An experimental study of power systems
advertisement

Scholars' Mine
Masters Theses
Student Research & Creative Works
1972
An experimental study of power systems
Nguyen Quang Duoc
Follow this and additional works at: http://scholarsmine.mst.edu/masters_theses
Part of the Electrical and Computer Engineering Commons
Department:
Recommended Citation
Duoc, Nguyen Quang, "An experimental study of power systems" (1972). Masters Theses. Paper 3496.
This Thesis - Open Access is brought to you for free and open access by Scholars' Mine. It has been accepted for inclusion in Masters Theses by an
authorized administrator of Scholars' Mine. This work is protected by U. S. Copyright Law. Unauthorized use including reproduction for redistribution
requires the permission of the copyright holder. For more information, please contact scholarsmine@mst.edu.
AN EXPERIMENTAL STUDY OF POWER SYSTEMS
BY
NGUYEN QUANG DUOC, 1939A THESIS
Presented to the Faculty of the Graduate School of the
UNIVERSITY OF MISSOURI-ROLLA
In Partial Fulfillment of the Requirements for the Degree
MASTER OF SCIENCE IN ELECTRICAL ENGINEERING
1972
T2873
74 pages
c.l
Approved by
ii
ABSTRACT
For three phase AC power systems consisting of synchronous
machines interconnected by transmission lines and other electrical
transmission equipment, the power transmitted and the stability of
the system depend upon the constants of synchronous machine and
the characteristics of the transmission lines.
The purpose of
this work is to design and set up a model of a power system in
the laboratory, measure the constants of synchronous machines,
the power angles and power flows of the system.
An investigation
of the effects of the saturated machines is based upon the
laboratory data.
This work is intended primarily as a tool for studying
Power Systems in a University Laboratory.
It makes possible the
study of electrical power systems imparting a better physical
understanding to the student and improves his consequent learning.
iii
ACKNOWLEDGEMENTS
The author would like to express his sincere gratitude to his
advisor Dr. John Derald Morgan for advice, guidance and encouragement
during the course of this work.
The author is also grateful to the Agency for International
Development for the financial support which he received.
The author
wished to thank Mr. Frank B. Huskey for the help he has given in
the laboratory.
Finally, the author wishes to thank his family and especially
his wife, Dao Thi Thu Cue, for their continued encouragement and
moral support during his studies.
iv
TABLE OF CONTENTS
Page
ABSTRACT......................................................
ii
ACK:N'0WLEDGEJI.1ENT. • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • i i i
LIST OF ILLUSTRATIONS • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •
v
LIST OF TABLES. • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • . • • • • • • . • • • • • • • • • vii
I.
INTRODUCTION •••••••••••••••••••••••••••••••••••••••••••
1
II.
THEORETICAL CONSIDERATION IN .HODELING OF POWER SYSTEHS.
7
III.
A.
Transmission System. . • . . . . . . . . . . . . . . . . . . . . . . . . . .
7
B.
Measurement of Synchronous Machine Reactances ...
16
c.
calculation of Power Angle and Power Angle
Characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
EXPERIMENTAL RESULTS ••••••••••••••••••••• • •• • ••••• • ••••
40
A.
Measurement of Machine Constants . • . . . . . . . • . . . . . .
40
B.
Measurement of Power Angle .•.•.•.••..•..•......•
42
CONCLUSION •••••••••••••••••••••••••••••••••••••••••••••
51
BIBLIOGRAPiiY ••• • •• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •
53
VITA •••••••• • •• • •• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •
54
APPENDICES •• • •• • •• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •• • •
55
A.
Laboratory Data of Machine A......•.......•......
55
B.
Sample Calculation . . . . . • . . . . . . • . . . • . . . . . . . • . . . . . .
60
rv.
v
LIST OF ILLUSTRATIONS
Figures
Page
I.l.
Synchronous Machine Equivalent Circuit...............
1
I.2.
Two Machine Power System.............................
2
I.3.
Two Machine System Equivalent Circuit................
2
I.4.
Phasor Diagram of Two Machine System.................
3
I.S.
Representation of Synchronous Machine in a
Transient Stability Study............................
5
Equivalent ~ Circuit for Representing Transmission
Line. • . • • . . . • . . • . . • . . . • . . . . . . . • • . . . . . . . . . . . . . . • . . . . . .
11
II. 2 .
Impedance Circuit. . . • . • . . . • . . . • . . . . . . . • . . . • . • . • . . . . . .
11
II. 3.
Multi -layer Coil. • • . . • . . . • . . . . . . . . . • . . • . . . • . . • • . . . • . .
13
II.4.
Dimension of the Reactance Coil in CM ••...•.•.••.....
14
II.Sa.
Open Circuit and Short Circuit Characteristics for
Determination of xd by AIEE Definition •.......•......
17
Open Circuit and Short Circuit Characteristics •.•.•..
for Defining xd......................................
18
II.6.
Open Circuit and Short Circuit Characteristics .......
19
II.7.
Open Circuit Characteristic Defining the
Saturation Factor. . • . • . • . • . . . . . • . . • . . . . . . . . . . . • . . . • . .
19
II.B.
Open Circuit and Zero Power Factor Characteristics ...
21
II.9.
Symmetrical Curve of Armature Short Circuit
CUrrent. • • . • . . . • . • . • . . . . . . . . . . . • . . • . . . . . . . . . . . • . . • . • •
23
II.lO.
Envelope of Symmetrical Short Circuit Current ........
23
II.ll.
current Difference Plotted to Semi-logarithmic
Paper................................................
25
II.12.
Locked Rotor Line to Line Test . . . . . . . . . . . . . . . . . . . . . . .
26
II.13.
Oscillograms of Slip Tests .......................•..•
28
II.l4.
vector Diagram of Synchronous Generator ....••..•...•.
30
II.lS.
Vector Diagram of Synchronous Generator With
Machine Resistance Neglected ••.•••••••••••••••.•...•.
32
II.l.
II.5b.
vi
List of Illustrations (continued)
Figures
Page
II.l6a.
Single Line Diagram of One Machine . . . . . . . . . . . . . . . . . . .
34
II. 16b.
Phasor Diagram of One Machine. . . . . . . . . . . . . . . . . . . . . . . .
34
II.l7a.
Single Line Diagram of One Machine and Series
Reactance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
Phasor Diagram of One Machine and Series
Reactance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
II.l8a.
Single Line Diagram of Two Machine System . . . . . . . . . . . .
37
II.l8b.
Phasor Diagram of Two Machine System . . . . . . . . . . . . . . . . .
38
III.l.
Connection Circuit Diagram of Synchronous Motor ......
42
III.2a.
Single Line Diagram of Two Machine System: One
Motor and One Generator. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
III.2b.
Connection Circuit Diagram of Two Machine System .....
44
B.l.
Determination of x and x
From Data of
Machine A . . . . . . . . . J? •••••• ~~. • • • • • • • • • • • • • • • • • • • • • • • •
59
B.2.
Equivalent Circuit of Synchronous Machine . . . . . . . . . . . .
60
B.3.
Symmetrical Short Circuit Transient Envelope . . . . . . . . .
64
B. 4.
.6-i
65
II.l7b.
X
on Semi-logarithmic Scale........................
vii
LIST OF TABLES
Table
III.l.
III.2.
III.3.
III.4.
III.5.
III.6.
A.l.
A.2.
A.3.
A.4.
Page
Comparison Between Test and Calculated Values
of Power Angle for the Unsaturated Salient
Pole Synchronous l1achine. • • • • • • • . • . . • • • • • . . . • . • • • . . . • .
45
Comparison Between Test and Calculated Values of
Power Angle for the Saturated Salient Pole
Synchronous Machine. • • • . • • . • . • . • . • • • • • . • . . . . • . • . • . • . • .
46
Comparison Between Test and Calculated Values of
Power Angle for the Unsaturated Salient Pole
Synchronous Machine Connected to an Infinite Bus
Through the Artificial Line Designed in Section II ••••
47
Comparison Between Test and Calculated Values of
Power Angle for the Saturated Salient Pole
Synchronous Machine Connected to an Infinite Bus
Through the Artificial Line Designed in Section II ••••
48
Test and Calculated Values of Power Angle for the
'I'\>lo Machine System. . . • . • . . • . . • • • . • . . . • • • • • • . . • • . . • . . • .
49
Test and Calculated Values of Power Angle for the
Two Machine System Through the Artificial Line
Designed in Section II. . . . • • . • • . • . . . . • • . . • . . . • • • . . . . • •
50
Measurement of No-Load Voltage in Function of
Field Currents. • . . • . . . • . . . • . . . . . . . . . • • . . • • . . • . . . . • . . . .
55
Measurement of Short Circuit Current in Function
of Field Currents . • . • • • . • . • . • • • . • . • . • • . • • . . . . . . • . • . . • •
56
Measurement of Terminal Voltage in Function of Field
current at Rated Armature Current and Zero Power
Factor. • • • • • • • • • • • • . • • • . • . • • • . • • • . • • • • • • • . • . • • • • • • • • • •
57
Measurement of Short Circuit Oscillogram •....••.....••
58
1
I.
INTRODUcriON
An electric power system consists of three principal components:
the generating stations, the transmission system and the distribution
system.
By means of synchronous generators, energy in its various
forms is converted into electric form and the transmission systems
are the connecting links between all the generating stations and
distribution systems which connect the individual loads.
One problem in power system analysis is the determination of
whether or not the various synchronous machines in the system will
remain in synchronism with one another.
The characteristics of the
synchronous machines and of transmission lines obviously play an
~portant
part in the problem.
In power system analysis, a synchronous machine is often
represented in a circuit diagram by a constant reactance in series
with a constant voltage.
Several synchronous machine reactances
-~-~
+
I
E
f
E /0
Figure I.l.
have been defined.
=
E
Synchronous Machine Equivalent Circuit
Which reactance is used depends upon which
conditions are desired to be investigated for the system.
2
Consider a very simple power system, consisting of two synchronous
machines A and B and series inductive reactance of the transmission
line XL.
The system is represented by the following circuit diagram.
B
Figure I.2.
Two Machine Power System
Combining the machine reactances and line reactance into a single
reactance, the circuit diagram becomes:
Figure I.3.
Two Machine System Equivalent Circuit
3
Suppose that machine A is a synchronous generator and machine B
is a synchronous motor, the power transmitted from the generator to
the motor depend upon the phase difference 8 of the two voltages EA
and
EB~
these voltages are generated by the flux of the field windings
of the machines, so their phase difference is approximately the same
as the electrical angle between the two machine rotors.
The phasor diagram of a two machine system is shown in the
figure I.4 below:
Figure I.4.
Phasor Diagram of Two Machine System
The vector equation is:
(I.l)
Hence, the current
(I.2)
since i t is assumed that there is no resistance in the line, the
power transmitted from the generator to the motor
is given by:
4
Real part of {E~I)
p
(I. 3)
Substituting the value of I given by equation I.2
{I.4)
P = Real part of [ (E*
A
E~
where
is conjugate of EA
Let
(I. 5)
(I. 6)
then
(I.7)
E*
A
We have
p
Real part of [EA j-o x
EA fj_ - EB LQ_
X
J
190
T --
or
E~
p
/-90
E AEB :.-/_-_9_0_-8_
Real part of [
Equation I.B shows that the power P varies with the sine of the
displacement angle 6 between the two rotors.
The maximum power Pm that can be transmitted in the steady state
with a given reactance XL and given internal voltages is:
5
p
m
=
(I.9)
This maximum occurs at a displacement angle 8
90°.
In practice,
this maximum is never reached.
The system is stable only if the displacement angle 8 is between
-90° and +90° where the s 1 ope dP
·
d 1s
8
· '
pos~t1ve,
·
t h at 1's t h e range 1n
which an increase in displacement angle results in an increase in
transmitted power.
P
m
is the steady state stability limit of the system.
It is the
maximum power that can be transmitted and synchronism will be lost
if an attempt is made to transmit more power than this limit.
If the
point of instability is reached by a sudden change in conditions of
operation of the system, a short-circuit for example, the limiting
value of power is called the transient stability limit.
For transient
X'
d
Figure I.S.
Representation of Synchronous Machine
in a Transient Stability Study
stability studies, the synchronous machine is represented by its directaxis transient reactance
xd
in series with a constant voltage power
1
source which is voltage behind transient reactance .
1Bibliography No. 5, PP· 259
6
The subtransient reactances of synchronous machines are used to
determine the initial current flowing on the occurrence of a short
circuit.
For the determination of the interrupting capacity of circuit
breakers, subtransient reactance is used for synchronous generators
and transient reactance is used for synchronous motors.
Tests were made in the laboratory to measure the synchronous
machine reactances.
A transmission line was built to determine the
power angle curve by tests and checked by method of analysis.
7
II.
A.
THEORETICAL CONSIDERATIONS IN MODELING OF POWER SYSTEHS
Transmission System
1.
Artificial transmission system
An artificial transmission system used for making tests in the
laboratory v1as constructed of reactance coils and operated normally
at 220 volts.
Power was obtained from the synchronous generator
11 KVA, 220 volts, 60 cycles driven hy a direct current motor.
A synchronous motor de generator set was used as load: the
direct current generator of this set was connected to a resistance
load to provide a dead load instead of loading back on the direct
current laboratory system.
The field of the direct current generator
was separately excited so that the load could be varied gradually by
raising or lowering the voltage.
The artificial transmission system was designed so that results
could be obtained in per-unit comparable with those expected in an
actual system using a 230 KV - 100 MVA base.
2.
Calculation of transmission system constants
A 230 KV transmission system of 230 mile length was selected.
Base quantities were chosen to be 230 KV and 100
l~.
Figure II-1 shows the equivalent pi circuit, using the resistance,
inductive reactance and capacitive reactance, the pi equivalent circuit
of the system was calculated.
The calculation shows the per-unit
impedance for the system in respect to the original base system in
which it was chosen and for the artificial system base is 20 KVA and
220 volts.
8
The calculations are as follows:
Base KVA·
100,000 KVA
Base KV·
=
230 KV
2
(Base KV)
x 1000
Base KVA
Base impedance
230
100
2
529 ohms .
The length of the line was selected to be 230 miles, all constants
of the lines are shown in Table 3, "Typical Transmission lines
characteristics at 60 cycles" on page 280 of Transmission and Distribution Reference book.
Resistance at S0°c
r
= 0.1288 ohms per mile
Reactance per phase
x = 0.7681 ohms per mile
Shunt capacitive reactance
x'
= 0.1821
megohms per mile
The impedances of the equivalent pi circuit are expressed in the
following form:
Zeq = 100 rSK
r
Z'eq
=
-j
2x'
s
+ jlOOxSK
(II .1)
x
(K
r
+ jk )10
4
x
where:
s =
length of line in hundreds of miles
(II. 2)
9
K
r
K
X
k
k
r
X
=
1 -
2
2S
300x'
(II.3)
1 -
2
s2
(~- r
xx')
600 x'
(II.4)
1 -
2
xs
1200x'
(II.S)
2
rs
1200x'
(II. 6)
The correction factor k
X
is never greater than about 0.005, so it
can be neglected and the shunt impedance Z'
eq
can be considered as
a pure capacitor.
From equations II.3, II.4 and II.S we get:
K
1
r
2
xs
- 300x'
2
=
0.7681 X 2.3
300 X 0.1821
0.9256
K
X
=
1 -
=
l
2
s2 X
( - - _E._)
600 x'
xx'
2. 3
- 600
= 0.9638
2
(0.7681
0.1821
-
2
0.1288
)
0.7681 X 0.1821
10
k
r
1
l
xs
2
- 1200x'
_ 0.7681
2
2.3
1200 X 0.1821
X
0.9814
The equivalent impedances of the equivalent
TI
circuit are given by
the following equations:
Zeq
Req + jXeq
= lOOS(rK
r
+ jxK)
(II.7)
x
Z'eq = -jX'eq
-j
2x'
(k )
s
r
X
10
4
Numerical substitution gives:
Zeq = 100 X 2.3(0.1288 X 0.9256 + j0.7681 X 0.9638)
(27.42 + j170.26) ohms
Z'eq
- j
2
X
4
0 1821
•
X 0.9814 X 10
2.3
-jl554 ohms
Or in per unit system:
Zeq
Z'eq
{0.052 + j0.322)p.u
2.94 p.u
(II. 8)
11
The equivalent circuit for this line is shown in Figure II.l.
Zeq
0·----r------..
'
Zeq
Figure II.l.
Equivalent n Circuit for Representing
Transmission Line
Neglecting the shunt impedance Z'eq, the equivalent circuit for
representing the transmission line is shown in Figure II.2.
Zeq
Figure II.2.
Impedance Circuit Adapted From Figure II.l
by Omitting Shunt Admittances
The base impedance of the system using 20 KVA 220 volts is:
z
Base
(0.22)
0.02
2
12
zBase
2.42 ohms .
The line impedance of the artificial system is:
3.
z
2.42(0.052 + j0.322)
z
(0.125 + j0.780) ohms •
Design of reactance coils
a.
Dimension of the coils
The impedance of the artificial line per phase is:
z = (0.152 + jO. 780) ohms
.
The inductance of the coil is
XL
L
w
X
L
L
21f f
0.780
27T X 60
= 2069 rnicrohenrys
It is impossible to calculate the true inductance of some types
of air cored coils with a fair degree of accuracy.
The actual apparent
inductance differs from the calculated true inductance because of
distributed capacitance.
For that reason, inductance calculations are
generally used only for a starting point in the final design.
reactance value of the reactor coil must be verified by test.
The
13
The inductance of the coil is given by the following formula
in which all dimensions are expressed in centimeters and inductance
is in microhenrys.
L
=
2
2
2
2
b
c
8a
b
0.01257 an [(1 + ---- + ----)loge ~ -y + ---2 Y2 ]
2
2
1
32a
96a
16a
(II.9)
where:
n:
number of turns
a:
radius of the coil measured from the axis to the center
of winding cross section
b:
the length of the coil
c:
the radial depth of winding
d:
the diagonal of the winding .
a
••I
b
c
Figure II.3.
Multi-layer Coil
14
y
1
and y
2
are functions
of~ (when b <c) or~ (when b >c).
When b and c are determined, y
1
and y
2
are obtained from the table
1
shown on page 3-19 of Radio Engineering Handbook .
After trying many numerical values in the formula II.9, the
dimensions of the coil were determined as follows:
Type of coil:
Multilayer circular coil of rectangular
cross section
Wire:
Bare diameter
2.00 mm
Maximum diameter over insulation SCCE
2.2 mm
(Single cotton covered enameled)
b.
Number of turns
Number of layers:
12
Number of turns per layer:
Total number of turns:
c.
25
12 x 25
=
300 .
Dimension of the coil
Diameter of the coil:
Length of the coil:
D
b
=
15 em
6.6 em
2.6
6.6
15
Figure II.4.
Dimension of the Reactance Coil in em
1 Refer to Bibliography No. 1
15
The radial depth of winding c = 2.6 em
Radius of the coil measured from the axis to the
center of the winding:
a
=D
a
=
-
c
2
15 - 2.6
2
Diagonal of the coil:
I
Y6.6
2
+ 2.6
2
7.09 em .
The ratio~ equals:
c
b
=
2.6
6.6
0.393
c
The ratio b equals 0.393, from the table we get:
0.7645
y2 = 0.242 .
Substituting these values in equation II.9 we have:
L
2034 microhenrys ,
or, the reactance:
16
XL
0.7668 ohms .
This value was verified by a direct measurement.
The impedance of the reactance core given by the
measurement is
Z
(0.10 + j0.76)ohms
This value is sufficiently close to the impedance
of the artificial line to be designed (0.125 +
j0.78 ohms) and shall be used for all further
calculations.
B.
Measurement of Synchronous Machine Reactances
1.
Direct axis reactances
a.
Direct axis synchronous reactance xd
a-1.
Unsaturated direct axis reactance
The definition of unsaturated direct axis synchronous reactance
given in AIEE standard is as follows:
Synchronous reactance is the
ratio of the field current required to circulate rated current on a
sustained three phase short circuit to the field current which would
produce rated voltage at no load if there were no saturation.
Figure II.Sa shows the open circuit characteristic (OCC) and short
circuit characteristic (SCC) and the AIEE definition gives:
(II.lO)
17
Air gap line
Rated voltage
i
Figure II.Sa.
i
s
s
Open Circuit and Short Circuit Characteristics
for Determination of xd by AIEE Definition
is the field current required to circulate a rated three phase
short circuit current and i
0
is the field current required to produce
rated voltage read from the air gap line.
Another way to define unsaturated Xd is as follows:
at any
convenient field excitation current such as OF in Fig. II.Sb, the
short circuit armature current is O'B, the excitation voltage for
the same field current is OA read from the air gap line.
Xd is the
ratio of this voltage OA to the short circuit armature current O'B.
The measurement Xd from this definition (by open circuit and
short circuit tests) gives the unsaturated value of direct axis
reactance.
18
Air gap line
A
-----------------B
0
Figure II.Sb.
F
0'
Open Circuit and Short Circuit Characteristics
for Defining xd
a-2.
Saturated direct axis reactance
When great accuracy is not required, the saturated value of
xd at rated voltage Vt is defined by the relation:
(II.ll)
where, referring to Figure II.6
I
sc
is the armature current O'C read from the short circuit
characteristic at the field current of OF corresponding to Vt on
the open circuit characteristic.
19
occ
Rated vt
--------
sec
u
U)
0
Figure II.6.
a-3.
0'
F
Open Circuit and Short Circuit Characteristics
Accurate value of saturated direct axis synchronous
reactance Xd
The effects of saturation under load can be taken into account
with good accuracy by use of a saturation factor determined from the
open circuit characteristic curve.
volts
occ
E
r
(a. g)
E
r
R
Figure II.7.
Air gap mmf
Open Circuit Characteristic Defining
the Saturation Factor
20
Referring to Figure
II.7,
the saturation factor is defined as:
E {a.g)
k
r
E
{II.l2)
r
where:
E (a.g) is voltage corresponding to the resultant mmf R as read
r
from the air gap line
E
r
is air gap voltage read from the saturation curve.
The
saturation factor is a function of air gap voltage E .
r
The saturated synchronous reactance is given by the following
relation:
(II.l3)
where:
x
1
is the leakage reactance found by application of the Potier
method.
x
uns
is the unsaturated synchronous reactance determined by
relation II.ll.
k is saturation factor.
It is noted that the Potier reactance x
leakage reactance x
1
p
may be used in place of the
when the open circuit characteristic is used as
the saturation curve under load.
The method to determine the saturated value of Xd is as follows:
Find the Potier reactance x
Potier triangle ABC.
p
by geometrical construction of a
Fererring to Figure II.8, select a point C on
21
zero power factor corresponding to rated voltage Vt.
Draw the horizontal
line CD equal in length to the field current OC' for short circuits.
Zero pf
I
c
0
Figure II.B.
a
constant
Field current
Open Circuit and Zero Power Factor Characteristics
Through point D draw a line DA parallel to the air gap line.
the vertical line AB.
X
X
p
p
=
The Potier reactance x
p
Draw
is given by:
Voltage drop AB per phase
Zero power factor armature current per phase
(AB)volts
amp
(I )
a
(II.l4)
22
The next step is to compute the air gap voltage
E
± I
r
a
(r + jx )
(II.lS)
P
Knowing E , Figure II.7 gives value of E (a.g) and the saturation
r
r
factor is determined by the relation II.l2.
The saturated direct axis reactance is then:
X
X
p
+
-
rms
X
p
(II.l6)
k
This method is based on simple cylindrical rotor theory but
commonly applied as an
approx~ation
to salient pole machine with
satisfactory results over the normal operating range of the machine.
b.
Transient and subtransient reactances
b-1.
xd, xd
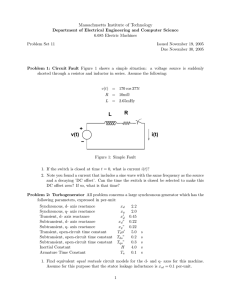
Three phase short circuit test
The transient and subtransient reactances of a synchronous machine
are found by transient short circuit test.
The machine is driven as a
generator, at no load and at rated voltage, and suddenly short circuited.
An oscillograph is used to record the transient short circuit current.
The Figure II.9 shows a symmetrical trace of a short circuit
current wave.
The de component is taken out by subtracting or may be
eliminated by short circuiting at the instant when the d axis is 90°
from the axis of phase a.
The wave, whose envelope is shown in Figure II.lO may be divided
into three periods:
Subtransient period lasting only for the first few cycles, during
which the current decrease is very rapid;
23
the transient period lasting a relatively longer
t~e,
the
current decrement is more moderate:
the steady state period, the current is constant.
B
/
/
Figure II.9.
Symmetrical Curve of
Armature Short Circuit current
B
' ....
A
..j.J
s::
Q)
~""'
()
c
~-:::-:---___
c
--~~----------~---------------------------------------------------------
0
t
Figure II.lO.
Envelope of Symmetrical
Short Circuit Current
24
The subtransient reactance xd determined the initial value OB
of the symmetrical subtransient envelope BC.
It is equal to the
RMS value of the prefault open circuit voltage divided by
OB
1:2
x"
(II.l7)
d
The transient reactance
xd
is the ratio of voltage to current
which is the initial symmetrical value neglecting the initial rapidly
decaying portion; that is the current OA/1:2 in Figure II.lO.
x'
(II.l8)
d
It is noticed that the factor 12has appeared because of the
peak value of current.
Subtransient reactance depends on the initial
(zero-t~e)
current, hence the later must be determined accurately.
The
difference between the transient envelope and the steady state
amplitude is plotted on semi log-paper in Figure II.ll.
gives the initial transient difference current
transient difference current
~I
0
~1
0
Extrapolation
and initial sub-
.
The initial transient current OA and initial subtransient current
OB in relations II.l7 and II.l8 are:
~
~I
0 +
sustained short circuit current
OB =
~1
0 +
sustained short circuit current
OA
25
'
time
Figure II.ll.
b-2.
Current Difference Plotted
to Semi-logarithmic Paper
Locked rotor line-to-line test
While this method is not practicable for determining the
satruated value for turbine generators, i t may be applied to salient
pole machines with damper windings at rated current to obtain a
very good value for the saturated value of subtransient reactance.
A single phase voltage is applied between any two line leads,
with the field winding short circuited on itself and the rotor locked
at standstill.
Readings of voltage and field current are taken for
various rotor positions over a pole pitch.
Two rotor positions are
determined, one for a maximum value of the field current and the
other for minimum value.
The rotor position for maximum field current
is called direct axis position, the other is quadrature axis position.
26
With the rotor in the direct axis position and rated current
£lowing, the subtransient reactance is equal to half the ratio of
applied voltage to line current.
x"
d
Figure II.l2.
E
(II.l9)
2I
Locked Rotor Line to Line Tests
According to Wright, this method can be used to determine
xd
also,
under certain conditions:
"Only for machines without additional rotor circuits hence only for salient pole machines without dampers does this test measure xa· Made at low currents, i t
gives the unsaturated value which, when multiplied by
the empirical factor 0.88 gives, approximately the
saturated value."
27
2.
Quadrature axis reactances
a.
Quadrature axis synchronous reactance x
The quadrature axis synchronous reactance x
q
q
can be measured
by two methods:
Slip test
Maximum lagging current test •
a-1.
The slip test:
Measurement of unsaturated
quadrature axis synchronous reactance
In this test, the machine is driven mechanically at a speed
slightly different from synchronous speed, the field winding is
open and a balanced three phase voltage of correct phase sequence
is applied to its armature terminals.
An oscillograph is used to
record the waves of armature current, voltage applied to the armature
tenninals and voltage induced in the open field winding.
Figure II.l3
shows the general forms of these oscillograms.
The quadrature axis synchronous reactance x
q
equals the minimum
ratio of armature applied voltage per phase to the armature current
per phase and occurs where the induced voltage in the field winding
xd
is maximum. x can be obtained by finding the ratio --which, in
q
X
q
the slip test, approximately equals the ratio of maximum armature
current to the minimum armature current.
Referring to Figure II.l3:
I
X
q
I
max
.
m~n
(II.20)
28
I
i~
Terminal voltage
Armature current
Figure II.l3.
Oscillograms of Slip Tests
Using the value of xd from the open circuit and short circuit test
described previously in this chapter, x q can be determined.
The
value thusly obtained is the unsaturated quadrature axis synchronous
reactance since the test must be made at small values of armature
current.
29
a-2.
Maximum lagging current test
The slip test introduces large errors because of the effects of
the current produced in rotor circuit unless the slip is very small.
In the maximum lagging current test, the machine is running as
a reluctance motor - the field current is reduced to zero - then,
the polarity of the field current is reversed and a small field
current applied in the reversed direction causing an increase in
armature current.
By increasing the field current in the reversed
direction, the armature current increases and reaches a maximum
stable value, any further increase of the field current will cause
the machine to fall out of step.
The quadrature axis reactance is given by the relation:
X
q
(II.21)
=
where:
Vt is the armature terminal voltage per phase.
I
x
ms
q
is the maximum stable armature current per phase.
given by this test is the saturated value since the test
can be made at normal voltage Vt.
Another method for measuring the saturated value of x
q
is based
on a vector diagram of synchronous machines derived from the machine
equation.
The vector equation of a synchronous generator is:
(II.22)
30
where:
Ef is excitation voltage
vt is terminal voltage
I
is load current
Id is direct axis component of load current
I
q
is quadrature axis component of load current
R is machine resistance
a
cos¢ is power factor
o
is power angle .
Figure II.l4 is the phasor diagram drawn for a synchronous
generator supplying a lagging power factor balanced load.
E
f
X I
q q
Figure II.l4.
Vector Diagram of Synchronous Generator
31
From Figure II.l4, we have:
X I
(II. 23)
q q
or:
I
Equation
q
=
I.I. 23
I[cos(¢ +a)]
becomes:
I[cos(¢ + o)]X
q
I(cos¢coso - sin¢sino)x
[Vt + R Icos¢]sino + R Isin¢coso
a
a
=
I(cos¢coso - sin¢sino)X
q
q
Hence:
Xq =
(Vt + R Icoscp)sino + R Isin¢coso
a
a
I(cos¢coso - sin¢sino)
or, dividing through by sine gives:
vt + R Icos¢ + R Isin¢coto
a
X
q
a
(II. 24)
I(cos¢coto - sin¢)
The machine resistance is usually small, and we can neglect it.
If we can neglect the machine resistance, the machine equation
becomes:
Ef
= Vt
+ J'X I + ]'X I
a
q q
and the vector diagram is shown in Figure
II.lS.
32
I
Figure II.lS.
Vector Diagram of Synchronous Generator
with Machine Resistance Neglected
Equation II.24 giving X
q
X
q
=
becomes:
(II.25)
I(cos¢cota -sin¢)
Knowing the terminal voltage vt' load current I, power factor
cos~
and power angle a, the saturated quadrature axis synchronous reactance
x
q
is computed from equation II.24.
Equation II.24 is applied not only to a generator supplying a
lagging power factor load, but also to a motor operating at a
leading power factor for motor case, the sign of the second term in
denominator of equation II.24 changes.
b.
Quadrature axis transient reactance x•
q
Salinet pole machines have no effective quadrature axis rotor
circuit hence:
x'q
xq
For turbine generators, where xq and
x~
are not equal, x;
33
may be taken equal to the saturated value of direct axis transient
reactance
xd.
c.
Quadrature axis subtransient reactance x" of quadrature
q
axis subtransient reactance x" may be taken equal to the direct axis
q
subtransient reactance x
d.
For a salinet pole machine with dampers x" can be detennined by
q
the locked rotor line-to-line test.
The procedure is similiar to
that for determining x".
d
With the rotor in the quadrature axis position and with rated
current flowing,
x~
is equal to 1/2 the ratio of applied voltage
to line current.
xq =
c.
E
21
for quadrature axis position
Calculation of Power Angle and Power Angle Characteristics
1.
One machine connected to infinite bus
The power angle 8 for a machine connected to an infinite bus is
the torque angle since this angle is the difference between the internal
angle of the machine and the angle of the synchronously rotating
reference frame which is in this case, the infinite bus.
a.
One machine connected to infinite bus through a line
with impedance neglected
In this case, the terminal voltage of the synchronous machine
and the bus voltage are equal, VB = vt.
II.24 to calculate power angle
o
We can apply the equation
if quadrature axis is already
34
·x r
J q q
Figure II.l6a.
measured.
Figure II.l6b.
Single Line
Diagram of
one .Hachine
Phasor Diagram
of One Machine
Equation II.24 applied to a synchronous generator is:
X
q
=
Vt + r Icos¢ + R Isin¢cot8
a
a
I(cos¢cot8 -sin¢)
or:
X I(cos¢coto - sin¢)
q
= vt
+RIces¢ + R Isin¢cot8
a
a
(X Icos¢ - R Isin¢)cot8 = Vt + R Icos¢ + X Isin¢
q
a
a
q
cote =
Vt + Ra Ices¢ + Xq Isin¢
X Icos¢ - R Isin¢
q
a
X
tano
V
t
tan
~cos¢·-
R Isin¢
a
+ R Icos¢ + X Isin¢
q
a
-1
q
X Icos¢ - R Isin¢
q
a
vt + R Ices¢ + X Isin¢
a
q
(II.25)
35
In the case of machine resistance neglected:
o=
Xs ______
Ices¢ __
tan _ 1 ____
V + X Isin¢
t
q
(II.26)
The power delivered to the bus per phase is
If the bus voltage is resolved into components Vd and Vq in
phase with Id and Iq, we have
(II.27)
From Figure II.l6b:
Ef- Vtcoso - Raicos(¢ + o)
xd
I
q
=
vtsino + Raisino
X
q
Substitution of these values in equation II.27 gives:
Ef-Vtcoso - Raicos(¢ + o)
Vtsin6 + Raisino
p = ~-------------------------- Vtsin6 +
X
Vtcoso
xd
q
E V
p
f t
= ---xd
.
s~na
2
+ vt
X
-X
d
q
sin2a +
2xdxq
v
R I(cos6 _cos(¢+ 6))
t a
xq
xd
. ~
s~no
(II. 28)
If the machine resistance is neglected
36
This equation is derived from synchronous generators.
applied to synchronous motors with the sign changed.
It can be
For generator
action, Ef leads Vt' for motor action Ef lags Vt.
For cylindrical rotor machine where
X
q
(II.30)
b.
One machine connected to infinite bus through a
series impedance
Consider a salient pole synchronous machine connected to an
infinite bus of voltage VB through a series impedance of reactance
XL per phase.
small.
Resistance will be neglected because it is usually
The single line diagram is shown in Figure II.l2a, and
\1.
phasor diagram in Figure II.l2b.
d axis
I
I
I
·x
I
J q q
Figure II.l7a.
Single Line
Diagram of
One 1-1achine and
Series Reactance
Figure II.l7b.
Phasor Diagram
of One Machine
and Series
Reactance
37
The dashed phasors show the line reactance drop resolved into components
due to Id and Iq.
The effects of line reactance is merely to add it to
the machine reactance:
(II.31)
(II.32)
The expression of angle 8 and power P are similar to equations
II.25, II.26, II.28 and II.29 except that Vt in these equations
is replaced by VB and xd, xq by Xd
1
2.
,x .
ql
Two machine system
When a system has only two synchronous machines, one acting as
a motor and the other as a generator, we can use equation developed
in c-1 to calculate the power angle and power angle characteristics
with the terminal voltage of generator VA as the reference phasor.
In this case, the angle
o
is angle between the internal voltage
of the motor and terminal voltage of generator.
The generator
resistance and generator reactance are included in the determination
of generator voltage.
1
Figure II.l8a.
2
Single Line Diagram of Two Machine System
38
·x
I
J a
_J.2
q
-2
E~
-jX
q2
Id
2
Figure II.l8b.
Application of equations in C-1
Phasor Diagram
of TWo Machine System
gives only the power output of a
generator, the power input of a motor is the power output of
generator minus line losses.
The general forms of machine power in terms of the scalar
values of the internal voltages, machine impedances and impedance
1
of the line connected two machines are :
For machine 1:
motor
(II.33)
For machine 2:
generator
(II. 34)
1
Bibliography No. 12
39
where:
z11=
magnitude of impedance of machine 1
z22=
magnitude of impedance of machine 2
z12=
magnitude of transfer impedance i.e. magnitude of line
impedance
-
8
0.12:
90
8 12:
impedance angle of z
0 12:
01
0 21:
-
-
12
12
02
01.2
Positive power is taken as the power out of machine, therefore power
of generator is positive and of motor is negative.
Substitution of
o12
by
-a 21
in equation II.9 gives:
(II.35)
The generator power P will be maximum when
motor power will reach maximum when 8
21
o21 =
= 90 -
a.
90 + a. 12 and
12
•
When the machine resistance and line resistance are neglected,
8
22
= 90° and a
12
=
0.
The power outputs of both generator and
motor will be maximum when
p
p
o21 =
E1E2
--x12
lmax
ElE2
2max
90° and their values are:
=
xl2
40
III.
A.
EXPERIMENTAL RESULTS
Measurement of Machine Constants
1.
Machine A
The following results were obtained on an 11 KVA, 220 volt,
29 ampere, 1200 rpm, 60 cycle and 3-phase machine.
The equivalent armature resistance measured at ambient temperature and calculated at 75°C is R = 0.142 ohms.
a
The unsaturated value of direct axis reactance xd determined by
open circuit tests is 3.40 ohms.
The saturated value of xd determined
by use of saturation factor k is 3.14.
The saturation factor was
determined from the open circuit characteristic and Potier reactance
assuming that the terminal voltage equals rated voltage 220 volts.
The current is rated current and power-factor equals 0.8. (Appendix B.3)
xd
The slip test determined the ratio
with xd equal to the
q
unsaturated value, x is equal to 2.26 ohms.
x-
q
The transient and subtransient reactances determined from the
oscillogram taken by the three phase short circuit test are:
xd = 0.74 ohms
x" = 0.56 ohms •
d
2.
Machine B
A 15.5 HP, 220 volt, 40 ampere, 1200 rpm, 60 cycle, 3-phase
machine was used as a motor connected to machine A in the measurement
of the power angle of a two machine system.
The machine constants are:
41
X
q
1.90 ohms
xd = 2.90 ohms
x'
d
0.615 ohms
x"
d
0.548 ohms
The direct axis reactance was adjusted for saturation effects, since
the open circuit characteristic of a machine is essentially a direct
axis magnetization curve, the quadrature axis reactance x
assumed to be unaffected by saturation.
q
was
This assumption is suitable
for most practical purposes.
The saturated reactance is a function of the air gap voltage,
when the air gap voltage increases, the saturated reactance decreases,
the air gap voltage depends upon the operating condition of the machine,
i.e., the terminal voltage, the armature of measurement of saturated
reactance determined only one value of reactance assuming the terminal
voltage to be 220 volts, the current to be 29 ampere and power factor
0.8.
Furthermore, the treatment of saturation effects as a function
of a factor to be deduced from open circuit and zero power factor
characteristics is not completely sufficient.
Because of linearity
in the unsaturated region, the unsaturated values of machine reactances
are constant, therefore some analysis methods consist in heating the
machine as an unsaturated one and then correcting the saturation
effects by two saturation factors, one dependent, one direct axis
1
current and one on quadrature axis current •
1 Bibliography No. 12
42
B.
Measur~ent
of Power Angle
Tables III.l and III.2 show calculated and test results when
machine A is energized from an infinite bus.
The machine was
operated as a motor in unsaturated and saturated conditions, i.e.,
the bus voltage is respectively 110 and 220 volts.
The connection
diagram is shown in Fig. III.l; however, the model line was omitted
for this test.
Model line
AC
~--\_.J
rAN'
6 so~~ce
r
DC source
or load
Figure III.l.
Connection Circuit Diagram of
Synchronous Motor
power
source
43
Table III-3 shows the test and calculated values of power angle of
the machine connected to the infinite bus through the artificial
transmission line.
The connection diagram is shown in Fig. III.l.
Tables III-5 and III-6 give test and calculated results of
two machine systems.
The test circuit is shown in Fig. III.2.
Excitation of the generator was varied to hold the terminal voltage
constant at 220 volts, and excitation of the motor was varied so
that the armature current of the motor was minimum, i.e., the power
factor equal to unity.
The angle a between the terminal voltage
of the motor and generator is equal to zero because the two machines
were connected by a line without impedance.
Table III-6 shows the
effects of the impedance associated with the machines.
With the
same power, the power angle is increased when there is an impedance
associated with the machines, i.e., the power limit of the system
is decreased.
The calculation for the operating conditions is
shown in Fig. II.l8b, the connection diagram is the same as Fig. III.2
except the addition of three reactance coils which represent the
transmission line.
44
Figure III.2a.
DC
source
Figure III.2b.
Single Line Diagram of
~ro Machine System:
One Motor and One Generator
DC
source
Connection Circuit Diagram of
Two Hachine System
45
Table III-1
Comparison Between Test and Calculated Values of Power Angle
for the Unsaturated Salient Pole Synchronous Machine
Machine A:
vt
(Volts)
I
avg
(Amperes)
motor, unity power factor
p
8
Angle/Degrees
(Watts)
Test
Calculated
110
5.7
1080
10.68
11.60
110
9
1715
17.80
18.10
110
15
2858
28.00
28.50
110
18
3429
33.30
33.70
110
21
4763
35.10
35.30
110
27
5144
45.50
45.60
110
31
5906
50.00
49.80
46
Table III-2
Comparison Between Test and Calculated Values of Power Angle
for the Saturated Salient Pole Synchronous Machine
(Refer to Fig. III.l)
Machine A:
vt
(Volts)
I
avg
(Amperes)
motor, unity power factor
l?
0
Angle/Degrees
(Watts)
Test
Calculated
220
4.2
1600
3.80
3.85
220
6
2280
5.40
5.54
220
12
4570
11.00
11.05
220
16.5
6287
14.8
15.10
220
20.5
7810
17.20
18.62
220
22.0
8380
18.90
19.91
220
25.0
9525
20.20
22.44
220
27.0
10280
21.30
24.09
220
30.0
11430
24.50
26.49
47
Table III.3
Comparison Between Test and Calculated Values of Power Angle
for the Unsaturated Salient Pole Synchronous Machine
Connected to an Infinite Bus Through the Artificial
Line Designed in Section II
Machine A:
vt
(Volts)
I
avg
(Amperes)
motor, unity power factor
p
8
Angle/Degrees
(Watts)
Test
Calculated
110
5.8
1100
11.00
11.05
110
5.9
1120
11.00
11.24
110
8.25
1570
15.50
15.71
110
8.80
1675
16.50
16.76
110
9.35
1780
17.65
17.81
110
10.50
2000
19.85
20.00
110
15.00
2850
28.00
28.57
110
15.80
3000
30.00
30.10
48
Table III-4
Comparison Between Test and Calculated Values of Power Angle
for the Saturated Salient Pole Synchronous Machine
Connected to an Infinite Bus Through the Artificial
Line Designed in Section II
(Refer to Fig. III-1)
Machine A:
vt
{Volts)
I
avg
(Amperes)
motor, unity of power
p
0
Angle/Degrees
(Watts)
Test
Calculated
220
3.75
1430
4.50
4.72
220
4.80
1830
6.00
6.05
220
8.00
3045
9.50
10.00
220
11.50
4380
13.50
14.85
220
13.00
4950
15.70
16.15
220
16.50
6285
18.86
20.26
220
18.85
7180
20.70
22.92
220
20.85
7940
23.10
25.12
220
24.50
9330
25.50
28.95
220
28.50
10800
28.60
32.88
220
31.50
12000
31.70
35.64
220
32.50
12380
34.20
36.50
49
Table III-5
Test and Calculated Values of Power Angle for the
Two Machine System
c1;negrees
8
Calculated
02
Calculated
2.50
2.60
3.50
6.10
2520
5.60
5.90
6.10
12.00
8.8
3360
7.50
7.70
7.80
15.50
220
11.0
4040
9.00
9.20
9.50
18.70
220
12.0
4440
10.00
10.10
10.40
20.50
220
14.5
5320
11.50
11.90
12.50
24.40
220
16.8
6080
13.00
13.30
14.40
27.70
220
19.5
6800
14.00
14.20
16.60
30.80
220
24.0
8000
15.60
15.80
20.20
36.00
220
27.50
8400
17.00
16.00
22.90
38.90
v
Volts
I
Amp
Watts
220
4.0
1120
220
7.0
220
p
Test
12
Calculated
Table III-6
Test and Calculated Values of Power Angle for the Two
Machine System Connected Through the Artificial Line
Designed in Section II
(l
0
01
Calculated
82
Calculated
Calculated
12
Calculated
4.00
3.70
3.50
1.60
8.80
2240
5.00
5.30
5.30
2.30
12.90
8
3000
6.80
7.10
7.00
2.90
17.00
220
10.5
3840
8.00
8.80
9.20
4.00
22.00
220
13.5
5000
11.00
11.40
11.70
4.70
27.80
220
16.0
5760
12.40
12.60
13.90
5.60
32.10
220
20.0
7000
14.50
14.70
17.20
6.90
38.80
220
22.0
7400
15.00
15.00
18.80
7.60
41.40
220
25.0
7900
15.80
15.20
21.20
8.70
45.10
v
I
p
Volts
Amp
Watts
220
4
1520
220
6
220
Test
U'1
0
51
IV.
CONCLUSION
The analysis of three phase synchronous machines operation depends
upon the constants of the machines; due to saturation effects, the
constants of synchronous machines have different values for different
operating conditions.
The laboratory work was centered on two
synchronous machines in the power laboratory.
All machine constants
such as armature resistance, direct and quadrature axis reactance,
transient and subtransient reactance were measured for both machines.
The resistance was measured at ambient temperature and corrected to
operating temperature.
The direct axis reactance was measured at
saturated and unsaturated conditions .
An artificial line was designed and built for use in the test
of the validity of calculated operating conditions using these
measured constants.
A good agreement was obtained between tests and
calculations.
In power system analysis, the problems to be investigated for a
student who is interested in power area are:
power
f~ow,
power limits,
stability limits (transient and steady state), fault currents and
critical switching time.
These problems can be studied theoretically
and demonstrated in the power laboratory.
Accurate synchronous
machine constants .which are functions of operating conditions are
needed to determine these problems.
saturated and unsaturated machine operating conditions were used
to demonstrate the effects of saturation on the investigation of a
power system.
The machine data needed to demonstrate the above problems has
52
been determined for two machines in the UMR power laboratory for use
in experiments by the student.
and run.
Sample experiments have been set up
A good agreement has been obtained between calculated and
experimental results.
With the two machines in the laboratory and their data obtained,
and with the model transmission line and its characteristics, the
laboratory demonstration and experiments can be performed for or by
undergraduate classes in investigation of the problems of power
systems.
53
BIBLIOGRAPHY
l.
Henney, Radio Engineering Handbook, McGraw-Hill Book Company:
New York, 1959.
2.
Terman, Radio Engineers' Handbook, McGraw-Hill Book Company:
New York, 1943.
3.
Kimbark, Edward W., Power System Stability, Vol. I, John
Wiley and Sons, Inc: New York, 1967.
4.
Kimbark, Edward W., Power System Stability, Vol. 3, Dover
Publication, Inc: New York, 1968.
5.
Stevenson, William D., Elements of Power System Analysis,
2nd Edition, McGraw-Hill Book Company: New York,
1962.
6.
Fitzgerald, A. E. and Kingsley, Charles Jr., Electrical
Machinery, 2nd Edition, HcGrav.r-Hill Book Company:
New York, 1961.
7.
Westinghouse Transmission and Distribution Reference Book,
Westinghouse.
8.
Wright, Sherwin, H., "Determination of Synchronous Machine
Constants by Test", AIEE Transactions, December 1931,
pp. 1331-1350.
9.
Robertson, B. L., Rogers, T. A. and Dalziel, C. F., "The
Saturated Synchronous Machine", Electrical Engineering,
July 1937, pp. 858-863.
10.
Djabir, Hamdisepen, "Saturation Effects in Synchronous Hachines",
AIEE Transactions, December 1954, pp. 1349-1352.
11.
clarke, Edith and Lorraine, R. G., "Power Limits of Synchronous
Machines", Electrical Engineering, December 1933.
12.
Djabir, Hamdisepen, "Une Methode D'analyse du Fonctionnernent
de la Machine Synchrone en Regime Etabli", Revue Crenerale
de l'Electricite, Tome 62, September 1952, pp. 442-448.
54
VITA
Nguyen-Quang-Duoc was born on March 1, 1939 in Hanam, Viet-Nam.
He attended elementary school in Hanoi and High School in Saigon.
He
received an Electrical Engineer Diploma from National Technical
Center, Phu Tho, Saigon in 1964.
Afterwards he served at the National
Technical Center in the Power Laboratory.
He has been enrolled in the Graduate School of the University
of Missouri-Rolla since June 1971 in the program of development of
National Technical Center supported by the U.
s.
Agency for Inter-
national Development and the University of Missouri-Rolla.
55
APPENDIX A
Laboratory Data of Machine A
1.
Data for open circuit characteristic
Speed of machine:
E:
If:
1200 rpm
line to line voltage
field current
Table A-1
Measurements of No-Load Voltage
in Function of Field Currents
E
If
Amperes
E
E
Volts
If
Amperes
Volts
If
Amperes
0
215
4.4
266
6.4
40
0.5
222
4.6
269
6.6
58
1.0
228
4.8
272
85
1.5
233
5.0
276
7.0
112
2.0
238
5.2
278
7.2
138
2.5
243
5.4
282
7.4
161
3.0
248
5.6
286
7.6
182
3.5
252
5.8
288
7.8
202
4.0
256
6.0
290
8.0
208
4.2
260
6.2
Volts
0
/
y
6.8
56
2.
Data for short circuit characteristic
I
:
armature current of phase a
Ib:
armature current of phase b
I
armature current of phase c
a
c
:
Table A-2
Measurements of Short Circuit Current
in Function of Field Currents
If
(Amperes)
I
a
(Amperes)
Ib
(Amperes)
I
c
(Amperes)
0
0
0
0
0.5
5.2
4.6
5.2
1.0
9.6
9.2
9.6
1.5
14.0
13.6
14.0
2.0
18.8
18.6
18.8
2.5
23.5
23.0
23.5
3.0
28.0
27.7
28.0
3.5
32.6
32.5
32.6
4.0
37.0
37.5
37.5
57
3.
Data for zero power characteristic
Armature current = constant = 28.5 amperes
Speed:
rated speed
=
1200 rpm
Vt = terminal voltage (line to line)
Table A-3
Measurements of Terminal Voltage in Function
of Field currents at Rated Armature Current and Zero Power Factor
If
{Amperes)
vt
{Volts)
4.
5.55
6.4
7.10
7.95
144
178
200
222
Data from slip test
Oscillogram from slip test gives:
xd
= 1.5
X
q
5.
Three phase short circuit test
steady state short circuit current
I
ss
= 58 amp
voltage before 3 phase short circuit test v 0 C
Reduction from transient envelope:
=
220 volts
58
Table A-4
Measurements of Short Circuit Oscillogram
6.
b.i
Times
(sec)
Average
Envelope
Values (amp)
0.0050
246
164
0.0125
185
103
0.0200
143
61
0.0300
115
33
0.0325
107
27
0.0425
105
24
0.0500
96
13
0.0550
95
12
0.0650
89
6
0.075
85
3
0.0825
82
0
X
Average Envelope
Values - I
ss
Measurements of power angle
The power angle was measured by using a stroboscope to read the
displacement angle on the axis of the machine.
This angle, the
mechanical angle, was multiplied by 2 to convert to electrical degrees
because a 4 pole machine was used in experiments.
59
(1)
(2)
air gap line
open circuit characteristic
short circuit characteristic
zero power factor characteristic
(3)
{4)
300
t il
(!)
~
-i
Rated voltage
+J
s::
b
{/}
(!)
~
~
+J
.....-!
~
200
::3
u
+J
(])
.,..;
=='
u
01
m
+J
.....-!
0
~
.,..;
u
>
+J
.....-!
m
0
"""
.c
U)
~
·r-i
~
<J)
8
100
0
1
Figure B.1.
2
c•
3
5
6
4
Field current
7
Determination of x andxuns from Data
of Machine A
P
8
60
APPENDIX B
Sample Calculation
1.
Calculation of Potier reactance
Referring to Figure B.l, select a point c on the zero power
factor characteristic at rated voltage (220 volts).
horizontal line cd equal in length to c'O.
Draw a
Through point d draw
the straight line da parallel to the air gap line intersecting
the open circuit characteristic at point a;
draw the vertical
line ab.
Potier reactance is:
X
p
X
p
=
=
Voltage drop ab per phase
Zero-power-factor armature current
36
/3
X
(26.5)
= 0.78 ohms .
The equivalent circuit is shown in Figure B.2.
Figure B.2.
Equivalent Circuit of Synchronous Machine
61
2.
Calculation of unsaturated reactance
Ef(a.g)
X
uns
I
=
for Ia(SC)
a
(SC)
29 amperes, referring to Figure B.l, Ef(a.g)
equals 170 volts.
X
uns
=
170
y'3
29
X
= 3.40 ohms.
3.
Calculation of saturation factor
Assuming the power factor is 0.8 lagging, the rated current
is:
I
29{0.8 - j0.6)
a
=
23.20 - jl7.40
Referring to figure B.2, for generator operation, the air gap voltage
is:
E
220
r
E
r
13
/0 + j0.78(23.20 - j17.40)
= 141.84 volts.
Line to line air gap voltage:
= 141.84
= 246
X
f3
volts.
62
Saturation factor:
E (a.g)
k =
r
E
r
Referring to Figure B.l
k =
288
246
k = 1.17
4.
Calculation of saturated reactance
X
X
-
uns
s
X
p
k
3.40
+
X
p
- 0.78 + 0.78
1.17
3.14 ohms.
5.
Calculation of transient and subtransient reactance
From the Table A-4, the difference
~i
X
between the transient
envelope and the steady state short circuit current is plotted on a
semilogarithm scale as a function of time (Figure B.4).
of this curve gives:
~I'
= 160 amperes
Lli" = 240 amperes
I'
Lli' + I
ss
I' = 160 + 82
I' = 242 amperes
Extrapolation
63
and
I" = !J.I" + I
ss
I"
240 + 82
I"
322 amperes.
The RMS values of transient and subtransient current are:
242
Iill.ts
12
I'
171 amperes
In
322
RMS
RMS
I"
RMS
12
= 227 .. 7 amperes.
The transient and subtransient reactances are:
v
x• =
d
oc
IFMS
x• = 220!13
171
d
x• = 0.742 ohms
d
v oc
x" = I"
d
PMS
XII
d
=
220/13
227.7
x" = 0.56 ohm
d
64
400r-------------------~----------------~
3QQ
'
f.ll
'
.Q)
~
(J)
\
~
'
\
c
\
\ \
·r-1
4-l
\~
c<l)
H
H
200
u=='
100
0.05
Time in seconds
Figure B.3.
0.10
Symmetrical Short Circuit Transient Envelope
65
~I"
200
~I'
100
Ul
<D
~
Q)
~
~
·.-I
.j.J
s::
Q)
~
>-I
8
10
.OS
Time in seconds
Figure B.4.
Ai
X
on Semi-logarithm Scale
66
or
xd
= 0.168 p.u
xd
0.127 p.u
on machine base.
6.
Calculation of power angle
a.
One machine connected to infinite bus
The machine was operated as a synchronous motor, and the excitation
was adjusted to obtain unity power factor.
The machine resistance was
The power-angle in this case is:
neglected.
o
= tan
-l X I
.....s_
(B.l)
vt
15 amperes
for I
Vt
The angle
c
110/1:3 volts
is 28° 50.
The same calculation gives the results in Tables III-1 and
III-2.
When the machine was connected to an infinite bus through an
artificial line, the x
of the line.
b.
q
is the sum of x
q
of the machine and reactance
Tables III-3 and III-4 give the results of this case.
Two machine system
In a two machine
syst~,
one machine was operated as a generator
67
and one as a motor.
power factor.
line.
The motor excitation was adjusted to obtain unity
The two machines were connected through an artificial
Refer to Figure III.l8b.
=
x
tan- 1
cos
-1
q1
rcos<f>
vt + xqlisin¢
X
I
e
vt
The power-angle between the two internal voltages is:
0
=
12
81 + a. + 62
for
and
vt
=
220 voltsj/3
I
=
20 Amperes
01
=
14.70°
a.
=
6.9°
c12
= 38.8
0
When the two machines were connected directly, with no line impedance,
the angle a. equals zero.
Tables III-5 and III-6 give results of these calculations.