out of the application or use of any product or circuit, and specifically
disclaims any and all liability, including without limitation consequential or incidental
damages. “Typical” parameters that may be provided in Freescale data sheets and/or
specifications can and do vary in different applications, and actual performance may
vary over time. All operating parameters, including “typicals,” must be validated for
each customer application by customer’s technical experts. Freescale does not convey
any license under its patent rights nor the rights of others. Freescale sells products
pursuant to standard terms and conditions of sale, which can be found at the following
address: freescale.com/SalesTermsandConditions.
Freescale, the Freescale logo, and Kinetis are trademarks of Freescale
Semiconductor, Inc., Reg. U.S. Pat. & Tm. Off. All other product or service names are
the property of their respective owners. ARM, the ARM Powered logo and Cortex are
registered trademarks of ARM Limited (or its subsidiaries) in the EU and/or elsewhere.
© 2015 Freescale Semiconductor, Inc.
Document Number: AN5047
Rev. 0
01/2015