10_chapter 1
advertisement

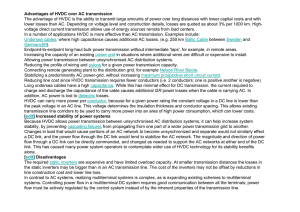
21 Chapter-1 INTRODUCTION 22 1.1 HIGH VOLTAGE DIRECT CURRENT TRANSMISSION With the increase in size and complexity of Power Systems, the problems associated with long AC bulk power transmission like reactive power support, system stability etc have also increased. A search for more efficient mode of transmission has led to the development of DC transmission. The DC transmission requires conversion of power at its two ends. Conversion from AC to DC will take place at the sending end rectifier station and conversion back to AC will take place at the receiving end inverter station. The converters are static, using high power thyristors and the physical process of conversion is such that the same station can switch from rectifier to inverter by simple control action, thus facilitating the power reversal. Advantages offered by HVDC Transmission over AC transmission are as follows [1]: • No reactive line/cable losses Long cables possible, lines cheaper • No synchronizing power Easy to connect AC systems • Controllability Perfect for power transactions • SSC does not increase Upgrading of AC breakers not necessary 23 With system interconnections, following are the possible advantages with HVDC: • Interconnector rating is determined based on the real demand of transmission capacity with DC. Rating of AC interconnector must be higher than the real demand on power exchange. • Increment in power transfer is easily possible with DC. • System operator alone can determine the power exchange between the two systems. • Power oscillation damping and voltage control can be obtained with DC. • DC acts as a shield against stability problems, voltage collapse and cascading blackouts. • Under emergency conditions, pre-determined mutual support between the systems is possible. Conventional applications of HVDC transmission are as follows: 1. For transmitting power through large water bodies spanning 30Km or more. For such distances AC transmission is impossible because of the high capacitance of the cable which requires intermediate compensation stations. 2. For asynchronous interconnections. For inter connecting two or more AC systems which are operating at different nominal frequencies and for stability reasons. 24 3. For transmitting bulk power through long overhead lines. HVDC transmission is economical as compared with AC transmission for distances exceeding 600 km. For the above transmission is mentioned an conventional economical and applications, eco-friendly option. HVDC With development in HVDC technology, liberalization of electricity industry around the world, and the efforts to preserve the environment are demanding HVDC systems as the preferred alternative to high voltage AC systems in many other situations [2]. Details are as follows: • Transmission of power over small distances (less than 60 Km) and at lower power levels (less than 200MW) is economical with the new technologies such as polyethylene DC cables and VSC based HVDC systems. • With liberalization of electricity industry, transmission has become a contracted service and there is no scope for deviation from contracted technical and economic norms. Better control of the power lines is possible with HVDC and is therefore a better alternative for providing transmission services on contractual basis. 25 • The concept of trading to the electricity sector resulted with liberalization. This has resulted in bi-directional power transfers based on market conditions. Bi-directional power flows are possible with HVDC systems. • When the transmission service was owned by the government, land acquisition and obtaining rights-of-way was relatively easier. With deregulation, acquiring land and/or obtaining rights-of-way has become a significant portion of the project’s costs. Since HVDC transmission requires much less land/rightof-way for a given power rating, it is more economical than AC transmission. • To build a power link in environmentally sensitive areas such as national parks and protected sanctuaries, HVDC transmission systems is the only alternative because of its lower foot print. 1.2 POWER SYSTEM STABILITY For a given initial operating condition, power system stability is defined as the ability of an electric power system to regain a state of operating equilibrium after being subjected to a physical disturbance, with most system variables bounded so that practically the entire system remains intact [3]. The power system is a highly nonlinear system which operates in a constantly changing environment; loads, generator outputs and operating parameters change continuously. When subjected to a 26 disturbance, the stability of the system depends not only on the type of disturbance but also on the initial operating condition. Stability of an electric power system is thus a property of the system motion around an initial operating condition. At the equilibrium point all the opposing forces that exist in the system are equal. Power systems are subjected to a wide variety of disturbances. Small load changes occur continuously. The system must be able to adjust to these changing conditions and operate satisfactorily. It must also be able to withstand to severe disturbances, such as a short circuit on a transmission line or loss of a large generator. A large disturbance may lead to the isolation of the faulted elements. For a given physical disturbance, a power system may be stable for an operating point and unstable for another. Design of power systems to be stable for every possible disturbance is impractical and uneconomical. Selection of these design contingencies is based on their probability of occurrence. The response of the power system to a disturbance may involve much of the equipment. For example, a fault on a critical element followed by its isolation by protective relays will cause variations in power flows, network bus voltages, and machine rotor speeds. Power systems experience fluctuations of small magnitudes continuously. When a power system is subjected to a specified disturbance, it is assumed 27 that the system is initially in a true steady-state operating condition for assessing its stability. The ability of synchronous machines of an interconnected power system to remain in synchronism after being subjected to a disturbance is termed as rotor angle stability. It depends on the ability to restore equilibrium between electromagnetic torque and mechanical torque of each synchronous machine in the system. Increasing angular swings of some generators is an indication of instability of the system and this may lead to their loss of synchronism with other generators. Loss of synchronism can occur between one system and the rest of the system, or between groups of machines, with synchronism maintained within each group after separating from each other. 1.2.1 control Strategies for Improvement of System Stability Numerous control schemes have been proposed to arrest loss of synchronism phenomena. They can be broadly classified into two groups, i.e., preventive control and emergency control. Preventive control anticipates events to ensure that the power system is to withstand the most severe disturbances; emergency control is executed immediately after the disturbance. To design effective emergency control schemes much research has been carried out. As 28 an example, load shedding scheme based on the topological and dynamic characterization of stability boundary is proposed in [4] for an emergency generator. On-line emergency control strategy for generator shedding based on PMU measurements is proposed in [5]. Generation rescheduling and/or generation tripping developed in [6] is also an emergency control scheme. Generation shedding based on real time closed loop emergency control schemes are presented in [7]-[8]. Corrective actions based on equal area type criteria together with realtime measurements are computed in the above mentioned methods. To maintain stability, emergency control techniques involve actions on generators and loads. Fast valving and braking resistors [9], fast excitation controllers [10], or tie-line reactance controllers [11] could also be used as means for emergency control of transient stability. In this context, FACTS devices such as TCSC, UPFC etc. [12]-[27] also play a vital role in the improvement of system stability. In power systems where HVDC links have been installed, a better alternative could be to use the converter controls as emergency control means. As AC/DC conversion involves no inertia and power settings of HVDC links can be changed quasi-instantaneously [28], modulating of active power flow through the HVDC-links has been proposed to improve power system stability. Modulation techniques for stability purpose are presented in [29]-[37]. 29 1.2.2 DC Power Modulation With HVDC systems rapid control of transmitted power is possible. They have a significant impact on the stability of the associated AC power systems. Proper design of the HVDC controls is essential to ensure satisfactory performance of the overall AC/DC system like damping of power swings, enhancement of dynamic stability and optimal power flow control [38-61]. The principle involved is to control DC power in response to signals from the AC network. The control of DC power acts in a similar way to a phase angle regulating transformer of an AC system which can influence power flow with just voltage magnitude control. Dynamic control of HVDC systems can be realized only with the availability of suitable overall control strategies and this thesis deals with the derivation of such strategies. The impact of traditional HVDC controls on stability and some new control strategies in the analysis of stability problems are primarily studied in this thesis. 1.3 ENHANCEMENT OF STABILITY USING HVDC CONTROLS 1.3.1 Introduction In improving the performance of large interconnected power systems, the controllability of HVDC link plays an important role. To achieve the desired results, control systems must perform appropriately for various disturbances and system conditions. In the following sections, the basic control philosophy and the auxiliary controls that can be 30 used with HVDC systems for improving the system performance are discussed. 1.3.2 Basic Control Principles The HVDC system is basically constant-current controlled for the following two important reasons: • To limit over current and minimize damage due to faults. • To prevent the system from running down due to fluctuations of the ac voltages. It is because of the high-speed constant current control characteristic that the HVDC system operation is very stable [1]. The following are the significant aspects of the basic control system shown in Fig 1.1, the details of which are explained as under: Fig 1.1: Basic control scheme for HVDC system 31 a) The rectifier is provided with a current control and an α-limit control. The minimum α reference is set at about 50 so that sufficient positive voltage across the valve exists at the time of firing, to ensure successful commutation. In the current control mode, a closed loop regulator (which is a proportional plus integral regulator also termed as Type-0 controller) controls the firing angle and hence the dc voltage to maintain the direct current equal to the current order. Tap changer control of the converter transformer brings α within the range of 100 to 200. A time delay is used to prevent unnecessary tap movements during excursions of α. b) The inverter is provided with a constant extinction angle (CEA) control and current control. In the CEA control mode, γ is regulated to a value of about 150. This value represents a tradeoff between acceptable VAR consumption and a low risk of commutation failure. Tap changer control is used to bring the value of γ close to the desired range of 150 to 200. c) Under normal conditions, the rectifier is on current control mode and the inverter is on CEA control mode. If there is a reduction in the ac voltage at rectifier end, the rectifier firing angle decreases until it hits the αmin limit. At this point, the rectifier switches to αmin control and the inverter will assume current control. These are illustrated in Fig 1.2. 32 Fig 1.2: Actual converter control steady state characteristics d) To ensure satisfactory operation and equipment safety, several limits are recognized in establishing the current order as shown in Fig 1.3 i.e., maximum current limit, minimum current limit, and voltage-dependent current-order limit (VDCOL) and are briefed as follows: i) Maximum current limit: The maximum current limit is usually limited to 1.2 to 1.3 times normal full-load current, to avoid thermal damage to valves. ii) Minimum current limit: At low values of current, the ripple in the current may cause it to be discontinuous or intermittent. This is objectionable because of the high voltages (Ldi/dt) induced in the transformer windings and the DC reactor 33 by the high rate of change of current at the instants of interruption. At low values of direct current, the overlap is small. Operation is objectionable even with continuous current if the overlap is too small. With a very small overlap, the two jumps in direct current at the beginning and end of commutation merge to form one jump twice as large, resulting in an increased stress on the valves. It may also cause flashover of protective gaps placed across the terminals of each bridge. iii) Voltage-dependent current-order limit (VDCOL) : Under low voltage conditions, it may not be desirable or possible to maintain rated direct current or power for the following reasons: When voltage at one converter drops by more than about 30%, the reactive power demand of the remote converter increases, and this may have an adverse effect on the ac system. A higher α or γ at the remote converter necessary to control the current causes the increase in reactive power. The reduced ac system voltage levels also significantly decrease the reactive power supplied by the filters and capacitors, which often supply much of the reactive power absorbed by the converters. At reduced 34 voltages, there are also risks of commutation failure and voltage instability. These problems associated with operation under lowvoltage conditions may be prevented by using a “voltagedependent current-order limit”. This limit reduces the maximum allowable direct current when the voltage drops below a predetermined value. The VDCOL characteristics may be a function of the ac commutating voltage or the dc voltage. Fig 1.3: Steady-state V-I characteristic with VDCOL, minimum current limit and firing angle limits Higher-level controls may be used, in addition to the above basic controls, to improve AC/DC system interaction and enhance AC system performance. All schemes used to date have used the above modes of operation for the rectifier and the inverter. However, there are some situations that may warrant serious investigation of a 35 control scheme in which the inverter is operated continuously in current control mode and the rectifier in α-minimum control mode. 1.3.3 Enhancement of AC System Performance using HVDC Controls In a DC transmission system, the basic controlled quantity is the direct current, controlled by the action of the rectifier with the direct voltage maintained by the inverter. A DC link controlled in this manner buffers one AC system from disturbances on the other. However, it does not allow the flow of synchronizing power which assists in maintaining stability of AC systems. The converters appear to the AC systems as frequency-insensitive loads and this may contribute to negative damping of system swings [1]. Also, the DC links may contribute to voltage collapse during swings by drawing excessive reactive power. Supplementary controls are needed to exploit the controllability of DC links for enhancing the AC system dynamic performance. There are a variety of such higher level controls used in practice whose performance objectives change with the characteristics of the associated AC systems. Reasons for using supplementary controls for DC links are as follows: 36 • Improvement of oscillation damping • Improvement of transient stability. • System disturbance isolation. • Frequency control of small isolated systems. • Dynamic voltage support and Reactive power regulation. HVDC links can be controlled in a number of ways by adding supplementary control schemes to the basic control structure. The purposes of these supplementary control schemes are multiple and in general they have been developed to satisfy the particular condition of each HVDC project [62-64]. Therefore, there is no general control scheme applicable to all systems. The supplementary control structure associated with the HVDC link is helpful in improving the damping of the overall system. With proper design of supplementary control loop of the HVDC link, the damping ratio of the system can be increased to a safe value, which cannot be attained solely using power system stabilizers. The electromechanical inter-area oscillations can be reduced effectively with power modulation through the HVDC link. The control signals used tend to be unique to each system under consideration. Generalized control schemes applicable to all systems have not been developed so far. To modulate the DC quantities, the 37 supplementary controls make use of signals derived from the AC system. The modulating signals derived from the AC system can be system frequency, voltage magnitude and angle, and line flows. The control signal selection depends on the system characteristics and the desired results. In order to augment transient stability limit large signal modulation is used, thereby improving system security. Large changes in the power flow in the DC link are required to compensate for tripping of loads, generators or AC ties. The limits imposed by ratings of the link usually do not curtail the benefits of power modulation, while overload capability in DC links is useful. Hence, significant improvements can be expected out of the use of DC links in emergency control. The rapid response of DC link controllers helps in arresting large deviations in the frequency by matching generation with the load in the area in which the DC link is connected [65]. Some of the aspects in the application of power modulation in a DC link are discussed in the following sections. 1.3.4 Control Signals In large multi machine power systems, there are many modes of generator rotor oscillations. The stabilizing control is used to damp one or more of the predominant modes of oscillation. The controller can introduce new undamped modes if proper care is not taken at the 38 design stage. By increasing the bandwidth of the controller some of the difficulties can be overcome but it can lead to noise interference. It is desirable to obtain control signals locally. Control signals that can be used for supplementary controllers are as follows: • Rotor frequency of adjacent generator • Converter bus frequency • Parallel AC tie line power or current • Phase angle changes in the AC system [66]. In the case of a single machine system, the above signals work satisfactorily. An ideal control signal should have only the components of oscillation which are to be damped. The extraneous components such as at supply frequency and harmonics, sub-synchronous frequency oscillations, local mode oscillations when the damping is desired for inter-area modes, can pose problems. These are suppressed by suitably designed band pass or notch filters. Control signals derived from relative power angle deviation, relative speed deviation, and acceleration of the various machines in the system may be used for DC power modulation with multi machine systems. Different combinations of these signals may also be employed depending on the type of system. This means it involves derivation of signals from local as well as remote machines. Fig 1.4 illustrates the application of the above control signals for a typical ac-dc system. 39 Fig 1.4: AC-DC system controller showing the modulated converters 1.3.5 Types of Controllers The evolution of present day control strategies adopted for power system applications can be traced from conventional or classical control strategies followed by optimal, robust, adaptive and intelligent control techniques. Characteristic features of these controllers are explained below. 1.3.5.1 Conventional Control Strategies The design objective of a linear controlled process is to have the controlled variables behave in certain desirable ways. The problem involves the determination of the control signal, u(t), over the prescribed time interval so that the design objectives are all satisfied. 40 One of the commonly used controllers is a PID controller, which applies a signal to the process that is a linear combination of proportional, integral and derivative of the actuating signal. Since these signal components are easily realized and visualized in the time domain methods, PID controllers [67] are commonly designed using time-domain methods. The integral and derivative components of the PID controller have individual performance implications. The PD controller is an anticipatory control i.e., by knowing the slope, the controller can anticipate direction of the error and use it to better control the process. The function of derivative control is to measure the instantaneous slope of error signal, e(t), and take a proper corrective action before the excessive overshoot actually occurs. Intuitively, derivative control affects the steady-state error of a system only if the steady-state error varies with time. The PI controller improves the relative stability and steady-state error at the same time, but the rise time is increased. The problem of selecting a proper combination of KI and KP is more acute than in the case of the PD controller. Best features of each of the PI and PD controllers are utilized in the PID controller. 41 For the design of controllers in power systems which are basically non-linear, the classical control theory using frequency domain methods can be employed by linearizing the system around an operating point. The objective of damping controllers is to provide adequate damping torque on the rotor at the dominant mode of oscillation, without sacrificing synchronous torque. The optimization of the controller performance is done by trial and error. The main objective in the design of controllers is to adjust the proportional, integral and the derivative gains of the plant to operate reliably under all possible operating conditions. The time-domain representation of each of the above mentioned linear controllers are given by the following equations: • PI controller u = KP e+KI ∫edt (1.1) • PD controller u = KP e+KD (1.2) • PID controller u=KP e+KI ∫edt+ KD (1.3) Where KP, KI and KD are proportional, integral and derivative gains, e is the error signal and u is the control signal. 1.3.5.2 Optimal Controller The optimal control theory is essentially based on minimizing a chosen performance index subject to constraints in the system. In most of the applications of the optimal control theory to power 42 system problems, a linearized system model is considered. These control strategies are optimal only for the linear system and not for the actual nonlinear system. The optimal control theory has been applied to the design of HVDC modulation controllers [68]-[72]. However, the optimal controller designed for one operating condition may not work satisfactorily for other operating condition. Besides such controls need accurate mathematical model of the power systems. Consider a large-scale linear system given by (1.4) = A x(t) + (1.4) where, x(0) = x0 x(t) Є Rn is a state vector, ui(t) Є Rmi is a control vector, and = m. The information available to the local controller is assumed to be yi(t) = Cix(t) , i = 1,2,.......,k where, yi(t) Є Rri is a local output vector, and (1.5) =r. The response y(t) is due to nonzero initial conditions that are caused by disturbances. The primary objective of the design is to damp out the response due to initial conditions quickly without excessive overshoot and oscillations. 43 The local control ui(t) and the local output Yi(t ) are related by the following expression: ui(t ) = EiYi(t ) , i = 1, 2 ..............k (1.6) where, Ei is a time-invariant gain matrix. Method I: The first method is based upon computing the complete state feedback and reducing it to a specific control action along with a decentralized structure. In this case the performance index of the following form is introduced. dt J= (1.7) where Q = Q′ ≥0, R=diag (Ri)>0, i=1,2,…......,k; and to determine the optimal control law which minimizes (1.7) subject to dynamic constraints : = A x(t) + Bu(t) where , B=[B1, B2,.....Bk] (1.8) & U′= [Ul′, U2′,.......Uk′ ] The solution is given by (1.9). u(t) = F x(t) F = R-1B′ K (1.9) Where, K is the positive definite solution of the algebraic Riccati equation: A′K + KA - KBR-1B′K + Q = 0 (1.10) 44 Having the full state feedback, the next step is to reduce this to a specified decentralized structure, i.e., a control given by (1.6). Method II: The second method is based on minimization of the de-centralized quadratic performance index dt J= (1.11) Q = Q′ ≥ 0, R i =Ri ′ > 0, and i = 1, 2,.....,k Both approaches lead to the control law of the form ui(t ) = Eiлi x(t ) (1.12) where, the values of the matrices Ei and лi depend on the specific approach chosen. 1.3.5.3 Robust Controller The main objective of a control engineer is to design a system that works satisfactorily in real environment. The control system must be able to withstand to the changing operating conditions as they are likely to change with time. Robustness is the particular property of a control system to operate properly in realistic conditions i.e., the controller must perform satisfactorily for a family of plants. A robust controller is a controller that can satisfactorily control a class of system with specified uncertainties in the process model, and the problem of designing controllers that satisfy robust stability and performance requirements is called robust control. 45 For satisfactory operation of modern power systems, controllers have to guarantee robustness over a wide range of system operating conditions. Hence, robustness is one of the major issues in the design of power system controllers. Attempts have been made to apply robust control theory to the design of HVDC modulation controllers [73]-[79]. Apart from linear, optimal and robust controllers, adaptive controllers can also be employed which are known to give better performance. 1.3.5.4 Adaptive Controller An adaptive controller is defined as a controller with adaptable parameters and a mechanism for adjusting the parameters. Adaptive control theory is an attractive control technique for HVDC systems because the dynamic response of the HVDC system changes with variations in the operating conditions. References [80]-[84] report the investigations carried out with adaptive techniques which use modern control theory for developing the necessary modulation signals to respective control strategies. In the design of the controller, these techniques need accurate mathematical models of the system under consideration. It becomes difficult to develop precise mathematical models for the practical power systems as they are complex and highly non-linear. Hence, mathematical based schemes face some disadvantages. In order to overcome these 46 disadvantages, many applications of artificial intelligence have been investigated in different areas of power systems. 1.3.5.5 Intelligent Control Schemes The extensive application of AI techniques to a wide range of power system problems has been witnessed in the literature. These techniques fall into four categories: expert systems, artificial neural networks, fuzzy sets, and heuristic search. ANN applications are more numerous than fuzzy sets or heuristic search and expert system applications are more advanced than the other categories. Expert systems: These systems are computer programs that possess expertise in a given area. This expert knowledge is normally stored in one of many forms, including rules, decision trees, models, and frames. Many of the expert systems abilities like decision making, archiving knowledge, heuristics or judgment, matches with different application areas of power systems. Expert systems are particularly useful for these problems when a large amount of data must be processed in a short time period. Knowledge acquired from human experience can be used to solve complex problems of power systems and in taking decisions on its planning, design and operation with the aid of expert systems. They are best suited for real time control and operations planning. Design 47 of HVDC controls [85]-[88] is one such area where expert systems find application. Artificial Neural Networks : (ANNs) are biologically inspired systems that transform a set of inputs into a set of outputs through a network of neurons, each of which generates one output as a function of its inputs. The inputs and outputs are usually normalized, and the output is a nonlinear function of the inputs that is controlled by weights on the inputs. The network can be supervised or unsupervised and it learns these weights during training. Numerous ways of connecting the network and its training methods are available. The power system problems that are best suited for ANN applications are classification or encoding of an unspecified nonlinear function. ANNs have the ability to generate quick results soon after receiving the inputs. This feature of ANNs is best suited for real time operation of power systems. Also they are most suitable for finding quick approximations of complex numerical calculations and to classification related problems. ANNs also have been applied to the design of HVDC modulation controllers [89]-[91]. Heuristic Search: Simulated annealing and Genetic algorithms are two forms of heuristic search, which solves optimization problems by randomly generating new solutions and retaining the better ones. In 48 searching processes, generation of solution is important. The generated solution should lead to a better solution which can minimize the chances of settling around a local minimum. Both the above mentioned techniques can be applied to optimization problems with arbitrary objective functions and constraints. These search techniques find application in HVDC controls [92]-[94]. Fuzzy Logic: Compared with the traditional logic systems, fuzzy logic is very close to human thinking and natural language. Fuzzy control which is based on this fuzzy logic, provides an effective means of extracting the inexact nature of the real system. FL controller is based on a set of linguistic control rules and is related by the dual concepts of fuzzy implication and the compositional inference rule. The above mentioned controller provides a sequence of operations to be performed to convert the linguistic control strategy based on expert knowledge into an automatic control strategy. The results obtained by the FLC are more accurate than those obtained by the conventional controllers. These fuzzy logic based controllers are well suited for applications involving complex analyses or when the available source of information involves uncertainty or inexactness. Fuzzy logic is appropriate in many areas of power systems where the available information involves uncertainty. With fuzzy logic both the input and output data are translated to symbolic form from numeric 49 form and the control knowledge is specified as fuzzy rules. Fuzzy logic theory is used for real-time control operations and operations planning. In the design of a fuzzy logic controller, mathematical model of the system is not needed. To generate a desired control objective, it requires a qualitative knowledge on the behavior of the system. And it is very easy to add expert / heuristic knowledge about the system behavior into the controller structure. The change in parameters or operating conditions will not affect the performance of the fuzzy logic controller. The applications of FL based controllers in the power systems have been an active research area for the last two decades [95, 96]. To modulate the DC power, Fuzzy logic based controllers can be applied to HVDC systems. This can be achieved in response to a control signal derived from the AC system. The effectiveness of the control can be enhanced by increased overload rating of the converters which permit short – term overloads. Thus, the rapid controllability of power in a DC link can be used to advantage in improving the transient stability of the AC system in which the DC link is embedded. The power flow can even be reversed in a short time (less than 0.25sec). 50 1.4 THESIS OBJECTIVE For a power system with an embedded HVDC link, the fast acting converter control offers a feature for hierarchical control of the system following a system disturbance. Many researchers investigated the fuzzy logic-based controller applications in the HVDC transmission systems [97-108], but the application of such a controller in the HVDC systems has been studied in a limited manner mostly confining to SMIB systems. The objective of this research work is to develop fuzzy logic based control schemes for more general multi machine power systems, which are simple and effective in damping the oscillations. 1.5 WORK PRESENTED IN THE THESIS The work presented in this thesis mainly focuses on application of different types of auxiliary controllers employing different types of control signals derived from the ac system. Studies are made on single machine infinite bus system as well as on multi machine system. Initially, a single machine system is considered with parallel AC and DC transmission link, having a Type–0 Auxiliary controller and a Proportional Integral type current controller for the HVDC system. The control signals derived from variation of active power in the parallel AC line, generator speed deviation, generator power angle deviation 51 and generator acceleration. These are used individually and in combination. The signals derived from the machines and their combinations may be viewed as P, D, P-D, P-I and P-I-D controllers derived from speed deviation. Later, a typical multi machine system is considered with similar current controller for the HVDC system and auxiliary controllers with control signals derived from local as well as remote machines. The signals used are average of relative power angles, average of relative speed variations and average accelerations of different generators. In addition, the signal derived from adjacent AC line power flow is also used. These signals are used individually and in combination. In both the above cases, the gains associated with the error signals are chosen by trial and error. Finally, application of Fuzzy Logic based modulation controllers have been studied for multi machine system. This study has been carried out in two ways: In the first case, fuzzy logic approach has been used to tune the gains of PID controller. The gains of the three error signals are adjusted in every sampling interval in accordance to a set of linguistic control rules and in conjunction with fuzzy logic. In the second case, the inputs to the fuzzy logic modulation controller are taken as error and 52 its derivative and the output of this controller is used as the auxiliary signal. The error signal used in this case is the average of relative speed deviations of all the machines in the system. The performance of this controller is compared with the conventional PID controller. 1.6 OUTLINE OF THE THESIS Chapter wise summary of the work done in the thesis is briefly given below: In chapter 1, the salient features of HVDC transmission highlighting its role in the improvement of AC system stability are presented. Literature survey reviewing different DC power modulation controllers is presented. In chapter 2, transient stability analysis of AC-DC system is discussed. AC/DC load flow study which is a prerequisite for the transient stability analysis is discussed in detail. Eliminated variable method which dispenses with the DC variables thereby modifying the AC Jacobean matrix is used in the load flow study. Models of Generators, Loads and HVDC systems used in the stability study are described. In chapter 3, a single machine infinite bus system with parallel AC and DC transmission link is considered and applications of different 53 types of auxiliary controllers for improvement of system stability are discussed. In this analysis different control signals derived from generator speed deviation, generator power angle deviation, deviation of generator accelerating power and variation of power in the parallel AC line are used individually and in combination. The gains associated with these control signals are chosen by trial and error. In chapter 4, the analysis carried out in chapter 3 is extended to a multi machine system with an embedded DC link. Effects of different control signals like average of relative power angles, average of relative speed variations, average accelerations of different generators and variation of adjacent AC line power flow are analyzed individually and in combination. In this analysis also, the gains associated with the control signals are chosen by trial and error. In chapter 5, Fuzzy Logic Controller application has been studied for the multi machine system presented in chapter 4. A variable gain Fuzzy Logic controller is developed for the system which adjusts the gains associated with the control signals in every sampling interval in accordance to a set of linguistic control rules and in conjunction with fuzzy logic. The performance of this controller is compared with that obtained in chapter 4. 54 In chapter 6, a new fuzzy logic control scheme is developed for the same multi machine system presented in chapters 4 and 5. This scheme makes use of average of relative angular speeds of all the machines and its derivative as inputs and output as auxiliary stabilizing signal. The performance of this controller is analyzed. Conclusions arrived from the above analysis on single and multi machine ac-dc systems are presented in chapter 7.