Critically Damped Oscillator Paper
advertisement

Over Damped and Critically Damped Oscillator
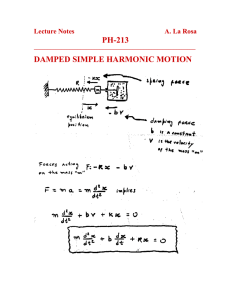
The equation for a damped harmonic oscillator is
&&
x + ! x& + "02 x = 0
The solution may be obtained by assuming an exponential solution of the form x(t) = Aept so that
x(t) = Ae pt so x& = pAe pt , and &&
x = p 2 Ae pt
Substituting the trial solution into the original equation it becomes:
(p
2
+ ! p + "02 ) Ae pt = 0
In order to satisfy this equation either A = 0 or the quantity in parenthesis is zero; if we assume the
former then x(t) =0, and while a valid solution is not all that interesting. The other alternative is to
find the values of p that satisfies the quadratic equation, which are:
p=
!"
"2
±
! #02 = !a ± m
2
4
The constants a and m have been introduced to simplify later expressions and their definitions
should be obvious. There are three cases to consider: real distinct roots, degenerate roots, and
complex roots. In the case of over damping the roots are real and distinct, in the case of critical
damping the roots are degenerate, and in the case of under-damped motion the roots are complex.
Consider first the over-damped case in which the roots are real and distinct.
x(t) = e!at ( Aemt + Be!mt )
with the velocity given as:
v(t) = !ae!at ( Aemt + Be!mt ) + me!at ( Aemt ! Be!mt )
The coefficients A and B are determined by specification of the initial conditions x(0) and v(0) which
give rise to two equations that are solved simultaneously for A and B. If x(0) is x0 and v(0) is v0 then
the equations are:
x0 = A + B and v0 = !a ( A + B) + m ( A ! B)
Solving for A and B and using the expression obtained the expression for x(t) is
x(t) =
e!at
( mx0 + ax0 + v0 ) emt + ( mx0 ! ax0 ! v0 ) e!mt )
(
2m
By inspection x(0) and v(0) return the appropriate initial conditions. The graph in figure 1 shows the
displacement of the oscillator on the vertical axis vs. time on the horizontal axis. The initial position
and velocity were set to x(0) = 1 and v(0) = +3 m/sec (black curve) and x(0) = 1 and v(0) = -3
m/sec (blue curve).
©Anderson Associates
1
Over Damped a = .6, m=.3
The critically damped case occurs when the roots of the quadratic or characteristic equation are
equal, which implies that m is zero. Examination of the solution shows that for m = 0 the form of
x(t) is indeterminate as the exponentials inside the brackets go to 1 yielding a solution of the form
0/0.
x(t) =
e!at
( mx0 + ax0 + v0 ) emt + ( mx0 ! ax0 ! v0 ) e!mt )
(
2m
x(t) may be found by finding the limit of the above expression as m tends to zero by expanding the
exponentials and letting m go to zero or more simply by using L’Hopital’s rule, which may be done
in this case by differentiating of the numerator and denominator with respect to m and then letting m
tend to zero. Doing so given the result for x(t) as
x(t) = x0 e!at + (ax0 + v0 )te!at
The new solution is of the form x(t) = Ae-at +Bte-at, and we have thus found the critically damped
solution. It should be noted there are many ways to find this solution, for example using the method
of variation of parameters, however this is perhaps the simplest. The graph above is duplicated,
however now the critically damped solutions are included as well as the over damped solutions. As
the graph suggests the critically damped solutions approach the equilibrium position more rapidly
than their over damped counterparts.
©Anderson Associates
2
Over damped and critically damped m = 0 for critically damped solutions.
Over Damped Solution – Alternate Form
The over damped solution stated above was
x(t) =
and may be written as
x(t) =
e!at
( mx0 + ax0 + v0 ) emt + ( mx0 ! ax0 ! v0 ) e!mt )
(
2m
" emt + e!mt %
" emt ! e!mt %% e!at
e!at "
+
ax
+
v
$ mx0 $
' ( 0 0 )$
'' =
( mx0 cosh mt + (ax0 + v0 ) sinh mt )
m #
2
2
#
&
#
&& m
This alternate formulation is included as it will be used in exercises that follow.
The importance of damping is illustrated in many applications; for example pneumatic door closers
should be designed so that the return mechanism will not impart excessive force causing the door to
overshoot equilibrium and thus bang into the door jam causing objectionable noise and doing
potential damage to the door. Pneumatic closers are generally equipped with a damping adjustment
so that the closer can be critically damped.
Another important example is in the design of an automotive suspension. The suspension should be
designed in such a way that the car will return to its equilibrium as quickly as possible with little or no
overshoot. The usual design is for slight overshoot as this will give a smoother ride, however from a
handling point of view the closer the suspension to critical damping the better.
©Anderson Associates
3
The Under Damped Case
Before tackling the problem with damping the solution for the undamped oscillator is obtained. The
purpose of doing so is to show the general techniques used to solve the problem with damping and
to illustrate the role of complex numbers in the treatment of this and many other problems. The
equation without damping is
&&
x + !02 x = 0 with ( p 2 + !02 ) Ae pt = 0 " p = ±i!0
Thus the solution may be written as
x(t) = Aei!0 t + Be"i!0 t
Using the same technique as above the values of A and B may be obtained by satisfying the initial
conditions namely the initial position x(0) and the initial velocity v(0) which are:
x0 = x(0) = A + B and v0 = v(0) = i!0 ( A " B)
There appears to be a problem with these equations since both the initial conditions are real
quantities, however the equations at first glance suggest the initial velocity is imaginary. In order for
there to exist meaningful solutions it is necessary to assume A and B are complex numbers, namely
A = ! + i" and B = # + i$
so that
x0 = A + B = (! + " ) + i (# + $ ) % # = &$
v0 = i'0 ((! & " ) + i (# & $ )) = i'0 (! & " ) + '0 ($ & # ) % ! = "
The fact that the initial position and velocity are both real necessitates picking A and B with the
stipulations required by the above equations. After examination it should be clear that α = β requires
that α = β = x0/2, likewise ε = - δ requires ε = v0/2ω0 so that A = x0/2 - i v0/2ω0 and B = x0/2 + i
v0/2ω0 and thus the solution that satisfies the initial conditions is
#x
#x
# ei"0 t + e!i"0 t & v0 # ei"0 t ! e!i"0 t &
v &
v &
x(t) = % 0 ! 0 ( ei"0 t + % 0 + 0 ( e!i"0 t = x0 %
(!i %
(
2
2
$
' "0 $
'
$ 2 2"0 '
$ 2 2"0 '
But the sum of exponentials divided by 2 is just cos(ω0t) and the sum of the difference divided by 2
is i*sin(ω0t), so the solution may be written as:
x(t) = x0 cos !0t +
v0
sin !0t
!0
In order to check to see that this is the proper solution, note that the solution returns the appropriate
initial conditions. Finally, before leaving this example, it should be noted that x(t) may be written as
either a sine or cosine function with an amplitude and phase both of which depend on the initial
©Anderson Associates
4
conditions of the problem. To illustrate assume x(t) may be written as Acos(ω0t - δ) then it follows
that:
x0 cos !0t +
v0
sin !0t = A cos(!0t " # ) = A cos !0t cos # + Asin !0t sin # $
!0
x0 = A cos # and
v0
= Asin #
!0
From the last equation it follows that A and φ are given as:
2
"v %
A = x +$ 0 '
# !0 &
2
0
and ( = tan )1
v0
x0!0
The same technique may be used to show that any choice of sine or cosine with plus or minus a
phase angle can be used. The amplitude will always be the same, but the phase angle will change sign
for the various possibilities. Try all possible combinations out as an exercise – it illustrates the many
ways the solution to this problem may be expressed.
The Oscillator with Damping
The solution to the damped oscillator is found by following the same program used to solve the undamped oscillator. The algebra is just a touch more tedious but the methodology is identical: solve
the auxiliary equation to find its roots, write the equations for the two unknown constants A and B
that satisfy the initial conditions, allow A and B to be complex, find their solutions, and then use
them to find the expression for x(t). The auxiliary equation, as it is often called, in p is:
(p
2
+ ! p + "02 ) Ae pt = 0
and p is given as where the magnitude of the natural frequency is assumed to be greater than γ2/4:
p=
!"
"2
!"
" 2 !"
±
! #02 =
± i #02 !
=
± i#1
2
4
2
4
2
The expression for p has been modified for this case in which ω0 is greater than γ and thus the
expression for p is complex. In terms of the values for p the solution of the oscillator is
x(t) = e!" t /2 ( Aei#1t + Be!i#1t )
Notice that ω1 and ω0 are different numbers; ω1 is the angular frequency of the damped oscillator
whereas ω0 is the frequency of the undamped oscillator called the natural frequency of the oscillator.
Since we already know the values of A and B are going to have to be complex for real solutions as in
the previous case the initial conditions for the system may be written immediately as
A = ! + i" and B = # + i$
x0 = A + B = (! + # ) + i (" + $ ) % " = &$
©Anderson Associates
5
Which is exactly the same as the previous case, the expression for the velocity, however is more
complex as v(t) is given as:
& =
v(t) = x(t)
!" !" t /2
e
Aei#1t + Be!i#1t ) + i#e!" t /2 ( Aei#1t ! Be!i#1t )
(
2
!"
((# + i$ ) + (% + i& )) + i'1 ((# + i$ ) ! (% + i& ))
2
!"
"
v0 = (# + $ ) + %1 (& ! ' ) ! i (' + & ) + i%1 (# ! $ )
2
2
v0 =
From this equation in order for the imaginary part to be zero α must equal β and as was the case
before ε = -δ. But if α = β then α = x0/2 = β using the expression for x0. In a similar fashion using
the expression for v0 the relationship between α, β, δ, and γ it follows that
v0 +
! x0
v
!x
= 2"#1 or " = 0 + 0 = $%
2
2#1 4#1
Putting it all back together the solution for x(t) may be written as
*$ x
$x
$ v
$ v
" x ''
" x ''
x(t) = e!" t /2 ( Aei#1t + Be!i#1t ) = e!" t /2 ,&& 0 ! i & 0 + 0 ))) ei#1t + && 0 + i & 0 + 0 ))) e!i#1t /
,+% 2
/.
% 2#1 4# ((
% 2#1 4#1 ((
%2
Now using the Euler identity – recall the expressions for sine and cosine in terms of the exponentials
and by inspection x(t) may be written as: (Maybe careful inspection – but inspection nonetheless.)
*
$v
"x '
x(t) = e!" t /2 , x0 cos #1t + & 0 + 0 ) sin #1t /
% #1 2#1 (
+
.
As a check it is easily verified that this expression returns the appropriate initial conditions. As an
exercise show this to be the case. The graph on the next page shows a lightly damped oscillator with
initial position x = 2.4 meters and initial velocity 10 m/Sec. The green dashed line is the decay
envelope and the red line is the actual displacement of the oscillator as a function of time. How
would the graph differ is the initial velocity were -10 m/Sec?
©Anderson Associates
6
Damped Oscillator & Decay Envelope
Summary – What have we accomplished?
The solution to the damped oscillator has been found for the cases of over damping, critical damping
and under damping. The solutions presented are general solutions in the sense that each solution
includes arbitrary initial conditions so that the solutions presented may be used for any problem by
simply substituting the appropriate initial conditions. The method used to find each solution was the
same. Often one encounters a mix of approaches that can be confusing initially and thus an effort
has been made to adopt a consistent approach for all three cases. The expression for the overdamped
case expressed as a decaying exponential times the hyperbolic functions (page 3) is not generally
discussed but will be used in several exercises and is particularly useful when considering the
transition from one case to the next, for example when the roots transition between real distinct and
degenerate the expression may be used to easily determine the change in the character of the
solution.
©Anderson Associates
7
The Damped Driven Oscillator
The systems that we have looked at to this point have been free in the sense that no outside agent is
acting upon them, that is the oscillator is given an initial nudge that imparts an initial velocity at some
position at a time we call zero and then the solution represents the time evolution of the oscillator.
Next consider an oscillator that is driven by some outside agent with a force F(t). What do we expect
to happen? Suppose the system is acted upon by a force that varies as cos(ωdt) and may be written as
F(t)=F0cosωdt, where ωd is called the forcing or driving frequency. Now we have three ω’s, the
natural frequency ω0, the damped frequency ω1, and the driving frequency ωd. The equation that
describes this situation is
&&
x + ! x& + "02 x = F0 cos "d t
The differential equation that describes this system is a linear second order equation and as such if
you have a general solution to the homogenous equation and a particular solution to the
inhomogeneous equation then the sum of these two is also a solution, about which more will be said
later. However, at present we shall focus on only the steady state solution and will try to make an
intelligent guess as to what a steady state solution might look like. Suppose the oscillator is initially at
rest at the equilibrium position when the forcing function is applied. For this situation the
homogenous solution is x(t) = 0 and the resulting particular solution will be the steady state solution.
Even if the homogeneous solution were not zero after a period of time passes the homogeneous
solution will contribute nothing to the motion since it decays exponentially.
Thus we conclude that if a steady state is reached the solution to the homogeneous equation will
disappear since it is exponentially damped and all that will remain is the steady state solution caused
by the driving force, referred to as the forcing function. The driving force, however has a frequency
ωd and thus we might well guess that the steady state solution will have the same frequency of
oscillation. The name “forcing function” is used to suggest this latter point. In what other ways can
the steady state solution differ from the driving force? It would appear the most general answer is
that the steady state solution can also differ in amplitude and phase, but will have the same frequency
as the forcing function, therefore we shall assume a solution of the form:
x p (t) = Ae (
i ! d t "# )
If the postulated solution, xp(t) is a solution, it will satisfy the inhomogeneous equation above with
the appropriate choice of A and δ. Upon taking the derivatives of xp(t) and substituting them into the
equation above one obtains:
(!"
2
d
+ i#"d + "02 ) Ae (
i " d t !$ )
=
F0 i"d t
e
m
Where the driving force is the real part of the exponential on the right. The term eiωt cancels out and
the expression above may be written as:
(!"
2
d
+ i#"d + "02 ) A =
F0 i$
e
m
Separating the real and imaginary parts of the above expression gives:
(!
©Anderson Associates
2
0
" !d2 ) A =
F0
F
cos # and $!d A = 0 sin #
m
m
8
Squaring, adding and simplifying gives A and δ as
A(!d ) =
F0
m
1
(!
2
0
"!
2 2
d
) + (#! )
2
and $ = tan "1
d
#!d
(! " !d2 )
2
0
This is then the steady state solution to the driven oscillator. We are now left the task of interpreting
this rather complicated looking solution. A, the amplitude, has been expressed a function of the
driving frequency to emphasize that the amplitude and phase both depend on its value. As was
alluded to all of the values that determine the amplitude and phase are fixed and thus cannot be used
to satisfy the initial conditions. The amplitude of oscillation may be expressed in a second form by
doing a bit of algebra and introducing a quantity Q defined as Q=ω0/γ. This second form is
frequently encountered and very useful.
A(!d ) =
F0
m
1
(!
2
0
"!
A(!d ) =
F0
m
2 2
d
) + (#! )
=
2
d
F0
m
1
2
$! ! ' # 2
!0!d & 0 " d ) " 2
% !d !0 ( !0
1
(!
2
0
2
" !d2 ) + (#!d )
2
=
F0
k
!02 = k / m so
!0
!d
2
$ !0 !d '
1
& " ) + 2
% !d !0 ( Q
The algebra is a bit obtuse and thus it is recommended you make certain you see how the result was
obtained. There are three important cases; The magnitude of A in the low frequency limit, the value
of A when the driving frequency matches the natural frequency, and the high frequency limit. For ωd
= 0 the amplitude is given as:
A(0) =
F0
F
= 0
2
m!0
k
For a very low frequency, such as ωd near zero, the oscillator behaves as if it is being “dragged” by
the forcing function and when the forcing function reaches its maximum or minimum value the
oscillator will be F0/k = ±A(0) meters from the equilibrium position. Indeed if the forcing function
did not vary with time, but were just equal to F0, the oscillator would be displaced to A(0) and remain
at that position. The phase angle, which is the phase between the displacement and the forcing
function is zero when ωd = 0, and this means the displacement and applied force are in phase with
one another.
The amplitude of the oscillator at ω0 = ωd is seen to be A(ω0 = ωd) = Q(F/k)
"F %
A(!0 = !d ) = $ 0 ' Q
#k&
©Anderson Associates
9
As the driving frequency increases well past the resonant condition the amplitude decreases rapidly.
Resonance – the driving frequency is varied and the natural frequency is fixed.
When the driving frequency and the natural frequency are equal the amplitude gets very large and the
phenomenon is referred to as resonance. In the case we are discussing it is assumed that the driving
frequency is being varied, and in this case the relative maximum of the peak in the graph above is not
at ωd = ω0, but slightly below it. If on the other hand ωd is held constant and the natural frequency is
allowed to vary the resonant peak occurs at ω0 = ωd. In either case the amplitude is maximum when
(
2
2
the denominator is minimum, so to find the maximum find the derivative of ! 0 " ! d
2
) + (#! )
d
2
,
set it equal to zero and solve for the appropriate ω. If this is done in the case in which the driving
frequency is varied the maximum occurs at a value just a bit below ω0 as seen by examination of the
following equation. (The value computed is for the values used in the example.)
2
d
1
2
!02 " !d2 ) + (#!d ) = 0 $ !d = !0 1 " 2 = .968
(
d!d
2Q
The case that is being described is very common and occurs often; a simple mass spring system
driven by a sinusoidal force will exhibit this kind of resonance and while the maximum does not
occur at exactly ωd = ω0 the difference is very small and frequently not experimentally measurable
for a high Q system. If the differentiation is carried out with respect to ω0 the natural frequency of
the oscillator then:
2
d
2
!02 " !d2 ) + (#!d ) = 0 $ !d = !0
(
d!0
©Anderson Associates
10
This type of situation occurs when the oscillator is “tuned”, such as in the case of a tunable LC
circuit used in the first RF stage of a radio. The oscillator’s natural frequency is varied by means of a
variable capacitor and the current in the circuit reaches a maximum when the natural frequency
matches that of a signal delivered by the antenna. A mechanical oscillator could likewise be tuned by
changing the mass or for that matter the spring constant.
In the first case, that is the case in which the driving frequency is varied it is interesting to note that
the resonant peak occurs below either the natural frequency or the damped frequency of the
oscillator. Using the numbers in the example the various frequencies and their corresponding
amplitudes are:
!0 = 1
with A(!0 ) = 2.86
!1 = !0 1 "
1
= .984 with A(!1 ) = 2.89
4Q 2
!max = !0 1 "
1
= .968 with A(!max ) = 2.90
2Q 2
Resonant Curve for a Tuned Oscillator
Phase Considerations
We have discussed the amplitude as a function of driving frequency in some detail; however there is
also a shift in phase between the oscillator and the driving force that is important to understand and
an aspect of the problem that is generally not given the attention it deserves. When the driving
©Anderson Associates
11
frequency is very low, approaching zero, the oscillator is literally being dragged by the forcing
function and the displacement and driving function are in phase as mentioned earlier. The amplitude
and phase relationships are reproduced here for convenience.
A(!d ) =
F0
m
1
(!
2
0
"!
2 2
d
) + (#! )
d
2
and $ = tan "1
#!d
(! " !d2 )
2
0
The phase angle is the phase between the driving force and the displacement. Indeed, as noted above
as the driving frequency approaches zero the phase angle likewise tends to zero. As the driving
frequency approaches the natural frequency of the oscillator the phase angle approaches π/2, and in
the high frequency limit the driving force and the displacement are π radians out of phase with one
another or as the expression goes “180 out”. The low frequency limit is easily understood in term of
the explanation above and like wise the high frequency limit makes sense; the driver is oscillating so
fast the energy can not be absorbed by the oscillator. In the high frequency limit the displacement
and driving force are π radians out of phase so that as the oscillator goes positive the driving force is
negative and vice versa. The net result is the high frequency driving force tends to oppose the
displacement with the subsequent result that the amplitude of oscillation tends to zero. Put another
way the driving function’s frequency is so high the oscillator does not have time to respond to the
forcing function.
Perhaps the most interesting and most difficult case to grasp occurs when the driving force and
displacement are π/2 out of phase with one another, which occurs when the driving frequency and
natural frequency are identical. When the driving force and displacement are π/2 out of phase the
driving force always acts in a way to augment the motion of the oscillator – the driving force is
always “pushing” the oscillator in the direction it is going – the driving force never pushes the
oscillator in the “wrong” direction. In the graph below the oscillator starts at the origin and the
driving force is maximum. As the oscillator approaches its maximum positive displacement the
driving force drops to zero and reverses pushing the oscillator back toward the equilibrium poison
exerting its maximum value as the oscillator passes through the origin with its maximum velocity.
This process is repeated every half cycle and as the driving force is never in opposition to the
displacement it makes sense this circumstance will lead to maximum amplitude.
Driving Force vs. Displacement with π/2 phase difference
©Anderson Associates
12
If the phase is changed from π/2 the force is not maximum when the oscillator passes through
points of zero displacement and there are intervals when the driving force opposes the motion and
thus decreases the amplitude. In the graph below the driving force and displacement are out pf phase
by about π/6 radians and in some regions the driving force clearly is in opposition to the
displacement, a situation that does not occur with a 90 degree phase shift. For example when the
driving force is at its minimum value the oscillator is still approaching its minimum value, but
between the two minima the applied force is in opposition to the displacement driving down the
displacement of the oscillator.
Driving Frequency 206 mHz or ωd=1.3, Natural Frequency 159 mHz or ω0 =1.
The Total Solution
As was mentioned above the total solution of the damped driven oscillator consists of a so-called
general solution, which is the solution to the homogeneous equation and a particular solution that is
the solution to the inhomogeneous equation. The general solution has associated with it two arbitrary
constants which are used to satisfy the initial conditions of the problem. The steady state solution is
referred to as a particular solution and it is the solution to the inhomogeneous equation or the socalled steady state solution. The steady state solution is the solution that remains after the general
solution has died away due to exponential damping. Because the system is linear the sum of the
general and particular solution constitute the complete solution to the problem. The complete
solution is composed of transient terms (those that die) and a steady state term that remains as long
as the driving force is in place. The theory of linear differential equations also allows another claim to
be made; solutions to linear differential equations are unique. Thus once you have arrived at the
complete solution it is the solution. Symbolically:
xcomplete = xgeneral + x particluar = complete solution which is unique
xgeneral = B cos(!1t " # ) A and # arbitrary constatns
x particular = F cos(!d t " $ ) where F = A(! )
©Anderson Associates
13
Suppose that a damped oscillator is driven and initially the position of the oscillator is x(0) = x0 and
v(0) is v0. Find the solution. The solution may be written as:
x(t) = e!" t ( A cos(#1t) + Bsin(#1t)) +
F0
k
1
(#
2
0
!#
2 2
d
) + ("# )
2
cos(#d t ! $ ) with $ = tan !1
d
"#d
# ! #d2
However in order to make the solution a bit easier express the general solution as:
x(t) = xg (t) + x p (t) = Ae!" t cos(#1t ! $ ) + F cos(#d t ! % )
Please note that a change in notation has been made. A(ω) has been replace by F(ω) and A and β are
now the arbitrary constants used to satisfy the initial conditions. In order to satisfy the initial
conditions it follow that:
x0 = A cos ! + F cos " and v0 = #
$A
cos ! + %1 Asin ! + %d F sin "
2
From the first equation Acosβ = x0 - Fcosδ, and upon substitution into the second equation it
follows that
x0 ! F cos " = A cos # so that
%
v0 ! $d F sin " + ( x0 ! F cos " ) = $1 ( x0 ! F cos " ) tan #
2
%
v0 ! $d F sin " + ( x0 ! F cos " )
%
v ! $d F sin "
2
tan # =
=
+ 0
$1 ( x0 ! F cos " )
2$1 $1 ( x0 ! F cos " )
A=
x0 ! F cos "
cos #
Note : $1 = $0 1 !
1
4Q 2
Now x(t) may be written as:
$ x ! F cos " ' !* t /2
x(t) = & 0
cos(+1t ! # ) + F cos(+d t ! " )
) e
% cos # (
F
1
where F = 0
k + 2 ! + 2 2 + *+ 2
(
0
d
) ( )
d
Evaluation of x(0) reveals that it reduces to x(0) = x0. The expression is rather messy, however it is
clear that at t = 0 the solution reduces to the appropriate value. As an exercise verify that v(0) = v0.
The graphs that follow are for lightly damped oscillator (γ=.1, ω0 = 1, and Q = 10) being driven with
frequency ωd = 1.1. The upper and lower horizontal lines are the amplitude of the steady state
solution and the exponential curve represents the strength of the transient solution. One the transient
is dead only the steady state solution remains. If the initial conditions are changed the shape of the
oscillation will be altered.
©Anderson Associates
14
2
0
Typical Solution with Transient
This is the same oscillator but with a much higher initial velocity.
©Anderson Associates
15
Energy of an Oscillator
For a simple harmonic oscillator without damping it is easy to show that the total energy of the
system may be expressed as E= ½ kA2, where A is the maximum amplitude. The total energy of the
oscillator is just the sum of the kinetic and potential energies and with no damping the energy will
remain constant, however with damping the amplitude decays since the dissipative term or damping
terms does non recoverable work on the system and thus the oscillator’s amplitude decays.
Since the damping force is –bv it follows the work done by friction is:
W friction = ! "
x(t )
x(0)
bvdx = !
"
t
0
bv 2 dt < 0
Using the general solution for the damped oscillator an expression for the energy as a function of
time can be obtained. The position and velocity may be expressed as:
x(t) = e!" t /2 A cos (#t ! $ )
% !"
(
v(t) = e!" t /2 A ' cos (#t ! $ ) ! # sin (#t ! $ ) *
&2
)
But the velocity may be rewritten by factoring ω as
% !1
(
% !"
(
v(t) = e!" t /2# A '
cos (#t ! $ ) ! sin (#t ! $ ) * = e!" t /2# A '
cos (#t ! $ ) ! sin (#t ! $ ) *
& 2#
)
& 2Q
)
For a high Q system the cosine term in the velocity may be ignored, as it is much smaller than the
remaining term. For example if Q = 10 the cosine term is down by a factor of 20. Thus the total
energy may be expressed as:
E=
%1
(
1 2 1 2
1
mv + kx = e!" t ' m# 2 A 2 sin 2 (#t ! $ ) + kA 2 cos 2 (#t ! $ ) *
&2
)
2
2
2
However mω2 is very nearly equal to k since the difference between ω and ω0 is so small for a high
Q system. So that if the energy at t = 0 is E0 it follows that E(t) = E0e--γt.
E = E 0 e! " t
Thus a remarkably simple result is obtained for the energy decay as a function of time. The energy
decays at twice the rate as the amplitude. Armed with this expression for the energy as a function of
time it is now easy to interpret the meaning of Q, the quality factor.
Quality Factor
The quality factor of an oscillator is related to the energy lost per oscillation, δE, and the total energy
stored in the oscillator. It was shown above that the oscillator’s energy decreases over time due to the
work done by friction and further it was shown that E(t) is an exponential decay, so the change in
energy is:
©Anderson Associates
16
dE
= !" E0 e!" t = !" E
dt
# #
1
Q = 0 $ because # = #0 1 !
"
"
4Q 2
E = E0 e!" t so
The approximation is very good and gets better as the Q of the system gets larger; a Q of only 5
changes ω by only one part in 200 – nearly as pure as Ivory soap. Rearranging the equation for dE/dt
one can write
!E "
dE
#t = $ E#t
dt
But the time required for the oscillator pass through one radian is δt =1/ω so
Q=
E Energy stored in Oscillator
=
!E
Energy lost per radian
So far the quantity Q has been used in several instances but now a definition has been developed that
gives it physical meaning. Recall that Q is used to find the difference between the natural frequency
and the damped frequency, and Q times A(0)=F0/k is equal to the amplitude of a driven oscillator
when the driving frequency equals the natural frequency. And while we have not yet shown it Q is
related to a quantity called the half maximum of the resonant peak, which is a measure of the
sharpness of the resonance with respect to frequency. Q is a very useful quantity and once known
gives one a great deal of insight into the nature of the system.
Power
The damped driven oscillator must be furnished with energy in order to maintain a constant steady
state oscillation. The instantaneous power of the oscillator may be computed as P = Fv, which for
the damped driven oscillator is given as:
P(t) = Fv =
!"d F02
% "# (
cos ("d t ) sin("d t ! $ ) with $ = tan !1 ' 2 d 2 *
2
& "0 ! "d )
m ("02 ! "d2 ) + "d2# 2
This expression is for the steady state condition for which the transient solutions are assumed to
have died. Note that unlike the transient parts of the solution the expression for the instantaneous
power is independent of the damped frequency. Using the expression for the instantaneous power it
is now possible to calculate the average power over a period, or
P(t) =
!
T
0
P(t)dt
In order to evaluate this integral the double angle formula is used to obtain an expression for the
average power.
©Anderson Associates
17
!"d F02
P(t) =
("
m
2
0
!"
2 2
d
)
2 2
d
+" #
%
T
cos ("d t ) (sin("d t)cos $ ! cos ("d t ) sin $ ) dt
0
"d F02 sin $
P(t) =
("
2m
2
0
2
! "d2 ) + "d2# 2
The maximum average power occurs when the driving frequency and the natural frequency are equal.
In order to express the power at other frequencies the expression for sine δ must be expressed in
term of the driving frequency, which is easy to do using the expression for tangent of δ.
!d F02 sin "
Pmax =
2m
(!
2
0
#!
2 2
d
)
=
2 2
d
+! $
F02
2m$
=
F02Q
2m!0
!0 =!d " = % /2
Using the expression for tangent of δ one may write sinδ as:
"d#
sin ! =
("
P("d ) =
2
0
so that
2
$ "d2 ) + "d2# 2
"d2# F02
(
2
2m ("02 $ "d2 ) + "d2# 2
)
=
P("d ) =
"d2# F02
(
2
2m ("02 $ "d2 ) + "d2# 2
)
# F02
2
%%
(
(
"
"
1
0
d
2m" '' $ * + 2 *
'& " " ) Q *
0
& d
)
2
0
A plot of the power as a function of the driving frequency appears as:
Average Power vs. Driving Frequency, Power in Watts and Frequency in Radians
©Anderson Associates
18
The power absorption curve is very nearly symmetric about the maximum and it is useful to define
what is called the half maximum width of this curve. In order to do so using the expression for the
average power as a function of the driving frequency it may be recast as follows.
P(!d ) =
!d2" F02
(
2
2m (!02 # !d2 ) + !d2" 2
)
=
" F02
2
$$
'
!0 !d '
1 )
&
2m! & # ) + 2
&% ! ! ( Q )
0
% d
(
2
0
The expression above is an exact expression for the power expressed as a function of the driving
frequency and reduces to the maximum value when the driving frequency and the natural frequency
are identical. Assuming that the Q of the system under discussion is high, say greater than 10, then
for driving frequencies near the natural frequency the two may be assumed close in value allowing for
the following approximate expression:
2
2
2
# !0 !d &
1 # !02 " !d2 &
1 # (!0 + !d ) (!0 " !d ) &
1
"
+
=%
%
(
( + 2 =%
( + 2
2
!0!d
$ !d !0 ' Q $ !0!d ' Q $
' Q
2
2
2
# ( 2!0 ) ( *!0 ) &
1 ( 2*!0 )
1 ( 2*!0 )
+2
)%
+ 2=
+ 2
( + 2=
!02
Q
!02
!0
$ !0!d
' Q
Now substituting this approximate expression into the expression for the average power the
expression above becomes:
P(!d ) "
# F02
2m ( 4$!02 + # 2 )
Now if the driving frequency is set to the natural frequency the expression above reduces to Pmax
and if we require:
If
F02
"02
P
4!" = # = 2 then P("d ) =
= max
Q
4# m
2
"
so !" = ± 0
2Q
2
0
2
This expression shows that the higher the Q of the oscillator the more sharply peaked the power
absorption curve.
Knowledge of Q thus gives one a very good idea of an oscillator’s character. Knowing Q you can
compute the difference between the damped frequency and the natural frequency, you can determine
the amplitude of the resonant peak, you can determine the peak power absorption in steady state,
and you can determine the bandwidth.
©Anderson Associates
19