The Un-Tunable PID Control Loop
Best-Practices and Innovations for Tuning Oscillatory, Noisy and Long Dead-Time Processes
Robert Rice
Vice President, Engineering
March 2015
PUBLIC
www.rockwellautomation.com www.us.endress.com
PUBLIC
Agenda
Economic Drivers
Real-World Challenges
Tuning Demystified
Real-World Successes
Closing Thoughts
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Economic Drivers
Process Automation: A State-of-the-State Assessment
The Amazing Problem-Free Plant
Michael Brown Control Engineering
85% of controllers perform inefficiently when operated in automatic mode
65% of controllers are poorly tuned to mask control-related problems
30% of PID control loops are operated in manual mode
20% of control systems are not properly configured to meet their objectives
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Economic Drivers
Top Line and Bottom Line Benefits
Invest in Control – Payback in Profits
Carbon Trust
2 – 5%
Production
Throughput
PUBLIC
5 – 10%
Production
Yield
5 – 15%
25 – 50%
Energy
Consumption
Production
Defects
CHICAGO PROCESS SOLUTIONS SUMMIT
Economic Drivers
Missed Opportunities for Financial Gain
Annual Production & Efficiency Losses
Control Station, Inc.
PUBLIC
$7.6 Million
$5.0 Million
$1.8 Million
$8.0 Million
Basic
Materials
Chemicals
Power
& Utilities
Oil & Gas
CHICAGO PROCESS SOLUTIONS SUMMIT
Agenda
Economic Drivers
Real-World Challenges
Tuning Demystified
Real-World Successes
Closing Thoughts
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Real-World Challenges
The ‘Black Art’ of PID Controller Tuning
Limited Education
Chemical Engineering curriculum
Single semester totaling 16 hours
Not covered by most trade schools
Focus on PLC programming
Limited Experience
Few staff tasked with PID tuning
Methods handed down
No formalized approach or methodology
Out-of-the-box parameters applied
Limited Emphasis
Other projects deemed more important
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Real-World Challenges
The Devil is in the Data
Noise
Wait for it…
PUBLIC
Oscillations
Wait for it…
CHICAGO PROCESS SOLUTIONS SUMMIT
Dead-Time
Real-World Challenges
Where to Turn?
Economic drivers
Clear opportunities for improvement
Strong financials: Payback, ROI
Training & experience
Limited skilled resources
Pool of candidates drying up
Traditional ‘state-of-the-art’ software
Struggles under ‘real-world’ conditions
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Agenda
Economic Drivers
Real-World Challenges
Tuning Demystified
Real-World Successes
Closing Thoughts
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
PID Controller Tuning
Demystifying the Process
Find
Step
Model
Tune
Test
Identify the
Controller and
Specify the DLO
and Control
Objective
Perform a
“Bump Test”
and Collect
Dynamic
Process Data
Fit a Model
to the
Process
Data
Use Tuning
Correlations to
Calculate
Tunings Based
on Model
Implement and
Test results
11
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Document
Document the
Tuning
Process
Tuning Demystified
Tuning Recipe: A Simplified, Repeatable Process
How do you identify PID control loops that need to be tuned?
Reactive: Respond to the Operator’s Needs
Proactive: Analyze Process Data to Identify PIDs that Contribute to Increased
Process Variability
Proactive monitoring should:
PUBLIC
Identify Mechanical, Process and Controller Tuning Issues
Facilitate Root-Cause Detection
Recommend Appropriate Corrective Action
Track and Report Findings
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 1: Find Controller, Specify Objective
Good Control is “SIMPLE”
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 1: Find Controller, Specify Objective
Reflux Drum – Level Control Example
What is/are the primary Control Objective(s)?
PUBLIC
Maintain Liquid Level In the Reflux Drum
Maintain Column Stability
Prevent Environmental Release by Avoiding Drum Hi Limit
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 2: Step or Bump the Process
Data should show “Cause and Effect”
A bump test must generate a
response that clearly dominates
the random (noisy) PV behavior
PUBLIC
Here the PV moves approximately
four (4) times the noise band – a
good value
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 2: Step or Bump the Process
Good bump tests
Open loop tests require the
Controller Output to be stepped
PUBLIC
Closed loop tests require a sharp
Controller Output change
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 2: Step or Bump the Process
Bad bump tests
AVOID Disturbance-Driven Data & Slow Ramping CO Changes
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 2: Step or Bump the Process
Types of process behavior
Self-Regulating
PUBLIC
If all inputs are held constant, the
process will seek a steady-state
Example: Heat Exchanger
Non Self-Regulating
Process will only reach a steadystate at its ‘balancing’ point
Example: Surge Tank
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 2: Step or Bump the Process
Simple First Order Models
Self-Regulating
Non Self-Regulating
∗
·
KP ⇨ Process Gain [ PV
]
CO
ƬP ⇨ Time Constant [time]
·
PV
KP* ⇨ Integrator Gain [ time·CO
]
θP ⇨ Dead-Time [time]
θP ⇨ Dead-Time [time]
“All models are wrong, some are useful”
George Box
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 3: Fit a Process Model
First Order Plus Dead-Time (Self-Regulating Model)
Process Gain
How Far
How Far does the
PV Move for
Change in the
Output
Process Time
Constant
How Fast
How Fast does it
take the PV to
reach 63% of its
total change
PUBLIC
63%∆
∆
∆
Process DeadTime
How Much Delay
How much delay is
there from when
the CO is changed
until the PV first
moves
CHICAGO PROCESS SOLUTIONS SUMMIT
∆
∆
Tuning Demystified
Step 3: Fit a Process Model
First Order Plus Dead-Time (Non Self-Regulating Model)
Integrating
Process Gain
How Far and
How Fast
How Far and How
Fast does the PV
Move when the CO
is moved from its
balancing point Process Dead-Time
How Much
Delay
How much delay is
there from when the
CO is changed until
the PV first moves
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 3: Fit a Process Model
Tunings are only as good as the model
Manual or Auto-Tune Approaches
Sufficient for Simplest of Controllers
Software Modeling Much More Robust
Open Loop and Closed Loop
Noisy and Non-Steady State (NSS) Conditions
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 4: Tune the PID Control Loop
1
First compute, ƬC, the Closed Loop Time Constant
A small ƬC provides an aggressive or quick response
Choose your performance using these rules:
Aggressive:
Moderate:
Conservative:
ƬC is the larger of 0.1Ƭp or 0.8θp
ƬC is the larger of 1Ƭp or 8θp
ƬC is the larger of 10Ƭp or 80θp
PI tuning correlations use this
and the FOPDT model values:
and
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 4: Tune the Level PID Control Loop
IMC tuning correlation: Depending PID, Non Self-Regulating Process
1
The Closed Loop Time Constant, , should be as large as possible but
still fast enough to arrest or recover from a major disturbance.
PI tuning correlations use this and the FOPDT Integrating model values:
2
1
∗
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
2
Tuning Demystified
Step 4: Tune the PID Control Loop
Closed Loop Time Constant rules of thumb:
Flow Loops
Pressure Loops
2 to 4 times the Open Loop Time Constant,
Temperature Loops
PUBLIC
3 to 5 times the Open Loop Time Constant,
1 to 3 times the Open Loop Time Constant,
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 4: Tune the PID Control Loop
Expected PI Controller Response:
Conservative
Moderate
Set Point tracking (servo) response as
Aggressive
changes
Copyright © 2007 by Control Station, Inc. All Rights Reserved.
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 4: Tune the PID Control Loop
Challenges of PI Control: Self-Regulating Processes
Kc*2
Base Case Performance
Kc
Kc/2
2
Copyright © 2007 by Control Station, Inc. All Rights Reserved.
Ti/2
PUBLIC
Ti
CHICAGO PROCESS SOLUTIONS SUMMIT
Ti*2
Tuning Demystified
Step 4: Tune the PID Control Loop
Challenges of PI Control: Non Self-Regulating Processes
Kc*2
Kc
Kc/2
Ti/2
PUBLIC
Ti
CHICAGO PROCESS SOLUTIONS SUMMIT
Ti*2
Tuning Demystified
Step 4: Tune the PID Control Loop
PI vs. PID Set Point tracking response
PUBLIC
PID shows decreased oscillations
compared to PI performance
PID has somewhat:
Shorter Rise Time
Faster Settling Time
Smaller Overshoot
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 5: Implement and Test Results
Modified tuning parameters must be tested
Testing PID Controllers Typically
Involve:
Adjust Set-Point to ensure adequate
tracking
Did the Process Variable overshoot?
Did the Controller Output move too
much?
Introduce a Load Change or Disturbance
Did the Process Variable recover quick
enough?
NOTE: PID controllers work off of controller error (SP-PV). If there is no error, there is nothing for
the PID controller to do. You MUST introduce controller error and force the controller to respond
before it can be determined if the tuning changes actually improved the system.
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Step 6: Document, Document, Document
Who:
Who is accountable for the change(s)?
What:
Which loop was tuned? What were the
‘As Found’ and ‘Recommended’ tuning
values?
When:
When was the loop adjusted?
Why:
Why was this particular loop tuned?
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Tuning Demystified
Industrial-Grade Software for Real-World Applications
How do you identify PID control loops that need to be tuned?
Reactive: Respond to the Operator’s Needs
Proactive: Analyze Process Data to Identify PIDs that Contribute to Increased
Process Variability
Proactive monitoring should:
PUBLIC
Identify Mechanical, Process and Controller Tuning Issues
Facilitate Root-Cause Detection
Recommend Appropriate Corrective Action
Track and Report Findings
CHICAGO PROCESS SOLUTIONS SUMMIT
Agenda
Economic Drivers
Real-World Challenges
Tuning Demystified
Real-World Successes
Closing Thoughts
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Case Study: Praxair
Continuous Improvement & Process Optimization
Praxair, Inc.
The largest industrial gases company in
North and South America and one of the
largest worldwide.
Over 400 Cryogenic Plants Worldwide
On-stream reliability of 99%
Standardized on Rockwell Automation
Process Controllers
Standardized on LOOP-PRO TUNER PID
tuning software across all regions
The following 2 PID controllers alone
contributed between $75K-$100K USD /
year of savings
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
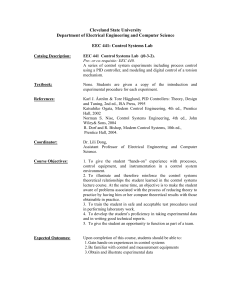
Case Study: Known Underperformers
Continuous Improvement & Process Optimization
Impact
Stable control at lower value
Savings: ~1% higher process
efficiency
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
BEFORE
0:01
1:37
3:13
4:49
6:25
8:01
9:37
11:13
12:49
14:25
16:01
17:37
19:13
20:49
22:25
100
90
80
70
60
50
40
30
20
10
0
100
90
80
70
60
50
40
30
20
10
0
AFTER
0:01
1:31
3:01
4:31
6:01
7:31
9:01
10:31
12:01
13:31
15:01
16:31
18:01
19:31
21:01
22:31
Example #1: LIQUID LEVEL CONTROL
Instability occurred at lower levels making
PID tuning difficult
Control the level at a reasonable value
(i.e. lower is better)
Before: Highly noisy PV
Process safety and efficiency impact
Case Study: Known Underperformers
Continuous Improvement & Process Optimization
Change PID loop from Manual to
Auto; Stabilize control at higher SP
Savings: >2% product recovery
increase
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
0:01
0:24
0:47
1:10
1:33
1:56
2:19
2:42
3:05
3:28
3:51
4:14
4:37
5:00
5:23
5:46
100
90
80
70
60
50
40
30
20
10
0
100
90
80
70
60
50
40
30
20
10
0
SP
PV
OT
0:01
0:24
0:47
1:10
1:33
1:56
2:19
2:42
3:05
3:28
3:51
4:14
4:37
5:00
5:23
5:46
Example #2: MIXING VALVE CONTROL
Mix two flows with different specifications
(higher is better)
Before: Poor tuning. Once in Auto, nearly
tripped the plant. As a result, most of time in
Manual, with low PV.
Process safety and low product recovery impact
Impact
PlantESP – TuneVue™
Continuously Watches for Suitable Data For Analysis and Recommends
Tunings Parameters
Including SP Changes, Manual Bump Tests
No configuration required for setting noise limits, minimum step size or window length
Model Fits are Generated using full Non Steady State (NSS) Modeling
Innovation
Tuning Parameters Generated for each loop based on the criteria specified
by the user (Fast/Slow, Slider Bar)
Reports/Alerts Generated based on Deviation from Recommended Tunings
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Case Study
Models and Tuning Range Automatically Determined
Level Control of Medium Pressure
Steam Separator
TuneVue Used Existing Set-Point
Changes to Identify A Suitable
Tuning Parameter Range
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Agenda
Economic Drivers
Real-World Challenges
Tuning Demystified
Real-World Successes
Closing Thoughts
PUBLIC
CHICAGO PROCESS SOLUTIONS SUMMIT
Closing Thoughts
Demystify PID controller tuning
Apply a proven, repeatable recipe
Integrate the procedure with existing processes
Apply ‘industrial-grade’ technologies
Eliminate the steady state requirement
Leverage advanced heuristics
Proactively address performance issues
PUBLIC
Improve plant-wide awareness
Identify problems, isolate root-causes
CHICAGO PROCESS SOLUTIONS SUMMIT
Questions
Robert Rice, PhD
Vice President, Engineering
November 2014
PUBLIC
www.rockwellautomation.com www.us.endress.com
PUBLIC