Technical information Bending Technology - trumpf
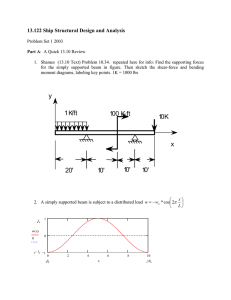
advertisement

Technical information Bending Technology Technical information Bending Technology Edition: 05/2007 Ordering Information Please state title of document, desired language and date of edition. TRUMPF Werkzeugmaschinen GmbH + Co. KG Technische Dokumentation Johann-Maus-Straße 2 D-71254 Ditzingen Fon: +49 (0) 71 56/3 03-0 Fax: +49 (0) 71 56/3 03-5 40 Internet: http//www.trumpf.com E-Mail: docu.tw@de.trumpf.com This document was compiled by the Technical Documentation Dept. of TRUMPF Werkzeugmaschinen GmbH + Co. KG All rights, in particular the right to reproduce, distribute or translate this documentation, are reserved to TRUMPF Werkzeugmaschinen GmbH + Co. KG, even in case of patent and industrial rights applications. No part of this documentation may be reproduced, processed, duplicated or distributed by means of electronic systems in any form whatsoever without the prior written consent of TRUMPF Werkzeugmaschinen GmbH + Co. KG Subject to errors and technical changes. © TRUMPF Werkzeugmaschinen GmbH + Co. KG TRUMPF Werkzeugmaschinen GmbH + Co. KG cannot be held responsible for possible mistakes in this documentation. Any warranty for direct and indirect damages, arising in connection with the delivery or the use of this documentation, is excluded, as far as this is in conformity with the law. Before You proceed... Contents This Technical information brochure "Bending Technology" provides a quick overview of the essentials of bending. After a brief outline of the TruBend Series 5000, the individual subassemblies of the press brake are described in greater detail. This is followed by explanations on the technology of bending (bending methods and calculations) and of the TRUMPF tooling system; attention is also paid to the ACB® angle sensor. Information concerning materials and tips and tricks from daily practice round off the topics discussed. A list of key words provided at the end of this document makes it easier to find specific information more quickly. T488EN00.DOC Before You proceed... 0-5 Table of Contents Chapter 1 Machine technology TruBend Series 5000 1. Machine concept............................................................ 1-3 2. 2.1 Technical data................................................................ 1-4 Axes of the TruBend Series 5000.................................... 1-6 3. 3.1 3.2 3.3 3.4 Sub-assemblies ............................................................. 1-7 Machine frame ................................................................. 1-8 Ram and downstroking drive ......................................... 1-10 Bed with crowning.......................................................... 1-11 Tool holder..................................................................... 1-13 Lower tool adjustment, I axis .................................... 1-14 Lower tool adjustment by example of „Flattening“................................................................ 1-15 CNC-controlled lower tool adjustment (Option)........ 1-18 Bending aid (optional)............................................... 1-19 TASC 6000 control ........................................................ 1-22 Control panel ............................................................ 1-23 Operating station ...................................................... 1-24 Additional footswitch................................................. 1-25 3.5 Chapter 2 4. 4.1 4.2 4.3 Backgauge.................................................................... 1-26 Backgauge axis system ................................................. 1-29 Technical data: Backgauge ........................................... 1-31 Stop fingers and stop positions ..................................... 1-33 Micrometer stop fingers (Option) .............................. 1-35 5. TRUMPF BendGuard ................................................... 1-36 Technology (Application technology) 1. 1.1 1.2 0-6 Table of Contents Bending methods: Overview ........................................ 2-3 Air bending....................................................................... 2-3 Coining............................................................................. 2-5 T488EN00.DOC 1.3 1.4 1.5 Hemming.......................................................................... 2-7 Flattening ......................................................................... 2-8 Sensor bending................................................................ 2-9 Overview: Sensor bending ....................................... 2-13 Learned bend............................................................ 2-13 2. 2.1 2.2 2.3 2.4 2.5 2.6 Calculations ................................................................. 2-14 Press tonnage................................................................ 2-14 Box height ...................................................................... 2-17 Inside radius .................................................................. 2-19 Selecting the die width................................................... 2-21 Shortest flange length.................................................... 2-23 Flat length ...................................................................... 2-26 Calculating the flat length in case of large bend radii ........................................................................... 2-27 Calculating the flat length in case of small bend radii ........................................................................... 2-29 Use of the compensation value in the machine controller ................................................................... 2-33 Minimum distances and lengths .................................... 2-34 Different bending flange shapes.................................... 2-35 2.7 2.8 Chapter 3 T488EN00.DOC Tool system 1. Terminology ................................................................... 3-2 2. 2.1 2.2 2.3 2.4 2.5 Tools from TRUMPF ...................................................... 3-3 Tool identification............................................................. 3-3 Upper tools ...................................................................... 3-4 Lower tools ...................................................................... 3-6 Die width ..................................................................... 3-6 Opening angle ............................................................ 3-7 Tools for thin sheets ...................................................... 3-11 System segmentation of tools ....................................... 3-13 3. Laser hardening........................................................... 3-15 4. Imprint-free bending.................................................... 3-16 5. Special tools................................................................. 3-18 Table of Contents 0-7 Chapter 4 0-8 Table of Contents Index T488EN00.DOC Chapter 1 Machine technology TruBend Series 5000 1. Machine concept............................................................ 1-3 2. 2.1 Technical data................................................................ 1-4 Axes of the TruBend Series 5000.................................... 1-6 3. 3.1 3.2 3.3 3.4 Sub-assemblies ............................................................. 1-7 Machine frame ................................................................. 1-8 Ram and downstroking drive ......................................... 1-10 Bed with crowning.......................................................... 1-11 Tool holder..................................................................... 1-13 Lower tool adjustment, I axis .................................... 1-14 Lower tool adjustment by example of „Flattening“................................................................ 1-15 CNC-controlled lower tool adjustment (Option)........ 1-18 Bending aid (optional)............................................... 1-19 TASC 6000 control ........................................................ 1-22 Control panel ............................................................ 1-23 Operating station ...................................................... 1-24 Additional footswitch................................................. 1-25 3.5 T488EN01.DOC Machine technology TruBend Series 5000 1-1 1-2 4. 4.1 4.2 4.3 Backgauge.................................................................... 1-26 Backgauge axis system ................................................. 1-29 Technical data: Backgauge ........................................... 1-31 Stop fingers and stop positions ..................................... 1-33 Micrometer stop fingers (Option) .............................. 1-35 5. TRUMPF BendGuard ................................................... 1-36 Machine technology TruBend Series 5000 T488EN01.DOC 1. Machine concept Die TruBend Series 5000 comprises CNC-controlled press brakes for bending flat metal workpieces. The machines are designed for a great variety of bending tasks and are distinguished by the following features: T488EN01.DOC • CNC backgauge system. • Downstroking drive with two tandem cylinders. • Lower tool adjustment (hemming without tool change). • Self-centering tool holder. • Quick and easy operation and programming. • High level of work safety. • • Defined tilt of the ram. Automatic crowning. Machine concept 1-3 2. Technical data B C D E A Machine layout Fig. 44112 TruBend 5050 5085 5085 S 5130 Tonnage [kN] 500 850 850 1300 Machine dimensions Bending length (A) [mm] 1275 2210 2720 3230 Width between columns (B) [mm] 1040 1750 2260 2690 Throat (C) [mm] 420 420 420 420 Bed width [mm] 100 120 120 120 Open height (die space) (D) [mm] 385 385 (615) 385 (615) 385 (615) Working height with 100 mm lower tool (E) [mm] 1050 1050 1050 1050 Y rapid down speed [mm/s] 220 220 220 220 Y press speed [mm/s] 0.1 - 10 0.1 - 10 0.1 - 10 0.1 - 10 Y rapid up speed [mm/s] 220 220 220 220 Stroke [mm] 215 215 (445) 215 (445) 215 (445) Ram positioning accuracy [mm] 0.005 0.005 0.005 0.005 Ram tilt [mm] ±10 ±10 ±10 ±10 Speeds Y axis Y axis (ram) The values in brackets apply to enlarged versions (options) 1-4 Technical data Tab. 1-1 T488EN01.DOC TruBend Tonnage [kN] Machine dimensions Bending length (A) Speeds Y axis Y axis (ram) 5170 5170 S 5230 5230 S 5320 1700 1700 2300 2300 3200 [mm] 3230 4250 3230 4250 4420 Width between columns (B) [mm] 2690 3680 3690 3680 3680 Throat (C) [mm] 420 420 420 420 420 Bed width [mm] 120 180 180 180 200 Open height (die space) (D) [mm] 615 615 615 615 615 Working height with 100 mm lower tool (E) [mm] 1050 1050 1050 1050 1050 Y rapid down speed [mm/s] 220 220 220 220 220 Y press speed [mm/s] 0.1 - 10 0.1 - 10 0.1 - 10 0.1 - 10 0.1 - 10 Y rapid up speed [mm/s] 220 220 220 220 220 Stroke [mm] 445 445 445 445 445 Ram positioning accuracy [mm] 0.005 0.005 0.005 0.005 0.005 Ram tilt [mm] ±10 ±10 ±10 ±10 ±10 Tab. 1-2 T488EN01.DOC Technical data 1-5 2.1 Axes of the TruBend Series 5000 Y2 Y1 X2 X1 R1 R2 Z2 Z1 V I Axes of the TruBend Series 5000 Fig. 38803 Axis Description TruBend 5050 TruBend 5085 – 5320 I axis Lower tool adjustment (forward and back) Pneumatic or CNC controlled* Pneumatic or CNC controlled* R axis Height adjustment of stop fingers CNC controlled CNC controlled V axis Crowning Not available Manual or CNC controlled* X axis Backgauge travel and stop fingers forward and back CNC controlled CNC controlled Y axis Ram motion and ram tilt CNC controlled CNC controlled Z axis Stop finger travel (left and right) Manual or CNC controlled* Manual or CNC controlled* Bending aid (BH1/BH2)* Workpiece support Not available CNC controlled *Options 1-6 Tab. 1-3 Technical data T488EN01.DOC 3. Sub-assemblies 1 5 2 6 3 4 7 8 10 9 1 Y drive and hydraulics 5 Hydraulic cylinder 9 2 Control panel 6 Ram 10 Operating station Machine body 3 Upper tool clamp 7 TRUMPF BendGuard 4 Backgauge 8 Lower tool clamp Sub-assemblies, TruBend Series 5000 machine T488EN01.DOC Fig. 44068 Sub-assemblies 1-7 3.1 Machine frame The machine frame is a C-frame comprising two side frames (housings), the bed and connection support. The pressure cylinders and the ram are mounted on the upper part of the C-frame. Due to this arrangement, the C-frame spreads apart during the bending process (C-frame deflection). This inevitable physical principle is compensated for by the control (deflection compensation). There is therefore no negative impact on the bending results. Frame deflection Y Ist > Y Soll Soll Aktio Y Y Ist Reaktio Frame deflection • • • 1-8 Sub-assemblies Fig. 32203 The press force acts upon the machine bed during the bending process (action). This leads to a counter-force arising in the C-frame of the side housings (reaction). Deflection occurs, despite the robust construction of the side housings. This is the reason why the upper tool penetrates less deeply into the lower tool than the hydraulic cylinders travel on the stroke. T488EN01.DOC Deflection compensation On the TruBend 5050 – 5320, C-frame deflection is compensated for by the machine control. Two machine parameters are available for deflection compensation: • The compensation value [bar], with which the counter-pressure is compensated. • The deflection constant [µm/bar], with which the pressuredependent deflection is equalized. These machine parameters can be checked or adapted at any time using a service program. T488EN01.DOC Sub-assemblies 1-9 3.2 Ram and downstroking drive The ram is guided by means of adjustable cam followers. The ram is highly rigid and is spherically suspended, allowing it to be tilted. The downstroking drive is an electro-hydraulic drive featuring two tandem cylinders (left / right) each. The cylinders are controlled by means of proportional valves. Features: • Exact synchronous motion of both cylinders pairs (Y1/Y2). • Long service life of the guides and sealing elements. • High positioning accuracy of the ram. The machine is equipped with an incremental path measurement system. 1 2 3 1 Control block on cylinder pair Y1 2 Control block on cylinder pair Y2 Ram and downstroking drive ACB busbar 1-10 Sub-assemblies 3 Pump block Fig. 43679 Embedded at the front of the ram is a busbar (CAN bus) for connecting the modules of the ACB angle sensor. T488EN01.DOC 3.3 Machine bed Bed with crowning The bed, or press table, is parallel and at right angles to the mounting surfaces of the hydraulic cylinders and the guideways of the backgauge. It has a milled surface for the crowning motor. A movable wedge plate and the lower tool holder are mounted above the crowning motor. Force distribution during bending Under load, the ram, with the two hydraulic cylinder axes Y1 and Y2, acts like a beam on two supports. Despite the high moment of resistance, the ram bows under load, i.e. during the bending process. Directly beneath the hydraulic cylinders, therefore, the upper tool plunges deeper into the die than it does at ram center. This effect varies with the length of the bend and the press tonnage. As a result, ram deflection increases with higher tonnages and longer bends. With crowning Without crowning Y1 Y1 Y2 Y2 1 1 Crowning --- Deformation Fig. 32205, 32206 T488EN01.DOC Sub-assemblies 1-11 Purpose of crowning Crowning refers to the calculated and mechanically adjusted curvature of the machine bed. Crowning provides for parallelism between the ram and the bed (press table). Since the press tonnage, the distance between cylinder pairs Y1 and Y2, the geometry and the material properties of the ram, and thus the resistance moment, are known, the expected bowing can be calculated. Bowing is the vertical deviation from the horizontal bending line. This deviation is compensated for by crowning (V axis). 90° 90° 90° > 90° 90° 90° Bending results with/without crowning Fig. 32207 Crowning The crowning mechanism consists of two wedge plates milled in a wave pattern. The lower tool holder is mounted on the upper wedge plate. The lower wedge plate is worked (milled) directly into the bed. The gradient angle of these wedge plates increases towards the center. The curvature (crowning value) in the bed needed to compensate for the bowing of the ram is achieved by shifting the upper wedge plate horizontally. Adjustment takes place manually or CNC-controlled via the gear motors integrated in the bed. α1 α2 α3 α4 α4 α3 α2 α1 α1 < α2 < α3 < α4 X X Bowing Principle of crowning 1-12 Sub-assemblies Fig. 51623 T488EN01.DOC 3.4 Tool holder The tool holder is suitable for the use of head and shoulder-bearing tools. The press force is evenly transferred through the tool to the workpiece, even in case of large tool heights or lateral forces (e.g. in hemming). Angle accuracy is not affected. The upper and lower tool holders are machined and aligned in such a way that the upper and lower tools are automatically centered after clamping. Head-bearing In the case of head-bearing tools, the punch butts against the inside of the upper tool holder. Shoulder-bearing In the case of shoulder-bearing tools, the punch butts against the outside of the upper tool holder. Shoulder-bearing tool Head-bearing tool Tool types Fig. 35647, 35648 Upper tool holder Lower tool holder Modufix clamping Clamping via short-stroke cylinder Hydraulic clamping Tools can be used in reverse Clamping pressure: 50 bar Tab. 1-4 T488EN01.DOC Sub-assemblies 1-13 Lower tool adjustment, I axis The lower tool holder is mounted on the machine bed in such a way that it can be shifted in X direction. This adjustment is performed using pneumatic cylinders. The end positions (fixed stops) are defined by means of various spacers which are adapted to the widths of the lower tools. The position of the adjustment path in front of or behind the lower tool is set by means of the pivoting element. Lower tool adjustment enables: • Hemming (flattening) without tool change. • Positioning of special dies. • Station operation with tools of different heights. • Work with lower tool adapters (e.g. two lower tools). • Production of Z-bends with tool holder systems. • Facilitates removal of complex parts. 1 1 Fixation of adjustment path, 2 Spacer for the length of the cannot be modified 2 3 3 1 Pivoting element for position of the adjustment path adjustment path I axis 1-14 Sub-assemblies Fig. 29259 T488EN01.DOC Lower tool adjustment by example of „Flattening“ Program-controlled adjustment of the lower tool holder to fixed stop. Two positions: Flattening in rear tool position: Flattening in rear tool position Flattening in front tool position: (without punch support): I axis is at the front. I axis is at the front. I axis is at the rear. Flatting at front and rear Fig. 43700 The fixed stop depends on the tool width of a 30° lower tool. The following spacers are available for this: Die widths Spacers W6, W8, W10 30 mm W12 27.5 mm W16 25 mm W20 22.5 mm W24 1 20 mm Tab. 1-5 In addition to this, specially configured spacers are also available for special dies. 1 T488EN01.DOC The spacer for die width W24 is also suited for lower tool holder EV70 (holder for Z inserts). Sub-assemblies 1-15 Flattening at the front Prerequisite • The pivoting element butts against the rear fixed stop. • Appropriate spacer for lower tool has been loaded at the front. Fig. 29860 1. Bend to an angle of 30°. I axis is located in the front position. Fig. 29861 2. Flatten. I axis is located in the rear position. 1-16 Sub-assemblies T488EN01.DOC Flattening at the rear Prerequisite • The pivoting element butts against the front fixed stop. • Appropriate spacer for lower tool has been loaded at the rear. Fig. 29858 1. Bend to an angle of 30°. I axis is located in the rear position. Fig. 29859 2. Flatten. I axis is located in the front position. T488EN01.DOC Sub-assemblies 1-17 CNC-controlled lower tool adjustment (Option) CNC-controlled adjustment of lower tools allows tool designs that were previously impossible. In CNC-controlled lower tool adjustment, a CNC-controlled stepping motor is used for adjustment in X direction. The lower tool can therefore be shifted to any position within the entire travel range without having to interrupt production for retooling (pivoting element/spacer). Compressed air is therefore no longer required for press brake operation. (Exception: Stop finger clamping at the 2-axes backgauge).) 1-18 Sub-assemblies CNC-controlled lower tool adjustment Fig. 44066 Stepping motor unit Fig. 44065 T488EN01.DOC Bending aid (optional) Electromechanical bending aid for the TruBend 5085 - 5320. The bending aid can be moved manually parallel to the bed, in order to adjust it to the bending length and/or to bending stations. It can also be adapted to different lower tool heights and widths by means of 2 adjusting screws. Maximum 2 bending aids can be used on a machine. Advantages Technical data • • Relieve the operator when working with large and heavy parts. No counter-bending effects when bending thin workpieces with large flange lengths. Capacities Dimensions Max. swivel angle [°] 47 Max. working speed [°/s] 45 Max. support weight per arm [kg] 100 Max. Y speed [mm/s] for die width 6 mm for die width 8 mm for die width 10 mm for die width 12 mm for die width 18 mm for die width 20 mm 2.5 3.5 4.0 5.0 6.5 8.5 Weight per arm [kg] 330 Table width [mm] 275 Supported flange length [mm] 1000 Setting range for lower tool height [mm] 30 - 150 Setting range for die width [mm] 6 - 100 Max. workpiece weight in the table extension area [kg] 10 Technical data for the bending aid Tab. 1-6 Note The ram speed is automatically adapted for the chosen die width. T488EN01.DOC Sub-assemblies 1-19 Reduced ram speed Example Die width 6 The smaller the die width of a lower tool, the less vertical travel by the ram is needed to achieve a defined bending angle. Since the swivel motion of the bending aid is synchronized with the vertical travel of the ram and hence is also synchronized or parallel to the motion of the bending flange, the press speed must be reduced for small die widths. Mild steel, bending angle 90° Reduced ram speed [mm/s] 2.5 Travel in case of sheet deformation (from clamping point to Y-nominal) [mm] s = 1 mm s = 2 mm 2.407 - 8 3.5 3.541 3.173 10 4 4.432 3.972 12 5 5.539 4.807 Tab. 1-7 Options for the bending aid The following options are available for the bending aid: • Table extension. • Table widening. • Support table for table length extension. Bending aid with two table widening sections and two table extensions. 1-20 Sub-assemblies Fig. 29651 T488EN01.DOC Support brackets The support brackets assist the operator when processing heavy and unwieldy workpieces. The support brackets are mounted on the same guide system as the bending aid. They can however be detached as required. The support brackets can be used in combination with the bending aid. Support brackets T488EN01.DOC Fig. 38539 Sub-assemblies 1-21 3.5 TASC 6000 control The TASC 6000 control is distinguished by the following features: • Bend sequence calculation. • Tonnage calculation. • Y parallelism calculation (station bending). • Setup plan. • Automatic crowning. • Automatic stop finger positioning. • Pre-selection, number of workpieces. • Axes positioning from the operating station. • Access to bending factors. • 3D visualization. • 2D programming. • Teach function for all axes. • Collision check with visualization. 1-22 Sub-assemblies T488EN01.DOC Control panel 1 2 3 4 5 6 7 8 9 1 User interface / Touch screen 6 STOP button 2 E-STOP impact switch 7 Height adjustment lock 3 Numeric keyboard 8 USB ports 4 Cursor key 9 Keyboard and mouse 5 START button Control panel Fig. 42581 The TruBend Series 5000 can be operated per Touch screen as well as per keyboard/mouse combinations and numerical input fields. In addition to this, two USB ports located on the right side of the panel can be used for data transfer (bending programs / software updates). The operating panel has a large pivot and swing area and can also be adjusted in height. Consequently, the bending space is not obstructed by the panel, allowing the operator to assume an ergonomically correct work position at all times. T488EN01.DOC Sub-assemblies 1-23 Operating station 1 LCD key pad 5 Control lamp 2 EMERGENCY UP foot switch 6 E-STOP release 3 Storage tray 7 RAM DOWN foot switch with 4 E-STOP impact switch Operating station 1-24 Sub-assemblies E-STOP function Fig. 40676 T488EN01.DOC Additional footswitch 1 Connector 4 Indicator lamp 2 EMERGENCY UP foot switch 5 E-STOP impact switch RAM DOWN foot switch with 6 E-STOP release 3 E-STOP function Additional footswitch T488EN01.DOC Fig. 42390 Sub-assemblies 1-25 4. Backgauge The backgauge defines the flange size of a bend. The available backgauge systems are described in brief below. 2-axis backgauge Only parts with bending lines that are parallel to the indexing edge can be bent with the 2-axis backgauge. 2-axis backgauge • • • 4-axis backgauge X drive (forward/back) by means of racks and pinions: high precision and dynamics. R drive (up/down) by means of ball screws. No Z drive (left/right): Stop fingers can only be offset manually. The stop fingers are pneumatically clamped. Only parts with bending lines that are parallel to the indexing edge can be bent with the 4-axis backgauge. 4 -axis backgauge • 1-26 Backgauge Fig. 45301 Fig. 45302 X drive (forward/back) by means of racks and pinions: high precision and dynamics. T488EN01.DOC • • 5-axis backgauge R drive (up/down) by means of ball screws. Z drive (left/right), Z1 and Z2 stop fingers by means of toothed belt drive: high dynamics when positioning light-weight parts. With the 5-axis backgauge, it is also possible to bend parts which have no bending lines parallel to the indexing edge. Backgauge with relative X axis • • • T488EN01.DOC Fig. 45303 X drive (forward/back) by means of racks and pinions: high precision and dynamics. R drive (up/down) by means of ball screws. Z drive (left/right), Z1 and Z2 stop fingers by means of toothed belt drive: high dynamics when positioning light-weight parts. Z2 stop finger can be moved ±75 mm in X direction via CNC control. Backgauge 1-27 6-axis backgauge With the 6-axis backgauge, it is also possible to bend parts which have no bending lines parallel to the indexing edge. 6-axis backgauge • • • Fig. 45304 X drives (forward/back), X1 and X2 by means of racks and pinions: high precision and dynamics. R-drives (up/down), R1 and R2 by means of ball screws. Z-drives (left/right), Z1 and Z2 by means of racks and pinions: high precision and dynamics. The 6-axis backgauge is not available for the TruBend 5050. Technological aspects 2-axis backgauge Bending lines run parallel to the indexing edge. 4-axis backgauge Bending lines run parallel to the indexing edge. 5-axis backgauge Bending lines need not run parallel to the indexing edge in X-direction (horizontal). 6-axis backgauge Bending lines need not run parallel to indexing edge in X and R-direction (horizontal / vertical). Tab. 1-8 1-28 Backgauge T488EN01.DOC 4.1 X axis and R axis Backgauge axis system Dimension R0 refers to the top of the lower tool clamp. In normal bending (Manual mode, Production, Programming), however, the stop finger is always 0.2 – 0.3 mm above R0 (top of lower tool). This means that both the lower tool height and the calculated or adjusted crowning value is taken into account by means of an appropriate zero point offset. This zero offset is not displayed. X0 X+ R+ R0 R- X axis, R axis T488EN01.DOC Fig. 23738 Backgauge 1-29 Z axis 1 2 Z+ Z0 Z2 1 Sheet Z axis Z1 2 Machine bed Fig. 51624 The reference edges for the stop finger positions are at the outside left and right. Clamping (5 and 6 axis backgauge) In the "Clamping" indexing method, the workpiece is aligned exactly against the backgauge in both X and Z directions. The following clamping possibilities are supported: • Clamping on one side • Clamping on both sides Clamping on both sides Clamping functions 1-30 Backgauge Clamping on one side Fig. 35065 T488EN01.DOC 4.2 Technical data: Backgauge X2 X1 R2 R1 Z2 Z1 Axes: Backgauge TruBend Travel range 5050 5085 5850 S 5130 5170 [mm] 600 600 600 600 600 [mm] -50 +200 -50 +200 -50 +200 -50 +200 -50 +200 4 axis [mm] 753 1463 1973 2403 2403 5 axis [mm] 670 1380 1890 2320 2320 6 axis [mm] - 1340 1850 2280 2280 [mm] 860 860 860 860 860 4 /5 axis [mm] 929.5 1640 2150 2580 2580 6 axis [mm] - 1530 2040 2470 2470 X1/X2 axis [mm/s] 0 - 1000 0 - 1000 0 - 1000 0 - 1000 0 - 1000 R1/R2 axis [mm/s] 0 - 330 0 - 330 0 - 330 0 - 330 0 - 330 Z1/Z2 axis [mm/s] 0 - 1000 0 - 1000 0 - 1000 0 - 1000 0 - 1000 X1/X2 axis [mm] 0.04 0.04 0.04 0.04 0.04 R1/R2 axis [mm] 0.08 0.08 0.08 0.08 0.08 Z1/Z2 axis [mm] 0.06 0.06 0.06 0.06 0.06 4/5 axis [mm] 25 25 25 25 25 6 axis [mm] 10 10 10 10 10 Finger – Side 4 axis element 5 axis [mm] 60 60 60 60 60 [mm] 25 25 25 25 25 6 axis [mm] 115 115 115 115 115 X1/X2 axis R1/R2 axis 2 Z1/Z2 axis Max. stop range In X direction In Z direction Speeds Positioning accuracy Distance Fig. 44111 Finger – Finger Technical data: Backgauge 5050 – 5170 Tab. 1-9 2 T488EN01.DOC Reference edge R0 Backgauge 1-31 TruBend Travel range 5170 S 5230 5230 S 5320 [mm] 600 600 600 600 [mm] -50 +200 -50 +200 -50 +200 -50 +200 4 axis [mm] 3393 2403 3393 3393 5 axis [mm] 3310 2320 3310 3310 6 axis [mm] 3270 2280 3270 3270 [mm] 860 860 860 860 4/5 axis [mm] 3570 2580 3570 3570 6 axis [mm] 3460 2470 3460 3460 X1/X2 axis [mm/s] 0 - 1000 0 - 1000 0 - 1000 0 - 1000 R1/R2 axis [mm/s] 0 - 330 0 - 330 0 - 330 0 - 330 Z1/Z2 axis [mm/s] 0 - 1000 0 - 1000 0 - 1000 0 - 1000 X1/X2 axis [mm] 0.04 0.04 0.04 0.04 R1/R2 axis [mm] 0.08 0.08 0.08 0.08 Z1/Z2 axis [mm] 0.06 0.06 0.06 0.06 X1/X2 axis R1/R2 axis 3 Z1/Z2 axis Max. stop range In X direction In Z direction Speeds Positioning accuracy Distance Finger – Finger 4-/5 axis [mm] 25 25 25 25 6 axis [mm] 10 10 10 10 Finger – Side element 4 axis [mm] 60 60 60 60 5 axis [mm] 25 25 25 25 6 axis [mm] 115 115 115 115 Technical data: Backgauge 5170 S – 5320 3 1-32 Backgauge Tab. 1-10 Reference edge R0 T488EN01.DOC 4.3 Stop fingers and stop positions Stop positions for standard stop fingers Standard Option Fig. 32228 The stop fingers of all backgauge systems have three different stop positions: • Stop position 0: Workpiece is indexed at the stop finger. At the max. X position (X = 600), flanges 600 mm long can be indexed. • Stop position 30: Workpiece is placed on the lower support of the stop finger and indexed. At the max. X position (X = 600), flanges 630 mm long can be indexed. • Stop position 260: Workpiece is placed on the upper support of the gauge finger and indexed. At the max. X position (X = 600), flanges 860 mm long can be indexed. • Stop position 400: The workpiece is placed on the upper support of the gauge finger and indexed. At the max. X position (X = 600), flanges 1000 mm long can be indexed 1 1 1 Stop position 1000 mm Fig. 32301 T488EN01.DOC Backgauge 1-33 0 30 260 400 Stop positions 1-34 Backgauge Fig. 44110 T488EN01.DOC Micrometer stop fingers (Option) Micrometer stop fingers are available in 3 different versions: • Micrometer stop fingers for 2-axis backgauge. • Micrometer stop fingers for 4-axis backgauge. • Detachable micrometer stop fingers for 4-axis backgauge. Fig. 45307 Fig. 45305 Fig. 45306 Micrometer stop finger for 2 axis backgauge. Detachable micrometer stop finger for 4-axis backgauge. Micrometer stop finger for 4 axis backgauge. Tab. 1-11 It is possible to use several stop fingers simultaneously. Micrometer stop fingers are ideal when processing workpieces with steps. Travel paths are limited to ±15 mm. T488EN01.DOC Backgauge 1-35 5. TRUMPF BendGuard Note Work at a rapid speed higher than 10 mm/s is permitted only if an opto-electronic safety device is used. The TRUMPF BendGuard is such an opto-electronic safety device. Background In practice, TruBend press brakes are normally loaded by hand. In accordance with the valid safety regulations, the following concepts of operation exist to avoid accidents • Two-hand operation at working speed. Disadvantage: the part must be put down before approaching the bending position; longer cycle times • Foot operation at working speed. Disadvantage: longer cycle times. • Operation with light curtain at rapid speed. Disadvantage: can only be used with certain part geometries. TRUMPF BendGuard TRUMPF BendGuard enables you to work at rapid speed without jeopardizing the safety of the operating personnel and without restrictions in parts handling. TRUMPF BendGuard monitors the area under the upper tool by means of two laser light bands. The rapid downward motion of the ram is halted if the light beams are interrupted. TRUMPF BendGuard is a non-contact safety protection device (BWS) Type 4 according to EN954 with integrated tracking control unit. A safety level in accordance with EN12622 (2001) 5.3.2(f) is achieved. 1-36 TRUMPF BendGuard T488EN01.DOC 14 mm Located at a distance of 4 mm (beam array A) and 14 mm (beam array B) beneath the upper tool tip, two parallel beams of laser light shine in front of the upper tool and provide protection for hands and fingers. The effective overall width of the laser lights is 40 mm, i.e. 20 mm in front of and 20 mm behind the upper tool tip. 4 mm Principle A 1 2 3 B 20 mm 20 mm 1A Monitoring range 1A 2B Monitoring range 2B (in front of the upper tool tip, (with circular cross-section, laser light A) laser light B) 1B Monitoring range 1B 3A Monitoring range 3A (in front of the upper tool tip, (laser light B) (behind the upper tool tip, laser light A) 2A Monitoring range 2A 3B Monitoring range 3B (with circular cross-section, (behind the upper tool tip, laser light A) (laser light B) Laser beam and tools Fig. 31003 With the two 40 mm wide bands of laser light, three areas are monitored at a distance of 4 and 14 mm beneath the upper tool tip: Monitoring range 1 20 mm in front of the upper tool tip. Monitoring range 2 Exactly under the upper tool tip (circular crosssection). Monitoring range 3 20 mm behind the upper tool tip. Tab. 1-12 T488EN01.DOC TRUMPF BendGuard 1-37 BendGuard modes 1-38 TRUMPF BendGuard There are 6 different BendGuard modes: • BendGuard Mode 1: Both laser bands as well as the point-shaped laser beam directly under the tool tip are active during rapid downward ram motion. If either of the two laser lines or the point-shaped beam is interrupted, ram motion stops. • BendGuard Mode 2: Initially, all laser bands are active. The machine stops at the first interruption of laser band B (e.g. by the side wall of a box). The two laser bands front and rear of the tool tip are no longer monitored from here on. The two laser beams with circular cross-section directly under the upper tool tip may not, however, be interrupted. • BendGuard Mode 3: Like BendGuard mode 1, except that the ram stops at the mute point and has to be restarted using the foot switch. • BendGuard Mode 4: Like BendGuard mode 2, except that the ram stops at the mute point and has to be restarted using the foot switch. • BendGuard Mode 5: (BendGuard not active) Downward ram motion only at working speed. • BendGuard Mode 6: (BendGuard not active with stop at mute point) Like BendGuard mode 5, except that the ram stops at the mute point and has to be restarted using the foot switch. T488EN01.DOC Chapter 2 Technology (Application technology) T488EN02.DOC 1. 1.1 1.2 1.3 1.4 1.5 Bending methods: Overview ........................................ 2-3 Air bending....................................................................... 2-3 Coining............................................................................. 2-5 Hemming.......................................................................... 2-7 Flattening ......................................................................... 2-8 Sensor bending................................................................ 2-9 Overview: Sensor bending ....................................... 2-13 Learned bend............................................................ 2-13 2. 2.1 2.2 2.3 2.4 2.5 2.6 Calculations ................................................................. 2-14 Press tonnage................................................................ 2-14 Box height...................................................................... 2-17 Inside radius .................................................................. 2-19 Selecting the die width................................................... 2-21 Shortest flange length.................................................... 2-23 Flat length ...................................................................... 2-26 Calculating the flat length in case of large bend radii ........................................................................... 2-27 Technology (Application technology) 2-1 2.7 2.8 2-2 Calculating the flat length in case of small bend radii ........................................................................... 2-29 Use of the compensation value in the machine controller ................................................................... 2-33 Minimum distances and lengths .................................... 2-34 Different bending flange shapes.................................... 2-35 Technology (Application technology) T488EN02.DOC 1. Bending methods: Overview The following bending methods can be used on machines of the TruBend Series 5000: • Air bending • Coining • Hemming • Flattening • Air bending + ACB 1.1 Air bending Air bending Fig. 34902 Air bending is a frequently used, flexible bending method. In air bending, the workpiece is in contact with the upper and lower tools at three different points: • At the tip of the upper tool. • At both working radii of the lower tool. In air bending, the bent angle is achieved "in air", or "freely". The bending angle is dependent on the material data (material, sheet thickness) and tool data (die widths, working radii). It is determined by the position of the upper tool (depth by which the upper tool plunges into the lower tool). No uniform bend radius is formed in air bending, but rather a curvature line with the smallest curvature in the bending apex. T488EN02.DOC Bending methods: Overview 2-3 Advantages of air bending • • Air bending on the TruBend Any angle between approx. 32° and 180° can be produced without changing tools. Low bending tonnage. Air bending is a path-dependent bending method The ram travels to the programmed Y axis position at the calculated pressure. If the pressure is insufficient, the ram does not reach the lowest nominal Y axis position and stops at the point where the opposing forces are in equilibrium. This is usually the case when the tensile strength and thickness of the material being bent differs considerably from the data used by the control system in its calculations. 2-4 Bending methods: Overview T488EN02.DOC 1.2 Coining Coining Fig. 34903 In coining, the bend angle is produced in a form locking manner, i.e. by pressing the workpiece into a defined form (lower tool, or die). The angles of the upper and lower tools must be identical, they determine the workpiece angle. Important notes on coining • • • • • T488EN02.DOC Coining is used: If the required inside radius of the workpiece is less than the sheet thickness – If holes, cutouts or angled edges are located near or on the bending line. – Extreme contour accuracy (radius RI). Each specific angle and inside radius requires a dedicated tool set (upper and lower tool). Coining requires at least 3 times more tonnage than does air bending, depending on the material and sheet thickness. The cost-efficiency of coining (tool costs/tool set-up time) is often attained only in large-series production. Springback can be influenced only by changing the press tonnage. – Bending methods: Overview 2-5 • Coining on the TruBend The decisive parameters for coining are: – Material. – Sheet thickness. – Inside radius. – Shortest flange length. – Bending angle. – Angle accuracy. – Sheet thickness tolerance. – Max. tensile strength. Coining is the pressure-dependent bending method. The ram descends at a pre-determined pressure until this pressure has been present for at least 0.3 s. This pressure equilibrium should not be achieved until positive contact between upper tool, material and lower tool has been established. For this reason, the nominal Y axis position in coining is approx. 2 mm beneath the bottom of the die (positive locking). If pressure equilibrium sets in before the positive lock is achieved, then the press tonnage has to be increased manually. This is usually the case when the tensile strength and the thickness of the material being bent differs considerably from the data used by the control system in its calculations. 2-6 Bending methods: Overview T488EN02.DOC 1.3 Hemming Hemming Fig. 34901 In hemming, a seam is produced along a sheet edge using special tools (e.g. upper tool OW 210/S and hemming tool FWZ). Important notes on hemming • • As in air bending, hemming is a path-dependent bending method. Hemming is used: – If a seam does not need to be pressed completely flat. – To minimize the counter-bend effect in long seam flanges. – If a defined dimension needs to be produced between the flanges. X X Defined dimension between the seam flanges Fig. 35066 T488EN02.DOC Bending methods: Overview 2-7 1.4 Flattening Flattening Fig. 34900 In flattening, a seam is produced along a sheet edge using special tools (e.g. upper tool OW 210/S and hemming tool FWZ). Important notes on flattening • • Analog to coining, flattening is a pressure-dependent bending method. Flattening is used when a seam is to be pressed completely flat: 1 1 2-8 Teardrop Completely flattened seam Fig. 51627 Counter-bend effect in hemming Fig. 35067 Bending methods: Overview T488EN02.DOC 1.5 Sensor bending Sensor bending with the ACB® angle sensor is based on air bending. To obtain an accurate bend angle in air bending, the workpiece is over-bent by an amount equal to the elastic springback. Several trial bends are usually necessary to determine the exact bending parameters. This can waste time in small lot sizes and does not guarantee that larger lot sizes will stay within the production tolerances. In sensor bending, it is not only the actual value of a bend angle that is measured; different springback angles and varying material properties are also recorded. The nominal value of the bend angle is controlled with the aid of this information. The advantages: • High-precision bend angles through automatic measurement and control, regardless of the … – Grain – Tensile strength – Sheet thickness deviations • Complicated trial runs are no longer necessary. • Less material is used as there are no rejects. • Shorter machining times. The workpieces, having accurate angles, do not need to be refinished or measured for quality assurance. The ACB® angle sensor includes the following: • Sensor module • Sensor tool. • Various accessories (not illustrated). T488EN02.DOC Bending methods: Overview 2-9 1 2 1 Sensor module Angle sensor ACB Angle sensing in the upper tool Sensor tool Fig. 36824 The angle sensing system is integrated in the upper tool and is loaded with the conventional upper tools in the respective bending stations. Sensor tool 2-10 2 Bending methods: Overview Fig. 14869 T488EN02.DOC Four-point measurement with sensor disks Located in the sensor tool are two measuring or sensor disks of different diameters which center themselves in the bending flanges. 4 contact points on the inside of the bend are measured by the disks during the bending process at working speed. The distance between the center points of the disks changes with the penetration depth of the disks. The system continuously calculates the actual angle based on this distance. Four-point measurement by means of sensor disks Two-dimensional angle sensing T488EN02.DOC Fig. 14755 Disk displacement is evaluated two-dimensionally by means of intelligent signal processing. This means that the bending angle as well as a possible tilt angle of the workpiece in X direction are measured. The tilt angle is eliminated as a possible source of error when the actual angle is calculated. Bending methods: Overview 2-11 Technical data Current sensor tools All common standard upper tools. (Special radii on request) Tool width [mm] 25 Max. number of sensor tools per sensor electronic unit 1 Max. number of electronic sensor units per press brake 8 Max. number of sensors per bend 3 Measurement range [°] (dependent on type of sensor, material and sensor disks) 42 - 135 Angle accuracy [°] ±0.3 Tab. 2-1 α1 α3 α5 ±0,3° α2 α4 A B C D E 0 A Pre-bending B Measure springback + monitor the tilt angle C D t Finish bend (required angle + E Measure final angle springback angle) t Time Pressure relief + monitor the tilt angle Schematic sequence of a complete sensor bend 2-12 Bending methods: Overview Fig. 32785 T488EN02.DOC Overview: Sensor bending TASC 6000 settings and programming Function For each bend… • the springback is calculated • the nominal angle regulated • tilting is checked. For the first bend in an active program… • the springback is calculated • the nominal angle regulated • tilting is checked. Each further identical bend (with referral to a reference bend) is bent with angle regulation. The established Y-position for an ACB bend is adopted for each further identical bend (position regulation) For each bend… • the nominal angle is approached with angle regulation, • springback and tilting are not measured. Tab. 2-2 Learned bend In learned bends, bending is accomplished using the Y axis data of a previously completed sensor bend. In this case, the sensor tool has neither a measuring nor a controlling function, i.e. it is not active. It can however remain loaded in the workstation during the bending process. If the sensor bend was performed with 2 sensors, the Y-parallelism correction is also applied. If sensor bending was performed with 3 sensors, the crowning correction will also be applied. Application Taught bending is implemented whenever the same angles in the same grain of the material are required in one single product. This allows for more economical production. A detailed description of learned bends is found in the ACB® angle sensor manual. T488EN02.DOC Bending methods: Overview 2-13 2. Calculations 2.1 Press tonnage The press tonnage for air bending can be calculated using a formula determined empirically by TRUMPF: Press tonnage calculation for air bending Fig. 2857 1.33 × l × Rm × s 2 F= W − (2 × cos 45° × rOW ) 1.33 Frictional resistance between material and lower tool (determined empirically) F Press tonnage [N] l Bend length [mm] Rm Maximum tensile strength of the material [N/mm2] s Sheet thickness [mm] W Die width [mm] rOW Radius of upper tool [mm] cos 45° ≈ 0.7 The formula value (2*cos45°*rOW) has a decisive impact only for large upper tool radii; it can be ignored for TRUMPF standard tools where rOW = 1 mm. 2-14 Calculations T488EN02.DOC The tonnage can also be determined using the TRUMPF bending slide rule or with the press tonnage table: Example: Length of bend 1 m - Sheet thickness 3 mm - Die width 24 mm - Material tensile strength 400 N/mm2 Result: Press tonnage 200 kN TRUMPF Bending slide rule - Front T488EN02.DOC Fig. 35615 Calculations 2-15 Press tonnage table (Material tensile strength 400 N/mm2) s W 6 8 10 12 16 20 24 30 40 50 60 70 80 90 100 120 b 4.5 6 7.5 9 12 15 18 22.5 30 37.5 45 52.5 60 67.5 75 90 Ri 1 1.3 1.6 1.9 2.6 3.2 3.8 4.8 6.4 8 9.6 11 13 14 16 19 0.75 52 39 31 26 1 93 70 56 47 35 1.25 145 109 87 73 55 44 1.5 209 157 126 105 79 63 214 171 143 107 86 71 223 186 140 112 93 291 218 175 145 116 3 314 251 209 168 126 3.5 428 342 285 228 171 137 4 447 372 298 223 179 149 4.5 566 471 377 283 226 189 162 5 466 349 279 233 200 175 6 670 503 402 335 287 251 223 684 547 456 391 342 304 274 715 596 511 447 397 358 298 798 698 621 559 466 1005 894 804 670 1.75 2 2.5 7 8 10 12 Tab. 2-3 W Die width [mm] b Shortest flange length [mm] Ri Inside radius [mm] s Sheet thickness [mm] Tonnage [kN/m] at optimal die width W Example: Result: 2-16 Calculations Sheet thickness s = 3 mm - Die width W = 24 mm Press tonnage F = 209 kN/m T488EN02.DOC 2.2 Box height The maximum box height for a bend angle of 90° can be calculated using the following formula: SHi B OWH Calculating the maximum box height SH i = OWH − B × 0.95 1.414 OWH = SHi Fig. 33329 SH i × 1.414 + B 0.95 Box height (inside) [mm] OWH Upper tool height [mm] B T488EN02.DOC Ram center to outside edge of Modufix = 24 mm Calculations 2-17 The following rounded, maximum box heights result for the standard tool heights: Upper tool height [mm] Maximum box height [mm] 120 65 140 78 220 131 240 145 Tab. 2-4 2-18 Calculations T488EN02.DOC 2.3 Inside radius The inside radius Ri is primarily dependent on the die width W. Given an upper tool radius of 1 mm and a 90° bend angle, this will result in the following inside radius Ri: Ri ≈ 0.16 x W Ri Inside radius [mm] W Die width [mm] The inside radius can also be determined using the TRUMPF bending slide rule: Example: Sheet thickness 3 mm - Die width 24 mm Result: Inside radius (bend radius) 3.8 mm TRUMPF Bending slide rule - Rear T488EN02.DOC Fig. 34663 Calculations 2-19 Press tonnage table (Material tensile strength 400 N/mm2) s W 6 8 10 12 16 20 24 30 40 50 60 70 80 90 100 120 b 4.5 6 7.5 9 12 15 18 22.5 30 37.5 45 52.5 60 67.5 75 90 Ri 1 1.3 1.6 1.9 2.6 3.2 3.8 4.8 6.4 8 9.6 11 13 14 16 19 0.75 52 39 31 26 1 93 70 56 47 35 1.25 145 109 87 73 55 44 1.5 209 157 126 105 79 63 214 171 143 107 86 71 223 186 140 112 93 291 218 175 145 116 3 314 251 209 168 126 3.5 428 342 285 228 171 137 4 447 372 298 223 179 149 4.5 566 471 377 283 226 189 162 5 466 349 279 233 200 175 6 670 503 402 335 287 251 223 684 547 456 391 342 304 274 715 596 511 447 397 358 298 798 698 621 559 466 1005 894 804 670 1.75 2 2.5 7 8 10 12 Tab. 2-5 W Die width [mm] b Shortest flange length[mm] Ri Inside radius [mm] s Sheet thickness [mm] Tonnage [kN/m] with optimal die width W Example: Result: 2-20 Calculations Sheet thickness s = 3 mm - Die width W = 24 mm Inside radius Ri = 3.8 mm T488EN02.DOC 2.4 Selecting the die width The die width of a lower tool depends on the type of material, sheet thickness, upper tool radius, the tool load and on the tonnage required. In practice, die width W is calculated according to the following rule of thumb: W = (6 to 10) x s Sheet thickness s [mm] Die width W [mm] 0.5 - 2.5 6*s 3.0 - 6.0 8*s ≥8.0 10*s Tab. 2-6 The optimum die width can also be determined using the TRUMPF bending slide rule or the tonnage table: Example: Sheet thickness 3 mm Result: Possible die widths (the ones behind which a bending radius is indicated): 16 mm, 20 mm, 24 mm, 30 mm, 40 mm The middle value is the ideal die width (in this case: W = 24 mm). TRUMPF Bending slide rule - Rear T488EN02.DOC Fig. 34663 Calculations 2-21 Press tonnage table (Material tensile strength 400 N/mm2) s W 6 8 10 12 16 20 24 30 40 50 60 70 80 90 100 120 b 4.5 6 7.5 9 12 15 18 22.5 30 37.5 45 52.5 60 67.5 75 90 Ri 1 1.3 1.6 1.9 2.6 3.2 3.8 4.8 6.4 8 9.6 11 13 14 16 19 0.75 52 39 31 26 1 93 70 56 47 35 1.25 145 109 87 73 55 44 1.5 209 157 126 105 79 63 214 171 143 107 86 71 223 186 140 112 93 291 218 175 145 116 3 314 251 209 168 126 3.5 428 342 285 228 171 137 4 447 372 298 223 179 149 4.5 566 471 377 283 226 189 162 5 466 349 279 233 200 175 6 670 503 402 335 287 251 223 684 547 456 391 342 304 274 715 596 511 447 397 358 298 798 698 621 559 466 1005 894 804 670 1.75 2 2.5 7 8 10 12 Tab. 2-7 W Die width [mm] b Shortest flange length [mm] Ri Inside radius [mm] s Sheet thickness [mm] Tonnage [kN/m] with optimal die width W Example: Result: 2-22 Calculations Sheet thickness s = 3 mm Possible die widths (those for which a tonnage is listed): W = 16 mm, 20 mm, 24 mm, 30 mm, 40 mm. The middle value is the ideal die width (in this case W = 24 mm). T488EN02.DOC 2.5 Shortest flange length Determining the shortest flange length Fig. 3856 The following equation can be used to determine the shortest flange length b for a 90° lower tool: b= 2 ×W 2 b Shortest flange length [mm] W Die width [mm] The shortest flange length can also be determined using the TRUMPF bending slide rule or the tonnage table: T488EN02.DOC Calculations 2-23 Example: Sheet thickness 3 mm - Die width 24 mm Result: Shortest flange length 18 mm TRUMPF Bending slide rule - Rear 2-24 Calculations Fig. 34663 T488EN02.DOC Press tonnage table (Material tensile strength 400 N/mm2) s W 6 8 10 12 16 20 24 30 40 50 60 70 80 90 100 120 b 4.5 6 7.5 9 12 15 18 22.5 30 37.5 45 52.5 60 67.5 75 90 Ri 1 1.3 1.6 1.9 2.6 3.2 3.8 4.8 6.4 8 9.6 11 13 14 16 19 0.75 52 39 31 26 1 93 70 56 47 35 1.25 145 109 87 73 55 44 1.5 209 157 126 105 79 63 214 171 143 107 86 71 223 186 140 112 93 291 218 175 145 116 3 314 251 209 168 126 3.5 428 342 285 228 171 137 4 447 372 298 223 179 149 4.5 566 471 377 283 226 189 162 5 466 349 279 233 200 175 6 670 503 402 335 287 251 223 684 547 456 391 342 304 274 715 596 511 447 397 358 298 798 698 621 559 466 1005 894 804 670 1.75 2 2.5 7 8 10 12 Tab. 2-8 W Die width [mm] b Shortest flange length [mm] Ri Inside radius [mm] s Sheet thickness [mm] Tonnage [kN/m] with optimum die width W Example: Result: T488EN02.DOC Sheet thickness s = 3 mm - Die width W = 24 mm Shortest flange length b = 18 mm Calculations 2-25 2.6 Flat length The outside surface of the bend is subjected to tension, i.e. it is stretched during bending, while the inside surface (facing the upper tool) is compressed (inside radius Ri). 1 2 1 Tension (stretching) 2 Compression Fig. 51629 Located between these two areas is the so-called "neutral axis". In a part with small bend radii (R < 20 mm), the neutral axis migrates towards the inside radius (Ri). The run of the "neutral axis" corresponds to the length of a bend part when it is unfolded (flat length). Inside radius 2-26 Calculations The inside radius is decisive for the flat length (length of the flat blank) of a bending part. The inside radius is dependent on the following variables: • Tool parameters – Die width of lower tool – Radius of upper tool • Material parameters – Sheet thickness s – Tensile strength Rm – Grain • Workpiece parameters – Bend angle T488EN02.DOC Example 120 (A) 0 A 40 (A) 35 (B) 110 (B) 34.75 Outside dimension 144.26 B 179.01 Inside dimension S = 5 mm Fig. 51628 Calculating the flat length in case of large bend radii When calculating the flat length for parts with a bend radius 20 mm and greater, one can assume that the "neutral axis" runs through the middle of the sheet cross-section. The flat length L can be calculated with the following formula: L = L1 + L2 + L3 + ... T488EN02.DOC L Flat length [mm] Lx Length of individual segments [mm] Calculations 2-27 Example L2 45° =1 L1 L3 2 R4 Sheet thickness s = 4 mm Calculating the flat length in case of large bend radii L1 L2 = Fig. 38662 = 30 mm π × d ×α 360° = s 2 360° π × 2( R + ) × α L2 = 113.62 mm L3 = 80 mm L = L 1 + L2 + L3 = π × 2(42)mm × (145°) 360° = (30 + 113.62 + 80) mm = 223.62 mm 2-28 Calculations T488EN02.DOC Calculating the flat length in case of small bend radii If the part has a bend radius of ≤20 mm, the "neutral axis" no longer runs precisely through the middle of the sheet cross-section. A compensation value therefore needs to be taken into account when calculating the flat length. b a Fig. 38663 The flat length L can be calculated with the following formula: L=a+b-v T488EN02.DOC L Flat length [mm] a Flange length 1 [mm] b Flange length 2 [mm] v Compensation value [mm] Calculations 2-29 Calculating the compensation value v b Compensation value for opening angle 0° - 90° r β s s.k 2 a Fig. 50534 v = 2(r + s ) − π × v 180° − β s × (r + × k ) 180° 2 Compensation value [mm] r Bend radius [mm] s Sheet thickness [mm] ß Bend angle [°] k Correction factor The correction factor k, a variable of the bend factor v, is calculated using the following formula: k = 0.65 + 0.5 × log 2-30 Calculations r s k Correction factor r Bend radius [mm] s Sheet thickness [mm] T488EN02.DOC Compensation value for opening angle 90° - 165° r β s b s 2 a Fig. 50535 v = 2(r + s ) × tan 180° − β 180° − β s × (r + × k ) −π × 2 180° 2 v Compensation value [mm] r Bend radius [mm] s Sheet thickness [mm] ß Bend angle [°] k Correction factor Correction factor k indicates the deviation of the location of the neutral axis s/2 and is calculated as follows: k = 0.65 + 0.5 × log k r s Correction factor r Bend radius [mm] s Sheet thickness [mm] Note The bend factor v can also be obtained from Supplement 2 of DIN 6935. T488EN02.DOC Calculations 2-31 Compensation value for opening angle 165° - 180° s r β b a Fig. 50536 v=0 v Compensation value [mm] Note The values here for v are minimal, the accuracy suffices in practice. 2-32 Calculations T488EN02.DOC Use of the compensation value in the machine controller The TASC 6000 control accesses the TruToPsBend database for technology data. This database contains the compensation values for all conventional material-tool combinations. These values can be called up in both manual and programming modes. Icons Icon Function / Significance Compensation value, can be overwritten. Compensation value from TRUMPF database. No compensation values present in the database. Tab. 2-9 Retrieving a correction value ¾ Double click the icon to the left of the X-correction input field. Bend allowance / Correction value will be displayed. Note Another double click re-enables the X correction input field. When working with the TruToPsBend Profile Editor, the flat length is calculated on the basis of the tool, material and product angle, and then displayed on the screen. T488EN02.DOC Calculations 2-33 2.7 Minimum distances and lengths When bending parts which in their flat state have a hole or a notch close to the bending line, a minimum distance must be observed between the edge of the hole or notch and the bend itself to avoid deforming the shape of the hole or notch. Workpieces with holes or notches Fig. 1411 The minimum distance x1 (for holes) or x2 (for notches) is calculated as follows: x1 = 0.75 xW x 2 = 0.75 xW x1, x2 Minimum distance of bend from hole or notch [mm] W Die width A quick method for determining the minimum distance in the workshop is to calculate the shortest flange length (see Page 2-23, slide rule, tonnage table). Notches and holes can be produced without deformation if the distance between them and the bending line is greater than the shortest flange length. 2-34 Calculations T488EN02.DOC 2.8 Different bending flange shapes Deformation and compression in the bending zone occur during the bending process and need to be taken into account in the workpiece design. Especially in air bending, such deformation and compression can have a negative impact on the workpiece shape. Correct and incorrect workpiece design Incorrect design: Correct design: 1 2 3 4 Fig. 51630 T488EN02.DOC Calculations 2-35 Number Description Remedy 1. The bending lines should not form any shared points of intersection in the material. This would otherwise hinder tension and compression in the bending zone, resulting in cracks. Notches measuring x = 1.5 x s 2. Avoid edges at an angle to the bending • line. • 3. 4. Instead of a short bending flange y, • move the edge of the other flange back • by an amount equal to x. Instead of the short bending flange y, make the cutout around the bending line. Vertical distance to the bending line, measuring lmin = 0.75 x W Notch the angled edge. xmin = (1 to 1.5) x s Notch the angled edge. xmin = (1 to 1.5) x s Significance: s Sheet thickness [mm] W Die width [mm] • • Tab. 2-10 Note If flange shapes such as those in Nos. 2, 3 and 4 cannot be avoided because of design considerations, then a different bending method should be used – change from air bending to coining. 2-36 Calculations T488EN02.DOC Chapter 3 Tool system T488EN03.DOC 1. Terminology ................................................................... 3-2 2. 2.1 2.2 2.3 2.4 2.5 Tools from TRUMPF ...................................................... 3-3 Tool identification............................................................. 3-3 Upper tools ...................................................................... 3-4 Lower tools ...................................................................... 3-6 Die width ..................................................................... 3-6 Opening angle ............................................................ 3-7 Tools for thin sheets ...................................................... 3-11 System segmentation of tools ....................................... 3-13 3. Laser hardening........................................................... 3-15 4. Imprint-free bending.................................................... 3-16 5. Special tools................................................................. 3-18 Tool system 3-1 1. Terminology 1 2 6 3 4 7 5 8 1 Upper tool (punch) 5 Die width (W) 2 Workpiece 6 Lower tool radius 3 Inside workpiece radius (Ri) 7 Upper tool radius 4 Outside workpiece radius (Ra) 8 Lower tool (die) Fig. 12763 3-2 Terminology T488EN03.DOC 2. Tools from TRUMPF 2.1 Tool identification Identification codes provide information about the tools. The letters identify a certain type of tool or a important tool characteristic. Code Upper tool (punch) OW Upper tool Lower tool (die) UW Lower tool EV Single V die KEV Plastic single-Vee die S Shoulder-bearing tool K Head-bearing tool H Upper tool height R Radius (punch tip) W ZM Narrow die (30° dies are narrow on one side whereas 84° dies are narrow on both sides). Height of lower tool (die) If the letter H is missing, the lower tool height is 100 mm. If only Clamp …/H is specified, then the lower tool height is 150 mm. Code H+number refers to tools with defined special heights. Working radius Die width Any high (>140 mm) special tool with tension spring and Multi-LEDs MF/S Modufix adapter, shoulder-bearing ZE Insert for Z bends Insert for Z bends FWZ Hemming tool MST Torque support ZDL Flattening bar FEV Hemming bar and single-V die Combination lower tool for hemming without I-axis adjustment. Tab. 3-1 T488EN03.DOC Tool system 3-3 2.2 Upper tools OW200/S Upper tools Type OW200 OW200/K Fig. 23589; 23588 Note Both head and shoulder bearing upper tools can be used on the TruBend Series 5000. Upper tool heights Standard upper tools are available in two different heights. Lower upper tools (working height ≤120 mm) are head-bearing, high upper tools (working height ≥220 mm) are shoulder-bearing. In the case of special upper tools, it is not the tool height alone that determines whether the upper tool is head-bearing or shoulderbearing. The press tonnage exerted on the tool is also a decisive factor, in addition to the geometric shape, which might lead to offcenter loads during the bending process. 3-4 Tools from TRUMPF T488EN03.DOC Shoulder-bearing tool Head-bearing tool Tool types Fig. 35647, 35648 Note In upper tool type OW210/S, both punches, the higher and the lower one, are shoulder-bearing. OW 210/S H240 Upper tools OW 210/S Load-bearing capacity of upper tool clamp • • • T488EN03.DOC OW 210/S H140 Fig. 22942; 22882 When using head-bearing upper tools, the tool clamping can be loaded with maximum 1350 kN/m. In the case of shoulder-bearing upper tools, the tool clamping can be loaded with maximum 1870 kN/m. Higher loads apply for tool lengths greater than 500 mm: – head-bearing upper tools: max. 1800 kN/m. – shoulder-bearing upper tools max. 2500 kN/m. Tool system 3-5 2.3 Lower tools Overview of lower tools EV 001 EV 001/H EV001/S Lower tools KEV ... Fig. 31183; 31182; 33330; 33331 Die width Where the die width is concerned, a distinction is made between the nominal width and the width which is relevant for calculating the penetration depth. Nominal width The nominal width is specified on the lower tool, e.g. W = 6 for EV001. The nominal width is measured at the point where the radius of the lower tool becomes the straight line of the V-opening. Technically important width for penetration depth This width Wt is measured at the intersecting point of the tangents. The difference between the nominal width and the technical die width becomes more obvious the larger the working radii are. Note The Wt value is calculated by the control based on the lower tool data and factored in for bend sequence calculation. ⎛ ⎛α ⎞ ⎛ α ⎞⎞ Wt = W + 2 × tan⎜ ⎟ × R × ⎜⎜1 − sin ⎜ ⎟ ⎟⎟ ⎝2⎠ ⎝ 2 ⎠⎠ ⎝ 3-6 Tools from TRUMPF T488EN03.DOC Wt W R α W Specified die width = nominal width Wt Technically important width for calculating the penetration depth Die width Fig. 33333 Opening angle TRUMPF lower tools come with 5 different opening angles: • 30° • 80° • 84° • 86° • 90° The question of which opening angle needs to be used depends on the application in question. 30° lower tool In air bending, a lower tool with an opening angle of 30° is usually utilized. Maximum bending flexibility is achieved with this kind of tool because (providing the corresponding upper tool is available) any angle between 180° and almost 30° can be bent. 30° lower tools are available in widths W = 4 mm to 24 mm. The tools with die widths W = 4 mm and 5 mm are thin sheet tools designed for sheet thickness s ≤1 mm, see page 3-11. T488EN03.DOC Tool system 3-7 Lower tool Die width W [mm] EV/S-W4/30° 4 EV/S-W5/30° 5 EV001 6 EV002 8 EV003 10 EV004 12 EV005 16 EV006 20 EV007 24 Tab. 3-2 80° lower tool Lower tools with an opening angle of 80° are used for thick sheets, allowing angles ≥90° to be bent. When bending thick material, the springback can be so great that coining would result if a 84° lower tool were used for producing 90° angles. This can cause two problems: • The required Y axis position is not attained after an angle correction is made while air bending. • The ACB® angle sensor cannot be used. 80° lower tools are available in die widths W = 24 mm to 100 mm. Lower tool Die width W [mm] EV W24/80° 24 EV W30/80° 30 EV W40/80° 40 EV W50/80° 50 EV W60/80° 60 EV W70/80° 70 EV W80/80° 80 EV W90/80° 90 EV W100/80° 100 Tab. 3-3 3-8 Tools from TRUMPF T488EN03.DOC 84° lower tool Lower tools with an opening angle of 84° are used to bend workpieces containing holes or cutouts near the bending line, (distance ≤ shortest flange length). The holes/cutouts are not deformed in the process (see Chapter 2). Only ≥90° angles can be bent with 84° lower tools. The 84° lower tool is suitable for use with the ACB® sensor in all conventional materials (mild steel, stainless steel, aluminum). 84° lower tools are available in die widths W = 4 mm to 20 mm. The lower tools with die widths W = 4 mm and 5 mm are thin sheet tools for sheet thicknesses s ≤1 mm, see page 3-11. Lower tool Die width W [mm] EV/S-W4/84° 4 EV/S-W5/84° 5 EV W8/84° 8 EV W10/84° 10 EV W12/84° 12 EV W16/84° 16 EV W20/84° 20 Tab. 3-4 86° lower tool Lower tools with an opening angle of 86° are the predecessors of the 84° lower tools. However, as the springback is so great when bending stainless steel and various aluminum alloys, coining is performed with an 86° lower tool to produce a 90° angle. The ACB® angle sensor cannot be utilized in such cases. 86° lower tools are available in die widths of W = 6 mm to 50 mm. Note: A coining effect is achieved when 80°, 84° and 86° lower tools are used for bending 90° angles. T488EN03.DOC Tool system 3-9 Lower tool Die width W [mm] EV020 6 EV021 8 EV022 10 EV023 12 EV024 16 EV025 20 EV026 24 EV027 30 EV028 40 EV029 50 Tab. 3-5 Note 86° lower tools should now be purchased only in order to supplement an existing set of tools. When purchasing new tools, preference should instead be given to 84° lower tools. 90° lower tool Lower tools with an opening angle of 90° are used for coining. 90° lower tools are available in die widths W = 4 mm to 16 mm. The lower tools with die widths W = 4 mm and 5 mm are thin sheet tools for sheet thickness s ≤1 mm, see page 3-11. Lower tool Die width W [mm] EV/S-W4/90° 4 EV/S-W5/90° 5 EV040 6 EV041 8 EV042 10 EV043 12 EV044 16 Tab. 3-6 3-10 Tools from TRUMPF T488EN03.DOC 2.4 Tools for thin sheets Tools for thin sheets offer the highest precision in conjunction with narrow die widths in sheet thickness ≤1 mm. Advantages • • The small upper tool radii and small die widths make the smallest bending radii possible. Thanks to the slim tool geometry, short flange lengths can also be achieved. Bending with thin sheet tools T488EN03.DOC Fig. 31178 Tool system 3-11 Upper tool There are 3 upper tools for thin sheets, 2 of which are upper tool inserts for tool holders OW/K 80 and OW/K 130: • OW280/K (complete tool). • OW390 (upper tool insert). • OW391 (upper tool insert). All thin sheet tools are head-bearing, regardless of the working height. Upper tool Working height [mm] OW280/K 140 OW390 170 (with OW/K 80) 220 (with OW/K130) OW391 170 (with OW/K 80) 220 (with OW/K130) Tab. 3-7 Lower tool For thin materials, lower tools are offered with die widths of W = 4 mm and 5 mm and opening angles of 30°, 84° and 90°. These lower tools come only in a narrow version (see Page 3-6) in order to produce narrow Z bends. 3-12 Tools from TRUMPF T488EN03.DOC 2.5 System segmentation of tools Tools are available in different segmentations and lengths. With the system segmentations A and B offered, any bending length, from 25 mm all the way to the bending length of the machine, can be produced in 5 mm increments. In addition to this, upper tools are also available in left gooseneck and right gooseneck versions. Gooseneck tools are 100 mm long. Tool sets: Length [mm], variant Segment, standard dimension: Length [mm] 25 30 35 40 45 50 100 H100L 1 H100R 200 2 3002 5002 Basic division 250 2 1 1 1 1 1 1 - - - - - 1250, A 2 1 1 1 1 1 8 1 1 - - - 1250, B 2 1 1 1 1 1 1 1 1 2 1 - 2050, A 2 1 1 1 1 1 16 1 1 - - - 2050, B 2 1 1 1 1 1 1 1 1 1 1 2 2550, A 2 1 1 1 1 1 21 1 1 - - - 2550, B 2 1 1 1 1 1 1 1 1 1 1 3 3050, A 2 1 1 1 1 1 26 1 1 - - - 3050, B 2 1 1 1 1 1 1 1 1 1 1 4 4050, A 2 1 1 1 1 1 36 1 1 - - - 4050, B 2 1 1 1 1 1 1 1 1 1 1 6 Tab. 3-8 1 2 T488EN03.DOC Gooseneck tools (H100L, H100R) are available only in upper tool sets. In lower tool sets, gooseneck tools are substituted by 2 lower tools, each 100 mm in length. The max. weight of the segments is limited to 25 kg. If this weight is exceeded, the respective tools are replaced by shorter (=lighter) segments. Tool system 3-13 System segmentation versions All tools can be ordered either as complete tool sets or as single tools. The following tool set versions are possible: • Basic segmentation 250 mm. • Tool sets 1250 mm, 2050 mm, 2550 mm, 3050 mm or 4050 mm: – System segmentation version A: Longest tool 100 mm (see Tab. 3-8, Page 3-13). – System segmentation B: Longest tool max. 500 mm (see Tab. 3-8, Page 3-13). Locking element "Safety-Click" 3-14 Tools from TRUMPF All upper tools up to 100 mm in length are equipped with "SafetyClick". "Safety-Click" is a safety locking mechanism integrated in the tool to prevent it from falling out of the tool holder. The lock can be released by pressing a button. • The upper tool can be exchanged vertically - quickly but still safely. • Shorter tool set-up times as the tools no longer have to be removed sideways out of the upper tool holder. T488EN03.DOC 3. Laser hardening TRUMPF tools are laser-hardened. Thanks to the use of a TRUMPF TruFlow high-powered laser with innovative special hardening optics, a greater hardening depth and a wider hardened zone are achieved as compared to earlier laser hardening methods: • Degree of hardness 63-64 HRC. • Hardening depth 3-4 mm. Hardened work zones Safety of laser-hardened tools Fig. 33334 Only the surface of the tool is hardened in laser hardening; the interior of the tool remains "soft". The tool does not splinter under excessive load; instead, either the tool splits or the hard layer is pressed into the soft core. T488EN03.DOC Tool system 3-15 4. Imprint-free bending During bending, imprints and abrasion result on the workpiece at the support points of the lower tool. In order to avoid marks and abrasion on high-quality or painted sheets and on visible parts, one can choose among the following standardized technologies: • Use a KEV die. • Use bending foil. • Use lower tools with radius R = 3 mm (e.g. with foil-coated sheets). KEV die Bending foil Fig. 33340; 33338 KEV die In the case of KEV dies, a plastic strip is inserted in the area of the radius so that the workpiece lies on the plastic strip and not on metal. This prevents marks on the workpiece due to friction between metal (die) and metal (workpiece). Die Die width W [mm] KEV W8/30° 8 KEV W10/30° 10 KEV W12/30° 12 KEV W16/30° 16 KEV W20/30° 20 KEV W24/30° 24 Tab. 3-9 Note As a general rule, the service life of the plastic strips is considerably greater if calculations are made with the formula W = ≥8*s when selecting the die width. 3-16 Imprint-free bending T488EN03.DOC Bending foil The bending foil is made of plastic, 0.4 mm thick and 100 mm wide. It is laid loosely over the lower tool and for that reason is able to prevent marks on the workpiece which could arise from the rubbing of metal against metal. Bending with bending foil Fig. 33339 Note As a rule, the bending foil lasts much longer if calculations are made with the formula W = ≥8*s when selecting the die width. Lower tool with Radius R = 3 mm Lower tools with standard radii are of limited suitability for bending film-coated sheets without bending marks being visible on the workpiece surface after the foil has been removed. The danger when using lower tools with standard radii is that the foil may be cut through, leaving imprints on the workpiece. A lower tool with a radius of R = 3 mm can be used in such cases. Thanks to the large radius, the foil on the workpiece will not be destroyed. Note The shortest flange length that can be bent increases if a lower tool with a larger radius is used (see Chapter 2). T488EN03.DOC Tool system 3-17 5. Special tools Customized special tools can be designed in collaboration with TRUMPF at any time. A wide array of special tool solutions are listed and illustrated in the "TruBend - Working examples for bending tools" technical information brochure. 3-18 Special tools T488EN03.DOC Index 2 A 2-axis backgauge ...................................... 1-26 Air bending................................................... 2-3 • Press tonnage ..................................... 2-14 3 30°lower tool................................................ 3-7 4 4-axis backgauge ...................................... 1-26 5 5-axis backgauge ...................................... 1-27 6 6-axis backgauge ...................................... 1-28 8 80°lower tool................................................ 3-8 84°lower tool................................................ 3-9 86°lower tool................................................ 3-9 B Backgauge ................................................. 1-26 • 2-axis backgauge ................................ 1-26 • 4-axis backgauge ................................ 1-26 • 5-axis backgauge ................................ 1-27 • 6-axis backgauge ................................ 1-28 BendGuard................................................. 1-36 • Mode.................................................... 1-38 • Safety concept..................................... 1-36 Bending • imprint-free .......................................... 3-16 Bending aid ................................................ 1-19 • Options ................................................ 1-20 Bending flange shapes .............................. 2-35 Bending foil ................................................ 3-17 Bending method • 0............................................................. 2-3 • 1............................................................. 2-5 • 11........................................................... 2-8 • 3............................................................. 2-9 • 4........................................................... 2-13 • Air bending ............................................ 2-3 • Coining .................................................. 2-5 • Flattening with coining........................... 2-8 • Learned bend ...................................... 2-13 • Sensor bending ..................................... 2-9 Bending slide rule .......... 2-15, 2-19, 2-21, 2-24 Box height .................................................. 2-17 • maximum ............................................. 2-17 C 9 90° lower tool............................................. 3-10 T488EN04.DOC Coining......................................................... 2-5 • Press tonnage ....................................... 2-5 Crowning.................................................... 1-12 Index 0-1 D L Die ............................................................... 3-2 Die width ...................................... 2-23, 3-2, 3-6 • Selection ............................................. 2-21 Downstroking drive .................................... 1-10 Laser hardening ......................................... 3-15 • Degree of hardness............................. 3-15 • Hardening depth.................................. 3-15 Learned bend............................................. 2-13 Load-bearing capacity.................................. 3-5 Lower tool .............................................3-2, 3-6 • Coining ................................................ 3-10 • Designation............................................ 3-6 • Die width................................................ 3-6 • Opening angle ....................................... 3-7 • Radius ................................................... 3-2 • Radius 3 .............................................. 3-17 • Thick sheet ............................................ 3-8 • Thin sheet............................................ 3-12 Lower tool adjustment................................ 1-14 F Flange length.................................... 2-23, 3-17 Flat length .................................................. 2-26 • Calculation by the control.................... 2-33 • Large bend radii .................................. 2-27 • Small bend radii .................................. 2-29 Flattening • Flattening front .................................... 1-16 • Flattening rear ..................................... 1-17 Flattening with coining ................................. 2-8 M Gooseneck tools........................................ 3-13 Machine • Speeds ...........................................1-4, 1-5 Machine bed .............................................. 1-12 Machine dimensions .............................1-4, 1-5 Machine frame ............................................. 1-8 H O Height • Upper tool.............................................. 3-4 Operating station........................................ 1-24 G I I axis .......................................................... 1-14 Identification ................................................ 2-9 Imprint-free bending .................................. 3-16 Inside radius .............................................. 2-19 P Press tonnage............................................ 2-14 Press tonnage table ....... 2-16, 2-20, 2-22, 2-25 Punch ........................................................... 3-2 R K KEV die...................................................... 3-16 0-2 R axis ......................................................... 1-29 Ram............................................................ 1-10 Regulation.................................................... 2-9 T488EN04.DOC S U Safety concept........................................... 1-36 Safety element "Safety-Click".................... 3-14 Sensor bending ........................................... 2-9 Sensor tool................................................... 2-9 Special tools .............................................. 3-18 Speeds.................................................. 1-4, 1-5 • Press speed ................................... 1-4, 1-5 • Rapid speed ................................... 1-4, 1-5 • Rapid up speed .............................. 1-4, 1-5 Support brackets ....................................... 1-21 Upper tool .............................................3-2, 3-4 • Height .................................................... 3-4 • Load-bearing capacity ........................... 3-5 • Radius ................................................... 3-2 • Thin sheet............................................ 3-12 Upper tool height........................................ 2-17 W T Technical data • Bending aid ......................................... 1-19 Thin sheet tool • Lower tool............................................ 3-12 • Upper tool............................................ 3-12 Tool.............................................................. 3-2 • Length ................................................. 3-13 • Locking element .................................. 3-14 • Lower tool....................................... 3-2, 3-6 • System segmentation ......................... 3-13 • Tools for thin sheets............................ 3-11 • Upper .................................................... 3-4 • Upper tool.............................................. 3-2 Tool holder................................................. 1-13 Tool lengths ............................................... 3-13 Tool:........................................................... 3-13 Tools for thin sheets .................................. 3-11 T488EN04.DOC Working height ......................................1-4, 1-5 Workpiece .................................................... 3-2 • Minimum distance ............................... 2-34 • Minimum length ................................... 2-34 Workpiece radius ......................................... 3-2 X X axis ......................................................... 1-29 Z Z axis.......................................................... 1-30 0-3