Conservation Laws in Ideal MHD - Harvard
advertisement

Conservation Laws in Ideal MHD
Nick Murphy
Harvard-Smithsonian Center for Astrophysics
Astronomy 253: Plasma Astrophysics
February 5–10, 2014
These lecture notes are largely based on Plasma Physics for Astrophysics by Russell Kulsrud, Lectures in
Magnetohydrodynamics by the late Dalton Schnack, Ideal Magnetohydrodynamics by Jeffrey Freidberg,
Magnetic Reconnection by Eric Priest and Terry Forbes, and various papers by M. Berger & J. Perez
Outline
I
Mathematical interlude: dyadic tensors
I
Conservation of mass, momentum, and energy
I
The frozen-in condition
I
Helicity and cross-helicity
While somewhat horrible, dyadic tensors allow the
equations of MHD to be written in a compact/useful form
I
A dyadic tensor1 is a second rank tensor that can be written
as the tensor product of two vectors: Aij = Bi Cj
A = BC = (B1 ê1 + B2 ê2 + B3 ê3 ) (C1 ê1 + C2 ê2 + C3 ê3 )
= B1 C1 ê1 ê1 + B1 C2 ê1 ê2 + B1 C3 ê1 ê3 +
B2 C1 ê2 ê1 + B2 C2 ê2 ê2 + B2 C3 ê2 ê3 +
B3 C1 ê3 ê1 + B3 C2 ê3 ê2 + B3 C3 ê3 ê3
where ê1 . . . are unit vectors and
0
0
ê1 ê3 =
0
1
(1)
ê1 ê3 . . . are unit dyads, e.g.:
0 1
0 0
(2)
0 0
Good resources: Lectures in Magnetohydrodynamics by Dalton Schnack and
http://people.rit.edu/pnveme/EMEM851n/constitutive/tensors rect.html
Dot products and double dot products with dyadic tensors
I
In general, BC 6= CB
I
Dot products from the left and right are different:
I
ê1 · A = B1 C1 ê1 + B1 C2 ê2 + B1 C3 ê3
(3)
A · ê1 = B1 C1 ê1 + B2 C1 ê2 + B3 C1 ê3
(4)
Double-dot notation is ambiguous but we use:
A : T ≡ Aij Tij
where we sum over repeated indices
The divergence of a dyadic tensor is a vector
I
The divergence of a dyadic tensor is
∇ · T = ∂i Tij
(5)
This is a vector whose jth component is
(∇ · T)j =
I
∂T2j
∂T3j
∂T1j
+
+
∂x1
∂x2
∂x3
We can even generalize Gauss’ theorem!
Z
I
∇ · TdV =
dS · T
S
(6)
(7)
What about the dyad T ≡ ∇V?
I
The gradient operator is given by
∇ ≡ êi
I
∂
∂
∂
∂
≡ ê1
+ ê2
+ ê3
∂xi
∂x1
∂x2
∂x3
(8)
Then T ≡ ∇V is given in Cartesian coordinates by
∂Vj
∂xi
∂Vj
∇V =
êi êj
∂xi
∂x Vx
= ∂y Vx
∂z Vx
(∇V)ij
(9)
=
(10)
∂x Vy
∂y Vy
∂z Vy
∂x Vz
∂y Vz
∂z Vz
where i is the row index and j is the column index
(11)
Conservative form
I
As mentioned previously, conservative form is usually given by
∂
(stuff) + ∇ · (flux of stuff) = 0
∂t
(12)
where source and sink terms go on the RHS
I
I
I
If ‘stuff’ is a scalar, then ‘flux of stuff’ is a vector
If ‘stuff’ is a vector, then ‘flux of stuff’ is a dyadic tensor
If this equation is satisfied, then ‘stuff’ is locally conserved
The continuity equation is already in conservative form
I
The continuity equation is
∂ρ
+ ∇ · (ρV) = 0
∂t
(13)
where ρV is the mass flux
I
Mass is locally conserved ⇒ the universe is safe once again!
Is mass conserved globally?
I
Integrate the continuity equation over a closed volume V
bounded by a surface S
Z ∂ρ
+ ∇ · (ρV) dV = 0
(14)
∂t
Z
Z
∂
ρ dV + ∇ · (ρV) dV = 0
(15)
∂t V
I
Now define M as the mass within V and use Gauss’ theorem
I
dM
+
dS · (ρV)
=0
(16)
dt
|{z}
| S {z
}
change of mass in V mass flow through S
I
Yep, we’re still good. Mass is conserved globally.
I
Recall that this was how we derived the continuity equation in
the first place!
The momentum equation in conservative form
I
The momentum equation can be written as
∂ρV
+∇·T=0
∂t
where the ideal MHD stress tensor T is given by
B2
BB
T = ρVV + p +
I−
8π
4π
(17)
(18)
and I ≡ ê1 ê1 + ê2 ê2 + ê3 ê3 is the identity dyadic tensor
I
The quantity p + B 2 /8π is called the total pressure
I
One can also include the viscous and gravitational stress
tensors, or use a pressure tensor rather than a scalar pressure
Physical meaning of the stress tensor
I
Imagine you have an infinitesimal box
I
Forces are exerted on each face by the outside volume
I
The forces on each side of the box could have components in
three directions
I
The stress tensor includes the nine quantities needed to
describe the total force exerted on this box by the outside
The Reynolds stress tensor
I
The Reynolds stress is given by
TV ≡ ρVV
I
(19)
TV represents the flux of momentum. Think:
TV ≡
ρV
V
|{z}
|{z}
Momentum density times a velocity
(20)
I
(ρVx )Vy is the rate at which the x component of momentum
is carried in the y direction (and vice versa)
I
Dyadic tensors are awesome!
The Maxwell stress tensor
I
The Maxwell stress is
TB ≡
BB
4π
BB
B2
I−
8π
4π
(21)
I
The quantity
I
Key point: Momentum is transported by the magnetic field
is called the hoop stress
We can’t always drop gravity!
I
Gravity can often be treated simply as a body force where g is
a constant
I
More generally, g is found using the gradient of a scalar
potential, φ,
g = −∇φ
(22)
where Poisson’s equation is used to solve for the potential,
∇2 φ = 4πG ρ
I
The gravitational stress tensor is then
Tg =
I
(23)
(∇φ)2 I ∇φ∇φ
−
8πG
4πG
(24)
We then recover the usual form of the force,
ρg = −∇ · Tg
(25)
CGL theory allows for pk 6= p⊥
I
For a scalar pressure, the corresponding part of the stress
tensor is symmetric
p 0 0
Tp = pI = 0 p 0
(26)
0 0 p
I
Chew, Goldberger, & Low (1956) allow for different
perpendicular and parallel pressures in the ‘double adiabatic’
approximation
p⊥ 0 0
TCGL = 0 p⊥ 0
(27)
0
0 pk
I
Used more frequently in astrophysics than in laboratory
plasmas
Conservation of energy
I
The energy equation can be written as
∂w
+∇·s=0
∂t
I
The energy density is
w=
ρV 2
+
2
|{z}
kinetic
I
B2
8π
|{z}
magnetic
+
p
γ−1
| {z }
internal
(29)
The energy flux is
s=
I
(28)
p
cE × B
ρV 2
V+
V + pV +
|{z}
2
γ
−
1
| {z } | {z }
| 4π
{z }
work
kinetic internal
Poynting
(30)
pV represents the work done on the plasma from −∇p forces
We now have a set of three equations describing
conservation of mass, momentum, and energy
I
Conservation of mass, momentum, & energy are given by
∂ρ
+ ∇ · (ρV) = 0
∂t
∂ρV
+∇·T = 0
∂t
∂w
+∇·s = 0
∂t
(31)
(32)
(33)
where the stress tensor, energy density, and energy flux are
B2
BB
T = ρVV + p +
I−
(34)
8π
4π
ρV 2 B 2
p
w =
+
+
(35)
2
8π
γ−1
2
ρV
γ
E×B
s =
+
p V+
(36)
2
γ−1
4π
The most important property of ideal MHD is the frozen-in
condition
I
I
Define S as a surface bounded by a closed curve C that is
co-moving with the plasma
The magnetic flux through S is
Z
Ψ=
B · dS
(37)
S
I
There are contributions to
I
I
dΨ
dt
from:
Changes in B with S held fixed, dΨ1
The flux swept out by C as it moves with the plasma, dΨ2
How does the flux change due to B changing?
I
Take the time derivative of the magnetic flux with S fixed:
Z
dΨ1
∂B
=
· dS
dt
∂t
S Z
= −c
(∇ × E) · dS
S
I
= −c E · dl
(38)
C
where we used Faraday’s law and Stokes’ theorem.
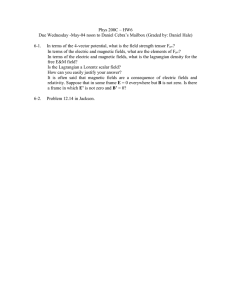
How does the area of S change as it is swept with the
plasma?
V
C2
dS
dl
C1
I
The lateral area swept out by C as it flows with the plasma is
dS = Vdt × dl
I
(39)
where the line element dl is tangent to C
The flux through this area is B · dS = B · Vdt × dl , so that
I
dΨ2
=
B · V × dl
dt
CI
= − V × B · dl
(40)
C
Putting it all together
I
The total change in magnetic flux through S is then
dΨ
dt
I
But E +
V×B
c
dΨ1 dΨ2
+
dt I dt
I
= − c E · dl − V × B · dl
| C{z }
| C {z
}
changes in B changes in S
I V×B
· dl
= −c
E+
c
C
=
(41)
= 0 in ideal MHD, so that
dΨ
= 0.
dt
The magnetic flux through any co-moving fluid element
remains constant in ideal MHD.
(42)
In ideal MHD, the magnetic field and plasma are frozen-in
to each other
I
If a parcel of plasma moves, the magnetic field attached to
the parcel moves along with it
I
More rigorously: if two plasma elements are initially connected
by a magnetic field line, they will remain connected by a
magnetic field line at future times.
I
Magnetic topology (e.g., connectivity) is preserved in ideal
MHD
I
The plasma cannot move across magnetic field lines (though
it remains free to move along the field)
A useful concept in ideal MHD is a field line velocity
I
More generally, flux will be frozen-in if there exists some
velocity U such that
E+
U×B
=0
c
(43)
The velocity U is a field line velocity.
I
In ideal MHD, U is the bulk fluid velocity V
I
A field line velocity does not need to be a fluid velocity
I
In Hall MHD, the field line velocity is frozen in to the electron
fluid
What is meant by a field line velocity?
I
In ideal MHD, a key field line velocity is
V⊥ = c
I
E×B
B2
(44)
This is the component of velocity perpendicular to B that the
plasma is traveling at which is frozen into B
The concept of a field line velocity is frought with peril.
Frought, I tell you!
I
I
There is no way to distinguish one field line from another at a
different time
There are a infinite number of field line velocities
I
I
Uk is arbitrary (but in ideal MHD we usually pick Vk )
Need to satisfy
E·B
=0
B×∇× B
B2
(45)
True for ideal MHD, but generally not for 3D resistive MHD!
Eyink et al. (2013) argue that stochastic field line
wandering in turbulence leads to Richardson diffusion that
breaks down the frozen-in condition
I
This result is new and controversial; and warrants
investigation by independent groups
Magnetic helicity measures the linkage of magnetic fields
I
The magnetic field B can be written in terms of a vector
potential
B=∇×A
(46)
while noting that A is not gauge invariant: A0 = A + ∇φ
I
The helicity of a magnetic field is given by
Z
H=
A · B dV
(47)
V
I
A · B should not be considered a ‘helicity density’ because of
gauge freedom!
I
Helicity is approximately conserved during magnetic
reconnection and topology changes
I
Helicity can be injected into a system such as the solar
corona. When too much builds up, it ends up being expelled
through coronal mass ejections.
Helicity examples
I
A single untwisted closed flux loop has H = 0
I
A single flux rope with a magnetic flux of Φ that twists
around itself T times has a helicity of H = T Φ2
I
Two interlinked untwisted flux loops with fluxes Φ1 and Φ2
have H = ±2Φ1 Φ2 where the sign depends on the sense of
the linkedness
There are generalizations to allow for gauge-invariant
definitions of helicity
I
Berger & Field (1984) defined the relative magnetic helicity to
be
Z
H=
(A · B − A0 · B0 ) dV
(48)
V∞
where B0 = ∇ × A0 is the potential field inside V with the
same field outside of V (see also Finn & Antonsen 1985)
I
In toroidal laboratory experiments, it is natural to consider the
volume contained within conducting wall boundaries that are
coincident with closed flux surfaces (i.e., the magnetic field
along the wall is parallel to the boundary)
Helicity changes through parallel electric fields and helicity
being added/removed to system
I
I
The time evolution of magnetic helicity is given by
Z
Z
dH
= −2c
E · BdV + 2c
Ap × E · dS
dt
V
S
where we choose ∇ × Ap = 0 and Ap · dS = 0 on S
The first term represents helicity dissipation when Ek 6= 0
I
I
Always satisfied in ideal MHD!
The second term represents helicity fluxes in and out of
system
I
For example, flux emergence from the solar photosphere
corresponds to helicity injection in the corona
(49)
The cross helicity HC measures the imbalance between
interacting waves (important in MHD turbulence)
I
The cross helicity is given by
Z
V · B dV
HC =
(50)
V
I
In ideal MHD, the rate of change of HC is
I
dHC
1 2
γ p
= − dS ·
V +
B − V × (V × B)
dt
2
γ−1ρ
S
(51)
This vanishes when dS · B = dS · V = 0 along the boundary S
or when the boundary conditions are periodic.
I
Cross helicity is an ideal MHD invariant when this integral
vanishes
Summary
I
Ideal MHD conserves mass, momentum, and energy (as it
darn well should!)
I
In ideal MHD, the magnetic field is frozen-in to the plasma
flow
I
It is often useful to think in terms of a magnetic field line
velocity, but there are caveats!
I
Helicity and cross-helicity provide two topological constraints
that are conserved in ideal MHD