and CTr
advertisement

Comput. Methods Appl. Math. 2016; 16 (2):277–298
Research Article
Svetlana Matculevich* and Sergey Repin
Explicit Constants in Poincaré-Type
Inequalities for Simplicial Domains and
Application to A Posteriori Estimates
DOI: 10.1515/cmam-2015-0037
Received October 20, 2015; revised December 5, 2015; accepted December 10, 2015
Abstract: The paper is concerned with sharp estimates of constants in the classical Poincaré inequalities
and Poincaré-type inequalities for functions with zero mean values in a simplicial domain or on a part of
the boundary. These estimates are important for quantitative analysis of problems generated by differential
equations where numerical approximations are typically constructed with the help of simplicial meshes. We
suggest easily computable relations that provide sharp bounds of the respective constants and compare these
results with analytical estimates (if such estimates are known). In the last section, we discuss possible applications and derive a computable majorant of the difference between the exact solution of a boundary value
problem and an arbitrary finite dimensional approximation defined on a simplicial mesh.
Keywords: Poincaré-Type Inequalities, Sharp Estimates of Eigenvalues, A Posteriori Error Control
MSC 2010: 65N15, 65N25, 65N35
1 Introduction
Let T be an open bounded domain in ℝd (d ≥ 2) with Lipschitz boundary ∂T. It is well known that the Poincaré
inequality [31, 32]
‖w‖T ≤ CPT ‖∇w‖T
(1.1)
holds for any
̃ 1 (T) := {w ∈ H 1 (T) | {|w|}T = 0},
w∈H
1
where ‖w‖T denotes the norm in L2 (T), {|w|}T := |T|
∫T w dx is the mean value of w, and |T| is the Lebesgue
P
measure of T. The constant C T depends only on T and d.
Poincaré-type inequalities also hold for
̃ 1 (T, Γ) := {w ∈ H 1 (T) | {|w|}Γ = 0},
w∈H
where Γ is a measurable part of ∂T such that measd−1 Γ > 0 (in particular, Γ may coincide with the whole
̃ 1 (T, Γ), we have two inequalities similar to (1.1). The first one,
boundary). For any w ∈ H
‖w‖T ≤ CPΓ ‖∇w‖T ,
(1.2)
can be viewed as a form of the Poincaré inequality (1.1), which is stated for a different set of functions. Obviously, (1.2) holds with a different constant CPΓ (CPT ≤ CPΓ ). The constant CPΓ is associated with the minimal
*Corresponding author: Svetlana Matculevich: Department of Mathematical Information Technology, University of Jyväskylä,
P.O. Box 35, FI-40014 University of Jyväskylä, Finland, e-mail: svetlana.v.matculevich@jyu.fi
Sergey Repin: V. A. Steklov Institute of Mathematics in St. Petersburg, Fontanka 27, 191011 St. Petersburg, Russia; and
Department of Mathematical Information Technology, University of Jyväskylä, P.O. Box 35, FI-40014 University of Jyväskylä,
Finland, e-mail: repin@pdmi.ras.ru
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
278 | S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities
positive eigenvalue of the problem
−∆u = λu
{
{
{
∂ u = λ{|u|}Ω
{
{ n
{
{ ∂n u = 0
in T,
(1.3)
on Γ,
on ∂T\Γ.
We note that inequalities of this type arose in finite element analysis many years ago (see, e.g., [2]), where
(1.2) was considered for simplexes in ℝ2 . The second inequality,
‖w‖Γ ≤ CTr
Γ ‖∇w‖T ,
(1.4)
̃ 1 (T, Γ) on Γ. It is associated with the minimal nonzero eigenvalue of the problem
estimates the trace of w ∈ H
−∆u = 0
{
{
{
∂ n u = λu
{
{
{
{ ∂n u = 0
in T,
(1.5)
on Γ,
on ∂T\Γ.
Problem (1.5) is a special case of the Steklov problem [38] where the spectral parameter appears in the boundary condition. Sometimes (1.5) is associated with the so-called sloshing problem, which describes oscillations of a fluid in a container. Eigenvalues and eigenfunctions of the sloshing problem have been studied in
[3, 12, 13, 16–18] and some other papers cited therein.
P
Exact values of CPΓ , CTr
Γ , and C T are important from both analytical and computational points of view.
Poincaré-type inequalities are often used in analysis of nonconforming approximations (e.g., discontinuous
Galerkin or mortar methods), domain decomposition methods (see, e.g., [11, 15, 39]), a posteriori estimates
[36], and other applications related to quantitative analysis of partial differential equations. Analysis of interpolation constants for piecewise constant and linear interpolations over triangular finite elements can be
found in [22]. Finally, we note that [7] introduces a method of computing lower bounds for the eigenvalues of
the Laplace operator based on nonconforming (Crouzeix–Raviart) approximations. This method yields guaranteed upper bounds of the constant in the Friedrichs’ inequality.
It is known (see [29]) that for convex domains
CPT ≤
diam(T)
.
π
For triangles this estimate was improved in [21] to
CPT ≤
diam(T)
,
j1,1
where j1,1 ≈ 3.8317 is the smallest positive root of the Bessel function J1 . Moreover, for isosceles triangles it
P,∆
was shown that CPT ≤ C T , where
1
P,∆
CT
{
{
{ j1,1
:= diam(T) {min{ j 1 , j 1 (2(π − α) tan( 2α ))−1/2 }
1,1
0,1
{
{ 1
−1/2
−
α) tan( 2α ))
(2(π
{ j0,1
α ∈ (0, 3π ],
α ∈ ( 3π , 2π ],
α∈
( 2π ,
(1.6)
π).
Here, j0,1 ≈ 2.4048 is the smallest positive root of the Bessel function J0 . A lower bound of CPT for convex
domains in ℝ2 was derived in [9]. It reads
diam(T)
.
(1.7)
CPT ≥
2j0,1
For triangles, the lower bound [20]
P
(1.8)
4π
(where P is the perimeter of T) may improve (1.7) in certain cases.
In [28], exact values of CPΓ and CTr
Γ are found for parallelepipeds, rectangles, and right triangles. Subsequently, we exploit the following two results:
CPT ≥
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities |
279
1. If T is based on vertexes A = (0, 0), B = (h, 0), C = (0, h) and Γ := {x1 ∈ [0, h], x2 = 0} (i.e., Γ coincides
with one of the legs of the isosceles right triangle), then
CPΓ =
h
ζ0
and
CTr
Γ =(
1/2
h
ζ0̂ tanh(ζ0̂ )
)
,
where ζ0 and ζ0̂ are unique roots in (0, π) of the equations
z cot(z) + 1 = 0 and
tan(z) + tanh(z) = 0,
(1.9)
respectively.
2. If T is based on vertexes A = (0, 0), B = (h, 0), C = ( 2h , 2h ) and Γ coincides with the hypotenuse of the
isosceles right triangle, then
h
h 1/2
CPΓ =
and CTr
.
Γ =( )
2ζ0
2
It is worth noting that values of CTr
Γ for right isosceles triangles follow from the exact solutions of the
Steklov problem related to the square. This specific case was mentioned in the work [13].
Exact value of constants in the classical Poincaré inequality are also known for certain triangles:
̂ π/3 based on vertexes  = (0, 0), B̂ = (1, 0), Ĉ = ( 1 , √3 ), the constant
1. For the equilateral triangle T
2 2
CPT,π/3
=
̂
3
4π
is derived in [30].
̂ π/2 based
̂ π/4 based on vertexes  = (0, 0), B̂ = (1, 0), Ĉ = ( 1 , 1 ) and T
2. For the right isosceles triangles T
2 2
on  = (0, 0), B̂ = (1, 0), Ĉ = (0, 1), we have
CPT,π/4
=
̂
1
√2π
and
CPT,π/2
=
̂
1
,
π
respectively. Proofs can be found in [14] and [27].
Explicit formulas of the same constants for certain three-dimensional domains are presented in papers
[4] and [14].
P
The above mentioned results form a basis for deriving sharp bounds of the constants CPΓ , CTr
Γ , and C T
for arbitrary non-degenerate triangles and tetrahedrons, which are typical objects in various discretization
P
methods. In Section 2, we deduce guaranteed and easily computable bounds of CPΓ , CTr
Γ , and C T for trianguP
Tr
lar domains. The efficiency of these bounds is tested in Section 3, where C Γ , C Γ are compared with lower
bounds computed numerically by solving a generalized eigenvalue problem generated by Rayleigh quotients
discretized over sufficiently representative sets of trial functions. In the same section, we make a similar comparison of numerical lower bounds related to the constant CPT with obtained upper bounds and existing estimates known from [9, 20, 21]. Lower bounds of the constants presented in Section 3 have been computed
by two independent codes. The first code is based on the MATLAB Symbolic Math Toolbox (www.mathworks.
com/products), and the second one uses The FEniCS Project [23]. Section 4 is devoted to tetrahedrons. We
combine numerical and theoretical estimates in order to derive two-sided bounds of the constants. Finally, in
Section 5 we present an example that shows one possible application of the estimates considered in previous
sections. Here, the constants are used in order to deduce a guaranteed and fully computable upper bound
of the distance between the exact solution of an elliptic boundary value problem and an arbitrary function
(approximation) in the respective energy space.
2 Majorants of C ΓP and C ΓTr for Triangular Domains
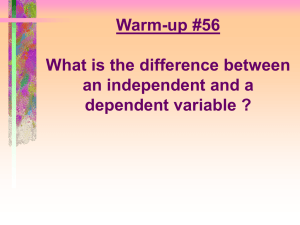
Let T be based on vertexes A = (0, 0), B = (h, 0), and C = (hρ cos α, hρ sin α) and
Γ := {x1 ∈ [0, h]; x2 = 0},
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
280 | S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities
x2
C(hρ cos α, hρ sin α)
α
A(0, 0)
T
x1
B(h, 0)
Γ
Figure 1. Simplex in ℝ2 .
where ρ > 0, h > 0, and α ∈ (0, π) are geometrical parameters that fully define a triangle T (see Figure 1).
Easily computable bounds of CPΓ and CTr
Γ are presented in Lemma 2.1 below, which uses mappings of reference
triangles to T and well-known integral transformations (see, e.g., [10]).
̃ 1 (T, Γ), the estimates
Lemma 2.1. For any w ∈ H
‖w‖T ≤ CPΓ h‖∇w‖T
1/2
and ‖w‖Γ ≤ CTr
‖∇w‖T
Γ h
(2.1)
hold with
CPΓ ≤ CPΓ = min{𝛾Pπ/2 CPΓ,π/2
, 𝛾Pπ/4 CPΓ,π/4
}
̂
̂
Tr
Tr
Tr
Tr
CTr
, 𝛾Tr
},
̂
̂
Γ ≤ C Γ = min{𝛾π/2 C Γ,π/2
π/4 C Γ,π/4
and
respectively. Here,
𝛾Pπ/2 = μ1/2
π/2 ,
−1/2 P
𝛾Tr
𝛾π/2 ,
π/2 = (ρ sin α)
𝛾Pπ/4 = μ1/2
π/4 ,
−1/2 P
𝛾Tr
𝛾π/4 ,
π/4 = (2ρ sin α)
where
1
(1 + ρ2 + (1 + ρ4 + 2ρ2 cos 2α)1/2 ),
2
1/2
μ π/4 (ρ, α) = 2ρ2 − 2ρ cos α + 1 + ((2ρ2 + 1)(2ρ2 + 1 − 4ρ cos α + 4ρ2 cos 2α)) ,
μ π/2 (ρ, α) =
(2.2)
(2.3)
and
CPΓ,π/2
≈ 0.49291,
̂
CTr
≈ 0.65602,
̂
Γ,π/2
CPΓ,π/4
≈ 0.24646,
̂
CTr
≈ 0.70711,
̂
Γ,π/4
where
Γ̂ := {x1 ∈ [0, 1]; x2 = 0}.
̂ π/2 → T with
Proof. Consider the linear mapping Fπ/2 : T
x = Fπ/2 (x)̂ = B π/2 x,̂
B π/2 = (
h
0
ρh cos α
),
ρh sin α
det B π/2 = ρh2 sin α.
(2.4)
̂ we have the estimate
̃ 1 (T
̂ π/2 , Γ),
For any ŵ ∈ H
̂ T̂ π/2 ≤ CP̂
̂ T̂ π/2 ,
‖w‖
‖∇w‖
Γ,π/2
(2.5)
P
̂ π/2 based on  = (0, 0), B̂ = (1, 0), and
where C Γ,π/2
is the constant associated with the basic simplex T
̂
Ĉ = (0, 1), Note that
1
̂ 2̂ =
‖w‖
‖w‖2T ,
(2.6)
T π/2
ρh2 sin α
and
̂ 2̂
‖∇w‖
T
π/2
≤
1
ρh2 sin α
∫ A π/2 (h, ρ, α)∇w ⋅ ∇w dx,
T
where
A π/2 (h, ρ, α) = h2 (
1 + ρ2 cos2 α
ρ2 sin α cos α
ρ2 sin α cos α
).
ρ2 sin2 α
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
(2.7)
S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities |
281
It is not difficult to see that
λmax (A π/2 ) = h2 μ π/2 (ρ, α),
μ π/2 (ρ, α) =
1
(1 + ρ2 + (1 + ρ4 + 2 cos 2αρ2 )1/2 ),
2
where μ π/2 (ρ, α) is defined in (2.2). From (2.5), (2.6), and (2.7), it follows that
‖w‖T ≤ 𝛾Pπ/2 CPΓ,π/2
h‖∇w‖T ,
̂
𝛾Pπ/2 (ρ, α) = μ1/2
π/2 (ρ, α).
(2.8)
̂ yields
̃ 1 (T,
̂ Γ)
Notice that ŵ ∈ H
̂ dŝ = h ∫ ŵ dŝ = 0.
{|w|}Γ := ∫ w(x) ds = h ∫ w(x(x))
̂
Γ
̂
Γ
Γ
̂ we
̃ 1 (T, Γ). In view of inequality (1.4), for any ŵ ∈ H
̃ 1 (T
̂ π/2 , Γ)
Therefore, the above mapping keeps w ∈ H
have
̂ Γ̂ ≤ CTr
̂ T̂ π/2 ,
‖w‖
‖∇w‖
̂
Γ,π/2
Tr
̂ π/4 based on  = (0, 0), B̂ = (1, 0), and
where C Γ,π/2
is the constant associated with the reference simplex T
̂
1 1
̂
C = ( 2 , 2 ). Since
1
̂ 2̂ = ‖w‖2Γ ,
‖w‖
Γ
h
we obtain
μ π/2 (ρ, α) 1/2
Tr
h1/2 ‖∇w‖T , 𝛾Tr
‖w‖Γ ≤ 𝛾Tr
(2.9)
) .
̂
π/2 C Γ,π/2
π/2 (ρ, α) = (
ρ sin α
Now, we consider the mapping
x = Fπ/4 (x)̂ = B π/4 x,̂
B π/4 = (
h
0
2ρh cos α − h
),
2ρh sin α
det B π/4 = 2ρh2 sin α,
̃ 1 (T, Γ):
which yields another pair of estimates for the functions in H
𝛾Pπ/4 (ρ, α) = μ1/2
π/4 (ρ, α),
h‖∇w‖T ,
‖w‖T ≤ 𝛾Pπ/4 CPΓ,π/4
̂
Tr
‖w‖Γ ≤ 𝛾Tr
h1/2 ‖∇w‖T ,
̂
π/4 C Γ,π/4
𝛾Tr
π/4 (ρ, α) = (
μ π/4 (ρ, α)
)
2ρ sin α
(2.10)
1/2
,
(2.11)
where μ π/4 (ρ, α) is defined in (2.3). Now, (2.1) follows from (2.8), (2.9), (2.10), and (2.11).
Analogously to Lemma 2.1, one can obtain an upper bound of the constant in (1.1). For that we consider
̂ π/2 , T
̂ π/4 , and T
̂ π/3 based on vertexes A = (0, 0), B = (1, 0), C = ( 1 , √3 ).
three reference triangles T
2 2
̃ 1 (T), one has
Lemma 2.2. For any w ∈ H
‖w‖T ≤ CPΩ h‖∇w‖T ,
where
, χPπ/3 CPT,π/3
, χPπ/2 CPT,π/2
CPΩ ≤ CPT = min{χPπ/4 CPT,π/4
}
̂
̂
̂
(2.12)
with
1/2
χPπ/4 = μ π/4 ,
1/2
χPπ/3 = μ π/3 ,
1/2
χPπ/2 = μ π/2 ,
μ π/2 and μ π/4 being defined in (2.2) and (2.3),
μ π/3 =
1/2
2
1
1
(1 + ρ2 − ρ cos α) + 2( (1 + ρ2 − ρ cos α)2 − ρ2 sin2 α) ,
3
9
3
and
CPT,π/4
=
̂
1
,
√2π
CPT,π/3
=
̂
3
,
4π
CPT,π/2
=
̂
1
.
π
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
(2.13)
282 | S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities
̂ π/2 → T coincides with (2.4) from Lemma 2.1. It is easy to see that w ∈ H
̃ 1 (T)
Proof. The mapping Fπ/2 : T
̃ 1 (T).
̂ The estimate
provided that ŵ ∈ H
‖w‖T ≤ χPπ/2 CPT,π/2
h‖∇w‖T ,
̂
1/2
χPπ/2 (ρ, α) = μ π/2 (ρ, α)
(2.14)
is obtained by following the previous proof. Analyzing the mappings
x = Fπ/3 (x)̂ = B π/3 x,̂
B π/3 = (
h
(2ρ cos α − 1)
√3
2h
ρ sin α
√3
h
0
−h
),
and
x = Fπ/4 (x)̂ = B π/4 x,̂
B π/4 = (
h
0
2ρh cos α − h
),
2ρh sin α
we obtain alternative estimates
1/2
(2.15)
1/2
(2.16)
‖w‖T ≤ χPπ/3 CPT,π/3
h‖∇w‖T ,
̂
χPπ/3 (ρ, α) = μ π/3 (ρ, α),
‖w‖T ≤ χPπ/4 CPT,π/4
h‖∇w‖T ,
̂
χPπ/4 (ρ, α) = μ π/4 (ρ, α),
where μ π/3 (ρ, α) and μ π/4 (ρ, α) are defined in (2.13) and (2.3), respectively. Therefore, (2.12) follows from
(2.14), (2.15), and (2.16).
3 Minorants of C ΓP and C ΓTr for Triangular Domains
3.1 Two-Sided Bounds of C ΓP and C ΓTr
Majorants of CPΓ and CTr
Γ provided by Lemma 2.1 should be compared with the corresponding minorants,
which can be found by means of the Rayleigh quotients
RPΓ [w] =
‖∇w‖T
‖w − {|w|}Γ ‖T
and
RTr
Γ [w] =
‖∇w‖T
.
‖w − {|w|}Γ ‖Γ
(3.1)
Lower bounds are obtained if the quotients are minimized on finite dimensional subspaces V N ⊂ H 1 (T)
formed by sufficiently representative collections of suitable test functions. For this purpose, we use either
power or Fourier series and introduce the spaces
V1N := span{x i y j }
and
V2N := span{cos(πix) cos(πjy)},
where i, j = 0, . . . , N, (i, j) ≠ (0, 0) and
dim V1N = dim V2N = M(N) := (N + 1)2 − 1.
M,P
M,Tr
The corresponding constants are denoted by C Γ and C Γ . Since V1N and V2N are limit dense in H 1 (T), the
respective minorants tend to the exact constants as M(N) tends to infinity.
We note that
‖∇w‖T
‖∇w‖T
1
inf RPΓ [w] = inf
= inf
= P.
1
1
1
̃
‖w
−
{|w|}
‖
‖w‖
w∈H (T)
w∈H (T)
CΓ
Γ T
T
w∈H (T,Γ)
Therefore, minimization of the first quotient in (3.1) on V1N or V2N yields a lower bound of CPΓ . For the quotient
RTr
Γ [w], we apply similar arguments.
Numerical results presented below are obtained with the help of two different codes based on the MATLAB Symbolic Math Toolbox and The FEniCS Project [23]. Table 1 demonstrates the ratios between the exact
constants and respective approximate values (for the selected ρ and α). They are quite close to 1 even for
relatively small N. Henceforth, we select N = 6 or 7 in the tests discussed below.
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities |
α=
N
M(N)
1
2
3
4
5
6
3
8
15
24
35
48
M,P
CΓ
/ĈP
Γ,π/2
0.8801
0.9945
0.9999
1.0000
1.0000
1.0000
π
2,
Γ,π/4
√2
2
M,Tr
C Γ /ĈTr
Γ,π/4
0.8647
0.9925
0.9962
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
ρ=1
α=
M,Tr
CΓ
/ĈTr
Γ,π/2
M,P
CΓ
0.9561
0.9898
0.9998
0.9999
1.0000
1.0000
π
4,
283
ρ=
/ĈP
Table 1. Ratios between approximate and reference constants with respect to increasing N.
x2
(0, 1)
2π π
3 3
π
4
(0, 0)
(a) ρ =
√2
2
(b) ρ =
π
2
(1, 0)
Γ
x1
√2
2
x2
(0, 1)
2π
3
(0, 0)
(c) ρ = 1
π
3
π
2
π
6
Γ
x1
(1, 0)
(d) ρ = 1
Figure 2. Two-sided bounds of C PΓ for T with different ρ.
In Figures 2a and 2c, we depict C Γ for M(N) = 48 (thin red line) for different T with ρ = √22 , ρ = 1, and
P
P
α ∈ (0, π). Guaranteed upper bounds CPπ/2 = 𝛾Pπ/2 C Γ,π/2
and CPπ/4 = 𝛾Pπ/4 C Γ,π/4
are depicted by dashed black
̂
̂
P
P
P
lines. Bold blue line illustrates C Γ = min{C π/2 , C π/4 }. Analogously in Figures 3a and 3b, a red marker denotes
M,Tr
Tr
the lower bound C Γ (for M(N) = 48) of the constant CTr
Γ . It is presented together with the upper bound C Γ
Tr
Tr
Tr
Tr
Tr
Tr
(blue marker), which is defined as minimum of C π/2 = 𝛾π/2 C ̂
and C π/4 = 𝛾π/4 C Γ,π/4
. Table 2 represents
̂
Γ,π/2
this information in the digital form.
Figure 2a corresponds to the case ρ = √22 . Notice that for α = 4π the constant CPΓ is known and the comM,P
puted lower bound C Γ (red marker) practically coincides with it (see, e.g., Figure 2b). Since in this case, the
mapping Fπ/4 is identical, the upper bound also coincides with the exact value. An analogous coincidence
M,Tr
M,P
can be observed for CTr
in Figure 3a. In Figure 2c, the red curve, corresponding to C Γ , coincides
Γ and C Γ
M,P
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
284 | S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities
(a) ρ =
√2
2
(b) ρ = 1
Figure 3. Two-sided bounds of C Tr
Γ for T with different ρ.
ρ=
√2
2
ρ=1
α
48,P
CΓ
C PΓ
48,Tr
CΓ
C Tr
Γ
48,P
CΓ
C PΓ
π/18
π/9
π/6
2π/9
5π/18
π/3
4π/9
π/2
5π/9
2π/3
13π/18
7π/9
5π/6
8π/9
17π/18
0.2429
0.2414
0.2389
0.2379
0.2632
0.3008
0.3740
0.4075
0.4382
0.4905
0.5115
0.5289
0.5426
0.5524
0.5583
0.2657
0.2627
0.2577
0.2507
0.2722
0.3220
0.4140
0.4554
0.4933
0.5361
0.5552
0.5720
0.5856
0.5956
0.6017
1.2786
0.9289
0.7919
0.7259
0.6945
0.6829
0.6947
0.7136
0.7409
0.8274
0.8948
0.9898
1.1334
1.3796
1.9436
1.5386
1.0838
0.8792
0.7543
0.7503
0.8348
0.7973
0.7801
0.7973
0.9118
1.0040
1.1292
1.3107
1.6118
2.2851
0.3245
0.3248
0.3268
0.3339
0.3514
0.3809
0.4556
0.4929
0.5280
0.5884
0.6129
0.6332
0.6492
0.6607
0.6676
0.3486
0.3493
0.3527
0.3636
0.3884
0.4269
0.5187
0.4929
0.5340
0.6037
0.6318
0.6550
0.6733
0.6865
0.6944
48,Tr
C Tr
Γ
1.2572
0.9058
0.7632
0.6906
0.6529
0.6362
0.6404
0.6560
0.6797
0.7569
0.8175
0.9033
1.0332
1.2565
1.7692
1.6971
1.2116
1.0118
0.9201
0.9003
0.8634
0.7162
0.6560
0.7162
0.8634
0.9607
1.0874
1.2673
1.5623
2.2179
CΓ
Table 2. Two-sided bounds of C PΓ and C Tr
Γ for T with different α and ρ.
with the blue line of CPΓ at the point α = 2π (due to the fact that for this angle F is the identical mapping and
̂ π/2 ; see Figure 2d). Figure 3b exposes similar results for C M,Tr and CTr (CTr ).
T coincides with T
Γ
Γ
π/2
Figures 4 and 5 demonstrate the same bounds for ρ =
very efficient. Namely,
P
Ieff
:=
CPΓ
48,P
CΓ
√3
2
and 32 . We see that estimates of CPΓ and CTr
Γ are
∈ [1.0463, 1.1300] for ρ =
√3
,
2
P
Ieff
∈ [1.0249, 1.1634] for ρ =
3
.
2
∈ [1.0363, 1.3388] for ρ =
√3
,
2
Tr
Ieff
∈ [1.2917, 1.7643] for ρ =
3
.
2
Analogously,
Tr
Ieff
:=
CTr
Γ
48,Tr
CΓ
3.2 Two-Sided Bounds of C TP
The spaces V1N and V2N can also be used for analysis of the quotient
RT [w] =
‖∇w‖T
,
‖w − {|w|}T ‖T
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities |
(a) ρ =
√3
2
(b) ρ =
285
3
2
Figure 4. Two-sided bounds of C PΓ for T with different ρ.
(a) ρ =
√3
2
(b) ρ =
3
2
Figure 5. Two-sided bounds of C Tr
Γ for T with different ρ.
M,P
which yields guaranteed lower bounds of the constant in (1.1). The respective values are denoted by C T .
These bounds are compared with
P,⊕
CT
:=
diam(T)
j1,1
and
CPT := max{
diam(T) P
,
}
2j0,1
4π
(see (1.7) and (1.8), respectively) as well as the one derived in Lemma 2.2.
M,P
In Figures 6a, 6b, and 6d, we present C T (in this case M(N) = 48) together with CPT (blue think line),
C T and CPT for α ∈ (0, π), and ρ = √22 , √23 , and 23 . We see that C T (red thin line) indeed lies within the
admissible two-sided bounds. From these figures, it is obvious that new upper bounds CPT are sharper than
P,⊕
C T for T with ρ ≠ 1. True values of the constant lie between the bold blue and thin red lines, but closer to
the red one, which practically shows the constant (this follows from the fact that increasing M(N) does not
provide a noticeable change for the line, e.g., for M(N) = 63 maximal difference does not exceed 1e − 8).
Also, we note that, the lower bound CPT (black line) is quite efficient, and, moreover, asymptotically exact for
α → π.
P,∆
Due to [21], we know the improved upper bound C T (cf. (1.6)) for isosceles triangles. In Figure 6c, we
M,P
P,∆
P
compare C T (M(N) = 48) with both upper bounds C T (from Lemma 2.2) and C T (black doted line). It is
P,∆
easy to see that C T (black dashed line) is rather accurate and for α → 0 and α → π provide almost exact
P,∆
estimates. CPT (blues thick line) improves C T only for some α. The lower bound C48
T (red thin line) indeed
P,∆
converges to C T as T degenerates when α tends to 0 (see [21]).
P,⊕
48,P
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
286 | S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities
(a) ρ =
√2
2
(c) ρ = 1
(b) ρ =
√3
2
(d) ρ =
3
2
P,∆
P
P
Figure 6. C 48
T , C T , C T , and C T for T with α ∈ (0, π) and different ρ.
3.3 Shape of the Minimizer
Exact constants in (1.2) and (1.4) are generated by the minimal positive eigenvalues of (1.3) and (1.5). This
section presents results related to the respective eigenfunctions. In order to depict all of them in a unified
form, we use the barycentric coordinates λ i ∈ (0, 1), i = 1, 2, 3, ∑3i=1 λ i = 1.
Figures 7 and 8 show the eigenfunctions computed for isosceles triangles with different angles α between
two legs (zero mean condition is imposed on one of the legs). The eigenfunctions have been computed in the
M,P
M,Tr
process of finding C Γ and C Γ . The eigenfunctions are normalized so that the maximal value is equal to 1.
π
For α = 2 , the exact eigenfunction associated with the smallest positive eigenvalue λPΓ = ( zh0 )2 is known (see
[28]). It is
ζ0 x1
ζ0 (x2 − h)
p
u Γ = cos(
) + cos(
),
h
h
p
where ζ0 is the root of the first equation in (1.9) (see Figure 7d). We can compare u Γ with the approximate
M,P
eigenfunction u Γ computed by minimization of RPΓ [w] (this function is depicted in Figure 7c).
M,Tr
Eigenfunctions related to the constant C Γ
are presented in Figure 8. Again, for α = 2π we know the
exact eigenfunction
̂
̂
̂
̂
uTr
Γ = cos( ζ 0 x 1 ) cosh( ζ 0 (x 2 − h)) + cosh( ζ 0 x 1 ) cos( ζ 0 (x 2 − h)),
where ζ0̂ is the root of second equation in (1.9) (see Figure 8d). This function minimizes the quotient RTr
Γ [w]
̂
̂
and yields the smallest positive eigenvalue λTr
=
z
tanh(
z
)/h.
It
is
easy
to
see
that
numerical
approximation
0
0
Γ
M,Tr
C Γ (for M(N) = 48) practically coincides with the exact function.
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities |
48,p
,α=
π
6
48,p
,α=
π
2
48,p
,α=
2π
3
(a) u Γ
(c) u Γ
(e) u Γ
48,p
(b) u Γ
,α=
π
3
p
(d) exact u Γ , α =
48,p
(f) u Γ
M,P
Figure 7. Eigenfunctions corresponding to C Γ
,α=
287
π
2
3π
4
and for M = 48 on simplex T with ρ = 1 and different α.
Typically, the eigenfunctions associated with minimal positive eigenvalues expose a continuous evolution with respect to α. However, this is not true for the quotient RT [w], where the minimizer may radically
change the profile. Figure 6c indicates a possibility of such a rapid change at α = 3π , where the curve (related
to C48
T ) obviously becomes non-smooth. This happens because an equilateral triangle has double eigenvalue
48
and the minimizer of RT [w] over V1N changes its profile. Figure 9 shows the eigenfunctions u48
T,1 and u T,2 re48
48
π
π π
lated to the minimal eigenvalues λ T,1 and λ T,2 , respectively, for difference angles, i.e. α = 3 − ε, 3 , 3 + ε.
All functions are computed for isosceles triangles and are sorted in accordance with increasing values of the
respective eigenvalues. It is easy to see that at α = 3π the first and the second eigenfunctions change places.
Table 3 presents the corresponding results in the digital form.
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
288 | S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities
48,Tr
,α=
π
6
48,Tr
,α=
π
2
,α=
2π
3
(a) u Γ
(c) u Γ
48,p
(e) u Γ
48,Tr
(b) u Γ
,α=
π
3
(d) exact uTr
Γ ,α =
48,p
(f) u Γ
M,Tr
Figure 8. Eigenfunctions corresponding to C Γ
,α=
π
2
3π
4
for M = 48 on simplex T with ρ = 1 and different α.
It is worth noting that for equilateral triangles two minimal eigenfunctions are known (see [25]):
2π
2π
π
(2x1 − 1)) − cos(
x2 ) cos( (2x1 − 1)),
3
3
√3
2π
2π
π
x2 ) sin( (2x1 − 1)).
u2 = sin( (2x1 − 1)) + cos(
3
3
√3
u1 = cos(
48
These functions practically coincide with the functions u48
T,1 and u T,2 presented in Figure 9c. Finally, we
note that this phenomenon (change of the minimal eigenfunction) does not appear for ρ = √22 or ρ = 23 . The
eigenvalues as well as the constants corresponding to the eigenfunctions presented in Figure 9 are shown in
Table 3.
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities |
(a) u48
T,1 , α =
π
3
(c) u48
T,1 , α =
π
3
(e) u48
T,1 , α =
π
3
(b) u48
T,2 , α =
−ε
+ε
M,P
Figure 9. Eigenfunctions corresponding to C T
with different α.
289
−ε
π
3
(d) u48
T,2 , α =
π
3
(f) u48
T,2 , α =
π
3
+ε
with M = 48 on isosceles triangles T ∈ ℝ2 in barycentric coordinates (ε =
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
π
36 )
290 | S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities
C 48
T,i
λ48
T,i
π
3
48
C T,i
0.2419
0.2229
0.1353
17.0951
20.1216
54.6024
0.2387
0.2387
0.1378
17.5463
17.5463
52.6396
0.2537
0.2355
0.1422
15.5404
18.0309
49.4818
u48
T,1
0.23137
18.6804
0.23671
17.8471
0.24336
16.8850
u48
T,2
u48
T,3
0.17082
0.1229
34.2707
66.2058
0.17435
0.12789
32.8970
61.1402
0.17642
0.13298
32.1295
56.5493
u48
T,1
u48
T,2
u48
T,3
0.34714
0.24485
0.18258
8.2983
16.6801
29.9981
0.35523
0.24885
0.19084
7.9247
16.1482
27.4575
0.3648
0.25125
0.19845
7.5143
15.8412
25.3921
ρ
π
3
48
C T,i
1
u48
T,1
u48
T,2
u48
T,3
√2
2
3
2
π
3
λ48
T,i
uM
T,i
M,P
Table 3. C T
−ε
+ε
λ48
T,i
and λ M
T corresponding to the first three eigenfunctions in Figure 9.
x2
N
x2
M
D(D x , D y , D z )
D
α
θ
A
T
Γ
x1
B(h1 , 0, 0)
α
θ
A
C(0, 0, h3 )
x1
H
x3
x3
Figure 10. Simplex in ℝ3 .
Figure 11. Coordinate of the vertex D.
4 Two-Sided Bounds of C ΓP and C ΓTr for Tetrahedrons
We orient the coordinates as it is shown in Figure 10 and define a non-degenerate simplex in ℝ3 with vertexes
A = (0, 0, 0), B = (h1 , 0, 0), C = (0, 0, h3 ), and D = (h2 sin θ cos α, h2 sin θ sin α, h2 cos α), where h1 and h3
are the scaling parameters along axis O x1 and O x3 , respectively, AD = h2 , α is a polar angle, and θ is an
azimuthal angle (see Figure 11). Let Γ be defined by vertexes A, B, and C.
To the best of our knowledge, exact values of constants in Poincaré-type inequalities for simplexes in
ℝ3 are unknown. Therefore, we first consider four basic (reference) tetrahedrons with h2 = 1, θ̂ = 2π , and
α̂ 1 = 4π , α̂ 2 = 3π , α̂ 3 = 2π , and α̂ 4 = 2π
3 . The respective constants are found numerically with high accuracy
̂ ̂
(see Table 4, which shows convergence of the constants with respect to increasing M(N)). Henceforth, T
θ, α̂
̂
denotes a reference tetrahedron, where θ and α̂ are certain fixed angles. By Fθ,̂ α̂ we denote the respective
̂ ̂ → T.
mapping Fθ,̂ α̂ : T
θ, α̂
Then, for an arbitrary tetrahedron T, we have
‖v‖T ≤ CPΓ h2 ‖∇v‖T ,
1/2
‖v‖Γ ≤ CTr
Γ h 2 ‖∇v‖T
with approximate bounds
̃P =
CPΓ ⪅ C
Γ
min
̂
α={π/4,π/3,π/2,2π/3}
{𝛾Pπ/2, α̂ CPΓ,π/2,
}
̂
α̂
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
(4.1)
S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities |
α̂ =
π
4
α̂ =
x ̂2
π
3
x ̂2
T̂π/4
T̂π/3
α̂
α̂
x ̂1
̂Γ
x ̂3
7
26
63
124
215
x ̂1
̂Γ
x ̂3
P,M
Γ,π/2, α̂
M(N)
Tr,M
Γ,π/2, α̂
Ĉ
P,M
Γ,π/2, α̂
Ĉ
0.32431
0.338539
0.341122
0.341147
0.341147
Tr,M
Γ,π/2, α̂
Ĉ
0.760099
0.829445
0.831325
0.831335
0.831335
α̂ =
Ĉ
0.325985
0.340267
0.342556
0.342589
0.342589
0.654654
0.761278
0.762901
0.762905
0.762905
π
2
α̂ =
x ̂2
2π
3
x ̂2
T̂π/2
α̂
x ̂1
̂Γ
x ̂3
7
26
63
124
215
x ̂1
̂Γ
x ̂3
P,M
Γ,π/2, α̂
Tr,M
Γ,π/2, α̂
Ĉ
0.360532
0.373669
0.375590
0.375603
0.375603
P,M
Γ,π/2, α̂
Table 4. Ĉ
T̂2π/3
α̂
θ̂
M(N)
291
Ĉ
0.654654
0.751615
0.751994
0.751999
0.751999
Tr,M
Γ,π/2, α̂
and Ĉ
P,M
Γ,π/2, α̂
Ĉ
0.4152099
0.4274757
0.4286444
0.4286652
0.4286652
Tr,M
Γ,π/2, α̂
Ĉ
0.686161
0.863324
0.864595
0.864630
0.864630
with respect to M(N) for T̂θ,̂ α̂ with ρ = 1, θ̂ =
π
2,
and different α.̂
and
̃ Tr
CTr
Γ ⪅ CΓ =
min
̂
α={π/4,π/3,π/2,2π/3}
Tr
},
{𝛾Tr
̂
π/2, α̂ C Γ,π/2,
α̂
P
P
Tr
where C Γ,π/2,
̂
̂
α̂ and C Γ,π/2,
α̂ are the constants related to four reference tetrahedrons from Table 4, and 𝛾π/2, α̂
Tr
̂
and 𝛾π/2, α̂ (see (4.2)) are generated by the mapping Fπ/2, α̂ : T π/2, α̂ → T. Here, the reference tetrahedrons are
defined based on  = (0, 0, 0), B̂ = (1, 0, 0), Ĉ = (0, 0, 1), D̂ = (cos α,̂ sin α,̂ 0) with α̂ = { 4π , 3π , 2π , 2π
3 }, and
Fπ/2, α̂ (x)̂ is presented by the relation
x = Fπ/2, α̂ (x)̂ = B π/2, α̂ x,̂
h1
h2
B π/2, α̂ = {b ij }i,j=1,2,3 = h2 ( 0
0
where
ν(ρ, α) = cos α sin θ −
h1
cos α,̂
h2
det B π/2, α̂ = h1 h2 h3
ν(ρ,α)
sin α̂
sin α sin θ
sin α̂
cos θ
sin α̂
0
0),
h3
h2
sin α sin θ
.
sin α̂
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
292 | S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities
3
Figure 12. C PΓ and C Tr
Γ for T ∈ ℝ with H = 1, ρ = 1 with estimate based on four reference tetrahedrons.
By analogy with the two-dimensional case (see (2.7)), 𝛾Pπ/2, α̂ and 𝛾Tr
depend on the maximum eigenvalue
π/2, α̂
of the matrix
b211 + b212 b12 b22
b12 b32
2
A π/2, α̂ := h1 ( b12 b22
b222
b22 b32 ) .
b12 b32
b22 b32 b233 + b232
The maximal eigenvalue of the matrix A π/2, α̂ is defined by the relation λmax (A π/2, α̂ ) = h22 μ α,θ, α̂ with
1/3
μ α,θ, α̂ = (E5
−1/3
− E3 E5
+
1
E1 ),
3
where
E1 = b211 + b212 + b222 + b232 + b233 ,
E3 =
E2
E1 2
−( ) ,
3
3
E4 = (
E2 = b211 b222 + b211 b232 + b211 b233 + b212 b233 + b222 b233 ,
E1 3 E1 E2 1 2 2 2
+ b11 b22 b33 ,
) −
3
3
2
E5 = E4 + (E33 + E24 )1/2 .
Therefore, 𝛾Pπ/2, α̂ and 𝛾Tr
in (4.1) are as follows:
π/2, α̂
𝛾Pπ/2, α̂ = μ1/2
,
π/2, α̂
𝛾Tr
π/2, α̂ = (
1/2
sin α̂
) 𝛾Pπ/2, α̂ .
ρ sin α sin θ
(4.2)
P
Tr
Lower bounds of the constants CPΓ and CTr
Γ are computed by minimization of RΓ [w] and RΓ [w] over the
N
1
set V3 ⊂ H (T), where
V3N := {φ ijk = x i y j z k , i, j, k = 0, . . . , N, (i, j, k) ≠ (0, 0, 0)}
and dim V3N = M(N) := (N + 1)3 − 1.
The respective results are presented in Tables 5 and 6 for T with h1 = 1, h3 = 1, and ρ = 1. We note that
the exact values of the constants are probably closer to the numbers presented in the left-hand side columns.
M,P
M,Tr
For θ = π/2, we also present estimates of C Γ and C Γ (red lines) graphically in Figure 12.
5 Example
Constants in the Friedrichs’, Poincaré, and other functional inequalities arise in various problems of numerical analysis, where we need to know values of the respective constants associated with particular domains.
Constants in projection type estimates arise in a priori analysis (see, e.g., [5, 10, 26]). Constants in Clement’s
interpolation inequalities are important for residual type a posteriori estimates (see, e.g., [1, 40], and [6]
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities |
α=
θ
M,P
CΓ
π/6
π/4
π/3
π/2
2π/3
3π/4
5π/6
0.23883
0.23883
0.29666
0.34302
0.40428
0.42890
0.44964
α=
0.49035
0.45388
0.41958
0.35667
0.41958
0.45388
0.49035
0.24621
0.24621
0.31194
0.34112
0.40562
0.43110
0.45193
π
2
α=
̃P
C
Γ
0.29484
0.29484
0.38976
0.37559
0.42867
0.45017
0.46607
0.51308
0.49075
0.46002
0.37560
0.46002
0.49075
0.51308
α=
1.09760
1.09760
0.89122
0.98017
1.17698
1.35195
1.65317
3.78259
2.43897
1.74467
1.22920
1.74467
2.43897
3.78259
α=
0.49841
0.46173
0.42259
0.34115
0.42259
0.46173
0.49841
0.25870
0.25870
0.33489
0.34256
0.40927
0.43505
0.45539
2π
3
α=
̃P
C
Γ
0.33069
0.33069
0.43880
0.42865
0.45997
0.47204
0.47972
0.51792
0.50261
0.48413
0.42867
0.48413
0.50261
0.51792
π
3
α=
π
2
̃P
C
Γ
M,P
CΓ
̃P
C
Γ
0.51054
0.47683
0.43724
0.34259
0.43724
0.47683
0.51054
0.29484
0.29484
0.38976
0.37559
0.42867
0.45017
0.46607
0.51308
0.49075
0.46002
0.37560
0.46002
0.49075
0.51308
3π
4
α=
M,P
̃P
C
Γ
0.34468
0.34468
0.45742
0.45017
0.47457
0.48239
0.48607
0.52253
0.51308
0.50261
0.45731
0.50261
0.51308
0.52253
CΓ
0.93123
0.93123
0.78904
0.75199
0.86463
0.98220
1.19017
2.05449
1.38951
1.06349
0.75200
1.06349
1.38951
2.05449
M,Tr
α=
M,Tr
̃ Tr
C
Γ
0.96245
0.96245
0.79146
0.83132
0.99473
1.14144
1.39424
2.71866
1.78094
1.31130
0.83133
1.31130
1.78094
2.71866
α=
̃ Tr
C
Γ
π
4
CΓ
π
2
M,Tr
CΓ
Table 6. C Γ
̃P
C
Γ
M,P
α=
̃ Tr
C
Γ
CΓ
θ
α=
M,P
CΓ
CΓ
π
6
M,Tr
θ
π
4
5π
6
M,P
̃P
C
Γ
0.35499
0.35499
0.47106
0.46607
0.48598
0.49064
0.49115
0.52694
0.52253
0.51792
0.47811
0.51792
0.52253
0.52694
CΓ
̃ P for different θ and α.
(M(N) = 124) and C
Γ
M,P
π/6
π/4
π/3
π/2
2π/3
3π/4
5π/6
̃P
C
Γ
CΓ
Table 5. C Γ
π/6
π/4
π/3
π/2
2π/3
3π/4
5π/6
α=
M,P
CΓ
M,P
θ
π/6
π/4
π/3
π/2
2π/3
3π/4
5π/6
π
6
293
̃ Tr
C
Γ
0.91255
0.91255
0.75950
0.76290
0.90578
1.03737
1.26490
2.27382
1.50166
1.12431
0.76291
1.12431
1.50166
2.27382
α=
̃ Tr
C
Γ
1.07244
1.07244
0.91773
0.86459
0.96174
1.07921
1.29582
2.39471
1.64324
1.27423
0.86463
1.27423
1.64324
2.39471
α=
M,Tr
CΓ
2π
3
M,Tr
CΓ
π
3
M,Tr
̃ Tr
C
Γ
0.93123
0.93123
0.78904
0.75199
0.86463
0.98220
1.19017
2.05449
1.38951
1.06349
0.75200
1.06349
1.38951
2.05449
CΓ
3π
4
α=
M,Tr
̃ Tr
C
Γ
1.21573
1.21573
1.04309
0.98220
1.08134
1.20686
1.44268
2.95902
2.01841
1.50833
1.12971
1.50833
2.01841
2.95902
CΓ
π
2
5π
6
M,Tr
̃ Tr
C
Γ
1.47044
1.47044
1.26357
1.19017
1.30191
1.44721
1.72383
4.21999
2.80588
2.11790
1.67033
2.11790
2.80588
4.21999
CΓ
̃ Tr for different θ and α.
(M(N) = 124) and C
Γ
where these constants have been evaluated). For constants in the trace inequalities associated with polygonal domain, we refer to [8]. Constants in functional (embedding) inequalities arise in a posteriori error estimates of the functional type (error majorants). Concerning this point we refer to [19, 24, 33–37] and other
references cited therein. Below, we deduce an advanced version of an error majorant, which uses constants
in Poincaré-type inequalities for functions with zero mean traces on inter-element boundaries. This is done
in order to maximally extend the space of admissible fluxes. However, first, we shall discuss the reasons that
invoke Poincaré-type constants in a posteriori estimates.
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
294 | S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities
Let u denote the exact solution of an elliptic boundary value problem generated by the pair of conjugate
operators grad and −div (e.g., the problem (5.4)–(5.7) considered below) and v be a function in the energy
space satisfying the prescribed (Dirichlet) boundary conditions. Typically, the error e := u − v is measured in
terms of the energy norm ‖∇e‖ (or some other equivalent norm), whose square is bounded from above by the
quantities
∫ R(v, divq)e dx,
∫ D(∇v, q) ⋅ ∇e dx,
∫ R Γ N (v, q ⋅ n)e ds,
Ω
Ω
ΓN
where Γ N is the Neumann part of the boundary ∂T, n is the outward unit normal, and q is an approximation
of the dual variable (flux). The terms R, D, and R Γ N represent residuals of the differential (balance) equation, constitutive (duality) relation, and Neumann boundary condition, respectively. Since v and q are known
from a numerical solution, fully computable estimates can be obtained if these integrals are estimated by the
Hölder, Friedrichs, and trace inequalities (which involve the corresponding constants). However, for a Lipschitz domain Ω with piecewise smooth (e.g., polynomial) boundaries these constants may be unknown. A
way to avoid these difficulties is suggested by modifications of the estimates using ideas of domain decomposition. Assume that Ω is a polygonal (polyhedral) domain decomposed into a collection of non-overlapping
convex polygonal sub-domains Ω i , i.e.,
Ω := ⋃ Ω i ,
Ω i ∈OΩ
OΩ := {Ω i ∈ Ω | Ω i ∩ Ω i = 0, i ≠ i , i = 1, . . . , N}.
We denote the set of all edges (faces) by G and the set of all interior faces by Gint (i.e., Γ ij ∈ Gint if Γ ij = Ω i ∩ Ω j ).
Analogously, GN denotes the set of edges on Γ N . The latter set is decomposed into Γ N k := Γ N ∩∂Ω k (the number
of faces that belongs to Γ N k is K N ). Now, the integrals associated with R and R Γ N can be replaced by sums of
local quantities
KN
N
∑ ∫ R Ω (v, divq)e dx
i=1 Ω
and
∑ ∫ R Γ N (v, q ⋅ n)e ds.
k=1 Γ
i
Nk
If the residuals satisfy the conditions
∫ R Ω i (v, divq) dx = 0 for all i = 1, . . . , N,
Ωi
∫ R Γ N (v, q ⋅ n) ds = 0 for all k = 1, . . . , K N ,
ΓNk
then
∫ R Ω (v, divq)e dx ≤ CPΩ i ‖R Ω i (v, divq)‖Ω i ‖∇e‖Ω i ,
(5.1)
Ωi
∫ R Γ N (v, q ⋅ n)e ds ≤ CTr
Γ N ‖R Γ N (v, q ⋅ n)‖Γ N k ‖∇e‖Ω k .
k
(5.2)
ΓNk
Hence, we can deduce a computable upper bound of the error that contains local constants CPΩ i and CTr
Γ N k for
simple subdomains (e.g., triangles or tetrahedrons) instead of the global constants associated with Ω.
The constant CPΩ may arise if, e.g., nonconforming approximations are used. For example, if v does not
exactly satisfy the Dirichlet boundary condition on Γ D k , then in the process of estimation it may be necessary
to evaluate terms of the type
∫ G D (v)e ds,
k = 1, . . . , K D ,
ΓDk
where Γ D k is a part of Γ D associated with a certain Ω k , and G D (v) is a residual generated by inexact satisfaction
of the boundary condition. If we impose the requirement that the Dirichlet boundary condition is satisfied in
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities |
295
a weak sense, i.e., {|G D (v)|}Γ Dk = 0, then each boundary integral can be estimated as follows:
∫ G D (v)e ds ≤ CPΓ D ‖G D (v)‖Γ Dk ‖∇e‖Ω k .
k
(5.3)
ΓDk
After summing (5.1), (5.2), and (5.3), we obtain a product of weighted norms of localized residuals (which
are known) and ‖∇e‖Ω . Since the sum is bounded from below by the squared energy norm, we arrive at computable error majorant.
Now, we discuss elaborately these questions with the paradigm of the following boundary value problem:
find u such that
−divp + ρ2 u = f,
in Ω,
(5.4)
p = A∇u,
in Ω,
(5.5)
u = uD ,
on Γ D ,
(5.6)
on Γ N .
(5.7)
A∇u ⋅ n = F
Here f ∈ L2 (Ω), F ∈ L2 (Γ N ), u D ∈ H 1 (Ω), and A is a symmetric positive definite matrix with bounded coefficients satisfying the condition λ1 |ξ|2 ≤ Aξ ⋅ ξ , where λ1 is a positive constant independent of ξ . The generalized solution of (5.4)–(5.7) exists and is unique in the set V0 + u D , where V0 := {w ∈ H 1 (Ω) | w = 0 on Γ D }.
Assume that v ∈ V0 + u D is a conforming approximation of u. We wish to find a computable majorant of
the error norm
|||e|||2 := ‖∇e‖2A + ‖ρe‖2 ,
where ‖∇e‖2A := ∫Ω A∇e ⋅ ∇e dx. First, we note that the integral identity that defines u can be rewritten in the
form
(5.8)
∫ A∇e ⋅ ∇w dx + ∫ ρ2 ew dx = ∫(fw − ρ2 vw − A∇v ⋅ ∇w) dx + ∫ Fw ds for all w ∈ V0 .
Ω
Ω
ΓN
Ω
It is well known (see [34, Section 4.2]) that this relation yields a computable majorant of |||e|||2 , if we introduce a vector-valued function q ∈ H(Ω, div) and transform (5.8) by means of integration by parts rule. The
majorant has the form
|||e||| ≤ ‖D Ω (∇v, q)‖A−1 + C1 ‖R(v, divq)‖Ω + C2 ‖R Γ N (v, q ⋅ n)‖Γ N ,
(5.9)
where C1 and C2 are positive constants explicitly defined by λ1 , the Friedrichs’ inequality CFΩ in ‖v‖Ω ≤
CFΩ ‖∇v‖Ω for functions vanishing on Γ D , and constant CTr
Γ N in the trace inequality associated with Γ N . The
integrands are defined by the relations
D(∇v, q) := A∇v − q,
R(v, divq) := divq + f − ρ2 v,
R Γ N (v, q ⋅ n) := q ⋅ n − F.
In general, finding CFΩ and CTr
Γ N may not be an easy task. We can exclude C 2 if q additionally satisfies the
condition q ⋅ n = F. Then, the last term in (5.9) vanishes. However, this condition is difficult to satisfy, if F is
a complicated nonlinear function. In order to exclude C1 , we can apply domain decomposition and use (5.1)
instead of the global estimate. Then, the estimate will operate with the constants CPΩ i (whose upper bounds
are known for convex domains). Moreover, it is shown below that using the inequalities (1.2) and (1.4), we
can essentially weaken the assumptions required for the variable q.
Define the space of vector-valued functions
̂
H(Ω,
OΩ , div) := {q ∈ L2 (Ω, ℝd ) | q = q i ∈ H(Ω i , div), {|divq i + f − ρ2 v|}Ω i = 0 for all Ω i ∈ OΩ ,
{|(q i − q j ) ⋅ n ij |}Γ ij = 0 for all Γ ij ∈ Gint ,
{|q i ⋅ n k − F|}Γ Nk = 0 for all k = 1, . . . , K N }.
̂
We note that the space H(Ω,
OΩ , div) is wider than H(Ω, div) (so that we have more flexibility in determination of optimal reconstruction of numerical fluxes). Indeed, the vector-valued functions in H(Ω, div) must
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
296 | S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities
have continuous normal components on all Γ ij ∈ Gint and satisfy the Neumann boundary condition in the
̂
pointwise sense. The functions in H(Ω,
OΩ , div) satisfy much weaker conditions: namely, the normal components are continuous only in terms of mean values (integrals) and the Neumann condition must hold in the
integral sense only.
We reform (5.8) by means of the integral identity
∑
∫ (q ⋅ ∇w + divqw) dx =
Ω i ∈OΩ Ω
i
∫ (q i − q j ) ⋅ n ij w ds + ∑
∑
∫ q i ⋅ n i w ds,
Γ N k ∈Γ N Γ
Nk
Γ ij ∈Gint Γ
ij
̂
which holds for any w ∈ V0 and q ∈ H(Ω,
OΩ , div). Setting w = e in (5.8) and applying the Hölder inequality,
we find that
|||e|||2 ≤ ‖D(∇v, q)‖A−1 ‖∇e‖A + ∑ ‖R(v, divq)‖Ω i e − {|e|}Ω i Ω i
Ω i ∈OΩ
+ ∑ r ij (q)e − {|e|}Γ ij Γ ij + ∑ ρ k (q)e − {|e|}Γ Nk Γ N ,
k
Γ N k ∈Γ N
Γ ij ∈Gint
where
r ij (q) := ‖(q i − q j ) ⋅ n ij ‖Γ ij ,
ρ k (q) := ‖q k ⋅ n k − F‖Γ Nk .
In view of (1.1) and (1.4), we obtain
|||e|||2 ≤ ‖D(∇v, q)‖A−1 ‖∇e‖A + ∑ ‖R(v, divq)‖Ω i CPΩ i ‖∇e‖Ω i
Ω i ∈OΩ
Tr
+ ∑ r ij (q)CTr
Γ ij ‖∇e‖Ω i + ∑ ρ k (q)C Γ N ‖∇e‖Ω i .
Γ N k ∈Γ N
Γ ij ∈Gint
k
(5.10)
The second term on the right-hand side is estimated by the quantity ℜ1 (v, q)‖∇e‖Ω , where
ℜ21 (v, q) := ∑
Ω i ∈OΩ
(diamΩ i )2
‖R(v, divq)‖2Ω i .
π2
We can represent any Ω i ∈ OΩ as a sum of simplexes such that each simplex has one edge on ∂Ω i . Let CTr
i,max
denote the largest constant in the respective Poincaré-type inequalities (1.4) associated with all edges of ∂Ω i .
Then, the last two terms of (5.10) can be estimated by the quantity ℜ2 (v, q)‖∇e‖Ω , where
2 2
ℜ22 (q) := ∑ (CTr
i,max ) η i
Ω i ∈OΩ
with
η2i =
∑
Γ ij ∈Gint ,
Γ ij ∩∂Ω i =0̸
1 2
r (q) +
4 ij
∑
Γ k ∈GN ,
Γ k ∩∂Ω i =0̸
ρ2k (q).
Then, (5.10) yields the estimate
|||e|||2 ≤ ‖D(∇v, q)‖A−1 ‖∇e‖A + (ℜ1 (v, q) + ℜ2 (q))‖∇e‖Ω ,
which shows that
1
(5.11)
(ℜ1 (v, q) + ℜ2 (q)).
λ1
Here, the term ℜ2 (q) controls violations of conformity of q (on interior edges) and inexact satisfaction of
boundary conditions (on edges related to Γ N ). It is easy to see that ℜ2 (q) = 0, if and only if the quantity q ⋅ n
is continuous on Gint and exactly satisfies the boundary condition. Hence, ℜ2 (q) can be viewed as a measure
of the ‘flux nonconformity’. Other terms have the same meaning as in well-known a posteriori estimates of
the functional type, namely, the first term measures the violations of the relation q = A∇v (cf. (5.5)), and
ℜ1 (v, q) measures inaccuracy in the equilibrium (balance) equation (5.4). The right-hand side of (5.11) contains known functions (approximations v and q of the exact solution and exact flux). The constants CTr
i,max
can be easily computed using results of Sections 2–4. Finally, we note that estimates similar to (5.11) were
derived in [35] for elliptic variational inequalities and in [24] for a class of parabolic problems.
|||e||| ≤ ‖D(∇v, q)‖A−1 +
Funding: This work was supported by the Suomalainen Tiedeakatemia Foundation and RFBR Grant 14-0100162/15.
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities |
297
References
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
[24]
[25]
[26]
[27]
[28]
[29]
[30]
[31]
[32]
M. Ainsworth and J. T. Oden, A Posteriori Error Estimation in Finite Element Analysis, Wiley and Sons, New York, 2000.
I. Babuška and A. K. Aziz, On the angle condition in the finite element method, SIAM J. Numer. Anal. 13 (1976), no. 2,
214–226.
R. Bañuelos, T. Kulczycki, I. Polterovich and B. Siudeja, Eigenvalue inequalities for mixed Steklov problems, in: Operator
Theory and its Applications, Amer. Math. Soc. Transl. Ser. 2 231, American Mathematical Society, Providence (2010),
19–34.
P. H. Bérard, Spectres et groupes cristallographiques. I. Domaines euclidiens, Invent. Math. 58 (1980), no. 2, 179–199.
D. Braess, Finite Elements, 2nd ed., Cambridge University Press, Cambridge, 2001. Translated from the 1992 German
edition.
C. Carstensen and S. A. Funken, Fully reliable localized error control in the FEM, SIAM J. Sci. Comput. 21 (2000), no. 4,
1465–1484.
C. Carstensen and J. Gedicke, Guaranteed lower bounds for eigenvalues, Math. Comp. 83 (2014), no. 290, 2605–2629.
C. Carstensen and S. A. Sauter, A posteriori error analysis for elliptic PDEs on domains with complicated structures,
Numer. Math. 96 (2004), no. 4, 691–721.
S. Y. Cheng, Eigenvalue comparison theorems and its geometric applications, Math. Z. 143 (1975), no. 3, 289–297.
P. G. Ciarlet, The Finite Element Method for Elliptic Problems, Stud. Math. Appl. 4, North-Holland, Amsterdam, 1978.
C. R. Dohrmann, A. Klawonn and O. B. Widlund, Domain decomposition for less regular subdomains: Overlapping Schwarz
in two dimensions, SIAM J. Numer. Anal. 46 (2008), no. 4, 2153–2168.
D. W. Fox and J. R. Kuttler, Sloshing frequencies, Z. Angew. Math. Phys. 34 (1983), no. 5, 668–696.
A. Girouard and I. Polterovich, Spectral geometry of the Steklov problem, preprint (2014), http://arxiv.org/abs/1411.
6567.
Y. Hoshikawa and H. Urakawa, Affine Weyl groups and the boundary value eigenvalue problems of the Laplacian, Interdiscip. Inform. Sci. 16 (2010), no. 1, 93–109.
A. Klawonn, O. Rheinbach and O. B. Widlund, An analysis of a FETI-DP algorithm on irregular subdomains in the plane,
SIAM J. Numer. Anal. 46 (2008), no. 5, 2484–2504.
V. Kozlov and N. Kuznetsov, The ice-fishing problem: The fundamental sloshing frequency versus geometry of holes, Math.
Methods Appl. Sci. 27 (2004), no. 3, 289–312.
V. Kozlov, N. Kuznetsov and O. Motygin, On the two-dimensional sloshing problem, Proc. R. Soc. Lond. Ser. A Math. Phys.
Eng. Sci. 460 (2004), no. 2049, 2587–2603.
N. Kuznetsov, T. Kulczycki, M. Kwaśnicki, A. Nazarov, S. Poborchi, I. Polterovich and B. Siudeja, The legacy of Vladimir
Andreevich Steklov, Notices Amer. Math. Soc. 61 (2014), no. 1, 9–22.
U. Langer, S. Repin and M. Wolfmayr, Functional a posteriori error estimates for parabolic time-periodic boundary value
problems, Comput. Methods Appl. Math. 15 (2015), no. 3, 353–372.
R. S. Laugesen and B. A. Siudeja, Maximizing Neumann fundamental tones of triangles, J. Math. Phys. 50 (2009), no. 11,
112903.
R. S. Laugesen and B. A. Siudeja, Minimizing Neumann fundamental tones of triangles: An optimal Poincaré inequality,
J. Differential Equations 249 (2010), no. 1, 118–135.
X. Liu and S. Oishi, Guaranteed high-precision estimation for P0 interpolation constants on triangular finite elements, Jpn.
J. Ind. Appl. Math. 30 (2013), no. 3, 635–652.
A. Logg, K.-A. Mardal and G. N. Wells (eds.), Automated solution of differential equations by the finite element method,
Lect. Notes Comput. Sci. Eng. 84, Springer, Heidelberg, 2012.
S. Matculevich, P. Neittaanmäki and S. Repin, A posteriori error estimates for time-dependent reaction-diffusion problems
based on the Payne–Weinberger inequality, Discrete Contin. Dyn. Syst. 35 (2015), no. 6, 2659–2677.
B. J. McCartin, Eigenstructure of the equilateral triangle. II. The Neumann problem, Math. Probl. Eng. 8 (2002), no. 6,
517–539.
S. G. Mikhlin, Constants in Some Inequalities of Analysis, John Wiley and Sons, Chichester, 1986.
M. T. Nakao and N. Yamamoto, A guaranteed bound of the optimal constant in the error estimates for linear triangular
element, in: Topics in Numerical Analysis, Comput. Suppl. 15, Springer, Vienna (2001), 165–173.
A. I. Nazarov and S. I. Repin, Exact constants in Poincaré type inequalities for functions with zero mean boundary traces,
Math. Methods Appl. Sci. 38 (2014), no. 15, 3195–3207.
L. E. Payne and H. F. Weinberger, An optimal Poincaré inequality for convex domains, Arch. Rational Mech. Anal. 5 (1960),
286–292.
M. A. Pinsky, The eigenvalues of an equilateral triangle, SIAM J. Math. Anal. 11 (1980), no. 5, 819–827.
H. Poincaré, Sur les équations aux dérivées partielles de la physique mathématique, Amer. J. Math. 12 (1890), no. 3, 211–
294.
H. Poincaré, Sur les équations de la physique mathématique, Rend. Circ. Mat. Palermo 8 (1894), 57–156.
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM
298 | S. Matculevich and S. Repin, Explicit Constants in Poincaré-Type Inequalities
[33] S. Repin, A posteriori error estimation for variational problems with uniformly convex functionals, Math. Comput. 69
(2000), no. 230, 481–500.
[34] S. Repin, A Posteriori Estimates for Partial Differential Equations, Radon Ser. Comput. Appl. Math. 4, De Gruyter, Berlin,
2008.
[35] S. Repin, Estimates of deviations from exact solutions of variational inequalities based upon Payne–Weinberger inequality, J. Math. Sci. (N. Y.) 157 (2009), no. 6, 874–884.
[36] S. Repin, Estimates of constants in boundary-mean trace inequalities and applications to error analysis, in: Numerical
Mathematics and Advanced Applications (ENUMATH 2013), Lect. Notes Comput. Sci. Eng. 103, Springer, Cham (2015),
215–223.
[37] S. I. Repin and L. S. Xanthis, A posteriori error estimation for elastoplastic problems based on duality theory, Comput.
Methods Appl. Mech. Engrg. 138 (1996), no. 1-4, 317–339.
[38] V. A. Steklov, Sur les problèmes fondamentaux de la physique mathématique, Ann. Sci. Éc. Norm. Supér. (3) 19 (1902),
191–259, 455–490.
[39] A. Toselli and O. Widlund, Domain Decomposition Methods. Algorithms and Theory, Springer Ser. Comput. Math. 34,
Springer, Berlin, 2005.
[40] R. Verfürth, A Review of A Posteriori Error Estimation and Adaptive Mesh-Refinement Techniques, Wiley and Sons, New
York, 1996.
Authenticated | svetlana.v.matculevich@jyu.fi author's copy
Download Date | 7/10/16 1:30 AM