Automatic tuning of Electro-Optical Director
advertisement

Automatic tuning of Electro-Optical
Director
MARCUS BERNER
Masters’ Degree Project
Stockholm, Sweden June 2009
XR-EE-RT 2009:012
Abstract
Directors designed for observation and fire control in naval environments
consist of a mechanical pedestal moved by two electrical motors. To meet
the high demands on director precision, a servo solution based on feedback
control is used. The digital servo controller has to be tuned to meet demands
on performance and stability. This report presents methods for automatic
tuning, intended to replace today’s manual tuning procedures. System identification based on relay feedback and recursive least-squares approximations
are combined with the Ziegler-Nichols and AMIGO tuning procedures for
PI controllers are evaluated.
Evaluations are performed in simulations, for which a SIMULINK model
is constructed. Results indicate that the automatic tuning may perform well
compared to the manual tuning used today, and that it could bring considerable reduction in the time required for tuning.
Keywords– Automatic tuning, Relay feedback, Recursive Least Squares
approximation, Ziegler-Nichols, AMIGO, Anti-windup
1
Acknowledgements
I would like to thank both my supervisor Fredrik Södersröm at Saab Systems
and my examinator Mikael Johansson at KTH for all the support and good
feedback during the project.
Contents
1 Introduction
1.1 Auto-tuning . . . . . . . . . . . .
1.2 Problem formulation . . . . . . .
1.3 System Overview . . . . . . . . .
1.3.1 Director structure . . . .
1.3.2 Servo sensors . . . . . . .
1.3.3 Servo system architecture
1.4 Thesis outline . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
8
9
9
10
11
11
2 Modeling
2.1 Controller . . . . . . . . . . . . . . . .
2.2 Motors . . . . . . . . . . . . . . . . . .
2.3 Commutation routine . . . . . . . . .
2.4 Motor control electronics . . . . . . . .
2.5 One-phase motor equivalent . . . . . .
2.6 Mechanics . . . . . . . . . . . . . . . .
2.7 Decoupled SISO model . . . . . . . . .
2.8 Resonances due to non-stiff mechanics
2.9 Disturbances . . . . . . . . . . . . . .
2.9.1 Ship movements . . . . . . . .
2.9.2 Wind . . . . . . . . . . . . . .
2.9.3 Friction torque . . . . . . . . .
2.10 Measurement Noise . . . . . . . . . . .
2.10.1 Gyro signal noise . . . . . . . .
2.10.2 Resolver signal noise . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
13
13
14
16
18
20
21
22
23
24
24
24
26
26
26
32
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3 Model Validation
34
3.1 Triangular wave input . . . . . . . . . . . . . . . . . . . . . . 34
3.2 Relay feedback test . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3 Step response . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2
CONTENTS
3
4 System identification
4.1 Identification of frequency response with a frequency response
analyzer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Relay feedback identification . . . . . . . . . . . . . . . . . .
4.2.1 Additional time delay due to sampling . . . . . . . . .
4.2.2 Recursive frequency and amplitude estimation . . . .
4.2.3 Oscillation estimation convergence . . . . . . . . . . .
4.2.4 Results from simulation . . . . . . . . . . . . . . . . .
4.2.5 Robustness to resonances . . . . . . . . . . . . . . . .
4.2.6 Sensitivity to signal noise . . . . . . . . . . . . . . . .
4.3 Parameter fitting with Recursive Least-squares (RLS) algorithm
4.3.1 Model structure . . . . . . . . . . . . . . . . . . . . .
4.3.2 Control signal . . . . . . . . . . . . . . . . . . . . . . .
4.3.3 Identification results . . . . . . . . . . . . . . . . . . .
45
5 Control Design
5.1 The PID-controller . . . . . . .
5.2 Ziegler-Nichols Tuning based on
5.3 AMIGO Tuning . . . . . . . . .
5.4 Gyro Loop properties . . . . .
5.5 Anti-Windup . . . . . . . . . .
66
66
67
67
69
71
. . . . . . . . .
relay feedback
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
45
49
49
50
52
52
55
56
59
61
62
63
6 Simulation Results
72
6.1 Reference following . . . . . . . . . . . . . . . . . . . . . . . . 72
6.2 Disturbance suppression . . . . . . . . . . . . . . . . . . . . . 72
7 Conclusions
77
7.1 Proposals for system modifications . . . . . . . . . . . . . . . 77
7.2 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
A Extract from motor data sheets
80
B Optimal weighting of AWGN signals
81
C Transfer of torque over a non-stiff axle
84
List of Figures
1.1
1.2
1.3
1.4
Electro-optical director EOS-500. . . . . . .
Optronic tracking system main components.
Pedestal motion angles. . . . . . . . . . . .
Servo system architecture. . . . . . . . . . .
.
.
.
.
9
10
10
11
2.1
2.2
2.3
Control algorithm cycle. . . . . . . . . . . . . . . . . . . . . .
Model of digital controller with AD/DA converters. . . . . . .
Torque (τ ) generated by the stator field (Bstator ) and the
rotor field (Bstator ) seperated by an angle of (δ). . . . . . . .
Approximation of motor electronics. . . . . . . . . . . . . . .
Direction of the magnetic field from the phases in the stator
(ēR , ēS , ēT ) and the total magnetic field (ēB ). . . . . . . . . .
Commutation routine functionality. . . . . . . . . . . . . . . .
Voltages in the PWM circuit. . . . . . . . . . . . . . . . . . .
Linear approximation of the PWM circuit. . . . . . . . . . . .
Feedback loop TR-Driv. . . . . . . . . . . . . . . . . . . . . .
One-phase approximation of the commutation routine, TRDriv and motor. . . . . . . . . . . . . . . . . . . . . . . . . .
Model of rotating mass with applied torque. . . . . . . . . . .
Model of simplified system. . . . . . . . . . . . . . . . . . . .
Ship movements. . . . . . . . . . . . . . . . . . . . . . . . . .
System model with disturbances from ship movements (R),
wind (W ), friction torque (F ) and signal noise (NG , NR ). . .
Gyro signal channel model. . . . . . . . . . . . . . . . . . . .
Noise in azimuth gyro signals. . . . . . . . . . . . . . . . . .
Correlation of the azimuth gyro noise. . . . . . . . . . . . . .
Periodogram of the azimuth gyro noise. . . . . . . . . . . . .
Noise in elevation gyro signals. . . . . . . . . . . . . . . . . .
Auto-correlation estimate of resolver signal noise. . . . . . . .
13
14
2.4
2.5
2.6
2.7
2.8
2.9
2.10
2.11
2.12
2.13
2.14
2.15
2.16
2.17
2.18
2.19
2.20
3.1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Gyro signal from low frequency triangular wave input experiment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
15
16
17
18
18
19
19
20
21
22
24
25
27
28
29
30
32
33
35
LIST OF FIGURES
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
4.10
4.11
4.12
4.13
Gyro signal from experiment and simulation with the control
signal in Figure 3.1 and 21 Nm Coulomb friction torque. . . .
Approximated angular acceleration at different control signal
levels with a rectangular wave input in simulation (upper)
and real experiment (lower). . . . . . . . . . . . . . . . . . . .
Block diagram of a process with relay feedback. . . . . . . . .
Friction torque model used in simulation compared to standard Coulomb friction torque. . . . . . . . . . . . . . . . . . .
Resulting gain and oscillation frequency of azimuth gyro from
relay feedback. . . . . . . . . . . . . . . . . . . . . . . . . . .
Resulting gain and oscillation frequency of elevation gyro
from relay feedback. . . . . . . . . . . . . . . . . . . . . . . .
Azimuth gyro step response for different step amplitudes. . .
Azimuth gyro step response for 7.5V and 10V steps compared
to respective integrator approximation. . . . . . . . . . . . . .
Block diagram of system during measurements of the frequency response with the frequency response analyzer. . . . .
Frequency response of the open loop with controller given
by eq. 4.9 estimated by the frequency response analyzer with
different disturbance levels compared to the linear model. . .
Frequency response of the system estimated by the frequency
response analyzer with different disturbance levels compared
to the linear model. . . . . . . . . . . . . . . . . . . . . . . . .
Frequency response estimate generated by frequency response
analyzer measurements on the simulation model. . . . . . . .
Control signal (u) in oscillating system with output (y) under
relay feedback with a sampled relay. . . . . . . . . . . . . . .
Gyro signal at start of a relay feedback test. . . . . . . . . . .
Estimation convergence of oscillation amplitude and frequency
in azimuth gyro relay feedback. . . . . . . . . . . . . . . . . .
Oscillation amplitude and frequency for simulation of azimuth
gyro relay feedback with different relay amplitudes. . . . . . .
Oscillation amplitude and frequency for simulation of elevation gyro relay feedback with different relay amplitudes. . . .
Control signal amplitude required to saturate the PWM with
a current feedback gain of 1.6. . . . . . . . . . . . . . . . . . .
Oscillation estimation results from simulation of azimuth gyro
relay feedback with a resonance frequency of fr Hz. . . . . . .
Oscillation estimation results from simulation of elevation
gyro relay feedback with a resonance frequency of fr Hz. . . .
Oscillation estimation results from simulation of azimuth gyro
relay feedback with different levels of white signal noise. . . .
5
36
38
38
40
41
42
43
44
45
47
48
49
50
52
53
54
54
55
56
57
57
LIST OF FIGURES
4.14 Oscillation estimation results from simulation of elevation
gyro relay feedback with different levels of white signal noise.
4.15 Oscillation estimation results from simulation of azimuth gyro
relay feedback with different levels of 50Hz signal noise. . . .
4.16 Oscillation estimation results from simulation of elevation
gyro relay feedback with different levels of 50Hz signal noise.
4.17 Model parameter convergence from simulations in azimuth
with RLS for model (4.33). . . . . . . . . . . . . . . . . . . .
4.18 Model parameter convergence from simulations in elevation
with RLS for model (4.33) . . . . . . . . . . . . . . . . . . . .
4.19 Model parameter convergence from simulations in elevation
with RLS for model (4.33) and a control signal limit of 1.5V.
4.20 Model parameter convergence from triangular wave experiment data in azimuth with RLS for Model 2 (4.33). . . . . . .
5.1
5.2
6.1
6.2
6.3
6.4
6.5
6.6
6.7
6.8
Bode diagram of nominal open azimuth gyro loop with a time
delay of 3/512s and PI controller parameters from Table 5.4.
Bode diagram of nominal closed azimuth gyro loop with PI
controller parameters from Table 5.4. . . . . . . . . . . . . . .
Step response (1 rad/s) of closed azimuth gyro loop for different controllers. . . . . . . . . . . . . . . . . . . . . . . . . .
Step response (1 rad/s) of closed elevation gyro loop for different controllers. . . . . . . . . . . . . . . . . . . . . . . . . .
Step response (0.1 rad/s) of closed azimuth gyro loop for different controllers. . . . . . . . . . . . . . . . . . . . . . . . . .
Step response (0.1 rad/s) of closed elevation gyro loop for
different controllers. . . . . . . . . . . . . . . . . . . . . . . .
Azimuth gyro loop responce to a 20 Nm torque step disturbance.
Elevation gyro loop responce to a 5 Nm torque step disturbance.
Azimuth gyro loop suppression of a sinusoidal angle disturbance with amplitude 0.5 rad and frequency 1 rad/s. . . . . .
Elevation gyro loop suppression of a sinusoidal angle disturbance with amplitude 0.5 rad and frequency 1 rad/s. . . . . .
C.1 Model of a non-stiff axel. . . . . . . . . . . . . . . . . . . . .
C.2 Bond graph of the non-stiff axle. . . . . . . . . . . . . . . . .
6
58
58
59
63
64
64
65
70
70
73
73
74
74
75
75
75
76
84
85
Chapter 1
Introduction
A director is a combination of sensors used for observation or target trajectory tracking. The sensors can for example be radars, cameras or lasers.
Often a combination of sensors is used to get more information of the target
position.
Common for the sensors used is that they have a narrow field of view and
thus have to be directed toward the target. To be able to direct the sensors
they are mounted on a pedestal. The pedestal has two motors allowing it
to be directed in the demanded direction. With a narrow field of view and
distant targets a small deviation in angle can result in lost targets. This
puts high demands on precision requiring a servo system based on feedback.
The directors can have different configurations of sensors and hence different dynamic properties. The directors may also differ in components like
motors and bearings. Thus every configuration must be tuned individually
to achieve acceptable performance and to guarantee stability.
Today the tuning is done manually by measuring the frequency responses. From the results a suitable controller is designed. This method
is time consuming and requires experience. A desirable feature would be if
the tuning could be performed automatically in the controller software.
1.1
Auto-tuning
Automatic tuning or auto-tuning is basically a built in function for tuning
the controller parameters. The tuning can be initiated by the operator but
it performes all tests and designs automatically. Thus a minimal experience
in servo controller design is required to perform the tuning.
The advantages are fast tuning with minimal experience. The drawback
may be that the identification and control design leaves no room for the
flexibility of manual tuning.
Auto-tuning is normally performed in three steps. The procedure is
similar to how manual black or gray box identification and tuning is done
7
CHAPTER 1. INTRODUCTION
8
manually.
1. A disturbance is generated. The most common disturbance is a transient, e.g., a step or pulse, on the input.
2. The response of the system is evaluated. A system model can then be
fitted to the data. Other information, needed for the control design,
can also be extracted.
3. Controller parameters are computed based on the information from
the evaluation.
The experiments can be performed in open- or closed loop, depending
on the nature of the system and operative conditions.
1.2
Problem formulation
The goal of this thesis is to investigate the possibility of applying autotuning on the electro-optical director EOS-500 developed by Saab Systems.
The tuning algorithm should be applicable on the current hardware configuration. This poses the following constraints on the algorithm:
• Measurable states are restricted to the gyro and resolver signals described in section 1.3.2.
• The algorithm must be executed at exactly 512 Hz.
• The algorithm must be recursive due to the systems inability to store
large batches of data.
The aim is to answer the questions:
• Are the advantages sufficient to motivate automatic tuning over the
manual tuning used today?
• Can the auto-tuning algorithm be made robust to variations in the
system?
• What modifications could be made to make auto-tuning and control
in general perform better?
Testing and evaluation is carried out in simulations. The system is modR
eled and a simulation model is constructed in SIMULINK
. The controller
R
is represented with an embedded MATLAB block executing at 512 Hz
with an additional time delay.
Two different approaches of system identification are tested.
CHAPTER 1. INTRODUCTION
9
The first approach is based on relay feedback [2]. It is a feedback based
method for detecting the amplitude margin and frequency where the phaseshift is −180 degrees. The pre-tuning is minimal but the results are limited
in terms of received system knowledge.
The second approach is based on model parameter fitting with the Recursive least-squares estimation (RLS) algorithm [3]. This is merely a recursive
variation of linear regression often used in adaptive control. The method
can potentially give more system information compared to relay feedback
but requires a suitable model structure.
The performance of some different linear control design methods will be
compared in simulations. The evaluation will comprise reference following,
disturbance suppression and robustness. The advantage of anti-windup will
also be invesigated.
1.3
System Overview
The director is mounted on the deck of a naval ship and is a part of a
combat system consisting of radars, weapons, command stations etc. EOS500, seen in Figure 1.1, is designed to be compact and light weight. The
main structure of the pedestal is similar to the larger radar directors and
has inherited much of their servo system architecture.
Figure 1.1: Electro-optical director EOS-500.
1.3.1
Director structure
The sensors used for target tracking are mounted on a pedestal. The pedestal
can turn both in azimuth and elevation. The two axes of the pedestal are
mounted with ball bearings and directly connected to electrical motors.
By turning the pedestal the optronic sensors can be directed freely in
azimuth but the elevation has mechanical limitations of +85◦ to −35◦ .
CHAPTER 1. INTRODUCTION
10
Rate gyro
Elevation motor
Optronic sensors
Elevation resolver
Azimuth motor
Azimuth resolver
Figure 1.2: Optronic tracking system main components.
There are two resolvers, one for each axis, measuring the angular positions. There is also a gyro measuring the angular velocity, mounted together
with the optronic sensors.
1.3.2
Servo sensors
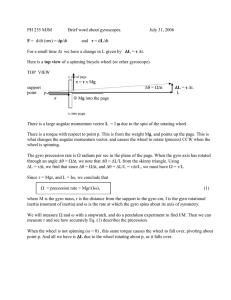
The direction of the system is managed in a spherical coordinate system.
That way each axis of the director only moves in one of the coordinates, like
illustrated in Figure 1.3.
el
az
Figure 1.3: Pedestal motion angles.
By using these coordinates in feedback the motion in azimuth and elevation can be seen as two separate SISO (Single input, Single output) systems.
There is still some coupling between the two axes due to, e.g., the gyroscopic
effects of rotating bodies. These effects can however be neglected due to the
slow velocities used in operation.
The resolvers measure the angles relative to the ship deck where the
CHAPTER 1. INTRODUCTION
11
director is mounted. When the director is mounted on a steady platform
the angle measured by the resolver is the integral of the velocity measured
by the gyro. When in operation this is normally not the case because the
ship movements are picked up by the gyro but not by the resolvers.
1.3.3
Servo system architecture
The purpose of the servo system is to control the director position or velocity
with the use of feedback from the gyro and resolvers. Desired values for
the angles or angular velocities are sent to the controller from the Combat
Management System (CMS). The local controller will then use feedback from
the gyro and resolvers to follow the demanded values. The controller is run
on a standard PC with Windows XP. From the controller, current references
are sent through a D/A-converter to an analog motor control card named
TR-Driv. The control card supplies the motor with voltage to achieve the
demanded current.
Controller PC
State reference from
Combat Management System
Director
TR-Driv
Current
refernce
Voltage
Angles (Resolver)
Angular rates (Rate gyro)
Figure 1.4: Servo system architecture.
1.4
Thesis outline
The thesis is divided into the chapters described below.
In Chapter 2 the system is broken down into its components for mathematical modeling. The result will be used to construct the simulation model
and the design of the identification algorithm.
In Chapter 3 simulation results are compared to measurements from the
real system for validation.
Chapter 4 describes the identification methods used and why some methods are not suitable for the system.
CHAPTER 1. INTRODUCTION
12
Chapter 5 reviews the different control design methods used based on the
identification results.
In Chapter 6 the performance of the controllers are evaluated by simulation results.
In Chapter 7 the conclusions from the results are presented together with
proposals for future work.
Chapter 2
Modeling
To produce the simulation model the system will be broken down into its
components for mathematical modeling. Some simplifications will be made.
Some of them are due to lack of process knowledge and some are made
when it can be argued that the effects on the model behavior are minimal
compared to the simplicity gained.
2.1
Controller
The algorithm in the controller PC is executed at a rate of 512 Hz. Every
cycle is executed in the four steps illustrated in Figure 2.1.
3. Apply the
comuted control
2. Compute the
new control signal
512 Hz
1. Read one sample
from the
gyro & resolvers
4. Wait
Figure 2.1: Control algorithm cycle.
13
CHAPTER 2. MODELING
14
1. The values from the gyro and resolvers are sampled and quantized.
2. The values from step one and old sample values are used to compute
a new control signal.
3. When the new control signal is computed it is applied through a D/Aconverter to the motor control card. The output is constant until the
next value is computed in the following cycle.
4. In the remaining time of the cycle no computations are made. The
system waits for the next sample.
The digital controller can be modeled as in Figure 2.2. The sampling and
quantizers represents the A/D-converters and the (Pulse Amplitude Modulator) PAM the D/A-converter. The delay is due to the time of computation.
The time delay can not exceed one sampling period since that would imply
that the computations take more than one sampling period, which is not
possible. The delay can be assumed to be constant if the same algorithm is
executed in every sample.
Digital servo controller
Gyro
Sampling
Quantizer
Resolver
Sampling
Digital
filtering
Control effort
e-sT
PAM
Quantizer
Reference from CMS (Digital)
Figure 2.2: Model of digital controller with AD/DA converters.
The reference from the CMS typically has a lower sampling rate (∽ 50
Hz) than the local controller.
2.2
Motors
The motors used to control the pedestal are three-phase brushless DC (BLDC)
motors. A three-phase BLDC motor consists of a stator and a rotor. The
stator is the static part that is fixed to the mounting and the rotor is the
rotating part.
The stator consists of a number of windings. When current runs through
the windings an electromagnetic field is induced. Each of the three electrical
phases has a set of windings distributed around the stator in such a way that
CHAPTER 2. MODELING
15
the magnetic fields generated by each phase are separated by 2π/3 radians.
By applying different currents in the different windings the strength and
direction of the resulting magnetic field can be controlled, due to its super
positioning property.
The rotor consists of permanent magnets. Thus no current runs from the
stator to the rotor. When a magnetic field is induced in the stator, torque,
trying to align the magnetic fields in the stator and rotor, will arise. The
torque (τ ) depends on the strength of the stator and rotor fields and the
difference in angle (δ) as described in (2.1) and illustrated in Figure 2.3.
τ ∝ |Bstator | · |Brotor | · sin (δ)
(2.1)
Since the rotor has permanent magnets, the magnetic field has constant
magnitude and the direction depends only on the alignment of the motor.
The controllable parameters are therefore reduced to Bstator and δ. Thus
(2.1) can be reduced to (2.2).
τ ∝ |Bstator | · sin (δ)
(2.2)
Brotor
Bstator
!
Figure 2.3: Torque (τ ) generated by the stator field (Bstator ) and the rotor
field (Bstator ) seperated by an angle of (δ).
To generate the current, voltage is applied to the three phases (R, S and
T ). The electronics can be approximated with the symmetrical circuit in
Figure 2.4.
The resistors represent the resistance in the wires and the inductor comes
from the magnetic fields generated in the windings. The circuit has no
ground or zero. Thus the sum of the currents must be zero according to
Kirchoff’s first law.
iR + iS + iT = 0
(2.3)
CHAPTER 2. MODELING
16
UR
iR
L
R
R
iT
L
R
L
UT
iS
US
Figure 2.4: Approximation of motor electronics.
When the motor is turning, voltage is induced in the stator windings.
This voltage is called Back EMF (Electromotive force) and works against the
motor velocity, acting as a brake. The EMF is proportional to the angular
velocity.
2.3
Commutation routine
The magnetic field generated in each phase in the stator is proportional to
the current running through the winding. The voltages applied to the three
phases are used to control the strength and direction off the total stator field.
Because the phases are evenly distributed the direction of the field from each
phase will be separated by 2π/3 radians as illustrated in Figure 2.5.
The total field will be the sum of the three fields.
Btot ēB = BR ēR + BS ēS + BT ēT
(2.4)
With a perfectly symmetric motor the relation between the current and
the magnetic field strength will be the same for all phases. This implies that
to fulfill (2.3), the sum of the field strengths must be zero.
BR + BS + BT = 0
(2.5)
The preferred way to choose the fields would be:
BR = B · sin (ϑ)
BS = B · sin (ϑ + 23 π)
BT = B · sin (ϑ + 43 π) = −BR − BS
(2.6)
CHAPTER 2. MODELING
17
eB
eS
!
eR
2
3
2
3
eT
Figure 2.5: Direction of the magnetic field from the phases in the stator
(ēR , ēS , ēT ) and the total magnetic field (ēB ).
If the contribution to the magnetic field from each phase could be chosen
like in (2.6) the resulting field would be:
|B̄stator | = 32 B
(2.7)
φ = π2 − ϑ
There are now two parameters (B and ϑ) used to adjust the fields in
the stator phases. The only reason for applying current in the motor is to
generate torque. Thus it is desirable to keep the torque to current ratio as
high as possible. According to (2.2) that is achieved when:
π
(2.8)
2
If the rotor field angle (ϕ) is known, the value of ϑ that gives the highest
torque to current ration can be derived by (2.9).
sin (δ) = 1 → δ =
ϑ = −ϕ
(2.9)
Now the only parameter is B, which will be proportional to the torque.
Because the magnetic field is proportional to the current, torque can be
controlled by applying the phase currents as in (2.10).
iR = I · sin (−ϕ)
iS = I · sin ( 23 π − ϕ)
⇒τ ∝I
(2.10)
iT = −iR − iS
The currents are not directly adjustable. They are controlled by the
motor control card TR-Driv described in section 2.4. TR-Driv takes scaled
current references for two of the phases as inputs (iRref , iSref ).
CHAPTER 2. MODELING
18
The output from the controller algorithm (u) is a scaled torque reference
for each motor. By using the measurement of the motor angel from the
resolver (ϕ), iRref and iSref can be computed according to (2.10). This is
done by the commutation routine that is integrated in the controller software
illustrated in Figure 2.6.
Controller algorithm
u
iRref
Commutation
iS ref
Figure 2.6: Commutation routine functionality.
2.4
Motor control electronics
The motor control uses PWM (Pulse Width Modulation). This is a very
commonly used technique in power electronics. The principle is to only use
two levels of voltage instead of various levels and switch between the levels
very fast.
A triangular wave with a frequency of 19.2 kHz and magnitude of 10V is
generated in the hardware. The triangular wave is compared to a reference
voltage (uref ). If the reference voltage gets below the voltage of the triangular wave, the voltage of the power supply (Umax ) is applied. Otherwise the
used voltage is the same as the ground of the power supply. The voltages
in the PWM circuit are illustrated in Figure 2.7.
Output
U max V
0V
t
+10V
uref
t
-10V
Figure 2.7: Voltages in the PWM circuit.
The electrical circuit in the motor has low-pass characteristics. The
switching frequency of the PWM can be considered to be so high that only
the average of the output voltage has any effect on the current. By neglecting
CHAPTER 2. MODELING
19
the high frequency content of the PWM output, the relation between uref
and U can be approximated by (2.11).
Umax
Umax
, |uref | ≤ 10
20 · uref + 2
(2.11)
Umean =
0
, uref < −10
Umax
, uref > 10
The motor has no connection to ground. Because the voltages between
the phases are relative to each other an equal potential offset to all the phases
has no effect. Thus the offset in (2.11) can be removed without affecting
the behavior of the model. The relation between uref and U can now be
approximated by a gain and saturation as in (2.12) and Figure 2.8.
Umax
, |uref | ≤ 10
20 · uref
U=
(2.12)
Umax
2 · sgn(uref ) , |uref | > 10
u ref
PWM
u ref
U
U
10
U max
20
Figure 2.8: Linear approximation of the PWM circuit.
The outputs from the controller software are desired values of the currents. To be able to control the current and thereby the torque in the motor
the hardware has built in current feedback. This will increase the bandwidth
compared to direct voltage control.
The input is a scaled current reference (iref ) and the actual current is
measured, forming a closed loops like in Figure 2.9.
i
Kj
iref
!5
uref
U
Ka
! 10
U max
20
Figure 2.9: Feedback loop TR-Driv.
Approximate values of Ka and Kj are:
Ka ≈ 60
Kj ≈ 1.6
(2.13)
CHAPTER 2. MODELING
20
Each of the three phases has a PWM circuit. For phase one and two
the reference comes from the commutation routine. The commutated phase
references are converted with a DA-converter and used as input to TR-Driv.
The third reference is generated in the control card so that the sum of the
currents are zero.
2.5
One-phase motor equivalent
If the commutation routine works perfectly as described in section 2.3, the
simplified model of TR-Driv in section 2.4 is considered accurate and the
motor is symmetrical, a one-phase approximation like in Figure 2.10 can
be made. The simplifications may not capture all dynamics. It is however
sufficient considering the limited knowledge and detail in modeling of TRDriv. With a more detailed modeling of TR-Driv a three-phase model may
be needed to capture eventual non expected behavior.
UR
i Rref
u
Commutation
Routine
"Kj
US
TR-Driv
iSref
#5
u
U
Ka
Motor
UT
# 10
1
R ! sL
U max
20
i
Kt
"E
Figure 2.10: One-phase approximation of the commutation routine, TR-Driv
and motor.
CHAPTER 2. MODELING
21
!
r
V J
r
Figure 2.11: Model of rotating mass with applied torque.
2.6
Mechanics
When torque is generated by the motor the axis starts to accelerate. The
energy consumed in the motor is transformed into kinetic energy in the mass
of the moving parts. The amount of kinetic energy depends on the angular
velocity and moment of inertia (J). The relationship between torque (τ )
and angular acceleration (ϕ̈) is given by (2.14).
1
τ
(2.14)
J
If the center of mass of the elevating part is not in the center of rotation
it will act as a disturbance. Torque will be generated by gravity and control
has to be applied to keep it steady. Counterweights are therefore used to
move the center of gravity to the axis of rotation. The balancing will be
assumed to be perfect and the disturbance due to unbalanced mass is zero.
The counterweights will however increase the total mass and thereby the
moment of inertia.
The moment of inertia of a point mass (m) with the distance r to the
center of rotation is computed as in (2.15).
ϕ̈ =
Jm = mr 2
(2.15)
The moment of inertia for an entire rotating body can thus be computed
like in (2.16), where r̄ is the point in space, r is the perpendicular distance
to the rotation axis and ρ(r̄) is the density at r̄.
CHAPTER 2. MODELING
22
J=
ZZZ
r 2 ρ(r̄)dV
(2.16)
V
To compute the exact value of J for the director would require very
detailed information about every component. It is not necessary for the
purpose at hand. The values used in the simulation model will instead be
approximations based on the total weight and size. The following values are
used in the model:
Jaz ≈ 3 kg m2
Jel ≈ 2 kg m2
(2.17)
Another assumption is that the pedestal is stiff. This is however not
valid for the larger radar directors. Because they are much heavier, the
torque will make the axis between the motor and moving mass distort if
the acceleration is sufficient. This can cause problems at higher frequencies
where the system can get oscillatory under feedback. No such behavior has
been detected on EOS-500 at relevant frequencies.
2.7
Decoupled SISO model
By combining the component models, the pedestal motion in azimuth and
elevation can be modeled as decoupled SISO-systems as in Figure 2.12.
#Kj
Electronics
Mechanics
$5
u
i
1
R
$ 10
Ka
$ 10
Gyro
Motor control
U max
20
!
"
!
Kt
!
Resolver
sL
1
J
# Kb
Back EMF
Figure 2.12: Model of simplified system.
If none of the signals are saturated the model is linear and can be expressed as a transfer function from the control signal to the angular velocity
by (2.18).
Go (s) =
Kb + s
Ka Umax
20
Ka Kj JUmax
JR
+ s2 JL
+
Kt
20Kt
Kt
(2.18)
CHAPTER 2. MODELING
23
With the parameters from the data sheets in appendix A, the approximation made in (2.17) and the used power supply voltage of 80V , the functions
in (2.19) and (2.20) can be derived.
Gaz (s) ≈
0.0064s2
240
+ 175s + 7.6
(2.19)
240
(2.20)
0.01s2 + 59s + 13
Both systems are second order and very stiff. The poles of respective
systems are placed as follows.
Gel (s) ≈
Poles of azimuth transfer function:
p1 ≈ −0.043
p2 ≈ −2.7 · 104
(2.21)
Poles of elevation transfer function:
p1 ≈ −0.22
p2 ≈ −6.0 · 103
(2.22)
The systems can therefore be approximated by (2.23) and (2.24) while
in the linear region.
2.8
Gaz (s) ≈
1.37
s + 0.043
(2.23)
Gel (s) ≈
4.06
s + 0.22
(2.24)
Resonances due to non-stiff mechanics
There may be many sources of model errors due to the lack of system knowledge and simplifications made. The larger radar directors have a resonance
at 30 − 60 Hz. This comes from lack of stiffness in the pedestal and mountings. One way of modeling the non-stiff pedestal is derived in Appendix C.
The additional dynamics caused by the pedestal not being completely
stiff may potentially include complex conjugated poles. These poles will
yield mechanical resonances and possibly an oscillating closed loop system
if performance is pushed without applying specially designed compensation
filters. Because EOS-500 is both lighter and more compact than the radar
directors the problem with resonances will not be as severe, but they still
needs to be considered.
The influence of these resonances on identification and control will be
investigated both for robustness reasons and as a step in transferring the
auto-tuning to the radar directors.
CHAPTER 2. MODELING
2.9
24
Disturbances
A large part of the control effort will be used to compensate for disturbances
acting on the system. Some of them will be modelled to enable investigations
of different controllers suppression properties through simulations.
2.9.1
Ship movements
When the ship is out at sea it will not be steady. The different ship motions
are illustrated in Figure 2.13.
Heave
Pitch
Roll
Yaw
Figure 2.13: Ship movements.
Because the director is mounted on the ship deck it will follow the ship’s
movements. The resolvers will however not pick up these movements due to
the fact that the sensors are mounted on the ship and measures the angles
in the ship coordinate system. The motion will though be picked up by the
rate gyro. If the information gained from the servo sensors on the director is
not complemented with information about the ship position, only the gyro
signal can be used in feedback to compensate.
The movements, denoted R in Figure 2.14, have low frequency. A normal
test signal is the low frequency sinusoidal in (2.25).
π t rad
(2.25)
R = 0.5 sin
3
2.9.2
Wind
When winds hits the director, torque will be generated, just like the force
from the sails on a sailing boat. Wind is a bigger problem with the larger
radar directors. The radar dish has a size and shape that can capture a
lot of wind compared to the smoother shaped of EOS-500. The disturbance
from wind must however be considered. The wind is modeled as a torque
disturbance, denoted W in Figure 2.14. Wind can have very different characteristics e.g., constant, steps or pulse, see [12].
25
d
dt
"
$R
NR
Resolver
CHAPTER 2. MODELING
!
$ f (&)
$ Kb
u
% 10
Ka
$Kj
% 10
%5
U max
20
R
1
sL
i
Kt
#
F
W
1
J
"
NG
"
Gyro
Figure 2.14: System model with disturbances from ship movements (R),
wind (W ), friction torque (F ) and signal noise (NG , NR ).
CHAPTER 2. MODELING
2.9.3
26
Friction torque
The director must be able to withstand heavy mechanical strain. The ball
bearings must therefore be tight to prevent vibrations from causing too much
wear. The tight bearings unfortunately have a lot of friction torque. This
can be a serious problem when using the electrical motors. With the high
friction torque and limited torque, lot of the control effort will be spent on
overcoming the friction torque. The friction torque can, like the wind, be
seen as a torque disturbance.
One distinction between friction torque and the other disturbances discussed is the strong dependence of the internal states of the system. There
are many different friction torque models. A good summary of the most
common models can be found in [5].
The starting point of the friction torque model used in simulations will
be Coulomb friction torque, see (2.26). The friction torque model will be
based on experiment data. Some modifications will therefore be made to
the Coulomb friction torque model in chapter 3 to better fit the real system
behaviour.
, ϕ̇ < 0
fc
0
, ϕ̇ = 0
F =
(2.26)
−fc
, ϕ̇ > 0
Due to how the bearings are constructed the friction torque is not even
around the orbit. In some positions it is higher than other. The friction
torque is also dependent on temperature. When the temperature changes
the material in the bearing components will expand or contract. This will
have effects on friction torque because the bearing gets tighter or looser.
Temperature can also change the properties of the lubrication, thus affecting
the friction torque.
2.10
Measurement Noise
The measured signals from the resolvers and gyro are quantized and noisy.
This may have effects both on identification and control performance. Thus
it will be modeled based on measurements to enable simulation of these
influences.
2.10.1
Gyro signal noise
There are two gyro signals available for each axis of the pedestal. The two
signals comes from the same gyro but are scaled differently before the DA
converter. This is done to get better resolution at low speeds. The two
signals can also be combined to reduce noise. An approximation of the two
gyro signal channels is depicted in Figure 2.15
CHAPTER 2. MODELING
27
N1
~
1
4
4
! 2.6
Gyro
1
a
1
a"b
~
2
ˆ
b
! 2.6
N2
Software
Figure 2.15: Gyro signal channel model.
The saturations come from the DA converters. The fact that the DA
converters also quantize the signals will here be neglected. This is because
the noise levels are much higher than the quantizer steps. The gyro signals
may also contain an offset due to gyro drift. There are algorithms to compensate for this drift. These algorithms will here be considered perfect. To
model the noise, measurement data will be used. The measurements are
made indoors with the director mounted on a steady platform.
By keeping the control signal at zero the system is at rest and the measured signal is noise only. The offset in the signal is compensated by subtracting the mean value from each sample.
Azimuth gyro noise
The 2000 sample azimuth noise signals in Figure 2.16 will be used to model
the noise. The straight forward approach would be to approximate the
variance by the mean square as in (2.27) and (2.28), then combine the two
signals as described in Appendix B. The combined noise N3 , is then given
by (2.29).
2000
1 X 2
N1 (l) ≈ 2.13 · 10−6
2000
(2.27)
2000
1 X 2
N2 (l) ≈ 1.82 · 10−6
=
2000
(2.28)
s21 =
l=1
s22
l=1
By combining the two signals the estimated variance (eq. 2.30) is reduced, but not as much as expected (eq. 2.31). This indicates some correlation between N1 and N2 .
N3 =
s22 N1 + s21 N2
s21 + s22
(2.29)
CHAPTER 2. MODELING
28
N1
−3
x 10
rad/s
5
0
−5
0
200
400
600
800
1000 1200
sample
1400
1600
1800
2000
1400
1600
1800
2000
N
−3
2
x 10
rad/s
5
0
−5
0
200
400
600
800
1000 1200
sample
Figure 2.16: Noise in azimuth gyro signals.
2000
1 X 2
N3 (l) ≈ 1.17 · 10−6
2000
(2.30)
l=1
s21 s22
≈ 0.98 · 10−6
+ s22 )
(s21
(2.31)
The autocorrelation of each signal and the cross-correlation between
them are depicted in Figure 2.17. The autocorrelation indicates that both
N1 and N2 consist of an uncorrelated part and a part with high correlation,
like a single frequency sinusoidal. The cross-correlation indicates that the
white part of N1 and N2 are uncorrelated with each other while the correlated parts seems almost identical. This indicates that the correlated part
originate from the same source.
The spectra of the noise signals in Figure 2.18 reveals two sinusoidal
waves at approximately 1.5 Hz and 49 Hz. The noise signal can be approximated by (2.32). The 49 Hz disturbance most likely comes from the power
grid. This part of the disturbances may vary with different sources of powers
and how the wiring is done.
CHAPTER 2. MODELING
29
−7
−7
−7
x 10
x 10
15
15
15
10
10
10
N N
2
1
N
1
(k)
20
2
20
r (k)
20
N
5
5
0
0
0
−5
−5
−5
−2000 −1000
0
1000
lag (k)
2000
−2000 −1000
r
r (k)
x 10
0
1000
lag (k)
2000
5
−2000 −1000
0
1000
lag (k)
2000
Figure 2.17: Correlation of the azimuth gyro noise.
N1 ≈ A11 sin (3πt) + A12 sin (98πt) + W1
W1 ∼ N (0, σ12 )
N2 ≈ A21 sin (3πt + φ1 ) + A22 sin (98πt + φ2 ) + W2
W2 ∼ N (0, σ22 )
N3 ≈ A31 sin (3πt + Ψ1 ) + A32 sin (98πt + Ψ2 ) + W3 W3 ∼ N (0, σ32 )
(2.32)
The relation between the periodogram
amplitude
(P
)
and
the
sinusoidal
√
amplitude (A) is given by: A = 2 P . The values of Anm received from the
periodograms in Figure 2.18 can be found in Table 2.1.
Parameter
A11
A12
A21
A22
A31
A32
Approximated value (rad/s)
5.38 · 10−4
7.32 · 10−4
4.20 · 10−4
6.57 · 10−4
4.74 · 10−4
6.90 · 10−4
Table 2.1: Approximated amplitudes of sinusoidals in the azimuth gyro
signal noise
If N1 and N2 are combined like in (2.29) the theoretical sinusoidal amplitudes in N3 are given by (2.33).
A3m
1
= 2
s2 + s21
q
s42 A21m + s41 A22m + 2s22 s21 A1m A2m cos (φm )
(2.33)
An estimate of the phase-shift between the channels is given by (2.34).
2
4 2
4 2
2 2 2
−1 (s2 + s1 ) A3m − s2 A1m − s1 A2m
φm = cos
(2.34)
2s22 s21 A1m A2m
CHAPTER 2. MODELING
30
−7
x 10
1
1
N
P (e
j2π f
)
1.5
0.5
0
0
50
100
150
frequency (Hz)
200
250
300
50
100
150
frequency (Hz)
200
250
300
50
100
150
frequency (Hz)
200
250
300
−7
x 10
2
1
N
P (e
j2π f
)
1.5
0.5
0
0
−7
x 10
3
1
N
P (e
j2π f
)
1.5
0.5
0
0
Figure 2.18: Periodogram of the azimuth gyro noise.
CHAPTER 2. MODELING
31
Using the values in Table 2.1, (2.27) and (2.28), gives the phase-shift
estimations as shown in (2.35).
φ̂1 ≈ 0.076 rad
φ̂2 ≈ 0.13 rad
(2.35)
Such small phase differences can be neglected and the weighted averaging
between the sinusoidal parts can be approximated by weighted averaging of
the amplitudes. Thus the optimal weighting of the sinusoidal signals is to
only use the one with least amplitude.
Approximations of the white noise variance in the noise signal are given
in (2.36).
σ̃12 = s21 − 21 A211 − 21 A212 ≈ 1.71 · 10−6
σ̃22 = s22 − 12 A221 − 21 A222 ≈ 1.51 · 10−6
σ̃32 = s23 − 12 A231 − 21 A232 ≈ 8.24 · 10−7
(2.36)
The reduction of white noise is very close to what could be expected, see
(2.37).
s42 σ̃12 + s41 σ̃22
= 8.03 · 10−7 ≈ σ̃32
(s21 + s22 )2
(2.37)
The complete model of the azimuth gyro noise can be found in (2.38).
NGaz (n) ≈ 5 · 10−4 sin
2 (n)] ≈ 8 · 10−7
E[Waz
3π
fs n
E[Waz (n)Waz (n + k)] = 0,
+ 7 · 10−4 sin
98π
fs n
+ Waz (n)
(2.38)
k 6= 0
Elevation gyro noise
The elevation gyro noise in Figure 2.19 can be modeled in a similar way as
for the azimuth signal. The same sequence of measured data yields the noise
model in (2.39).
NGel (n) ≈ 0.0013 sin 98π
n
+ Wel (n)
fs
(2.39)
E[Wel2 (n)] ≈ 8 · 10−7
E[Wel (n)Wel (n + k)] = 0,
k 6= 0
The white parts of the azimuth and elevation noise have similar power.
The source of the low frequency disturbance detected in azimuth is unknown.
The lack of that part in elevation may depend on that the measurements
CHAPTER 2. MODELING
32
N1
−3
x 10
rad/s
5
0
−5
0
200
400
600
800
1000 1200
sample
N2
1400
1600
1800
2000
400
600
800
1000 1200
sample
1400
1600
1800
2000
−3
x 10
rad/s
5
0
−5
0
200
Figure 2.19: Noise in elevation gyro signals.
were not performed simultaneously and the disturbance was generated from
an external source only present during the azimuth measurement.
There is some difference in power of the 49 Hz disturbance between
azimuth and elevation. If the disturbance is generated by the power grid
this difference may depend on the power consumption of the motors in the
different measurements.
These explanations are only speculations but will not be investigated
further here.
2.10.2
Resolver signal noise
Compared to the quantization resolution the noise level of the gyro signal
is much higher than the resolver signal. The effects of the quantizer can
thus not be neglected. The overall noise level is however relatively low. The
variance estimated from a 2000 sample measurement with the system steady
can be seen in (2.40) below.
σ̃r2 =
2000
1 X 2
NR (n) ≈ 2.9 · 10−9
2000
(2.40)
n=1
The noise has low correlation between the samples. This is illustrated
by the auto-correlation estimate from the same measurement in Figure 2.20.
CHAPTER 2. MODELING
33
−9
3
x 10
2.5
2
R
1
N
r (k)
1.5
0.5
0
−0.5
−1
−1.5
−1000 −800
−600
−400
−200
0
200
k (samples)
400
600
800
1000
Figure 2.20: Auto-correlation estimate of resolver signal noise.
Chapter 3
Model Validation
To ensure that the main dynamics and limiting factors of the system are
captured by the simulation model, some experiment data will be compared
to simulation results. The data from real measurements are limited, especially in elevation where open loop experiments are not suitable, due to the
mechanical limitations.
3.1
Triangular wave input
A low frequency triangular wave is used as input in azimuth. Because the
triangular wave has most of its energy at low frequencies the current can
be assumed to follow the reference when the PWM is not saturated. The
generated torque is then given by (3.1).
τ≈
Kt
u
Kj
(3.1)
From the experiment results depicted in Figure 3.1 an approximate value
of the Coulomb friction torque can be determined.
With a gradually increasing torque and the system at rest, the Coulomb
friction torque is obtained as the level of torque which makes the system
move. From the measurements that is approximatlly when the control signal reaches 5V. The Coulomb friction torque approximation can then be
obtained by (3.2).
fc ≈
6.6
Kt
u≈
· 5 ≈ 21 Nm
Kj
1.6
(3.2)
Simulation results with the Coulomb friction torque level in (3.2) and
the same control signal as in Figure 3.1 are depicted in Figure 3.2. The level
of control signal needed to get the system moving seems to be the same.
That is expected since the level of friction torque was derived from the same
34
CHAPTER 3. MODEL VALIDATION
35
angular velocity (rad/s)
2
1
0
-1
-2
-3
0
2
4
6
8
10
time (s)
12
14
16
18
20
0
2
4
6
8
10
time (s)
12
14
16
18
20
control signal
10
Fc5
0
-Fc-5
-10
Figure 3.1: Gyro signal from low frequency triangular wave input experiment.
CHAPTER 3. MODEL VALIDATION
36
experiment. The gain of the simulation model seems to be higher than the
actual system. There can be many reasons for that.
The moment of inertia was approximated based on the total size and
weight of the system, thus it is not very exact. A higher moment of inertia
would not affect the level of torque required to get the system moving, but
it would affect the gain. A model change is however not motivated due to
the uncertainties in the friction torque model and lack of measurement data.
Even if the error lies in the friction torque model the data available is
not enough to motivate a more complex friction torque model. The simulation results can thus be considered acceptable with respect to the above
measurement.
3
Simulation
Experiment
2
angular velocity (rad/s)
1
0
−1
−2
−3
0
2
4
6
8
10
time (s)
12
14
16
18
20
Figure 3.2: Gyro signal from experiment and simulation with the control
signal in Figure 3.1 and 21 Nm Coulomb friction torque.
If none of the internal states are saturated the system is expected to act
like a first order system according to section 2.7. The angular acceleration
is then given by (3.3).
ω̇ ≈ 1.37u − 0.043ω
(3.3)
At reachable velocities the approximation given by (3.4) can be made.
1.37u >> 0.043ω ⇒ ω̇ ≈ 1.37u
(3.4)
With the 5V of the control signal used to overcome the friction torque,
three different modes (3.5a, 3.5b, 3.5c) can be expected.
CHAPTER 3. MODEL VALIDATION
37
ω=0
⇒ ω̇ = 0
|u| < 5
ω > 0 ⇒ ω̇ = 1.37(u − 5)
ω < 0 ⇒ ω̇ = 1.37(u + 5)
(3.5a)
(3.5b)
(3.5c)
How the angular acceleration depends on the control signal is illustrated
in Figure 3.3, both for simulation and experiment data. The angular acceleration can be computed by differentiating the gyro signal. Unfortunately
this amplifies the noise a lot. The noise can be removed from the simulation
model but not from the real measurements. To reduce the noise, the gyro
signal is therefore low-pass filtered before differentiating.
Not unexpected, the approximation is almost a perfect match for the
simulation results. The exceptions are the loops at the endpoint where the
control signal is close to 10V or −10V. This depends on that the PWM
circuit gets saturated when the back EMF and the control signal gets too
high. In the real experiment data, the same thing can be observed but
only at control signals close to −10V and not to the same extent as in the
simulations.
By looking at the angular velocity from the experiments in Figure 3.1 it
can be seen that it is higher in the negative direction. The difference most
likely depends on non symmetrical friction torque. At low frequancies the
suspected saturation in the PWM circuit occurs when the condition in (3.6)
is fulfilled.
R
Umax
· sgn(u) − ωKb <
·u
2
Kj
(3.6)
From Figure 3.3 it seems like the PWM is saturated when the control
signal drops below −9V. With the constants used in the simulation model
the required angular velocity to saturate the PWM is given by (3.7).
ω<
R
Kj
·u−
Umax
2
Kb
· sgn(u)
≈ 1.38 rad/s
(3.7)
The critical level (3.7) is reached in the negative but not in the positive
direction during the measurement. When the power supply voltage is not
sufficient, the increased control signal will not result in a higher acceleration.
This results in the loops seen at the end points in Figure 3.3..
3.2
Relay feedback test
Relay feedback experiments were performed both in azimuth and elevation.
The relay feedback set up is illustrated in Figure 3.4.
CHAPTER 3. MODEL VALIDATION
38
2
angular acceleration (rad/s )
Simulation Results
5
0
−5
−10
−5
0
control signal (u)
5
10
5
10
2
angular acceleration (rad/s )
Experiment Data
5
0
−5
−10
−5
0
control signal (u)
Figure 3.3: Approximated angular acceleration at different control signal
levels with a rectangular wave input in simulation (upper) and real experiment (lower).
d
r
!
e
u
y
d
1
Figure 3.4: Block diagram of a process with relay feedback.
CHAPTER 3. MODEL VALIDATION
The experiment scheme can be described by (3.8).
u = d · sgn(e)
e=r−y
⇒ u = −d · sgn(y)
r=0
39
(3.8)
If the system has a phase shift of −π radians at any frequency (ωπ ) it
will get into sustained oscillations at that frequency. The input will then be
a rectangular wave with the same frequency and the same amplitude as the
relay (d).
By expressing a rectangular wave with amplitude d as a Fourier series it
can be seen that it is a sinusoidal with the same frequency and amplitude
4d/π and higher frequency transients with lower amplitude. Because the
system has low-pass properties the transients will be damped much more
and the output will be close to a single frequency sinus.
Since the control signal has opposite sign of the output the phase shift
will be −π radians. With oscillation amplitude A the gain of the system at
ωπ can be approximated by (3.9).
Aπ
(3.9)
4d
The output in the relay experiments are the gyro signals. In the linear
region the system is expected to behave like a first order systems with a
delay, see (3.10).
Kπ ≈
Ĝ(s) =
α −sL
e
s+β
(3.10)
The system pole is very slow. Thus the expected oscillation frequency
can be given by (3.11).
ωπ
π
arctan
(3.11)
+ ωπ L = π ⇒ {ωπ >> β} ⇒ ωπ ≈
β
2L
The delay depends on the computation time in the controller. There
may also be some additional delay caused by the DA/AD converters. To
get similar results in simulation as in experiments, the delay is set to three
period times of the controller. It is important to notice that the delay may
also be caused by some un-modeled dynamics. To be sure of this, further
investigation would be required.
3
≈ 0.006 s
(3.12)
512
At the low velocity oscillations generated by the relay feedback the friction torque seems to have almost no effect. This behavior may be better
described with a displacement friction torque model [5]. The measurement
L̂ ≈
CHAPTER 3. MODEL VALIDATION
40
data available is not sufficient to create such a model. It is however important to capture this properties to enable simulations of the relay feedback
and the oscillations generated with a too small amplitude margin in feedback
control. The new friction torque model is depicted in Figure 3.5. It should
be kept in mind that this model is simplified due to lack of measurement
data.
friction torque (Nm)
30
20
10
0
−10
modified Coulomb friction torque
Coulomb friction torque
−20
−30
−3
−2
−1
0
velocity (rad/s)
1
2
3
Figure 3.5: Friction torque model used in simulation compared to standard
Coulomb friction torque.
With the model structure in (3.10) and the approximation that β is small,
the value of α can be derived from the relay feedback results as follows.
Aπωπ
(3.13)
4d
The resulting α̂ from both simulation and experiments in azimuth, seen
in Figure 3.6, matches the linear model in (2.23) very well. The system
seems to behave in a linear fashion and according to the model for all tested
values of d.
The results from relay feedback in elevation, seen in Figure 3.7, distinguish from azimuth. At a relay amplitude of 2.5 the value of α̂ is close to
expected from (2.24). The system gain decreases with an increased value of
d both in simulation and experiments. This is probably because the PWM
gets saturated.
α̂ = Kπ ωπ =
3.3
Step response
Due to the mechanical limitations in elevation, open loop step response
experiments can not be performed without hitting the end points. There
are no such limitations in azimuth. The resulting azimuth gyro signals from
CHAPTER 3. MODEL VALIDATION
41
1
2
A π f / 2d
1.5
Experiment
Simulation
0.5
0
0
2
4
6
relay amplitude (d)
8
10
12
frequency (Hz)
60
40
20
0
Experiment
Simulation
0
2
4
6
relay amplitude (d)
8
10
12
Figure 3.6: Resulting gain and oscillation frequency of azimuth gyro from
relay feedback.
CHAPTER 3. MODEL VALIDATION
42
5
Experiment
Simulation
3
2
A π f / 2d
4
2
1
0
0
2
4
6
relay amplitude (d)
8
10
12
frequency (Hz)
50
40
30
20
Experiment
Simulation
10
0
0
2
4
6
relay amplitude (d)
8
10
12
Figure 3.7: Resulting gain and oscillation frequency of elevation gyro from
relay feedback.
CHAPTER 3. MODEL VALIDATION
43
tests with different amplitudes of steps are depicted in Figure 3.8. The
reason that the signals are noisy at high velocities is because the gyro signal
is saturated and the velocity is approximated by differentiating the resolver
signal.
5
angular velocity (rad/s)
4
3
10V
2
7.5V
5V
1
4.5V
0
−1
2.5V
0
2
1V
4
6
8
10
12
14
time (s)
Figure 3.8: Azimuth gyro step response for different step amplitudes.
Steps up to 5V does not have a very high influence on the system due
to friction torque. This concurs with the results from the triangular wave
experiment. With 5V of control signal used up by friction torque and a
system that is almost an integrator with a gain of 1.37, according to (2.23),
the expected 7.5V and 10V step responses are given by (3.14).
1.37(7.5 − 5)t = 3.4t, u = 7.5V
(3.14)
ϕ̇(t) =
1.37(10 − 5)t = 6.8t, u = 10V
In Figure 3.9 a comparison between the step responses and the integrators is made. The integrators are almost perfect matches of the step
responses at low velocities. The reason that the system is damped at higher
velocities is because the power supply voltage is not enough to generate the
demanded current due to the back EMF.
The difference between maximum velocity in the 7.5V and 10V tests
is very small. This also matches the model. The main limiting factor of
achievable velocity is the available voltage from the power supply. When
the velocity increases, so does the back EMF. The system can not accelerate
more when the maximum voltage of the power supply is needed to generate
the torque required to overcome the friction torque.
CHAPTER 3. MODEL VALIDATION
44
3.5
7.5V step response
10V step response
3.4 t
6.8 t
3
angular velocity (rad/s)
2.5
2
1.5
1
0.5
0
−0.5
0
0.05
0.1
0.15
0.2
0.25
time (s)
0.3
0.35
0.4
0.45
0.5
Figure 3.9: Azimuth gyro step response for 7.5V and 10V steps compared
to respective integrator approximation.
Chapter 4
System identification
Like mentioned in the introduction, the system identification algorithm in
the auto-tuning must be recursive. This is because large batches of data can
not be stored in the current controller implementation. A limited number
of variables may however be stored and used by the algorithm. This chapter
will initially describe how the identification is performed in the currently
used manual tuning. Some different proposals for automatic identification
algorithms applicable on the system will then be reviewed.
4.1
Identification of frequency response with a frequency response analyzer
The control design is today based on a measurement of the frequency response. The measurement is performed with an apparatus called frequency
response analyzer. The frequency response analyzer is physically connected
to the system as depicted in Figure 4.1.
FRA
Figure 4.1: Block diagram of system during measurements of the frequency
response with the frequency response analyzer.
A sinusoidal disturbance is generated in the frequency response analyzer
45
CHAPTER 4. SYSTEM IDENTIFICATION
46
and added to the control signal. Since the system has feedback from the
coarse gyro signal, with zero as reference, the controller will try to compensate for the disturbance. The gyro output signal is a voltage with a span
from −10V to 10V where 1V corresponds to ∼ 0.26 rad/s. The frequency
response analyzer measures the disturbed control signal (x) and controller
output (y). If both the system G(s), and controller F (s), are linear, x and
y can be described by (4.1).
x(t) = Ax sin (ωt + ϕx )
(4.1)
y(t) = Ay sin (ωt + ϕy )
The open loop transfer function is given by (4.2).
G(jω)F (jω) = −
Y (jω)
X(jω)
(4.2)
By estimating the amplitude and phase of x and y the gain and phase
of the open loop can be derived by (4.3) and (4.4).
|G(jω)F (jω)| =
Ay
Ax
(4.3)
arg (G(jω)F (jω)) = π + ϕy − ϕx
(4.4)
To estimate amplitude and phase of x(t) and y(t) the signals are first
multiplied by a sine and cosine of the same frequency. Each signals is thereby
divided into two signals like in (4.5).
a1 (t) = x(t) · sin (ωt) = Ax cos (ϕx ) sin2 (ωt) + cos (ϕx ) sin (ωt) cos (ωt) a2 (t) = x(t) · cos (ωt) = Ax sin (ϕx ) cos2 (ωt) + cos (ϕx ) sin (ωt) cos (ωt)
(4.5)
By averaging a1 (t) and a2 (t) over a number of periods the results ā1 and
ā2 are given by (4.6).
ā1 =
ā2 =
Ax
2
Ax
2
cos (ϕx )
sin (ϕx )
(4.6)
The amplitude can now be determined from (4.7) and the phase from
(4.8).
q
q
4ā21 + 4ā22 = A2x sin2 (ϕx ) + cos2 (ϕx ) = Ax
(4.7)
arctan
ā2
ā1
= arctan
sin (ϕx )
cos (ϕx )
= ϕx
(4.8)
CHAPTER 4. SYSTEM IDENTIFICATION
47
The results from frequency response analyzer measurements in azimuth
with different disturbance amplitudes and the controller given by (4.9) compared to the linear model in (2.23) with the same controller and a time delay
of 3/512 seconds are depicted in Figure 4.2. The gain is scaled so that the
output is in rad/s.
F (s) =
s + 20π
s + 2π
(4.9)
Gain
20
0
Gain (dB)
−20
−40
−60
−80
3V
5V
7V
9V
Linear model
−100
0
10
1
10
frequency (Hz)
2
10
Phase
50
0
Phase (deg)
−50
−100
−150
−200
−250
−300
−350
0
10
3V
5V
7V
9V
Linear model
1
10
frequency (Hz)
2
10
Figure 4.2: Frequency response of the open loop with controller given by
eq. 4.9 estimated by the frequency response analyzer with different disturbance levels compared to the linear model.
Because the controller is known and linear, it can be compensated for to
get the frequency response of the system alone by filtering the open system
trough the inverse of the controller. The resulting frequency response from
the above measurement can be seen in Figure 4.3.
It can be seen in Figure 4.3 that the results differ a lot between the frequency response analyzer measurements and the derived linear model. The
measured gain is much higher and the phase lag is lower for low frequencies.
This implies that the model is incorrect or the measurement is faulty.
It is important to remember that the frequency response is only valid for
linear systems. Nonlinearities like saturations or friction torque will distort
CHAPTER 4. SYSTEM IDENTIFICATION
48
Gain
0
Gain (dB)
−20
−40
−60
−80
3V
5V
7V
9V
Linear model
−100
0
10
1
10
frequency (Hz)
2
10
Phase
100
Phase (deg)
0
−100
−200
−300
−400
0
10
3V
5V
7V
9V
Linear model
1
10
frequency (Hz)
2
10
Figure 4.3: Frequency response of the system estimated by the frequency
response analyzer with different disturbance levels compared to the linear
model.
the single frequency signals, thus affecting the frequency content.
The results from simulations of a frequency response analyzer measurement compared to the linear model are depicted in Figure 4.4. Here it can
be seen that the friction torque not only affects the gain, which is intuitive,
but also the phase. One of the main concerns with the frequency response
analyzer measurement is the lack of control over internal signal levels. The
disturbance amplitude can be used for tuning these levels but because the
system has feedback the input level will be highly dependent on the open
loop dynamics.
The best way to investigate whether the measurement results are faulty
or not would be to store the actual input and output of the system during a
measurement. This way the results could not only be verified or discarded,
but in the latter case the new information would probably help identifying
the cause of the error. If the logging of data is not possible during frequency response analyzer measurements a similar experiment could easily
be performed in software.
CHAPTER 4. SYSTEM IDENTIFICATION
49
Gain
20
Simulation with 21Nm friction torque
Simulation with no friction torque
Linear model
Gain (dB)
0
−20
−40
−60
0
10
1
10
frequency (Hz)
2
10
Phase
−50
Phase (deg)
−100
−150
−200
−250
−300
−350
0
10
Simulation with 21Nm friction torque
Simulation with no friction torque
Linear model
1
10
frequency (Hz)
2
10
Figure 4.4: Frequency response estimate generated by frequency response
analyzer measurements on the simulation model.
4.2
Relay feedback identification
The relay feedback test, described in section 3.2, has many advantages and
is frequently used for auto-tuning. It has only one tuning parameter which
makes it easy to implement on any system with minor adjustments.
Some issues, depending on the digital implementation and demand of a
recursive identification, must however be considered as well as robustness to
model errors and noise sensitivity.
4.2.1
Additional time delay due to sampling
In the relay feedback the input and output is supposed to have different
signs at all time. If the relay, like in this case, is implemented in a sampled
controller the sign of the output will switch at the first sample after sign
switch of the output. This will cause an additional time delay like illustrated
in Figure 4.5 where the circles represents the samples.
This additional time delay can take values between 0 s and 1/fs s and
will affect the phase of the system. The frequencies of system oscillations
will be lower and the gain higher if the system has low-pass characteristics,
which is assumed to be the case.
If the sampling time is not a multiple of the oscillation period the addi-
CHAPTER 4. SYSTEM IDENTIFICATION
50
Figure 4.5: Control signal (u) in oscillating system with output (y) under
relay feedback with a sampled relay.
tional time delay will vary between the zero-crossings. If the delay increase
the oscillation frequency will decrease. The only stable frequencies are thus
ones with half period times that are multiples of the sampling time. If the
sampling frequency is much higher than the oscillation frequency this can be
neglected because of the small phase lag caused by a delay of one sampling
period.
The results from relay gyro feedback both in simulation and real experiments verify this by only containing the frequencies 256/6 Hz and 256/7 Hz
both in azimuth and elevation.
An approximation of the time delay can easily be made by linear interpolation between the samples before and after the crossing by (4.10). This
will give a good approximation if the output is a sinusoidal and the sampling
frequency is at least ten times the output frequency.
T̂sd =
4.2.2
|y(n − 1)|
fs |y(n) − y(n − 1)|
(4.10)
Recursive frequency and amplitude estimation
The frequency and amplitude of the oscillations must be estimated recursively because the system identification can not save a large amount of data.
The proposed method is similar to Pizarenko’s method, described in [6].
Pizarenko’s method can be used to estimate the amplitude, frequency and
noise level of a sampled sinusoidal with white noise. The method uses the
eigenvectors of the 3x3 correlation matrix.
In this case only the amplitude and frequency is of interest. The signal
model is a sinusoidal with unknown phase and added white noise, see (4.11).
CHAPTER 4. SYSTEM IDENTIFICATION
51
Y (n) = A sin(2π ffs n + φ) + W (n)
rW (k) = σ 2 δ(k)
φ ∼ U (0, 2π)
(4.11)
The auto-correlation of the signal for a lag of 0 to 2 samples are given
by (4.12).
rY (0) = E Y (n)2 =
A2
2
+ σ2
rY (1) = E [Y (n)Y (n + 1)] = E Y 2 =
rY (2) = E [Y (n)Y (n + 2)] =
A2
2
A2
2
cos (2π ffs )
(4.12)
cos (4π ffs )
From the correlation the relations in (4.13) and (4.14) can be derived.
q
rY2 (2) + 8rY2 (1) − rY (2) =
A2
2
=
A2
2
=
A2
2
= A2
q
cos2 (4π ffs ) + 8 cos2 (2π ffs ) − cos (4π ffs )
q
cos2 (4π ffs ) + 4 cos (4π ffs ) + 4 − cos (4π ffs )
!
r
2
f
f
cos (4π fs ) + 2 − cos (4π fs )
(4.13)
arccos
2
f
f
rY (1) = arccos cos (2π ) = 2π
2
A
fs
fs
(4.14)
The amplitude and frequency can thus be estimated with rY (1) and
rY (2) only, according to (4.15) and (4.16). This way the number of parameters to estimate are reduced from three to two compared to Pizarenko’s
method.
rq
A=
rY2 (2) + 8rY2 (1) − rY (2)
fs · arccos A22 rY (1)
f=
2π
The correlation estimate in (4.17) will be used.
r̂Y (k) =
N
X
1
y(n)y(n − k)
N −k
n=k+1
(4.15)
(4.16)
(4.17)
CHAPTER 4. SYSTEM IDENTIFICATION
52
The estimation of rY (1) and rY (2) can be performed recursively as shown
in (4.18). The only parameters that need to be saved are: the output signal
two samples back, a sample counter (N ) and the estimates of rY (1) and
rY (2) from the previous sample. The output signal is already stored to
enable filtering so there are only three additional parameters.
r̂Y (k)n =
4.2.3
1
1−
N −k
r̂Y (k)n−1 +
1
y(n)y(n − k)
N −k
(4.18)
Oscillation estimation convergence
Because the signal is periodic with high frequency, the estimation convergence is expected to be very fast. If the estimation is initiated at the start of
the relay test the convergence is dependent on how fast the system goes into
sustained oscillations. As illustrated in Figure 4.6, the sustained oscillations
appears almost immediate after the test is initiated and does therefore not
affect the convergence to the extent that it has to be dealt with.
0.08
angular velocity (rad/s)
0.06
0.04
0.02
0
−0.02
−0.04
−0.06
−0.08
0.02
0.04
0.06
0.08
time (s)
0.1
0.12
0.14
Figure 4.6: Gyro signal at start of a relay feedback test.
The convergence of the amplitude and frequency estimates from azimuth
gyro relay feedback can be seen in Figure 4.7. The convergence is like
predicted very fast.
4.2.4
Results from simulation
If the system behavior is similar to an integrator with a time delay at the
oscillation frequency, as assumed in this case, the oscillation period should
be independent of the relay amplitude and the oscillation amplitude should
be proportional to the relay amplitude. Due to additional delays caused by
53
0.06
0.04
0.02
Oscillation frequency estimate
Oscillation amplitude estimate
CHAPTER 4. SYSTEM IDENTIFICATION
0
0
0.05
0.1
0.15
0.2
0.25
time (s)
0.3
0.35
0.4
0.45
0.5
0
0.05
0.1
0.15
0.2
0.25
time (s)
0.3
0.35
0.4
0.45
0.5
60
40
20
0
Figure 4.7: Estimation convergence of oscillation amplitude and frequency
in azimuth gyro relay feedback.
sampling the frequency may however vary to some extent. By multiplying
the amplitude and frequency, a measure more linearly dependent of the relay
amplitude is received.
The simulation results from azimuth relay feedback with different relay
amplitudes in Figure 4.8 verifies the above predictions. The same thing
holds for tests performed on the real system. Since the frequency does not
vary a lot this only implies that the system behaves linearly. With a richer
variation of frequencies, information of system order could be extracted.
The linear relation between relay amplitude and oscillation amplitude
does however only seem to be valid up to a relay amplitude of about 2V in
elevation. The same holds for both simulations, seen in Figure 4.9, and experiments, which most likely comes from poor tuning of the current feedback
in TR-Driv.
The control signal is a scaled reference for the current. If the maximum
voltage is not sufficient to reach the demanded current the PWM circuit will
saturate. With a scaling factor (Kj ) of 1.6, the motor data from Appendix A
and a maximum voltage of ±40V, the control signal amplitude for different
frequencies required to saturate the PWM are given in Figure 4.10.
With the present limit of 10V on the control signal only about 1/5 can
actually be used in elevation. At higher control signal levels the PWM will
saturate and increasing the level will not have any effect on the system. This
is not desirable and can be avoided in three ways.
CHAPTER 4. SYSTEM IDENTIFICATION
54
A
0.1
0.05
frequency (Hz)
0
0
1
2
3
4
5
6
relay amplitude
7
8
9
10
0
1
2
3
4
5
6
relay amplitude
7
8
9
10
0
1
2
3
4
5
6
relay amplitude
7
8
9
10
45
40
35
A⋅f
4
2
0
Figure 4.8: Oscillation amplitude and frequency for simulation of azimuth
gyro relay feedback with different relay amplitudes.
A
0.05
frequency (Hz)
0
0
1
2
3
4
5
6
relay amplitude
7
8
9
10
0
1
2
3
4
5
6
relay amplitude
7
8
9
10
0
1
2
3
4
5
6
relay amplitude
7
8
9
10
45
40
A⋅f
2
1
0
Figure 4.9: Oscillation amplitude and frequency for simulation of elevation
gyro relay feedback with different relay amplitudes.
CHAPTER 4. SYSTEM IDENTIFICATION
55
14
Azimuth
Elevation
Control signal amplitude (V)
12
10
8
6
4
2
0
0
10
20
30
40
50
60
Frequency (Hz)
70
80
90
100
Figure 4.10: Control signal amplitude required to saturate the PWM with
a current feedback gain of 1.6.
• Increase the voltage from the power supply.
• Decrease the maximum control signal.
• Increase the current scaling factor (Kj ).
To increase the voltage will not only get rid of the problem but also make
the system faster. The problem is that by increasing the voltage enough the
achievable current is twice the specified maximum current for the motor and
will thus probably cause the motor to burn up.
The two latter alternatives will have the same effect and the preferred
method is the one which is easiest from an implementation perspective.
The results from gyro relay feedback in experiments and simulation gives
a fast converging and good estimate of the system gain and frequency where
the system phase is −180 degrees. To detect saturations like the one occurring in elevation the relay amplitude can start at a low gain and gradually
be increased until the system gain starts to diminish. This can both be used
to detect the saturation level and to avoid the effects it will have on the
identification. It would however be preferred to tune the system to get rid
of the saturation.
4.2.5
Robustness to resonances
The resonances detected in the radar directors and described in section 2.8
may affect the relay feedback test. The model error between the torque and
CHAPTER 4. SYSTEM IDENTIFICATION
56
angular velocity will here be described by a linear system with two complex
conjugated poles and a zero at the same frequency. The effects on the relay
feedback test are evaluated by simulation with resonance frequencies of 30Hz
and 60Hz. The frequencies are chosen to be both higher and lower than the
self oscillation frequency of the system and close to the ones of the radar
director. The results are depicted in Figure 4.11 and 4.12.
Oscillation amplitude estimate
0.25
f = 60 Hz
0.2
r
f = 30 Hz
r
0.15
no resonance
0.1
0.05
0
0
1
2
3
4
5
time (s)
6
7
8
9
10
Oscillation frequency estimate
70
f = 60 Hz
60
r
f = 30 Hz
r
50
no resonance
40
30
20
10
0
1
2
3
4
5
time (s)
6
7
8
9
10
Figure 4.11: Oscillation estimation results from simulation of azimuth gyro
relay feedback with a resonance frequency of fr Hz.
The resonance causes the phase to drop at the resonance frequency. The
phase drop in the used resonance model is very steep and has very little
influence on the phase at lower frequencies. This explains why the 30Hz resonance causes the relay feedback oscillation frequency to drop and thus the
amplitude to increase while the 60Hz resonance does not have any influence
on the oscillation frequency. The convergence of the oscillation approximation is still fast and the test seems to be robust. It should be kept in mind
that even though the relay feedback test seems robust when it comes to
finding the frequency and gain where the system has −180 degrees phase
lag, the information received may not be sufficient for good control design.
4.2.6
Sensitivity to signal noise
The gyro signal levels in relay feedback are relatively low. This makes it
extra important to investigate the influence of signal noise. The gyro sig-
Oscillation amplitude estimate
CHAPTER 4. SYSTEM IDENTIFICATION
57
0.25
0.2
fr = 60 Hz
fr = 30 Hz
0.15
no resonance
0.1
0.05
Oscillation frequency estimate
0
0
1
2
3
4
5
time (s)
6
7
8
9
10
70
fr = 60 Hz
60
fr = 30 Hz
no resonance
50
40
30
20
0
1
2
3
4
5
time (s)
6
7
8
9
10
Figure 4.12: Oscillation estimation results from simulation of elevation gyro
relay feedback with a resonance frequency of fr Hz.
0.08
0.06
0.04
σ = 0.01
σ = 0.001
σ = 0.0001
0.02
Oscillation frequency estimate
Oscillation amplitude estimate
nal noise in the measured signals described in section 2.10.1 shows both
white noise and 50Hz content. The noise levels may vary depending on how
the wiring is done and the surrounding environment. Simulations of relay
feedback with different levels of white noise and 50Hz sinusoidal noise are
therefore performed and the results are depicted in Figure 4.13 to 4.16.
0
0
0.1
0.2
0.3
0.4
0.5
time (s)
0.6
0.7
0.8
0.9
1
60
40
σ = 0.01
σ = 0.001
σ = 0.0001
20
0
0
0.1
0.2
0.3
0.4
0.5
time (s)
0.6
0.7
0.8
0.9
1
Figure 4.13: Oscillation estimation results from simulation of azimuth gyro
relay feedback with different levels of white signal noise.
The influence of white noise on the test results and estimation conver-
CHAPTER 4. SYSTEM IDENTIFICATION
58
Oscillation amplitude estimate
0.05
0.04
0.03
σ = 0.01
σ = 0.001
σ = 0.0001
0.02
0.01
Oscillation frequency estimate
0
0
0.1
0.2
0.3
0.4
0.5
time (s)
0.6
0.7
0.8
0.9
1
60
50
40
σ = 0.01
σ = 0.001
σ = 0.0001
30
20
0
0.1
0.2
0.3
0.4
0.5
time (s)
0.6
0.7
0.8
0.9
1
Figure 4.14: Oscillation estimation results from simulation of elevation gyro
relay feedback with different levels of white signal noise.
Oscillation amplitude estimate
0.1
0.08
0.06
0.04
A50 = 0.1
A50 = 0.01
0.02
A
50
0
0
0.1
0.2
0.3
0.4
0.5
time (s)
0.6
0.7
0.8
= 0.001
0.9
1
Oscillation frequency estimate
70
60
50
40
A50 = 0.1
30
A50 = 0.01
20
10
A50 = 0.001
0
0.1
0.2
0.3
0.4
0.5
time (s)
0.6
0.7
0.8
0.9
1
Figure 4.15: Oscillation estimation results from simulation of azimuth gyro
relay feedback with different levels of 50Hz signal noise.
CHAPTER 4. SYSTEM IDENTIFICATION
59
Oscillation amplitude estimate
0.06
0.05
0.04
0.03
A50 = 0.1
0.02
A50 = 0.01
0.01
0
A50 = 0.001
0
0.1
0.2
0.3
0.4
0.5
time (s)
0.6
0.7
0.8
0.9
1
Oscillation frequency estimate
70
60
50
40
A50 = 0.1
A50 = 0.01
30
A50 = 0.001
20
0
0.1
0.2
0.3
0.4
0.5
time (s)
0.6
0.7
0.8
0.9
1
Figure 4.16: Oscillation estimation results from simulation of elevation gyro
relay feedback with different levels of 50Hz signal noise.
gence seems to be very small for much higher levels than those detected in
the system. The problems start to occur when the noise level gets close to
the actual signal level. Then the noise will cause frequent zero crossings
which will interrupt the periodicity of the control signal.
The 50Hz sinusoidal signals have a larger impact on the results than the
white noise. The differences in the results caused by the tested amplitudes,
which are much higher than the ones detected in the system, are moderate.
Because the sinusoidal noise has high correlation with near by samples it
will affect the correlation estimates used to detect the oscillations.
4.3
Parameter fitting with Recursive Least-squares
(RLS) algorithm
The prior knowledge of the system can be used to form a system model
structure. A model that is linearly dependent of measurable or observable
states can be written on the form (4.19). This does not preclude a non-linear
model because the states themselves can be non-linearly dependent.
CHAPTER 4. SYSTEM IDENTIFICATION
y =θ·x=
θ1 θ2 . . . θN
60
x1
x2
..
.
xN
N
X
θn xn
=
n=1
(4.19)
If a larger number of samples than the model order is available, model
parameters that gives a perfect fit can normally not be found. The parameters can then be chosen so that the square error is minimized according to
(4.20).
min
θ
M
X
m=1
(y(m) − θ · x(m))2
(4.20)
The solution to 4.20 is given by the LMS (least mean square approximation) [9] given by (4.21) and (4.22).
A=
x1 (1)
x1 (2)
..
.
x2 (1)
x2 (2)
..
.
...
...
xN (1)
xN (2)
..
.
x1 (M ) x2 (M ) . . . xN (M )
,y =
y(1)
y(2)
..
.
y(M )
θ̂ = A+ y
(4.21)
(4.22)
If A has full rank the solution is given by (4.23).
θ̂ = AT A
−1
AT y
(4.23)
The above solution can unfortunately not be implemented directly because of the lack of possibility to store data. The recursive RLS (Recursive
Least-squares) algorithm [3] will instead be used. This algorithm, eq. 4.244.26, will give the same results as the LMS approximation when the amount
of data grows, and only the states from the previous sample are needed. The
algorithm is often used in adaptive control. A forgetting factor putting less
weight on minimizing the square error in old samples is then normally used.
This is not needed here since the system is assumed to be time invariant
during the identification.
θ̂(m) = θ̂(m − 1) + K(m) y(m) − xT (m)θ̂(m − 1)
(4.24)
−1
K(m) = P (m − 1)x(m) I + xT (m)P (m − 1)x(m)
P (m) = I − K(m)xT (m) P (m − 1)
(4.25)
(4.26)
CHAPTER 4. SYSTEM IDENTIFICATION
61
The RLS identification requires more tuning than the relay feedback.
To perform the test a suitable model structure and input signal must be
derived. The test can both be performed in open and closed loop. This is
also something that needs to be considered from case to case.
The parameters that needs to be stored are the elements in the matrix
P and the estimation of θ from the previous sample. For a model with N
parameters the total number of extra values to store is N (N + 1) if the
states in the model are already stored. For the first sample initial values
needs to be assigned. The fastest convergence is achieved if the initial values
are chosen such that the elements of P −1 are small and θ is close to the final
value.
4.3.1
Model structure
The aim of the RLS identification is to estimate the system in the linear
region where none of the states are saturated. This is because a general
model that includes the internal saturations can not be written in form
(4.19) and it is desirable to lie in the linear region during operation.
For a first order linear system (4.27) with constant control signal between
samples as assumed in this case the equivalent discrete model in (4.28) can
be derived.
α
U (s)
s+β
β
β
α
1 − e− fs u(n)
y(n + 1) = e− fs y(n) +
β
Y (s) =
(4.27)
(4.28)
By RLS estimation of θ1 and θ2 in 4.29 the continuous linear model
parameters can thus be approximated.
β = −fs ln (θ1 )
y(n + 1) = θ1 y(n) + θ2 u(n) ⇒
(4.29)
α = βθ−2 β
1−e
fs
The system has a lot of friction torque which is not included in the
model 4.28. Even if only the linear model without friction torque is required
the friction torque should be represented in the identification model. Otherwise the model structure is too poor and the parameters will not converge.
The alternative model (4.30) and (4.31) will thus give better parameter convergence with Coulomb friction torque.
β
y(n + 1) = e− fs y(n) +
β α
1 − e− fs (u(n) − uf sgn(y(n)))
β
(4.30)
CHAPTER 4. SYSTEM IDENTIFICATION
62
β = −fs ln (θ1 )
α = βθ−2 β
y(n + 1) = θ1 y(n) + θ2 u(n) + θ3 sgn(y(n)) ⇒
1−e fs
u = − θ3
f
(4.31)
θ2
Since relatively small deviations in β has a much lower impact on the
system behavior than α and uf , it will not convert as fast. Because there is
some dynamics between the input and the friction torque and the fact that
the Coulomb friction torque model is not accurate, β may even convert to
the wrong value depending on the control signal. Like shown in chapter 5,
β can be excluded from the control design. Thus a third model structure,
given by (4.32) and (4.33), was introduced that showed to give even better
convergence for both α and uf .
y(n + 1) = y(n) +
α
(u(n) − uf sgn(y(n)))
fs
y(n + 1) = y(n) + θ1 u(n) + θ2 sgn(y(n)) ⇒
4.3.2
Control signal
α = fs θ1
(4.32)
(4.33)
uf = − θθ22
The first thing that needs to be considered is if the identification should
be performed in open or closed loop. Normally open loop is to prefer in
identification but in this case closed loop will be used. This way the sufficient
signal levels can be used without jeopardizing hitting the mechanical limits
in elevation angle. To perform tests in closed loop a controller is needed that
provides a stable closed loop with sufficient bandwidth. This pre-tuning
can preferably be performed with a relay feedback test. Since the relay
feedback estimates the amplitude margin a P-controller can be designed
and used in feedback. When performing identification in closed loop the
correlation between the input and output due to feedback sometimes affect
identifiability. This does however not seems to be a problem in this case due
to the reference levels used and absence of un-modeled disturbances.
The reference signal now has to be determined. A commonly used signal
in identification is white noise because of its rich frequency content. A
control signal that gives good parameter convergence has shown to be bandpass filtered white noise. The filter used is given by (4.34) where Kt can be
used to set the signal power.
CHAPTER 4. SYSTEM IDENTIFICATION
Kt
63
s
(s + 2π)3
(4.34)
The main reason for filtering out the very low frequencies is to keep the
resolver signal low. This is important to make sure not to hit the mechanical
angle limits in elevation.
4.3.3
Identification results
The results from simulations with gyro feedback and a P-controller designed
from the relay feedback results are depicted in Figure 4.17-4.19. A band-pass
filtered white noise signal with different power levels was used as reference.
The convergence of the parameters in azimuth are fast and the final values
are close to the nominal if the signal levels are not too low. The reason for
the offset from the nominal gain depends on saturations in TR-Driv.
1.5
α
1
nominal
2
σ = 0.2
2
σ = 0.5
0.5
σ2 = 0.8
σ2 = 1.1
0
0
1
2
3
4
5
time (s)
6
7
8
9
10
6
5
u
f
4
nominal
3
2
σ = 0.2
2
2
σ = 0.5
σ2 = 0.8
1
2
σ = 1.1
0
0
1
2
3
4
5
time (s)
6
7
8
9
10
Figure 4.17: Model parameter convergence from simulations in azimuth with
RLS for model (4.33).
In elevation the parameters does not seem to convert to the correct
values. The reason for this is that TR-Driv saturates at much lower control
signals in elevation than in azimuth. This can be helped by limiting the
control signal in the controller. With a limit on the control signal of 1.5V
the results in Figure 4.19 are obtained.
The estimation does not seem to be sensitive to signal noise at moderate
levels. The high gain of the controller will however saturate the control
signal if the noise level gets too high. These problems start to affect the
CHAPTER 4. SYSTEM IDENTIFICATION
64
5
nominal
4
2
σ = 0.2
2
3
σ = 0.5
2
σ = 1.1
2
α
σ = 0.8
2
1
0
0
0.5
1
1.5
2
2.5
time (s)
3
3.5
4
4.5
5
7
nominal
6
2
σ = 0.2
5
σ = 0.5
4
σ = 0.8
2
f
2
2
u
σ = 1.1
3
2
1
0
0
0.5
1
1.5
2
2.5
time (s)
3
3.5
4
4.5
5
Figure 4.18: Model parameter convergence from simulations in elevation
with RLS for model (4.33) .
5
4
3
2
α
nominal
2
1
σ = 0.2
0
σ = 0.5
2
2
σ = 0.8
−1
−2
2
σ = 1.1
0
0.5
1
1.5
2
2.5
tme (s)
3
3.5
4
4.5
5
0.8
u
f
0.6
nominal
0.4
σ2 = 0.2
σ2 = 0.5
0.2
2
σ = 0.8
2
σ = 1.1
0
0
0.5
1
1.5
2
2.5
time (s)
3
3.5
4
4.5
5
Figure 4.19: Model parameter convergence from simulations in elevation
with RLS for model (4.33) and a control signal limit of 1.5V.
CHAPTER 4. SYSTEM IDENTIFICATION
65
parameter convergence bias at levels much higher than those detected in
the system.
Since the identification is performed with low frequency signals the high
frequency resonances does not disturb the identification. The resonances
will however not be detected in the estimated model.
The results from a RLS approximation with model 4.33 and the data
from the triangular wave experiment are depicted in Figure 4.20.
7
α
u
Parameter approximation
6
f
5
4
3
2
1
0
0
2
4
6
8
10
time (s)
12
14
16
18
20
Figure 4.20: Model parameter convergence from triangular wave experiment
data in azimuth with RLS for Model 2 (4.33).
The real experiment data also shows fast convergence. The estimated
gain from the experiment data is lower than the model. This may depend on
saturations in the PWM because the triangular experiment was performed
without feedback and with higher signal levels.
Chapter 5
Control Design
Since the system model is of first order in its linear region a simple PI
controller with anti-windup will be used. To motivate a more advanced
control scheme the system has to be modeled more in detail than what
is possible with the proposed identification methods to better capture the
behavior outside the linear region and the influence of disturbances.
5.1
The PID-controller
The alternative to the textbook PID controller in (5.1) will here be used.
The difference is that the derivative of the reference signal is removed. This
makes the controller less sensitive to discontinuous reference signals like
steps.
Z
d
1 t
e(t)dt − Td y(t)
(5.1)
u(t) = K e(t) +
Ti
dt
The derivative part will also be low pass filtered like below. Otherwise
the signal noise will yield a high control signal due to its high frequency
content.
sY ≈
s
Y
1 + sTd /N
(5.2)
Since the controller is digitally implemented the PID controller given
by (5.1), (5.2) must be discretized. The discrete approximation in (5.3) to
(5.6), where fs is the controller sampling frequency, proposed in [3] will be
used.
u(n) = uP (n) + uI (n) + uD (n)
(5.3)
uP (n) = Ke(n)
(5.4)
66
CHAPTER 5. CONTROL DESIGN
67
uI (n) = uI (n − 1) +
uD (n) =
K
e(n)
Ti fs
(5.5)
KTd N fs
Td fs
uD (n − 1) +
(y(n) − y(n − 1))
Td fs + N
Td fs + N
(5.6)
The value of N is suggested to be between 3 and 20. The filter acting
on the derivative part should be chosen based on how fast the system is and
the noise level.
5.2
Ziegler-Nichols Tuning based on relay feedback
With Ziegler-Nichols ultimate-sensitivity method [3] the PID parameters
can be tuned with the two parameters received from the relay feedback test,
namely the system gain (K180 ) and frequency (f180 ) where the phase lag is
180 degrees. The tuning rules are given by Table 5.1.
Controller Type
K
Ti
P
0.5
K180
PI
0.45
K180
1
1.2f180
PID
0.6
K180
1
2f180
Td
1
8f180
Table 5.1: Ziegler-Nichols tuning rules for relay feedback results.
The controller parameters received by Ziegler-Nichols tuning of the nominal system are depicted in Table 5.4 and 5.5.
The slow dynamics and relatively short time delay yield a controller with
a very high integral gain. This will give a closed loop system with very good
suppression of load disturbances, e.g., Coulomb friction torque. The friction
torque will however act as transient disturbances when the director velocity
switches sign.
5.3
AMIGO Tuning
The AMIGO PID tuning rules [1] for model (3.10) are proposed as an alternative to Ziegler-Nichols tuning. The PID parameters are chosen according
to Table (5.2). The AMIGO tuning is based on results from MIGO tuning
[1] on a large test batch of linear process models.
CHAPTER 5. CONTROL DESIGN
Controller Type
68
K
0.15β
α
PI
+
0.35
αL
−
Ti
1
αβ(L+ β1 )2
13L
1+12Lβ+7L2 β 2
0.35L +
0.4βL+0.8
βL+0.1 L
0.2βL+0.45
αL
PID
Td
0.5L
0.3βL+1
Table 5.2: AMIGO tuning rules for a first order system with time delay.
Since both the linear damping (β) and time delay (L) can be considered
small, the PID parameters can be approximated by Table 5.3 with almost
the same result.
Controller Type
K
Ti
Td
PI
0.35
αL
13.35L
PID
0.45
αL
8L
0.5L
Table 5.3: Approximation of AMIGO tuning rules for a slow first order
system with a small time delay.
PI ZN-tuning
PI AMIGO-tuning
PID ZN-tuning
PID AMIGO-tuning
K
88.7
43.9
118.7
56.5
Ti
1.95 · 10−2
7.82 · 10−2
1.17 · 10−2
4.69 · 10−2
2.93 · 10−3
2.93 · 10−3
Td
Table 5.4: Controller parameters tuned based on the nominal azimuth system with a time delay of 3/512 s.
The controller parameters received by AMIGO tuning of the nominal
system are depicted in Table 5.4 and 5.5.
The resulting PID/PI controller is less aggressive than the one received
from Ziegler-Nichols tuning. The most significant difference is the integrator
gain. As seen in section 4.3 the estimation of system integration gain (α) may
converge to a lower value when friction torque is introduced. This will give a
larger gain in the controller, thus potentially make the closed loop unstable.
Because the linear damping is relatively small a good approximation of α
CHAPTER 5. CONTROL DESIGN
69
PI ZN-tuning
PI AMIGO-tuning
PID ZN-tuning
PID AMIGO-tuning
K
29.7
14.7
39.6
18.9
Ti
1.95 · 10−2
7.82 · 10−2
1.17 · 10−2
4.69 · 10−2
2.93 · 10−3
2.93 · 10−3
Td
Table 5.5: Controller parameters tuned based on the nominal elevation system with a time delay of 3/512 s.
can be made based on relay feedback results. This approximation should
always be compared to the estimation from RLS to verify that the difference
is not too big.
5.4
Gyro Loop properties
Since both the azimuth and elevation gyro loop have near identical properties, except for very low frequencies, with a controller tuned by one of the
above rules, only azimuth will be treated here.
In this case the system is close to an integrator and has a small time
delay. The tuning rules give a small derivative gain for the PID controller.
Since the system is slow the derivative part of the controller will amplify
the measurement noise to the control signal more than it contributes to
the stability. A more robust controller that uses less control signal is thus
received by a PI controller. The azimuth open loop gyro loops with PI
controllers tuned by Ziegler-Nichols and AMIGO are depicted in Figure 5.1.
A comparison of some open loop properties are depicted in Table 5.6.
Amplitude margin (Am ):
Phase margin (ϕm ):
Crossover frequency (fc ):
Ziegler-Nichols
AMIGO
5.6dB
12.5dB
25o
58o
20Hz
10Hz
Table 5.6: Properties of nominal open azimuth gyro loop with a time delay
of 3/512s and PI controller parameters from Table 5.4.
The crossover frequency is strongly connected to the closed loop bandwidth. The Ziegler-Nichols tuning gives a higher bandwidth but at the cost
CHAPTER 5. CONTROL DESIGN
70
100
Ziegler−Nichols
AMIGO
Gain (dB)
50
0
−50
−1
10
0
1
10
10
2
10
frequency (Hz)
−100
Phase (deg)
−150
−200
−250
Ziegler−Nichols
AMIGO
−300
−350
−1
10
0
1
10
10
2
10
frequency (Hz)
Figure 5.1: Bode diagram of nominal open azimuth gyro loop with a time
delay of 3/512s and PI controller parameters from Table 5.4.
of low stability margins. This can also be seen in the closed loop, Figure 5.2. The bandwidth is higher with the Ziegler-Nichols tuned controller
but at frequencies close to the bandwidth the closed loop gain is higher than
0dB. This indicates a more sluggish behavior of the closed loop system than
if an AMIGO tuned controller were to be used.
Gain (dB)
10
0
−10
Ziegler−Nichols
AMIGO
−20
−30
−1
10
0
1
10
10
2
10
frequency (Hz)
Phase (deg)
0
−100
−200
Ziegler−Nichols
AMIGO
−300
−1
10
0
1
10
10
2
10
frequency (Hz)
Figure 5.2: Bode diagram of nominal closed azimuth gyro loop with PI
controller parameters from Table 5.4.
CHAPTER 5. CONTROL DESIGN
5.5
71
Anti-Windup
Both the controller given by Ziegler-Nichols tuning and AMIGO tuning have
a very high integral gain. That will give an open loop with high gain at low
frequencies and thereby good suppression of load disturbances like friction
torque. The large integral action will unfortunately also result in integral
windup [1] due to saturations in the actuators.
When the actuators are saturated an increasing control signal will not
go through to the output, thus not making the system reach the reference
faster. A controller with an integrator will still increase the control signal
until the reference is reached. If the integrator gain is large, its contribution
to the control signal will be higher than demanded to stay at the reference
when it is reached. The only way for a linear controller with an integrator
to compensate for this is to make the output go beyond the reference. This
may cause an oscillatory system with overshoot in step response.
Anti-windup is one way of dealing with this problem. The level of the
control signal that is going through to the output (ua ) is measured or estimated with an observer. An additional feedback from to the control signal
(u) and ua is introduced to the controller output (uF ) according to (5.7).
Z
1 t
(ua − u)dt
(5.7)
u = uF +
Tt
The saturations in this case are, the limit of ±10V on the control signal
and the limited voltage from the power supply. The first is measurable while
the latter is not. The saturation of the current feedback in TR-Driv will not
have the same affect on the output. If the current feedback is saturated the
PWM will also saturate due to the high gain of open current loop. This
will break the feedback and should be avoided by tuning TR-Driv to the
available voltage and motor impedance.
Due to the high gain of the integrator, a small or moderate addition to
the control signal caused by integral windup will be compensated quickly
and without large overshoots. This makes the anti-windup performance less
sensitive to saturation observer errors. Hence a satisfactory observer will be
given by (5.8) where us is the control signal required to saturate the PWM
at 0Hz, see Figure 4.10. This level can be estimated with a relay feedback
test if the time constant of the motor electronics is known.
ûa = sgn(u) · min(10, |u|, |us |)
(5.8)
Tt = Ti
(5.9)
There is no general method of choosing Tt for a PI-controller. In this
case (5.9) has shown to be a good choice and will thus be used.
Chapter 6
Simulation Results
The purpose of the gyro loop is both to provide good reference following
and disturbance suppression. This will be tested by simulations in azimuth
and elevation with the controllers designed in chapter 5 based on the model
identified with the methods in chapter 4. The anti-windup is enabled in all
results if nothing else is stated.
6.1
Reference following
The reference following properties are evaluated by step responses simulations of the gyro loop. The results depicted in Figure 6.1 and 6.2 really
emphasize advantages of anti-windup. The high overshoot and oscillating
settling is almost damped completely without sacrificing rise time. The two
controllers seem to have equivalent performance.
The 1 rad/s can be considered as a large step. Thus the control signal
will be saturated until the reference is reached for both controllers. This is
the reason for the rise time being the same. When the step size is reduced
to 0.1 rad/s the difference in performance between the controllers is better
illustrated, see Figure 6.3 and 6.4.
6.2
Disturbance suppression
The modeled disturbances are ship movements, friction torque and wind.
The two latter can be considered as torque disturbances while the ship movements act directly on the position in the earth relative coordinate system
used by the gyro.
How well the gyro loop can compensate for wind disturbances is tested
by applying a torque step disturbance on the system with gyro feedback and
zero as reference. The results, depicted in Figure 6.5 and 6.6, shows that the
Ziegler-Nichols tuned controller outperforms the AMIGO tuned controller.
72
CHAPTER 6. SIMULATION RESULTS
73
1.8
1.6
Angular velocity (rad/s)
1.4
1.2
1
0.8
0.6
Reference
Ziegler−Nichols
Ziegler−Nichols with anti−windup
AMIGO
AMIGO with anti−windup
0.4
0.2
0
−0.2
0
0.1
0.2
0.3
0.4
0.5
time (s)
0.6
0.7
0.8
0.9
1
Figure 6.1: Step response (1 rad/s) of closed azimuth gyro loop for different
controllers.
1.8
1.6
1.4
Angular velocity (rad/s)
1.2
1
0.8
0.6
0.4
Reference
Ziegler−Nichols
Ziegler−Nichols with anti−windup
AMIGO
AMIGO with anti−windup
0.2
0
−0.2
0
0.5
1
1.5
time (s)
Figure 6.2: Step response (1 rad/s) of closed elevation gyro loop for different
controllers.
CHAPTER 6. SIMULATION RESULTS
74
0.12
0.1
Angular velocity (rad/s)
0.08
0.06
0.04
0.02
Reference
Ziegler−Nichols with anti−windup
AMIGO with anti−windup
0
−0.02
0
0.1
0.2
0.3
0.4
0.5
time (s)
0.6
0.7
0.8
0.9
1
Figure 6.3: Step response (0.1 rad/s) of closed azimuth gyro loop for different
controllers.
0.12
0.1
Angular velocity (rad/s)
0.08
0.06
0.04
0.02
Reference
Ziegler−Nichols with anti−windup
AMIGO with anti−windup
0
−0.02
0
0.1
0.2
0.3
0.4
0.5
time (s)
0.6
0.7
0.8
0.9
1
Figure 6.4: Step response (0.1 rad/s) of closed elevation gyro loop for different controllers.
CHAPTER 6. SIMULATION RESULTS
75
−3
0.12
14
Ziegler−Nichols with anti−windup
AMIGO with anti−windup
Ziegler−Nichols with anti−windup
AMIGO with anti−windup
12
0.08
10
0.06
8
Angle (rad)
Angular velocity (rad/s)
0.1
x 10
0.04
0.02
6
4
0
2
−0.02
0
−0.04
0.8
1
1.2
1.4
time (s)
1.6
1.8
−2
2
0
0.5
1
1.5
time (s)
2
2.5
3
Figure 6.5: Azimuth gyro loop responce to a 20 Nm torque step disturbance.
−3
0.05
6
Ziegler−Nichols with anti−windup
AMIGO with anti−windup
Ziegler−Nichols with anti−windup
AMIGO with anti−windup
5
4
0.03
Angle (rad)
Angular velocity (rad/s)
0.04
x 10
0.02
3
2
0.01
1
0
0
−0.01
0.8
1
1.2
1.4
time (s)
1.6
1.8
2
0
0.5
1
1.5
time (s)
2
2.5
3
Figure 6.6: Elevation gyro loop responce to a 5 Nm torque step disturbance.
It is important that the gyro can compensate well for ship movements.
Because the entire pedestal is moving together with the ship, these motions
are not detected by the resolvers. In simulations a sinusoidal disturbance
with amplitude 0.5 rad and frequency 1 rad/s is introduced like R in Figure 2.14. The gyro loop is closed and has zero reference. The results are
depicted in Figure 6.7 and 6.8.
0.1
0.015
Ziegler−Nichols with anti−windup
AMIGO with anti−windup
0.08
Ziegler−Nichols with anti−windup
AMIGO with anti−windup
0.01
0.04
0.005
0.02
Angle (rad)
Angular velocity (rad/s)
0.06
0
−0.02
0
−0.005
−0.04
−0.06
−0.01
−0.08
−0.1
0
2
4
6
time (s)
8
10
−0.015
0
2
4
6
8
10
time (s)
Figure 6.7: Azimuth gyro loop suppression of a sinusoidal angle disturbance
with amplitude 0.5 rad and frequency 1 rad/s.
Just like the case with wind disturbances, the Ziegler-Nichols tuned controller outperforms the one tuned with the AMIGO rules when it comes to
ship movements. How well the movements are suppressed is strongly con-
CHAPTER 6. SIMULATION RESULTS
76
−3
x 10
Ziegler−Nichols with anti−windup
AMIGO with anti−windup
0.06
Ziegler−Nichols with anti−windup
AMIGO with anti−windup
8
6
0.04
Angle (rad)
Angular velocity (rad/s)
4
0.02
0
2
0
−2
−0.02
−4
−0.04
−6
−0.06
−8
0
1
2
3
4
5
time (s)
6
7
8
9
10
0
1
2
3
4
5
time (s)
6
7
8
9
10
Figure 6.8: Elevation gyro loop suppression of a sinusoidal angle disturbance
with amplitude 0.5 rad and frequency 1 rad/s.
nected to the torque step results. Without friction torque the gyro loop can
suppress the movements by a factor of almost 7000 with the Ziegler-Nichols
controller and 1000 with the AMIGO controller. This is because of the high
open loop gain at the low frequencies of the disturbance. When the direction
of movements changes the friction torque will rapidly change, thus acting
as a step disturbance. This will generate transients with high frequency
content causing the spikes seen in the gyro signal.
Chapter 7
Conclusions
The proposed automatic identification methods seem to give a very fast and
accurate estimate of the system behavior assuming there are no resonances.
The frequency response analyzer measurements can identify the resonances
but due to nonlinearities like friction torque and saturations, the result may
be distorted. Because there are no detected resonances in EOS-500 the
automatic identification seem to be a good replacement for the frequency
response analyzer measurements based on simulation results.
Ziegler-Nichols tuning gives a higher bandwidth than AMIGO tuning
but the stability margins may be too small. A combination between the
two designs would probably be the best tradeoff. This must however be
evaluated based on how well the tuning works on the real system.
The limiting factors of achievable control performance are friction torque,
limited control signals and the time delay. A rule of thumb is that the
achievable closed loop bandwidth for a system with a time delay (T ) is
limited to 1/T rad/s [8]. With Ziegler-Nichols the bandwidth is close to
the limit. To get better suppression of movement disturbances with a linear
controller the delay has to be reduced.
7.1
Proposals for system modifications
To enable higher performance a number of modifications could be performed.
The friction torque is very high compared to the available torque from
the motors. If the friction torque could be reduced, the reference following
and the disturbance suppression would be better. Reduced friction torque
would also require less torque from the motors, thus extending their life
time.
The available torque could easily be increased by increasing the power
supply voltage. This can only be made to the extent that the motor peak
77
CHAPTER 7. CONCLUSIONS
78
current does not get exceeded. The advantages must though be weighted
against the effects on motor wear.
One of the main limiting factors is the time delay. If it could be reduced
a more aggressive controller could be used. This would probably require a
major redesign of the servo architecture.
The current feedback gain (Kj ) in the motor control cards (TR-Driv)
needs to be adjusted so that the PWM does not saturate and the entire
control signal can be used. This does not seem to be the case in elevation.
The saturation of the gyro signal at ±2.6 rad/s caused by the AD converter seem to be a poor balance. The quantizer resolution is very high
compared to the signal noise so the limit could be extended to make sure
that no saturation will occur without loosing valuable information. If the
gyro signal saturate, feedback is lost and this not desirable.
7.2
Future work
The natural next step is to try the auto-tuning procedure on the real system.
The simulations indicate good results but this is no guarantee that this will
be the case in reality.
If model errors or resonances cause bad performance the tuning may
need to be complemented by methods to deal with those problems.
To make deeper investigations a more detailed model would be needed. It
would require more measurements on the system and preferable measuring of
internal states. If measuring of internal states could be available in control,
performance could probably be increased. If there for example were a way
for the controller to know when TR-Driv is saturated it could be used for
Anti-Windup or even more advanced supervising features that could enable
better performance.
Since one of the largest problems is to suppress disturbances caused by
friction torque the first measure should be to decrease the friction torque
it self. Better performance could probably also be achieved with a more
advanced, adaptive friction torque compensation.
Before any further control design work, some of the proposed system
modifications should be considered.
Bibliography
[1] Karl J. Åström, Tore Hägglund Advanced PID Control, Instrumentation, Systems, and Automation Society (2006)
[2] Karl J. Åström, Björn Wittenmark Adaptive Control, Second Edition,
Addison-Wesley (1995)
[3] Karl J. Åström, Björn Wittenmark Computer-Controlled Systems,
Prentice Hall (1997)
[4] Padmaraja Yedamale Brushless DC (BLDC) Motor Fundamentals, Microchip Technology Inc. (2003)
[5] H. Olsson, K.J Åström, C. Canudas de Wit, M. Gäfvert, P. Lischinsky
Friction Models and Friction Compensation, (1997)
[6] Monson H. Hayes Statistical Digital Signal Processing and Modeling,
John Wiley & Sons, Inc. (1996)
[7] Hassan K. Khalil Nonlinear Systems, Third Edition, Prentice Hall
(2002)
[8] Mikael Johansson Lecture notes in Control Theory and Practice, (2008)
[9] L. Råde, B. Westergren Mathematics Handbook for Science and Engineering, Studentlitteratur (2004)
[10] T. Glad, L. Ljung Reglerteknik, Grundläggande teori, Studentlitteratur
(2006)
[11] T. Glad, L. Ljung Reglerteori, Flervariabla och olinjära metoder, Studentlitteratur (2003)
[12] Jun Chen, Michael C. Hui, Y. L. Xu A comparative study of stationary
and non-stationary wind models using field measurements, Springer
(2005)
79
Appendix A
Extract from motor data
sheets
Resistance (R)
Inductance (L)
Back-EMF constant (Kb )
Torque sensitivity (Kt )
Peak current (Ip )
Value
5.25
14
7.6
6.6
16.5
Tolerance
±10%
±30%
±10%
±10%
−
unit
Ω
mH
V /rad/s
N m/A
A
Table A.1: Azimuth motor data.
Resistance (R)
Inductance (L)
Back-EMF constant (Kb )
Torque sensitivity (Kt )
Peak current (Ip )
Value
32
66
13
13
3.125
Tolerance
±12, 5%
±30%
±10%
±10%
−
unit
Ω
mH
V /rad/s
N m/A
A
Table A.2: Elevation motor data.
80
Appendix B
Optimal weighting of AWGN
signals
Given measurements of the same signal that has passed through different
AWGN (Additive white Gaussian noise) channels variance can be reduced
by weighted averaging.
Given two measured values:
x̃1 (n) = x(n) + W1 (n)
(B.1)
x̃2 (n) = x(n) + W2 (n)
(B.2)
Where x(n) is the real value and W1 (n), W2 (n) are uncorrelated widesense stationary processes given by:
W1 (n) ∼ N (0, σ12 )
(B.3)
rW1 (k) = σ12 δ(k)
(B.4)
W2 (n) ∼ N (0, σ22 )
(B.5)
rW2 (k) = σ22 δ(k)
(B.6)
The approximation of x(n) based on the two measurements is given by:
x̂(n) =
a · x̃1 (n) + b · x̃1 (n)
a+b
81
(B.7)
APPENDIX B. OPTIMAL WEIGHTING OF AWGN SIGNALS
82
The stochastic variables X, Y and Z are introduced:
X = x̃1 (n)
(B.8)
Y = x̃2 (n)
a·X +b·Y
b
X +γ·Y
Z = x̂(n) =
= γ=
=
a+b
a
1+γ
(B.9)
(B.10)
E[X] = x(n),
V ar[X] = σ12
(B.11)
E[Y ] = x(n),
V ar[Y ] = σ22
(B.12)
E[Z] =
1
(E[X] + γE[Y ]) = x(n)
1+γ
(B.13)
i
h
V ar[Z] = E (Z − E(Z))2 = E Z 2 − 2ZE[Z] + E[Z]2
1
E
(1+γ)2
= E Z 2 − x2 (n) =
=
σ12 +γ 2 σ22
(1+γ)2
X 2 + 2γXY + γ 2 Y 2 − x2 (n)
(B.14)
The value of γ that minimizes the variance of Z can be choosen by solving the optimization problem:
min
γ
V ar[Z]
(B.15)
Solution to B.15:
Extreme point:
2γσ22 − 2σ12
d
V ar[Z] =
=0⇒
dγ
(1 + γ)3
γ=
(B.16)
σ12
σ22
(B.17)
Proof of minimum:
d
V ar[Z] σ12 = dγ
γ= 2 +ǫ
σ
2
2ǫσ22
1+
σ12
σ22
+ǫ
3
(
> 0, ǫ > 0
< 0, −1 −
σ12
σ22
<ǫ<0
(B.18)
APPENDIX B. OPTIMAL WEIGHTING OF AWGN SIGNALS
γ=
b
=
a
σ12
σ22
⇒
a = σ22
83
(B.19)
b = σ12
By using the optimal weighting in (B.19) the variance is reduced to:
V ar[Z] =
σ12 σ22
σ12 + σ22
(B.20)
Appendix C
Transfer of torque over a
non-stiff axle
When torque from a motor is transferred through an axle to accelerate
a mass the axle will twist. The system can be modeled as two masses
connected by a spring and a damper as depicted in Figure C.1.
k
1
!1
J2
J1
2
b
Figure C.1: Model of a non-stiff axel.
The first mass is the rotor of the motor with a moment of inertia of J1 .
The second mass is the object that is to be accelerated with a moment of
inertia of J2 . The object is to control the angular velocity of the second
mass (ω2 ) with the torque from the motor (τ1 ). To get a Laplace transfer
function of the system with τ1 as input and ω2 as output the bond graph in
Figure C.2 is used.
84
APPENDIX C. TRANSFER OF TORQUE OVER A NON-STIFF AXLE85
I : J1
!1
2
Se
1
s1
!1
3
"!
C:
1
k
3
p1
!1
4
"!
!2
I : J2
3
s2
5
R:b
"!
Figure C.2: Bond graph of the non-stiff axle.
The relations derived from each point in the bond graph are derived below.
s1 :
τ1 = τ2 + τ3
Z t
1
τ2 dt
ω1 =
J1
(C.1a)
(C.1b)
p1 :
ω1 = ω2 + ∆ω
Z t
1
τ3 dt
ω2 =
J2
(C.2a)
(C.2b)
τ3 = τ4 + τ5
(C.3a)
τ5 = b · ∆ω
(C.3b)
s2 :
τ̇4 = k · ∆ω
(C.3c)
The above relations can be combined to the transfer function from τ1 to
ω2 in (C.4).
!
1
1
bs + k
(C.4)
J2 2
J1 + J2 s JJ1+J
s
+
bs
+
k
1
2