Physics of climbing ropes

Viscoelastic Theory of Climbing Ropes
Version 2 (1.12.2010)
Ulrich Leuthäusser www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 1
1. Introduction
This work is intended to generalize the popular undamped harmonic oscillator (HO) model that is used to describe the elongation properties of climbing ropes. This is necessary as the simple HO equations for impact force, dynamic and static elongation, do not agree with the experimental values.
The HO model neglects energy dissipation in the climbing rope, i.e. the transformation of mechanical energy into thermal energy. However, this is an important characteristic of a climbing rope and therefore its viscoelastic properties have to be treated appropriately.
When a force is applied to the rope there is a delay in the response properties which is in contrast to the HO model. This delay results of relatively slow microscopic deformation processes of the elastomers in the rope. Thus, the full time history of the applied force is responsible for the instantaneous elongation of the rope. A state of non-equilibrium occurs and energy is absorbed which is finally transformed into heat.
This article shows how these irreversible processes can be treated appropriately. Special emphasis is laid on transparent analytical results. We give an equation of state for real climbing ropes which generalizes the equation of state of undamped ropes and which is able to explain the experimental relations between impact force and maximum elongation.
For a quick introduction into theory and applications of viscoelasticity we mention only two articles
1
; in addition there are excellent textbooks on this topic.
1 ocw.mit.edu/courses/materials-science-and-engineering/3.../visco.pdf www3.esc.auckland.ac.nz/...Viscoelasticity/.../Viscoelasticity_02_Examples.pdf www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 2
2. Model of a climbing rope
2.1 Macroscopic description of a climbing rope
A climbing rope behaves like an undamped oscillator when stretching starts. However, already before the first elongation maximum is reached, strong damping occurs. In the static case the rope shows an elongation behavior that relates to a spring constant different from the spring constant for short elongation times.
The simplest model that can explain these properties is a 3 parameter model, the Standard
Linear Solid Model (SLS) which is commonly used to describe elastomers. It was applied to climbing ropes by Pavier
2
without detailed calculations and is shown in the following picture: y1
η k2 k1 y2 m
The model is made up of a damped harmonic oscillator (DHO) (viscous damping η and spring k
1
in parallel) and another spring k
2 . y
1
is an unobservable variable and describes the inner friction.
This model is equivalent to a model that is made up of a series R
SLS n of n identical SLS:
… …
where R
SLS n
( k
1
, k
2
, η )
=
R
1
SLS
( k
1 n
, k
2 n
,
η n
) .
A rope made up of such a SLS material reminds of the linear chain model in solid state physics and describes the rope on a more microscopic level. Wave excitations in the rope can be modelled by considering the mass of the individual elements like in the linear chain.
2
M. Pavier, Experimental and theoretical simulations of climbing falls, Sports Engineering (1998) 1, 79-91 www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 3
The Lagrange function L and the dissipation function D for the system described above are given by:
L
=
T
−
V
=
1
2 m & 2
2
−
1 k
2
1 y
2
1
+
1
2 k
2
( y
2
− y
1
)
2 − mgy
2
, D
=
1
2
η & 2
1
The Lagrange functions d dt
∂
∂ L i
=
∂ L
∂ y i
−
∂ D
∂ y i
yield
η &
1 m & y &
2
+
+
( k
1 k
2
+
( y k
2
2
) y
1
− y
−
1
) k
2
= y
2 mg
=
0
These equations must be solved with the initial conditions y
1
( 0 ) = 0 , &
1
( 0 ) = 0 , y
2
( 0 ) = 0 , &
2
( 0 ) = v
0
, & y &
2
( 0 ) = g
(1)
Eliminating y
1
and introducing the spring constant K
= k
1 k
1 k
+
2 k
2
and the relaxation time
τ
= k
1
η
+ k
2
one gets
τ
⋅ ( m & y &
2
+ k
2 2
) ( m & y &
2
+
Ky
2
) = mg (2)
With this rope equation one can explain the available quantities from rope manufacturers such as maximum elongation, impact force, and static elongation and also the relations between them. In addition it is possible to determine the energy absorption of the rope.
The static elongation is immediately given by
F
= k
2
( y
2
− y
1
) climber is reduced by his weight and given by y
F stat
2
= mg
. The maximum tension F max
is called impact force. The force F
K
on the
K
= − m & y &
2
/ K
=
. The tension in the rope is
F
− mg .
The relaxation time τ of the inherent friction processes determines the relative strengths of the two oscillators within the brackets of equation (2). τ is of the order of the oscillation period, because the polymer molecules return only slowly to their equilibrium state.
Energy dissipation is a consequence of these irreversible processes.
In terms of viscoelastic theory the SLS is a Kelvin model with an additional spring in series:
σ
σ
1
2
=
= k
1
ε
1 k
2
ε
2
+
η ε &
1
Kelvin model (
Hooke’s law
σ
1
=
σ
11
+
σ
12
= k
1
ε
11
+
η ε &
12
= k
1
ε
1
+
η &
1
)
Because of the serial connection of the springs the tensions σ are equal and the elongations
ε add up to:
ε
=
ε
1
+
ε
2
σ
=
σ
1 and finally
=
σ
2
hence: σ
+ k
1
+ k
2
η
σ
− k
2
& − k
1 k
2
η
ε
=
0
= k
1
ε
−
σ k
2
+
η
ε & − k
2
(3) www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 4
Setting k
1
=0 leads to the Maxwell model: m & y &
2
= mg
−
σ
σ
=
η
ε & −
. With the replacements
and k
2
ε
= y
2
both equations become identical.
2.2 Phenomenological models with memory kernel
A different representation reveals the physical mechanism of the viscoelastic material.
Integration of the first equation of (1) and insertion into the second equation yields: m & y &
2
+ k
2 y
2
− k 2
2
η
∫ t
0 exp
−
( k
1
η
+ k
2
) ( t
− t '
)
y
2
( t ' ) dt '
= mg (4)
Thus the tension in the rope is not an instantaneous result of the momentary elongation
(like in the undamped case), but due to memory effects it is a result of the full time history of the elongation process given by eq. (4).
In a phenomenological description one could start with these general linear viscoelastic
Volterra equations
σ ( t )
=
G ( 0 ) ε ( t )
+
0 t
∫
( t
− t ' ) ε ( t ' ) dt ' and choose the memory kernel in a certain way. In our case the memory kernel is given by:
G ( t )
=
G (
∞
)
+ (
G ( 0 )
−
G (
∞
)
) e
− t / τ =
K
+
( k
2
−
K ) e
− t / τ . y
1
2.3 Limiting cases
1. For viscosity η = 0 one gets a HO with the two springs k
1
and k
2
in series, i.e. with a spring constant K. For viscosity η → ∞ one also gets a HO, but with spring constant k
2
.
2. For k
2
→ ∞ the second oscillator becomes infinitely stiff and one gets the Kelvin model which is the classical damped harmonic oscillator in physics:
= y
2
, η &
1
+ k
1 y
1
= k
2 y
2
− k
2 y
1
, m & y &
1
+
η &
1
+ k
1 y
1
= mg .
3. Spring constant k
1
= 0 gives: m & & &
2
+ m k
η
2
& y &
2
+ k
2 2
= m k
2 g . Integrating once over time t
η yields: m & y &
2
+ m k
η
2 2
+ k
2 y
2
=
C
+ m k
η
2 g
⋅ t . Time t=0 determines C: C
= mg
+ m k
η
2 v
0
and for times t <<
η
+ v
0 g
we get: k
2 m & y &
2
+ m k
η
2 2
+ k
2 y
2
= m k
η
2 v
0
+ mg
This is a DHO with an additional force m / η
⋅ k
2 v
0
that is added to gravity and is compensating friction. This equation will be solved exactly in section (2.7).
(5) www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 5
2.4 The rope as an undamped harmonic oscillator
As it was shown in the discussion of the limiting cases, one gets the HO for η=0 (k=K) as well as for η → ∞ (k=k
2
): m & y &
2
+ ky
2
= mg
This equation has to be solved with the initial conditions v(0)=v
0
and y(0)=0. The solution is: y
2
( t )
= g
ω
2
+
1
ω
2 v
2
0
⋅
ω
2 + g
2 sin
ω t
− arctan( v
0 g
ω
)
with ω
= k m
. (6a)
The maximum elongation occurs at time t
1
=
1
ω
π
2
+
arctan
g v
0
ω
and is y max
2
= g
ω 2
+
1
ω 2 v 2
0
⋅
ω 2 + g 2 . (6b)
A fall of the height h results in a fall velocity v
0
=
2 gh . For an available rope length L
(and therefore for a fall factor of f=h/L), an elasticity modulus E=Lk/q (q is the cross section of the rope) one gets the well-known formula for the maximum force F max = ky max
2 on the rope:
F max = mg
+
2 mghk
+ m 2 g 2 = mg
+
2 mgEqf
+ m 2 g 2 (7)
The impact force F max
only depends on the fall factor f, i.e. on the ratio h/L. The more rope is available, the softer the rope becomes ( k
∝
L
−
1
) which is just compensating the higher fall energy. The force F
K
on the climber is given by F
K
= k∙y
2
(t) – mg with a maximum of
F max
K
= max(
− m & y & )
= m v
2
0
⋅
ω
2 + g
2
.
If the rope were a HO, the spring constant k calculated from the static elongation would be equal to the spring constant of the dynamic elongation. For the HO the following relation is valid:
F max mg y stat y max
2
=
1 . However, for a typical climbing rope this ratio varies between a factor 2 and 3. Therefore it is not possible to describe the behavior of a rope by only one parameter for both very long and very short times.
Elimination of the spring constant k from equation (7) by means of F max = ky max
2
yields:
F max =
2 mg
Lf + y y max
2 max
2 =
2 mg
+ mv y max
2
2
0 (8a)
This is, of course, the law of conservation of energy, because it follows immediately:
1
2
F max y max
2
+ mgy max
2
=
E
0
(8b) www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 6
with E
0
= mgh as initial potential energy. Because eq. (8b) contains only known quantities, it should be valid for all ropes independent of their material parameters. Eq. (8b) also can be interpreted as the equation of state for climbing ropes without friction, as it is made up of observable quantities only. However, the calculated impact forces are significantly larger than the measured ones. For real climbing ropes with friction eqs. (8a) and (8b) are valid only with a less-than sign, because there is energy dissipation.
2.5 Exact results and numeric integration of the equations of motion
The rope equation (2) is best solved by means of a Laplace transformation. The inversion of the equation can be done exactly, but the roots of the equation of 3 rd
grade are very bulky.
Therefore we skip this exact solution and rather show the numeric integration.
All following results are based on the standard UIAA fall conditions:
A height h of fall of 2 x 2.3m with an available rope length L=2.6m leads to a fall factor f=h/L= 1.77 and a fall velocity v
0
=
2 gh
=
9 .
5 m / sec at the end of falling the distance h.
The mass m used in the fall is m=80kg. For the rope we use typical parameters of a
”generic“ rope: y stat
/ L
=
0 .
08 , k
2
=
14000 [ N / m ], η
=
2500 [ kg / sec]
This leads to the following quantities: k
1
= 5165 [ N / m ], τ = 0 .
13 [ sec ], K = 3773 [ N / m ]
1.5
1 y2 n 0.5
y1 n
0 y2_K n
ε.
) y2_k2 n
ε.
)
0.5
1
1.5
0 0.05
0.1
0.15
0.2
0.25
ε .
n
0.3
0.35
0.4
0.45
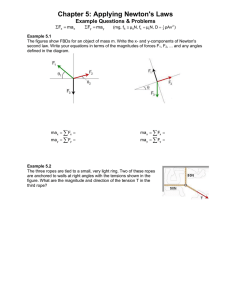
The figure above shows the rope elongation y
2
(red) and the inner coordinate y
1
(blue) together with the HOs with spring constant K (black) und k
2
(magenta). The exact curve of y
2
lies between these two HOs and returns to zero after 0.35 sec due to friction with almost no oscillations. www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 7
100
50
( a2 ) n1 y2 n1
.
100 v2 n1
.
10
0
50
100
0 0.1
0.2
0.3
0.4
0.5
ε
.
n1
The figure above shows the acceleration of mass m (red), the scaled velocity (black) and the rope elongation y
2
(blue) as a function of time. Note the phase shift between elongation and acceleration.
The absorbed energy can be determined by means of y
1
and is given by
E
A
( t )
=
0 t
∫
η
⋅ y
2
1 dt .
In the following diagram E
A
(in relation to the initial energy) is shown as a function of time.
1.5
Edissi i
E
1
0.5
1
0
0.5
0 0.2
0.4
0.6
0.8
i
.
ε
For small times it increases only with t
3
: E
A
( t ) ~
1
3 k
2
2 v 2
0
η t
3 +
O ( t
4
)
1 www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 8
The following tension-elongation diagram shows a hysteresis curve where the dissipated energy is given by the enclosed area.
100
( a2 ) n1
50
0
50
0 0.2
0.4
0.6
0.8
1 y2 n1
2.6 Response behavior of the climbing rope
The dynamic susceptibility determines the frequency dependent response to an external force. In the following diagrams we show the real and imaginary parts of the susceptibility for the discussed systems (complex z
=
ω
+ i ε with ε
→
0 ).
For the DHO m & y &
2
+
2 κ &
2
+ ky
2
=
0 one gets
χ
DHO
( z )
=
− z
2 −
1 / m iz 2 κ
+
ω
2
2
with the HO in the limiting case κ=0.
The susceptibility of the rope as a SLS is given by ( κ
=
1
2 m ω
2
2
η
):
χ ( z )
=
1 m
− z
2 +
ω
2
2
1
−
2 κ ( ω
1
2
2 κω
4
2
+
ω
2
2
)
− iz ω
2
2 with the limiting case ω
1
2 =
0 from chapter 6. www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 9
6 10
4
χ
HOR (
ω ,
0.001
)
(
,
0.001
)
χ
HO (
ω ,
0.001
)
χ
0 (
ω ,
0.001
)
4 10
4
2 10
4
0
0 5 10 15 20 25 30
ω
Fig.: Real parts of the dynamic susceptibilities of the HO (black), the DHO (red), the rope as SLS (blue) and in the approximation k
1
=0 (magenta). Note that the maximum of the susceptibility is at ω=0 and therefore equal to the static susceptibility χ(0)=1/K .
The absorbing part of the susceptibility ω
⋅
Im( χ ( ω )) is proportional to the average absorbed power (see next diagram). Energy dissipation is a result of the phase shift between force and response of the rope.
0.0025
0.002
Im ( χ HOR ( ω ,
0.00001
) )
.
ω
Im ( (
,
0 ) )
.
ω
Im (
χ
HO (
ω ,
0.001
) )
.
ω
Im (
χ
0 (
ω ,
0 ) )
.
ω
0.0015
0.001
5 10
4
0
0 5 10
ω
15 20 25 30 www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 10
2.7 The rope equation as Maxwell model: the exact solution of equation (5)
The expansion of y
2 for short times is done by expanding the Laplace transformed y
2
in small 1/s. After inverting back one gets: y
2
( t )
= v
0 t
− v
0 k
2 m t
3
3 !
+ v
0 k
2
2 m η t
4
4 !
+ v
0
k
2
2 m 2
− k
2
2
( k
1
+ m η 2 k
2
)
t
5
5 !
+
O ( t 6 ) k
1
appears for the first time in the term of order t
5
. With typical quantities for the parameters k
1
, τ, and K of page 7 it is of order v
0 k
2
2
⋅ k
1
η
2 m t
5
5
1
!
~ 0 .
01 , while y
2
(t
1
)~1 .
1 y2 n
0.5
0
0 0.05
0.1
n
0.15
.
ε , t
, t
0.2
0.25
Fig.: red = exact curve, blue = y2 st
, black = y2 st for k1=0
Because there is virtually no dependency on k
1
until the first elongation maximum, we take a closer look at the approximation k
1
= 0. This allows to formulate simple and exact results. Equation (5) is: m & y &
2 a
+ m k
η
2 2 a
+ k
2 y
2 a
= m k
η
2 v
0
+ mg
(5a)
ω
2
2
= k
2 m
, κ
= k
2
2 η
With these two definitions on gets:
& y &
2 a
+
2 κ y
2 a
+
ω 2
2 y
2 a
=
2 κ v
0
+ g (5b)
The exact solution is: y
2 a
( t )
= y
∞
+ e
−
κ t
Ω
1
2
( v
0
−
κ y
∞
)
2
Ω
2 + y
2
∞
Ω
4 sin
Ω t
− arctan
v
0 y
−
∞
Ω
κ y
∞
(9) with y
∞
= m v
0
η
+ g
ω 2
2
=
2 κ v
0
ω 2
2
+ g
ω 2
2
and Ω 2 =
ω 2
2
−
κ 2 . www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 11
For κ=0 one gets again the result of the HO of equation (6).
Friction reduces the frequency only a little bit (with the parameters given above) which means that one is not yet close to the aperiodic limiting case.
Note that the term 2 κ v
0
in eq. (5) is responsible for the observed small initial acceleration
& y & ( 0 )
= g , in contrast to the large initial acceleration of the Kelvin model.
We skip the lengthy formula for the acceleration & y &
2 a
( t ) that is calculated from eq. (9).
1 y2a n
ε.
)
0.5
y2 n
0
0.5
0 0.05
0.1
0.15
0.2
n
ε.
0.25
0.3
0.35
100
50 a2a n
ε.
) a2 n
0
50
100
0 0.05
0.1
0.15
0.2
0.25
0.3
n
ε.
The figures above compare the elongation and the acceleration of eq. (5) (blue) with the exact results of eq. (2) (red).
The maximum elongation occurs at time t
1
given by: t
1
=
1
Ω arctan
v
0 y
−
∞
Ω
κ y
∞
+ arctan
Ω
κ
≈
1
ω
2
κ
ω
2
+
π
2
+ g v
0
ω
2
The phase shift between elongation and tension is δ
≅
2 κ
ω
2
+
O ( κ 3 ) which means that the moment of the impact force occurs earlier by ∆ t
=
2
ω
κ
2
2
. The phase shift can easily be www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 12
measured and is a very direct instrument to get information on the viscous properties of the rope.
In order to compare the above results with those of the HO we give some relations that are correct to 1st order in the parameter κ / ω
2
.
Expansion in small times around the maxima of elongation and acceleration yields the relation
F max
2 a ≅ −
2 κ v
0
+
ω
2
2
⋅ y max
2 a
(10) m
Unlike in the HO case it is no longer possible to determine the period ω
2
simply by means of impact force and maximum elongation.
The absorbed energy E
A
, which is transformed into heat until time t
1
of the maximum elongation point, is given by:
E
A
( t
1
)
=
1
2 mv
2
0
−
1
2 k
2
( y
2 a
( t
1
)
− y
1 a
( t
1
))
2 − mgy
2 a
( t
1
)
y
1a
(t
1
) can be determined in the following way: Because elongation point, it follows & y &
2 a
( t
1
)
=
2 κ v
0
2 a
( t
1
)
=
0 at the maximum
+ g
−
ω
2
2 y
2 a
( t
1
) . At the same time (see eq. (1)) there is also y
1 a
( t
1
)
= y
2 a
( t
1
)
+
1
ω
2
2 obtains to 1st order in κ:
E
A
( t
1
)
≅
1
2 mv
2
0
−
1
2 m ω
2
2
( )
2
( & y &
2 a
( t
1
)
− g ) , which yields y
1 a
( t
1
)
=
+ mgy max
2 a
+
2 m κ v
0 y max
2 a
Because of y
2 a
~ t and y
1 a
~ t
2
the relation
2 κ v
0
ω
2
2
. With this one
(11) y
2 a
( y
1 a
)
≅ y max
2 a
E
A
( t
1
)
=
0 t
1
∫
η
⋅ & y
2
1 a dt y
1 a y
1 a
( t
1
)
≅
is valid for small times, E
A
can be calculated in an approximation: y
1
(
∫ t
1
) k
2 y
2 a dy
1 a
0
=
4
3 m κ v
0 y max
2 a
.
So we get an equation for y max
2
alone:
1 m ω
2
2
( )
2 − mgy max
2 a
− ≅
2
2
3 m κ v
0 y max
2 a
1
2 mv
2
0 or by means of eq. (10):
F max
2 a
=
2 mg
+ mv
2
0 y max
2 a
−
2
3 m κ v
0 which has to be compared with eq. (8).
(12)
(13) www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 13
This equation still contains the friction constant κ which cannot directly be observed, and thus it is not as universal as equation (8).
When κ is expressed in terms of ∆t, the easily accessible phase shift between maximum elongation and impact force, one gets the following equation of state for real climbing ropes:
F max
1
+
1
3 y v
0 max −
⋅
∆ v
0 t
⋅
∆ t
=
2 mg
+ mv y
2
0 max
(14) with ∆ t
=
2 κ / ω
2
2
= m / η .
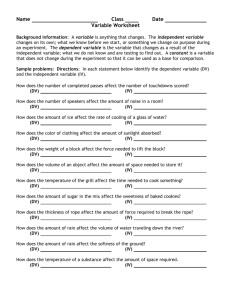
The following diagram shows equation (13). From it the friction constant κ can be read off for a certain rope.
11,8
10,8
9,8 exp. values kappa =3,1
HO: kappa=0 kappa=2,2 kappa=3,7 kappa=4,6
8,8
7,8
6,8
5,8
2,5 2,7 2,9 3,1
1/(rel. elongation)
3,3 3,5 3,7
Fig.: Impact force as a function of elongation
-1
for different κ’s. κ reduces the impact force with respect to the undamped harmonic oscillator HO (red). κ's of real ropes (blue diamonds) lie between 2.2 and 4.6.
The period ω
2
can be expressed only by y max
2 a and F max
2 a
by means of eqs. (10) and (12). It is given by:
ω
2
2
=
1 y max
2 a
6 g
−
2
F max
2 a m
+
3 v
2
0 y max
2 a
.
One gets the result of the HO in the limiting case
ω
2 =
1 / y max
(
2 g
+ v
2
0
/ y max
F max
2 a
= m ω
2
2
, that is
)
. Because κ can also be calculated from eq. (13), we are now www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 14
able to calculate the material parameters of the rope exclusively from available quantities from rope manufacturers.
Finally we derive the expressions for y max
2 a and F max
2 a
. As eq. (12) is the law of conservation of energy, one gets the y max
2 of eq. (6b) for κ=0. The substitution g
+
2
κ v
0
→ g in eq.
3
(12) leads to the same equation as for κ=0, and thus one can immediately write down the solution for y max
2 a with the modified g: y max
2 a
≅ g
+
2
3
ω
2
2
κ v
0
+
1
ω
2
2 v
2
0
⋅
ω
2
2
+
( g
+
2
3
κ v
0
)
2
Inserting y max
2 a into eq. (10) gives the impact force
(15)
F max
2 a
≅ mg
+ m v
2
0
⋅
ω
2
2
+
( g
+
2
3
κ
ω
2
v
0
ω
2
)
2 −
4
3
m
κ
ω
2
v
0
ω
2
(16)
κ leads to an increase of the elongation and a decrease of the impact force compared to the HO. It is interesting to note that κ / ω
2
changes the scaling properties of the undamped situation. As ω
2
2
~ 1 / L and v
0
2
~ L it follows ω
2 v
0
~ 1 , hence the independency of L.
Because η ~ 1 / L , κ is independent of L and therefore
κ
~ L applies. An increase in
ω
2 the rope length L (keeping f constant) leads to a decrease in the impact force (see the following diagram) which is in contrast to the unchanged impact force of the HO.
9000
8000
Fangst0 L )
(
, κ
)
7000
6000
5000
0 5 10 15 20 25
Fig.: Influence of κ on the impact force at constant fall factor f=2. red = impact force of the HO, blue = impact force with friction www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 15
The impact force at constant rope length as a function of fall height (0<h<2L) is shown in the following graph.
1.2 10
4
1 10
4
8000
(
, κ
)
F h 0 )
6000
4000
2000
0
0 2 4 6 8 10 12 14 h
Fig.: Impact force as a function of fall height at constant rope length L=6.9m compared with the impact force without friction (red)
The short time average of the dissipated energy E
A
( t )
=
1
2 mv
2
0
(
1
− e
−
2 κ t
)
gives a relation between κ and time T
1 / 2
= ln( 2 )
when half of the energy is dissipated. It is shown below
2 κ together with the un-averaged E
A
( t ) using a logarithmic scale:
4000
3000
Edissi n
E
1
.
1 e n
ε.
.
k2
η
2000
1000
0
0 T
1/2
0.2
0.4
0.6
0.8
1 n
ε.
Fig.: blue = average dissipated energy as a function of time; red = un-averaged dissipated energy
With the values of section 2.5 for the ”generic“ rope we get for the quantities in this chapter:
κ
=
2 .
8 [sec
−
1
], ∆ t
=
0 .
032 [sec], κ / ω
2
=
0 .
212 , t
1
=
0 .
141 . www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 16
2.8 Numerical inversion of the rope equations for the determination of the rope parameters
The exact equations (1) yield relations of the form
F max y max
=
= f
( k g
( k
1
1
, k
, k
2
2
, η
, η
)
)
and for the 3 material parameters k
1
, k
2
and η.
In the following table these material parameters have been determined for some ropes of various manufacturers.
δ= E
A
(t
1
)/ E
0 is the relation between dissipated energy E
A
(t
1
) at time t
1
of the elongation maximum and the initial energy E
0
. t
2
is the time of maximum impact force.
The last line shows the average values of each row.
Imp. force
[N] max. elong. stat. elong. k
2
[N/m] k
1
[N/m] k
2
/k
1
K
[N/m]
ω
2
[1/s] η
[kg/s]
κ / ω
2
κ
[1/s] t
2
(F max
) t
1
(y
2 max
)
∆ t = t
1
-t
2
δ τ
7100 38,0% 9,7% 11960 4206
7350 38,0% 9,6% 11340 4350
7400 37,0% 9,5% 12160 4301
7550 37,0% 10,0% 11780 4058
7600 35,0% 7,6% 14020 5541
7700 37,0% 9,5% 11480 4393
8000 34,0% 7,4% 14140 5733
8400 32,5% 7,5% 15060 5492
8700 33,0% 9,0% 13700 4441
8800 31,1% 7,6% 16140 5268
8900 33,0% 9,1% 13340 4415
9100 29,0% 6,8% 19160 5777
9200 30,0% 7,0% 16940 5785
9300 30,0% 6,8% 16720 6043
9300 29,0% 7,2% 18520 5419
9500 29,0% 7,0% 17980 5673
2,84 3112
2,61 3144
2,83 3177
2,90 3018
2,53 3972
2,61 3177
2,47 4079
2,74 4025
3,08 3354
3,06 3972
3,02 3317
3,32 4439
2,93 4312
2,77 4439
3,42 4192
3,17 4312
11,83 1640 0,29 3,65 0,123 0,170 0,047 0,630 0,101
11,54 1980 0,23 2,86 0,128 0,167 0,039 0,565 0,126
12,02 1880 0,26 3,23 0,123 0,164 0,041 0,597 0,114
11,83 2140 0,22 2,75 0,126 0,162 0,036 0,559 0,135
12,82 1700 0,30 4,12 0,114 0,157 0,043 0,607 0,087
11,70 2400 0,20 2,39 0,129 0,161 0,032 0,510 0,151
12,97 2040 0,25 3,47 0,114 0,151 0,037 0,565 0,103
12,97 2320 0,22 3,25 0,110 0,144 0,034 0,552 0,113
12,89 3240 0,16 2,11 0,118 0,143 0,025 0,449 0,179
12,89 2580 0,20 3,13 0,107 0,137 0,030 0,539 0,121
12,75 3880 0,13 1,72 0,121 0,142 0,021 0,388 0,219
15,15 2340 0,26 4,09 0,096 0,129 0,033 0,592 0,094
14,55 2900 0,20 2,92 0,105 0,132 0,027 0,504 0,128
14,25 3100 0,18 2,70 0,106 0,131 0,025 0,475 0,136
14,96 2680 0,22 3,46 0,099 0,128 0,029 0,551 0,112
14,99 3060 0,20 2,94 0,101 0,127 0,026 0,498 0,129
8532 33% 8,00% 15081 5167 2,92 3842 13,34 2590 0,21 3,02 0,11 0,14 0,03 0,53 0,13
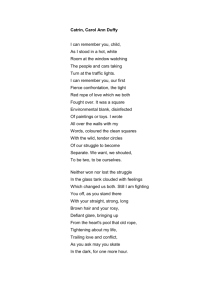
As expected, k
1
and k
2
show a strong correlation with a correlation coefficient ρ(k
1
,k
2
)=
0.83. In the following graph k
2
is shown as a function of k
1
. The ratio k
2
/k
1
is about 3 for all ropes. The correlations between η and k
1
resp. η and k
2
are not significant. www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 17
25000
20000
15000
10000
5000
0
0 1000 2000 3000 4000 5000 6000 7000 k1[N/m ]
Fig.: Relation between k
1
and k
2
by means of the regression line k
2
(k
1
)=2,92∙k
1
.
3. Summary and implications
In this work we set up the equation of motion for a climbing rope on basis of the viscoelastic Standard Linear Solid Model. It allows a good description of a climbing rope. In order to get transparent relations between rope parameters and measured quantities, the analysis of the equation of motion was mostly done analytically. In a good approximation we derived easy expressions for the maximum elongation and the impact force which are able to explain the observed differences in the HO description.
The parameter-free form of the impact force of the HO, F max =
2 mg
+ sort of an equation of state, has to be reduced by a friction term
− mv
2
0
/ y max
2
, which is a
2 / 3 m κ v
0 in order to explain the measurements of maximum elongation and impact force. Crucial for the rope description is the friction constant κ. It leads to an additional elongation, a reduction of the impact force, and to energy dissipation. In the diagram on page 14 κ can be read off directly for different ropes at given values of impact force and maximum elongation, or κ can be calculated directly from equation (13).
In principle a climber desires a rope that stretches as little as possible, has a small impact force, and absorbs energy well (then it will last longer and oscillate little after a fall). A simultaneous optimization of all criteria obviously is not possible because of trade-offs.
Using the diagram on page 14 and allowing a tolerable upper limit of the impact force that must not be exceeded, one will move to the right on this horizontal line in order to minimize the elongation. On the other hand, allowing an upper limit for the elongation in form of a vertical line, the impact force is minimized by moving down on this line. In both cases one ends up on a straight line which is characterized by a κ as large as possible.
Large κ seem to be relevant for optimal climbing ropes. It is interesting to note that the inner friction of the rope violates the scale invariance, i.e. the dependency of the impact www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 18
force only on the fall factor. Friction leads to a decrease in the impact force when both rope length and fall height are increased by the same factor.
There are three relevant points in this work. First, the equation of motion of the climbing rope (2), a differential equation of 3 rd
order which is made up of 2 oscillators whose relative strength is controlled by a relaxation time. Second, the equations of state (13, 14) which allow to describe all ropes in a universal way once the impact force, the maximum elongation and the phase shift are known. Third, the equation (16) for the impact force which generalizes the results of the classical HO model of a rope. www.SigmaDeWe.com
© 2010 Leuthäusser Systemanalysen page 19