DSP in Loudspeakers
advertisement

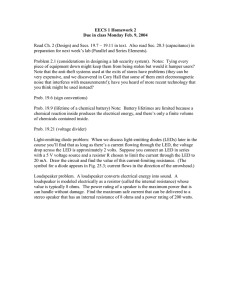
DSPinLoudspeakersADS.qxd 2/6/08 3:33 PM Page 1 DSP in Loudspeakers By Francis Rumsey Staff Technical Writer igital signal processing is used increasingly in loudspeakers to compensate for a range of linear and nonlinear distortion processes that typically arise. DSP can also be used in crossover design and for controlling the spatial radiation characteristics of loudspeakers or loudspeaker arrays. This requires the detailed understanding and modeling of the acoustical deficiencies and behavior of transducers and cabinets. In this article we summarize a number of papers describing recent research in this field; they were all presented at the AES 32nd International Conference, held in Denmark in September 2007. D ACOUSTIC AND TRANSDUCER CONSIDERATIONS FOR DSP LOUDSPEAKERS Marshall Buck, in the paper “Acoustic and Transducer Considerations for DSP Loudspeakers,” describes the frequency response of a loudspeaker as the single most important parameter related to reproduction quality and the one most susceptible to treatment using DSP. He points out that by using DSP a loudspeaker can be given a peak deviation in its frequency response of less than 1 dB on axis. But how flat does it need to be before it is audibly perfect? Referring to the work of Toole and Olive, he suggests that a resonant peak of less than 0.5 dB can in fact be audible if it is relatively broad. There are a number of distortion processes that can affect the response by a number of decibels when designing a DSP loudspeaker. Buck explains that the resonances and band limitation of loudspeaker drivers can be relatively easily addressed with DSP, but that the more problematic distortions arise from cabinet resonances, thermal effects, directional variation, power compres- sion, limiting, and protection. He suggests some approaches to transducer selection and cabinet design that may help to overcome these problems. For example, the use of a metal diaphragm can help to minimize the effects of heat induced stiffness change. However, such a diaphragm can have a very considerable peak in its response in the stop band (see Fig. 1), which can be controlled by using a digital crossover with a high order (at least 8th order). He also shows that response smoothing in measurement (such as 1/20th octave) gives a good idea of the octave-to-octave balance in the frequency response and suggests that a flat response in this analysis may be sufficient to deliver a perceptually perfect performance, making further smoothing using DSP unnecessary. In other words, flattening every minute detail in a loudspeaker’s response may not be needed for perceptually high sound quality. Buck concludes with the view that one may be tempted to use DSP to artificially flatten the response of an otherwise mediocre loudspeaker, but this may be only part of the picture, leaving other sources of error uncontrolled. MODELING LOUDSPEAKER NONLINEARITIES Finn Agerkvist, in his AES 32nd paper of this title, discusses the different nonlinear processes that take place in loudspeakers and looks at different ways of simulating and compensating for them using signal processing. ➥ File: C:\MLS\ADATA\ZIPA\SEAS\012-01.FRQ 11-2-2000 11:18 AM Transfer Function Magnitude - dB SPL/volts 94.0 92.0 90.0 88.0 86.0 84.0 82.0 80.0 78.0 76.0 74.0 auto 125 250 500 1K 2K 4K 8K 16K IEC Standard Frequencies - Hz Message: Seas Magnesium Cone Woofer 60 Degrees F vs. 76 Degrees F Fig. 1. Response of magnesium cone woofer showing two different temperatures (solid and dotted lines), illustrating the peak in the response and the very small difference in temperature behavior (courtesy Buck). J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February 65 DSPinLoudspeakersADS.qxd 2/6/08 3:33 PM Page 2 DSP in Loudspeakers Fig. 2. Three main loudspeaker driver nonlinearities plotted with respect to different input power levels. A fourth, shown bottom right, is the derivative of the inductance. These plots are for a 5-inch woofer (courtesy Agerkvist). He explains that it is generally accepted that three factors are of primary importance in determining loudspeaker driver nonlinearity: the force factor, Bl (the magnetic field strength times the length of the voice coil); the voice coil inductance, Le; and the suspension compliance, C m . Using a system developed by Klippel (see below), Agerkvist is able to plot the changes in these parameters at different power levels, as shown in Fig. 2. In this example the largest change is observed in the driver’s compliance, which increases overall with power level but also changes shape to some extent. Agerkvist points out that it is difficult to test nonlinearities such as these because it requires that the loudspeaker is driven at very high power levels, which can run the risk of destroying the drive unit. For this reason it is desirable to have curve fitting techniques that extrapolate well to levels that might be unsafe for physical testing. 66 One of the problems with high-order polynomial expansions for curve fitting in these cases is that they tend to deviate from the physical behavior of real loudspeakers, so it is important to have a good knowledge of how loudspeakers really behave in order that such oddities can be spotted. One example is given, based on the knowledge that Bl is usually maximum when the cone is at rest and drops off rather fast once the magnet gap is not filled with the coil. For this reason it may be desirable to fit the expansion to the inverse of the Bl curve or to use a set of localized Gaussian expansion functions that can be summed together. This also seems to work quite well for fitting the compliance curve. For fitting the inductance curve one needs a function that has a negative slope around zero and stable values for extreme positive and negative conditions, for example. One possibility here is to use the sigmoid function, because the standard polynomial expansion does not seem to be particularly suitable. It was found that one way of measuring the compliance for the purposes of modeling is to look at the dissipated power. This is because it is understood that any heating of the voice coil will spread to the spider (the flexible device that holds the cone in its correct suspended place), and any heating of this suspension is likely to affect its flexibility. However, when modeling distortion profiles of modeled and real units, the simulations did not match perfectly and it was suggested that other factors might also be important, such as the rms velocity and/or displacement of the suspension. The best prediction using power dissipation data was found at high power levels, where presumably the voice coil heating had a more substantial effect on the spider compliance, but at lower levels the prediction was less satisfactory. In his paper “Optimal Design of J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February DSPinLoudspeakersADS.qxd 2/6/08 3:33 PM Page 3 DSP in Loudspeakers Fig. 3. Adaptive nonlinear control of a loudspeaker (Figs. 3–6 courtesy Klippel) Fig. 4. Force factor Bl(x) and Stiffness Kms(x) versus voice coil displacement of loudspeaker under test Loudspeakers with Nonlinear Control,” Klippel discusses the practical benefits of such technology. The general structure of an adaptive nonlinear control system for a loudspeaker is shown in Fig. 3. A detector is used to measure the loudspeaker parameters by looking at the voltage and current characteristics of electrical signals at the loudspeaker terminal. These are diagnosed and used to control a preprocessing system that treats the signal fed to the loudspeaker appropriately. Apparently it is possible to do this diagnosis using any ordinary audio signal having sufficient bandwidth and J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February amplitude (for further discussion of this matter see a summary of the paper by Pedersen and Rubak, below). During the initial identification of those parameters the working range of the driver is determined. Klippel shows an interesting example (Fig. 4) in which the stiffness of a particular ➥ 67 DSPinLoudspeakersADS.qxd 2/6/08 3:33 PM Page 4 DSP in Loudspeakers A B Fig. 5. (A) Positive and negative displacement values of an example driver with single tones varied in frequency and voltage. (B) Equivalent reduction in level of fundamental tone due to this compression effect. 5-inch automotive audio driver is asymmetrical: negative displacement produces a higher restoring force than positive displacement. One of the difficulties of dealing with a phenomenon like this using DSP for correction is that the system may attempt to correct for such asymmetry by producing a DC displacement of the voice coil, which moves it away from the Bl maximum thereby introducing intermodulation distortion. Klippel shows that voice coil displacement is an interesting phenomenon to study, as illustrated in the example in Fig. 5A. The voice coil displacement is shown on the y axis against the frequency of a single tone on the x axis for a number of equally spaced voltage levels. However, although the voltages are equally spaced, the displacement values are not, suggesting that the loudspeaker becomes less sensitive at higher signal levels and exhibits a certain dynamic compression, as shown in Fig. 5B. A most interesting point is that if one observes the probability distribution function (PDF) of voice coil displacement for music signals, as shown in Fig. 6, the voice coil spends the majority of its time at zero and relatively little at the extremes; whereas for a sine tone the opposite is true. He Fig. 6. Probability distribution functions of cone displacement for music and a 50-Hz sine tone 68 suggests that the heating of the voice coil in such a case for typical music signals is of little concern, whereas in the case of sustained tones it can’t be neglected. Generally there are two distortion systems at work in parallel: a linear system that acts as a second- or higherorder high-pass filter obeying traditional Thiele-Small parameters, and a nonlinear system that comes into play more at higher amplitudes of cone displacement. In the latter case, Klippel explains, when the nonlinear control feedback loop comes into play there can be some unusual effects because the distortion components affect their own generation process. He concludes his paper by making the important point that one should concentrate the design of the passive driver in areas that cannot be corrected, such as vibration of the cone or mechanism, directivity, size/weight, cost of manufacture, and efficiency. IDENTIFYING LINEAR LOUDSPEAKER PARAMETERS In their paper “Musical TransducerLess Identification of Linear Loudspeaker Parameters” Pedersen and Rubak explain that linear loudspeaker parameters such as resonance frequency, damping factor, and voice coil resistance can drift over time more substantially than nonlinear parameters such as force factor, compliance, and voice coil inductance as a function of coil position. They drift as a result J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February DSPinLoudspeakersADS.qxd 2/6/08 3:33 PM Page 5 DSP in Loudspeakers Fig. 7. General structure of an FIR system identification with a loudspeaker. The error signal: e(n) = d(n) – y(n)); d(n) is the desired response, loudspeaker current; y(n) is the output of the FIR filter (courtesy Pedersen and Rubak). of temperature, humidity, aging, and production spread. In order to identify both linear and nonlinear parameters, a process known as system identification is employed, whereby the loudspeaker voltage and current are used to measure the current state of the driver. As music is often the main signal used to drive the loudspeaker, they tried an approach that uses music as the identification test signal. (System identification in general is a process of mathematical analysis that aims to model dynamic systems on the basis of measured input–output data.) As shown in Fig. 7, an adaptive FIR (finite impulse response) filter is used to match the loudspeaker parameters in order that the least mean square of the error signal is minimized. The authors explain that the length of the FIR filter should be selected so that the truncation error will be sufficiently low—this also determines the frequency resolution of the filter. When greater accuracy is needed, the frequency range of the identification process can be limited, for example to frequencies only a little above the bass resonance frequency. Data to describe the loudspeaker can come either from a measurement or a model. The authors show examples based on two Simulink models, one linear and the other nonlinear, of a 6.5-inch bass/mid-range loudspeaker unit. First the filter was optimized using the linear model with white noise as a test signal. A process of trial and error was used to choose the best resolution for the process, leading to a sampling frequency of 4 kHz and a filter length of M=200. This was done to avoid the possibility of one particular frequency component of a musical signal having an undue J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February influence on the outcome. The estimates of driver resonant frequency and voice coil resistance both turned out to be very close to those of the real driver, with an error of around one percent or less, whereas the damping factor was slightly less well predicted, with an error of nearly six percent. The last parameter was believed to be in error because of an over-simplified fitting function for the damping factor. Subsequently, the authors compared the results from their model using white noise with those derived from a music signal. As far as the resonance frequency results were concerned, the results were similar to those obtained with white noise but the dampingfactor results had a higher spread at different loudspeaker input levels. They suggest that the voice coil resistance is more difficult to estimate with music because it rarely has substantial energy below 20 Hz. This can be dealt with by employing a small DC offset in the test signal, which can provide the necessary information. In discussing the prediction and modeling of nonlinear loudspeaker parameters toward the end of their ➥ 69 DSPinLoudspeakersADS.qxd 2/6/08 3:33 PM Page 6 DSP in Loudspeakers on an FIR filter was found to be effective for identification of some loudspeaker parameters when one is dealing with small cone displacements. Fig. 8. Topology of a biquad IIR filter in direct form I, with optional error feedback (EFB). The graph shows the self-generated noise of such a filter when using singleand double-precision (48 bit) processing (Figs. 8 and 9 courtesy Thaden et al.). paper, the authors note that a simple model of compliance based only on a function of the cone position seems to be insufficient. Also they note that system identification can sometimes come up with the wrong parameters, particularly if the test signal is not suitable for the algorithm concerned. The design of such things needs to take into account signal-to-noise ratio, clipping, and displacement of the loudspeaker. A system-identification model based Fig. 9. Simplified principle of complex EQ FIR filter coefficient generation for a midrange loudspeaker. (1) Measured loudspeaker response is (2) inverted to form a compensation response, which is combined (3) with the crossover filter characteristic to lead to a target response for the FIR filter. An inverse FFT process (4) is used to create a time domain response that can be turned into a suitable FIR filter. 70 DSP-BASED LOUDSPEAKER MANAGEMENT SYSTEM In another AES 32nd Conference paper, Thaden et al. describe a loudspeaker management system based on signal processing, comparing the relative merits of IIR (infinite impulse response) and FIR filters. IIR filters are like conventional analog filters, they explain, with their built-in nonminimum phase response and other typical “analog” characteristics. However, they are simple to implement and most typical filter characteristics (such as high-pass, low-pass with Butterworth, Bessel, or Linkwitz-Riley forms) can be built from IIR building blocks based on biquad filters, as shown in Fig. 8. Such filters can be used for both crossover design and equalization of loudspeakers, and higher-order filters can be built by simply cascading biquads. However, the authors also point out that the noise and distortion performance of IIR filters can be poorer than that of FIR filters because of the feedback loops involved, particularly when using fixed-point processing. The authors suggest that 48-point data and arithmetic paths provide a good dynamic range, whereas it is only necessary to use 24-bit precision for the filter coefficients. They found that 48-bit integer processing (fixed point) produced considerably less noise and distortion than 32-bit floating point processing for medium and high signal levels. The advantages of FIR filters lie in the possibility for creating filters with a much wider range of phase characteristics, as well as the chance of making one FIR filter that can replace a whole chain of IIR filters. While it is indeed possible to combine both types of filter in one design, it is apparently more common to employ a one-FIR-filterdoes-it-all approach. In this way one can design an FIR filter that deals with the equalization and crossover functions together. One of the advantages of using linear-phase FIR filters for crossovers is that they can be designed J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February DSPinLoudspeakersADS.qxd 2/6/08 3:33 PM Page 7 DSP in Loudspeakers process for generating the appropriate coefficients for equalizing and crossing over a typical loudspeaker are shown in Fig. 9. Fig. 10. Conventional, left, and pairwise symmetric three-way loudspeaker, right, (Figs. 10 and 11 courtesy Horbach and Keele) to avoid any of the problematic cancellations and dips in the frequency response that can otherwise arise in the crossover range. One problem with FIR filter design is that the processing power required to implement complex filters across the entire audio frequency range is considerable. This is because the length and number of coefficients of an FIR filter that are needed to get good frequency selectivity are proportional to the frequency. For this reason different bands tend to be operated at different sampling frequencies, resulting in a multirate filter design. One of the side effects of multirate filtering is that different frequency bands end up having different group delays; also the signal-to-noise ratio becomes worse as the sampling rate drops. The typical Fig. 11. Approximation of a crossover filter using an FIR filter J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February DIGITAL CROSSOVER FILTERS In two AES 32nd papers dealing with the application of linear digital crossover filters to pair-wise symmetric multiway loudspeakers, Horbach and Keele consider both the control of off-axis frequency response and beamwidth or polar pattern of the loudspeaker. They start by pointing out that it is desirable to have a loudspeaker with a uniform and smooth off-axis response, as this is a feature that is widely accepted as giving rise to high-quality sound. There are various ways of attempting to achieve this, including the use of a large number of drive units in a long curved array, but these are not always practical and have various drawbacks. Quite commonly engineers will modify the parameters of multiway crossovers in an attempt to “voice” a loudspeaker for optimum perceived sound quality. An alternative, proposed by Horbach and Keele, is to use a DSP-based crossover with a loudspeaker array that has a single central tweeter and pairs of lower-frequency units arranged on either side, as shown in Fig. 10. The idea is that only one or two pairs of speakers are operating at a time, although the single central tweeter operates on its own, which allows the method to be applied to both equally and nonequally spaced drivers. The aim is to specify a crossover response shape that forces a flat response at an arbitrary off-axis angle. The authors found that if this is done the response at other off-axis angles is also reasonably flat. The bandpass crossover filter the authors arrived at through their process of development, considered by examining primarily the far-field response of the loudspeaker, tends to have a shape like that shown in Fig. 11. It has an unusual pointed-top shape that rolls off very steeply to either side of a socalled critical frequency at which only one pair of drivers is energized. The spacing of the speakers and the crossover frequencies are related so that the spacing is a constant ➥ 71 DSPinLoudspeakersADS.qxd 2/6/08 3:33 PM Page 8 DSP in Loudspeakers THE P ROC E EDINGNDS OF THE AES 32 ND IN T E R NATIONA L C ONFERE NCE DSP for LOUDSPEAKERS DSP for Loudspeakers is now more relevant than ever. This is effectively demonstrated by these 21 scientific papers, which describe how digital signal processing really can make the difference in loudspeaker design and usage. The proceedings hold 235 pages of state-of-the-art technology in this important research field. Purchase online at www.aes.org/publications/conf.cfm Also available as a downloadable PDF (11.3 MB). INnGd S D E OCEES 32 R P THEF THE ATIONAL O ERNA NCE INT NFERE CO 23 21– ber ptem e S 7 200 For more information email Donna Vivero at DMV@aes.org or call +1 212 661 8528, ext. 42 Hill Co n 72 erø nc fere nh ope d, C e Ch air: Jan age n, D ldg Abi enm ark aard Pe d erse n distance apart in terms of the acoustic wavelength at the critical frequency of the crossover. The filter heavily attenuates the signal at frequencies above and below the critical frequencies of adjacent drivers. Between the critical frequencies only two pairs of speakers operate. One of the beneficial side effects of this design is that the vertical polar pattern is also maintained relatively consistently over the frequency ranges of different drivers, so that the pattern when only one pair of sources is active is relatively similar to that which arises between the critical frequencies when more than one pair is active. It is suggested that the spacings of the drivers at their critical frequencies should be in the range of 0.4 to 0.6 of one wavelength in order to achieve this. A spacing of 0.5 wavelength is near optimum and gives a polar pattern with no side lobes and a vertical beam width of around 84 degrees. The authors found that simplifying the design technique, so as to restrict the flattened off-axis response to the 6-dB-down level compared with on axis, defined the beamwidth, and that forcing the 6-dBdown off-axis frequency response to be flat forced the beamwidth to be constant in the same frequency region. SUMMARY Based on the summary of these papers, it can be seen that there is considerable potential these days to compensate for both linear and nonlinear characteristics of loudspeakers by using digital signal processing. One might be able to employ drive units previously considered unusable or inappropriate and use signal processing to make the resulting sound more acceptable. The relative costs of improving drive units and of signal processing are beginning to reach the point where it may be more economical to employ signal processing than to improve the mechanics or acoustics of the physical loudspeaker, although there are still things that cannot be adequately dealt with using signal processing. Such techniques may lead to the possibility for more compact transducers that have previously unheard of sonic performance, although the laws of physics naturally still limit what can be achieved in this way. J. Audio Eng. Soc., Vol. 56, No. 1/2, 2008 January/February