Information Design
advertisement

Information Design:
The Random Posterior Approach
Laurent Mathevet
Jacopo Perego
Ina Taneva∗
New York University
New York University
University of Edinburgh
April 1, 2016
Abstract
Information affects behavior by influencing beliefs. Information design
studies how to disclose information in order to incentivize players to behave
in a desired way. This paper is a theoretical investigation of information
design, culminating in a representation theorem and a fundamental application of it. We adopt a random posterior perspective, viewing information
design as belief manipulation rather than information disclosure. The representation theorem shows that it is as if the designer manipulated beliefs in a
specific way, giving form to the random posterior approach in games, as did
Kamenica and Gentzkow (2011) in one-agent problems. The representation
theorem can also be implemented in specific problems, for example in the
beauty contest and multiple-agent problems. We focus on an application
that we call the Manager’s Problem.
∗
We thank Elliot Lipnowski, Qingmin Liu, Efe Ok, David Pearce, József Sákovics, Ennio
Stacchetti, Max Stinchcombe and Siyang Xiong for helpful comments and conversations. We
also thank seminar audiences at Columbia University, New York University, and the SIRE BIC
Workshop.
E-mail: lmath@nyu.edu and jacopo.perego@nyu.edu and ina.taneva@ed.ac.uk
1
2
1.
L. Mathevet, J. Perego, I. Taneva
Introduction
In incomplete information environments, behavior is determined by payoffs and
beliefs. In principle, this suggests two ways to create incentives. On the one hand,
we can affect an agent’s behavior by manipulating his payoffs, for example by
taxing bad behavior, rewarding efforts, offering insurance, etc. On the other hand,
if the environment allows it, we can do so by manipulating his beliefs. Information
designs studies the latter. In information design, a designer has information that
is unknown to a group of agents, and she commits to which information she will
disclose so as to induce desired behaviors.
This paper is a theoretical investigation of information design, culminating in
a representation theorem and a fundamental application of it. In this exploration,
we define the central concepts of the information design problem, identify the constituents of the solution, and the representation theorem assembles them, giving
the expression of the random posterior approach in games, as did Kamenica and
Gentzkow (2011) in one-agent problems.
The representation theorem also comes with practical insights and can be implemented in specific problems. In particular, we propose a fundamental application that we call the Manager’s Problem. A manager oversees a supervisor and a
worker and wants them to exert high effort in all circumstances. The manager has
more experience and will know whether the project is easy or hard. She is deciding
what to tell her subordinates about it, then they will make up their mind and act.
The manager’s problem is that the supervisor only wants to work hard when the
project is difficult and the worker wants to adjust his effort to his supervisor’s.
The manager’s objective is for both of them to always work hard. How should she
inform them about the difficulty of the project, given that they all share the same
prior beliefs about it?
Information design is about manipulating beliefs, and information is only a
means to that end. Therefore, we cannot understand information design if we do
not understand beliefs. In interactive environments, a player formulates beliefs
about the uncertain state of world given the information he received, but also formulates beliefs about the other players’ beliefs about the state, and beliefs about
their beliefs about his beliefs about the state, etc. These higher-order beliefs,
as they are called in the literature, are absent from one-agent problems, but are
an inevitable part of strategic interactions under incomplete information. As a
result, the information designer must harness hierarchies of beliefs to manipulate
Information Design in Games
3
behavior. In this sense, information design is, in its practical form, applied epistemic game theory or belief engineering. In the manager’s problem, for example,
the supervisor’s behavior is essentially determined by his first-order beliefs, while
the worker’s behavior is essentially determined by his beliefs about his supervisor’s beliefs (called second-order beliefs). The manager must then manipulate the
supervisor’s first-order beliefs and the worker’s second-order beliefs.
In the scheme of all games and desirable outcomes thereof, especially when
asymmetries are considered, there is no reason to expect public information to be
predominantly optimal.1 Because of that, private information—having different
players hold different beliefs—will also play a major role in information design,
giving rise to non-trivial hierarchies of beliefs and raising fundamental questions.
When exactly is private information better than public information? Which players should the designer “convince” primarily? How do properties of games affect
optimal information disclosure? These questions are also relevant in the real world,
as in the communication of stress test results, firms’ intra-communication, marketing, political campaigning, etc.
Model. Players interact in an environment where the state of nature is distributed according to prior µ0 . A designer (possibly, a third party) will learn the
state and she is deciding which messages she will send the players in every realized
state that might occur. That map together with the message space is the information structure. The designer commits ex-ante to an information structure, an
assumption that has been used and discussed in Kamenica and Gentzkow (2011)
and Bergemann and Morris (2015). The designer has (possibly state-dependent)
preferences about the players’ action profiles, as the manager who would want her
subordinates to adjust their effort to the state. The interaction following the designer’s choice of an information structure is a standard Bayesian game, in which
players are assumed to play a Bayes Nash equilibrium. A linear selection rule picks
one equilibrium in case of multiplicity. For example, if the designer is optimistic
(pessimistic) and believes that the best (worst) equilibrium will occur, then the
max-rule (min-rule) prevails. The information design problem is the designer’s
choice of an information structure that maximizes her ex-ante expected utility in
the selected equilibrium.
Results. An information structure induces a distribution over profiles of hier1
Just to mention some examples: in multiple agent problems alone, public information is
only optimal when the designer’s objective is concave (see the Supplement). In the manager?s
problem, optimal disclosure involves private information.
4
L. Mathevet, J. Perego, I. Taneva
archies of beliefs, called a random posterior. The random posterior approach
establishes that the information design problem is as if the designer was choosing a random posterior. The premise is that we can learn a great deal from this
equivalence, even sometimes implement the designer’s choice more easily with this
knowledge.
Our representation theorem tells us that the designer’s problem proceeds as
if she optimally mixed over minimal consistent random posteriors, subject to the
prior beliefs averaging to µ0 across these random posteriors. That is to say, the
theorem narrows down the designer’s focus to specific random posteriors: those
minimal consistent ones that satisfy a form of Bayes’ plausibility. A priori the
designer should contemplate all distributions over hierarchies of beliefs. Clearly,
the property that a player’s (first-order) beliefs must average to µ0 , a key insight
from the one-agent case, must apply here to every player. In fact, it must hold in
a strong form, because every player knows it applies to everyone, knows that everyone knows it applies to everyone, etc., so that this property must be commonly
believed. However, even common belief in Bayesianism leaves room for players
to agree to disagree. By insisting on consistent random posteriors, the theorem
says that the designer cannot possibly hope to manipulate beliefs in a way that
would leave players to agree to disagree. What is more, the set of consistent random posteriors is convex and admits extreme points. Those extreme points can
be characterized: they are the (consistent) random posteriors having ‘minimal’
support. In the tradition of extremal representation theorems,2 the designer only
needs to be concerned with this specific subclass and distributions thereof. In
the one-agent case, (the Dirac measures on) the first-order beliefs of the agent
are the minimal random posteriors, so that there can be only one realization of
beliefs for every minimal random posterior. In contrast, there can be many belief
realizations for minimal random posteriors in games, and the theorem provides
the appropriate form of Bayes’ plausibility.
In the representation given by the theorem, every minimal consistent random
posterior has a value given by the designer’s utility evaluated in equilibrium, and
a “cost” or a “price” measured by the prior belief distance from µ0 . In that sense,
the constraint can be seen as a form of budget constraint. More generally, the
designer might not have the tools to induce all possible consistent distributions
on the universal type space. In applied works, for example, the designer is often
2
For example, the Minkowski–Caratheodory theorem, the Krein-Milman theorem, Choquet’s
integral representation, etc.
Information Design in Games
5
restricted to a subset of information structures. Fortunately, the representation
theorem carries over to the constrained case. Moreover, given the importance of
minimal random posteriors, in both the constrained and the unconstrained case,
we spend some time characterizing them in the context of public and conditionally
independent information, both being widely used in applications. We also study
the mathematical structure of the set of minimal random posteriors and draw
important implications from it.
From a practical viewpoint, the theorem reduces the information design problem from information structures to random posteriors—this reduction is drastic
under redundant information—and then shifts attention from all random posteriors to the minimal ones. This still leaves the designer contemplating a very large
set of options. In fact, if she wants to contemplate all the minimal random posteriors that she might ever need, given any group of players she might face, any
underlying game they might play, any preferences that she might have about the
outcomes of that game, and given any prior she might have, then we prove that
she will have to hold on to all of them. That is, every (finite-support) minimal
random posterior is the (essentially unique) optimal solution to some problem,
which is why the specifics of the problem, namely the designer’s preference and
the game, must be used to trim the set of minimal random posteriors.
To understand the representation theorem and implement it, we unpack its
content into smaller problems that can be solved separately and then re-assembled.
This process broadly separates the value of public and private information and
delivers a concave-envelope representation of optimality. This is done in Corollary
1, which decomposes the representation theorem in two parts. First, there is
a maximization within, taking place among the minimal subspaces with equal
average prior beliefs. At this stage, we can limit attention to payoff-equivalent
subspaces, a simple observation that invites us to use the specifics of the problem
to solve it. Second, there is a maximization between that patches together the
minimal random posteriors that are solutions to maximizations within. This step is
akin to a public signal, sending players to an optimal minimal random posterior. In
one-agent problems, only maximization between remains and the corollary reduces
to Kamenica and Gentzkow (2011)’s concave envelope result.
The Manager’s Problem Solved. In the manager’s problem, the supervisor’s
and the worker’s hierarchies of beliefs appear directly in equilibrium and in a simple truncated form, making this problem the epitome of belief manipulation in
games. Our representation theorem leads to a crisp analysis. A revelation argu-
6
L. Mathevet, J. Perego, I. Taneva
ment reduces the set of random posteriors to consider. As a result, it is actually
sufficient to consider random posteriors over “truncated” hierarchies, consisting
of only the first-order beliefs of the supervisor and the second-order beliefs of the
worker. Such random posteriors admit an instrumental characterization of consistency and of minimality. The representation theorem can then be described
as a tractable nested maximization problem. We solve this problem for a specific
designer who cares about the worker’s action only. This example clearly illustrates
the respective roles of maximization within and maximization between. Optimal
information disclosure prescribes silence for low priors, talking to the supervisor
only (that is, private partial information) for intermediate priors, and talking to
both for high priors.
Literature Review. This paper is part of a recently active literature on information design. In general, this literature differs from the literature on cheap
talk formulated by Crawford and Sobel (1982) because the designer can commit
to a communication protocol. This commitment assumption has been discussed
extensively. The one-agent problem has been a rich subject of study since the
seminal work of Kamenica and Gentzkow (2011) (KG hereafter), in relation to
Aumann and Maschler (1995), Brocas and Carrillo (2007), and Benoı̂t and Dubra
(2011). Kamenica and Gentzkow (2011) have provided an elegant approach to
single-agent information design problems, leading to a clear characterization of
optimality. From there, Gentzkow and Kamenica (2014) study the problem with
costly information disclosure; Galperti (2015) studies the problem when the designer has greater knowledge than the agent (described as heterogenous priors);
Lipnowski and Mathevet (2015) provide methods that simplify the computation of
an optimal disclosure policy, bringing KG’s abstract characterization to concrete
disclosure prescriptions for a psychological audience; Kolotilin et al. (2015) study
the problem with a privately informed agent, drawing connections to the standard
linear mechanism design with transfers; and Ely, Frankel, and Kamenica (2015)
study dynamic information disclosure to an agent who gets satisfaction from being
surprised or feeling suspense.
The theory of information design in games, however, is at an early stage,
although optimal solutions have been derived in specific environments. There is,
for example, a literature in the global game tradition (e.g., Morris and Shin (2002)
and Angeletos and Pavan (2007)) that studies optimal information precision and
its underpinnings in linear environments. The problem usually assumes additively
separable, normally distributed, either conditionally independent or public signals.
Information Design in Games
7
The computation of the welfare optimal variance of the private and of the public
signal is the information design problem solved directly in these papers. More
recent work derives optimal information structures in voting games, but focuses
on public information (as in Alonso and Camara (2015)), so that hierarchies of
beliefs are characterized by first-order beliefs.
This paper is most closely related to Bergemann and Morris (2015) and Taneva
(2015), as they provide a systematic approach to general information design problems in games. They develop a general method based on a notion of Bayes’ correlated equilibrium that characterizes all outcomes under all information structures.
This formulation is amenable to linear programming and, as such, it is an effective
way to compute the optimal solution to an information design problem (under the
max selection rule). This paper offers a different perspective, adopting a random
posterior approach to the problem, as in KG, and providing an as if representation
of the structure of the problem and of its solution. Specifically, the representation theorem puts beliefs at the center of the theory, while viewing the problem
as concavification (of a previously built value function) in practice. Section 8.2
detail the differences between both approaches.
In the next section, we present the manager’s problem. In Section 3, we present
the framework and the information design problem. In Section 4, we define key
concepts from epistemic game theory and random posteriors. Section 5 develops
the theory leading to the representation theorem. Section 6 studies the implications of the theorem. With this in mind, we return to the manager’s problem
and apply the theorem to solve it. In Section 8, we discuss some of our assumptions and highlight differences between our approach and the linear programming
approach. Finally, Section 9 concludes.
2.
The Manager’s Problem
A manager is overseeing a supervisor and a worker who collaborate on a project.
An unknown variable θ determines the type of project that they are facing.
Projects come in two types, θ ∈ {0, 1} (easy or hard), which only the manager is
able to eventually observe. The project type is distributed according to µ0 ∈ ∆Θ,
which is common knowledge. Let µ0 := µ0 (θ = 0) = 65 . The manager must decide
what she will tell her subordinates about the state, after which they will make
up their mind and act. The interaction between the supervisor and the worker is
described by the following game:
8
L. Mathevet, J. Perego, I. Taneva
θ=0
0
1
θ=1
0
1
0
1
1, 1
0, 0
1, 0
0, 1
0
1
0, 1
1, 0
0, 0
1, 1
Table 1: The Game between Supervisor and Worker
The supervisor (P) is the row player and the worker (W) is the column player.
Both have to choose an effort level in {0, 1}, to be interpreted as low or high.
Suppose the worker’s effort level ultimately determines the quality of the firm’s
product and therefore the manager limits her concern to the worker’s behavior:
v(a, θ) = aW .3 Thus, the manager gets a payoff of 1 if W exerts high effort and 0
otherwise. The manager’s problem is that the supervisor has a dominant action
to adjust his effort level to the state and the worker wants to adjust his effort
level to his supervisor’s. In other words, P wants to choose aP = 1 in state 1 and
aP = 0 in state 0, and W wants to choose aW = aP regardless of the state.
Let µ1 := PrP (θ = 0) be P’s belief that the state is 0. Since P wants to match
the state, his equilibrium action for any µ1 is given by
(
0 if µ1 > 1/2
a∗P (µ1 ) =
1 if µ1 ≤ 1/2.
Let λ2 := PrW (µ1 ≤ 1/2) be W’s belief that P’s belief is less than 1/2. Since W
cares about mimicking P’s action, his equilibrium action for any λ2 is given by 4
(
0 if λ2 < 1/2
a∗W (λ2 ) =
1 if λ2 ≥ 1/2.
Given the equilibrium (a∗P (·), a∗W (·)), the manager quickly realizes that, because
prior µ0 is high, she is better off telling them everything (full information) than
telling them nothing (no information). Both subordinates play 0 all the time when
they receive no information, while they both play 1 61 of the time (and 0 the rest
of the time) when they are fully informed. So, the manager gets Ev = 0 under no
information and Ev = 16 under full information.
Once the manager reads the related literature (Aumann and Maschler (1995),
Brocas and Carrillo (2007), Benoı̂t and Dubra (2011), Lipnowski and Mathevet
3
4
In Section 7, we consider general manager’s utility functions. We keep it simple here.
Indifference is broken in the manager’s favor.
Information Design in Games
9
(2015) and especially Kamenica and Gentzkow (2011)), she thinks about public
information: she could talk to them simultaneously and induce belief µ01 = 12 with
probability 31 and µ001 = 1 with probability 23 .5 Under that new scheme, W plays 1 31
of the time and play 0 the rest of the time. The manager is quite satisfied because
her expected utility, Ev = 13 , is double what she received in the full information
case. Yet, she can do strictly better by making use of private information, as we
will see in Section 7.
3.
Framework
In this paper, for any compact metric space Y , ∆Y denotes the space of Borel
probability measures on Y , endowed with the weak*-topology, and so is itself compact and metrizable. All product spaces are endowed with the product topology
and subspaces with the relative topology. Given µ ∈ ∆Y , let supp µ denote the
support of µ, i.e., the smallest closed subset of Y with measure one under µ. For
measures on product spaces, µ ∈ ∆(A × B), margA µ is the marginal on A.
A (base) game G = (Ai , ui )i∈N describes a set of players, N = {1, . . . , n},
interacting in an environment with uncertain state of nature θ ∈ Θ (state space
Θ is assumed to be finite). Every i ∈ N has finite action set Ai ⊆ R and utility
Q
function ui : A × Θ → R, where A = i Ai is the set of action profiles. Players
have a common full-support prior µ0 ∈ ∆Θ about the state, and receive additional
information about θ from a designer.
The designer is an external agent who controls the information about the
state of nature available to the players, and otherwise does not participate in
the strategic interaction. She shares the same prior, µ0 , as the players and must
decide which information she will reveal to them about θ, before observing its
realization. The designer’s utility function is given by a continuous v : A×Θ → R.
An information design environment is a pair hv, Gi consisting of a designer’s
preference and a base game. Typically, one models information as an information
structure (S, π) (often denoted π for short) where Si is player i’s finite message
Q
space; S = i Si is the set of message profiles; and π : Θ → ∆S is the information
map. In any state θ, the message profile s = (si ) is drawn according to π(s|θ) and
Q
player i observes si . Let S−i = j6=i Sj and assume without loss that, for all i and
si ∈ Si , there is s−i ∈ S−i such that s ∈ ∪θ supp π(·|θ) (otherwise delete si ).
5
This distribution is Bayes plausible:
beliefs is the same.
1
2
×
1
3
+1×
2
3
= 56 . The distribution of W’s first-order
10
L. Mathevet, J. Perego, I. Taneva
The designer chooses the information structure (the only information received
by the players) and, in doing so, commits ex-ante to disclosing information that
she will learn in the future. Kamenica and Gentzkow (2011) and Bergemann and
Morris (2015) have discussed this assumption extensively. One can think of an
information structure as an experiment concerning the state, such as an audit, a
stress test, or a medical analysis, chosen by the designer in ignorance of the state
and whose results will be revealed to the players accordingly.
Given prior µ0 and information structure (S, π), every player i forms posterior
beliefs µi : Si → ∆(Θ × S−i ) about the state and other players’ messages.6 Given
this, an information structure is said to be: public if for all s ∈ S, margΘ µi (·|si ) =
margΘ µj (·|sj ) for all i and j and margS−i µi = δs−i (the Dirac measure centered at
s−i ) for all i; private if it is not public; uninformative if margΘ µi (·|si ) = µ0 for all
s ∈ S and i ∈ N ; informative if it is not uninformative.
Once the designer has chosen an information structure, the pair hG, (S, π)i
defines a Bayesian game, in which players use strategies σi : Si → ∆(Ai ) and
play a Bayes Nash equilibrium (BNE). We extend ui and v to mixed actions by
Q
taking expectations. Let Σi be player i’s strategy set and let Σ = i Σi . Since the
game and the information structure are assumed to be finite, Σ is compact in the
natural topology.
Definition 1. A Bayes Nash equilibrium of hG, (S, π)i is a distribution γ ∈ ∆(A×
Θ) such that there exists σ ∈ Σ such that
(i) γ(a, θ) =
PQ
s
i σi (ai |si )π(s|θ)µ0 (θ)
(ii) supp σi (si ) ⊆ argmax
ai
X
for all (a, θ) and
ui (ai , σ−i (s−i ), θ)µi (θ, s−i |si ) for all si and i.
s−i ,θ
The designer chooses an information structure assuming that players will play
a BNE. Let BNE(π) ⊆ ∆(A×Θ) be the set of BNEs under (S, π). For finite games
and finite (S, π), BNE(π) is nonempty7 and compact (by standard arguments the
set of fixed points of a continuous map is closed). Beyond equilibrium existence,
uniqueness is another important property, not usually guaranteed, unless one puts
further restrictions on the base game. When there are multiple equilibria, there is
no unambiguous way of choosing one. This gives us the opportunity to model the
6
Let π̂(θ × Ŝ) = π(Ŝ|θ)µ0 (θ) for any θ and Borel Ŝ ⊆ S. Then, for any Borel Ŝ−i ⊆ S−i ,
µi (θ × Ŝ−i |·) : Si → [0, 1] is the conditional expectation of 1{θ×Ŝ−i } conditional on si . In terms
of notation, we write µi (·|si ) in place of µi (si )[·].
7
Existence is not guaranteed in infinite games (see, e.g., Stinchcombe (2011a,b))
11
Information Design in Games
designer’s attitude toward equilibrium multiplicity by studying selection. Define a
selection rule as a nonempty-valued function fv : D ⊆ ∆(A × Θ) 7→ fv (D) ∈ D,
and consider those selection rules satisfying a natural linearity requirement: for
all D0 , D00 and 0 ≤ α ≤ 1, assume fv (αD0 + (1 − α)D00 ) = αfv (D0 ) + (1 − α)fv (D00 ).
Linearity demands that the selection criterion do not change with respect to the
subset of equilibrium distributions it is applied to. The “best” and the “worst”
equilibrium are natural linear selection criteria capturing the designer’s degree of
optimism. Letting fvπ := fv (BNE(π)), the optimistic design corresponds to the
max-rule
X
γ(a, θ)v(a, θ).
fvπ ∈ argmax
γ∈BNE(π) a,θ
If the designer is pessimistic and believes that the worst equilibrium will occur,
then the min-rule prevails and argmin replaces argmax. Other criteria satisfy linearity, such as random choice rules. From here, the value of information structure
(S, π) to the designer is given by
V (π) :=
X
fvπ (a, θ) v(a, θ),
(1)
a,θ
and the information design problem is the optimization program sup(S,π) V (π).
4.
4.1.
Preliminaries
Hierarchies of Beliefs
We first introduce standard concepts and results (see Mertens and Zamir (1985),
Brandenburger and Dekel (1993) (BD hereafter) and Chen et al. (2010)). Let
X0 = Θ and for all k ≥ 1, define inductively Xk = Xk−1 × ∆(Xk−1 )n−1 . Then let
n
o
Q
T̃i = (βk )k≥1 ∈ k≥1 ∆(Xk−1 ) : margXk−2 βk = βk−1 ∀k ≥ 2 .
Player i’s beliefs in T̃i are coherent (margXk−2 βk = βk−1 ), but he may assign
positive probability to other players’ beliefs not being coherent. To close the
model, coherency must be common knowledge among the players. To ensure
Q
it, for all i consider the homeomorphism fi : T̃i → ∆(Θ × ( k≥1 ∆(Xk−1 ))n−1 )
(Proposition 1 in BD). For ` ≥ 1, let Ti,` = {ti ∈ T̃i : fi (Θ × T−i,`−1 |ti ) = 1}
where Ti,0 = T̃i and define Ti = ∩` Ti,` to be the space of i’s hierarchies of
beliefs. Given that Θ is finite, Ti is compact metrizable. Define Tik = projk Ti
12
L. Mathevet, J. Perego, I. Taneva
Q
Q
to be the set of k-order beliefs. Let T = i Ti and T−i = j6=i Tj . From here, we
∗
k
can show the existence of a belief-preserving (i.e., margT−i
k βi = (β` )
`=1 for all k)
∗
8
homeomorphism βi : Ti → ∆(Θ × T−i ) (Proposition 2 in BD).
A belief-closed subspace is a Borel T 0 ⊆ T such that βi∗ (Θ × {t−i : (ti , t−i ) ∈
T 0 }|ti ) = 1 for all t ∈ T 0 and i. A (Harsanyi) type space is a n-tuple (Ti , φi ), where
each Ti is a space of types and each φi : Ti → ∆(Θ × T−i ) is a measurable function.
Of special interest is the type space (Ti , βi∗ ), called the universal type space. Given
prior µ0 and an information structure, recall that every i constructs posterior
beliefs µi : Si → ∆(Θ×S−i ). Note that (Si , µi ) forms a type space and every si ∈ Si
induces a hierarchy of beliefs hµi (si ) = (hµk,i (si ))k≥1 where hµ1,i (si ) = margΘ µi (si )
and, for k ≥ 2, hµk,i (si )[θ × E] = µi (si )[θ × (hµk−1,−i )−1 (E)] for all θ and Borel
k−1
E ⊆ T−i
. From here, we can define redundant information structures:
Definition 2. An information structure (S, π) is non-redundant if, given prior
µ0 , the mappings hµi are injective for all i ∈ N . Let Π denote the space of all
non-redundant information structures.9
Non-redundancy demands that distinct messages induce distinct hierarchies.
In most of the paper, we assume that the designer uses non-redundant information structures, because redundancy is well-known to interfere in the relationship
between information and beliefs under BNE. The interested reader should go to
Section 8.1 for details. In that section, we re-incorporate redundancy by working
with a notion of correlated equilibrium instead of BNE.
4.2.
Random Posteriors
Given an information structure, any realized θ leads to a realized message profile
s = (si ) (according to map π(·|θ)), which, in turn, leads players to form hierarchies
of beliefs. As the state is ex-ante uncertain, an information structure induces a
distribution over players’ hierarchies of beliefs. These distributions are called
random posteriors. Let ∆T be the set of all random posteriors. To be precise,
let hµ : s 7→ (hµi (si )) and say that an information structure (S, π) induces random
P
posterior τ if τ (t) = θ π((hµ )−1 (t)|θ)µ0 (θ) for all t ∈ supp τ . In this definition,
(hµ )−1 (t) is the set of messages that produce hierarchy profiles t and, thus, the
When no confusion results, we use the same symbol βi∗ for the marginals on T−i or Θ. That
P
is, for any Borel T̂−i ⊆ T−i , we write βi∗ (T̂−i |ti ) instead of θ βi∗ (θ × T̂−i |ti ) and βi∗ (θ|ti ) instead
of βi∗ (θ × T−i |ti ).
9
Take S̄ that has at least the cardinality of the universal type space and choose finite S ⊆ S̄.
8
Information Design in Games
π(·|0) s1
s1
s2
1
0
s2
0
0
π(·|1) s1
s1
s2
13
s2
1
2
0
0
1
2
Table 2: An (Public) Information Map
rhs gives the probability of t under π. For notation purposes, the marginal of τ
on Ti will be denoted τi = margTi τ .
In the binary state space Θ = {0, 1}, the information structure ({s1 , s2 }2 , π)
defined in Figure 2 induces τ = 43 t1/3 + 14 t1 where tµ is the profile of belief hierarchies in which all players have first-order belief µ := prob(θ = 1) and this
is commonly believed among them. Indeed, note that prob(s = (s1 , s1 )) = 34 ,
prob(s = (s2 , s2 )) = 41 , and a player receiving message s` has beliefs (2` − 1)/3
that θ = 1 and is certain the other player also received s` .
5.
Theory
The information design problem is cast as a choice of information structure, but
the universe of beliefs is most instructive to the designer. For example, the manager in Section 2 does not care about how she informs her subordinates per se,
as long as she can manipulate P’s first-order beliefs and W’s second-order beliefs.
This perspective is in line with the fact that every information structure induces
a random posterior. In the world of beliefs, the random posterior becomes the
star concept and the object of choice. Of course, the designer does not actually
choose a random posterior, but it is as if she did—and if she chooses information
without understanding beliefs, then she cannot really understand the role of information. The representation theorem is the expression of the belief perspective on
information design. This section introduces the constituents of the theorem and
the result assembles them in a representation of optimality.
5.1.
Consistent Random Posteriors
The class of consistent random posteriors plays a special role in the analysis. Let
n
C = τ ∈ ∆T : |supp τ | < ∞, and ∃p ∈ ∆(Θ × T ) s.t. margT p = τ
o
and p(θ, t) = βi∗ (θ, t−i |ti )τi (ti ) ∀i, θ, t ∈ supp τ
(2)
14
L. Mathevet, J. Perego, I. Taneva
be the space of consistent random posteriors. A random posterior is consistent
if it is the marginal on T of a measure p whose conditional on ti yields i’s beliefs
βi∗ (·|ti ) for any i and ti . In the literature, p is often referred to as a “common
prior.” For any consistent τ , denote by pτ the distribution p in (2) (which is
unique due to finite support and Mertens and Zamir (1985)).
For any τ, τ 0 ∈ C, say τ ⊆ τ 0 if supp τ ⊆ supp τ 0 . Then, a consistent random posterior is defined as minimal, the set of which is denoted C M , if supp τ
contains no proper belief-closed subspace. By basic inclusion arguments, C M 6= ∅,
which Proposition 1 below establishes indirectly. Now, we illustrate minimality
for standard families of information.
Definition 3. A random posterior τ ∈ C is: public if all t ∈ supp τ t1i = t1j
and tki = δtk−1 for all i, j and k ≥ 2 (δ is the Dirac measure);10 conditionally
−i
P
Q
independent if there exists µ such that τ (t) = θ µ(θ) i pτ (ti |θ) for all t ∈ supp τ .
A random posterior is public if all players have equal first-order beliefs and this
is common knowledge. A conditionally independent random posterior is one for
which hierarchies are independent conditionally on the state. Hence, the correlation between beliefs is a function of how informative the random posterior is about
the state. A random posterior τ ∈ C is perfectly informative if for all t ∈ supp τ ,
βi∗ (θ|ti ) = 1 for all i and some θ. For public and conditionally independent random
posteriors, minimality means the following.
Proposition 1. (a) Suppose τ ∈ C is conditionally independent. If µ = margΘ pτ
is not degenerate, τ is minimal iff it is not perfectly informative. If µ is degenerate,
τ is minimal. (b) A public τ ∈ C is minimal iff supp τ is a singleton.
5.2.
The Representation Theorem
Given random posterior τ , a BNE of hG, τ i is a distribution γ ∈ ∆(A × Θ) such
that there exists σ ∈ Σ such that
γ(a, θ) =
PQ
t
i σi (ai |ti )pτ (t, θ)
for all (a, θ) and
supp σi (ti ) ⊆ argmax
ai
10
X
ui (ai , σ−i (t−i ), θ)βi∗ (θ, t−i |ti )
θ,t−i
Here, we have made use of the coherency condition to write the k-order beliefs tki .
Information Design in Games
15
for all ti ∈ supp τi and i. Let BNE(τ ) denote the set of BNEs under τ , from
which fvτ := fv (BNE(τ )) represents the selected equilibrium. The designer’s ex
ante expected payoff can then be written as a function of the random posterior
X
w : τ 7→
fvτ (a, θ) v(a, θ).
(3)
θ,t
When the designer evaluates her expected payoff from τ , she is always better
informed about θ than the players, because she uses all the hierarchies (t1 , . . . , tn )
to form her own belief about θ. Under public information or when there is a single
agent, this differential disappears and the designer’s first-order belief coincides
with that of the players or the agent.
Here is the main theorem of the paper.
Theorem 1 (Representation Theorem). The designer’s maximization problem can
be represented as
X
max V (π) = max
w(e)λ(e)
(S,π)∈Π
λ∈∆(C M )
subject to
e
X
(4)
margΘ pe λ(e) = µ0 .
e
The designer maximizes her expected utility as if she were optimally mixing
over minimal consistent random posteriors, subject to prior beliefs averaging to µ0
across these random posteriors. Every (minimal consistent) random posterior is a
universe of its own in which some equilibrium occurs and, in this representation,
it has a value given by the designer’s utility evaluated in equilibrium. Every such
random posterior also has a prior µ, and the “further” µ is from µ0 , the costlier it
is in some sense to use that random posterior. The constraint in (4) can therefore
be seen as a form of budget constraint.
The designer should a priori contemplate all (finite-support) random posteriors
in ∆T , but the theorem narrows down the focus to specific random posteriors: the
minimal consistent random posteriors satisfying a form of Bayes’ plausibility. We
know that every player’s first-order beliefs must be equal to µ0 on average, which
is known as Bayes’ plausibility (see KG). Every player knows this, hence every
player knows that others’ first-order beliefs are equal to µ0 on average, that others
know that his first-order beliefs are equal to µ0 on average, and so on, so that
Bayes’ plausibility must in fact be common knowledge. In particular, any player
i’s expectation of any j’s first-order beliefs must also on average equal µ0 , and
16
L. Mathevet, J. Perego, I. Taneva
so on. Still, this can violate consistency. For example, in the environment with
Θ = {0, 1}, n = 2 and µ0 = 1/2, the random posterior τ = 12 t + 12 t0 where
t = (t1 , t2 ) is the pair of hierarchies
player 1 believes that θ = 0 and player 2 believes that θ = 1 and that
joint event is commonly known by the players
and t0 = (t01 , t02 ) is the pair of hierarchies
player 1 believes that θ = 1 and player 2 believes that θ = 0 and that
joint event is commonly known by the players
satisfies common knowledge of Bayes’ plausibility. Indeed, Bayes’ plausibility holds
for every player under τ and {t, t0 } is a belief-closed subspace. However, τ is clearly
not consistent and for this reason is discarded by the theorem. The intuition is
that no information structure can induce an inconsistent random posterior and all
(Bayes’ plausible) consistent random posteriors can be induced by some information structure (Proposition 7 in the appendix).
Since even common knowledge of Bayesianism does not suffice, the designer
should be contemplating consistent random posteriors. If so, the theorem says
that she may as well contemplate the minimal consistent ones and distributions
thereof. To see why, define a convex combination between any e, e0 ∈ C M ,
αe + (1 − α)e0 ∈ ∆(supp e ∪ supp e0 ) (0 ≤ α ≤ 1)
as a probability distribution over {e, e0 }. Unless e = e0 , the random posterior
αe + (1 − α)e0 so formed is not minimal. It turns out that C is convex (Lemma 1
in Appendix B) and has extreme points that coincide with the minimal consistent
random posteriors (Lemma 2 in Appendix B); and that the designer’s payoff in
(3) is linear (Lemma 4 in Appendix B). From here, the focus on minimal random
posteriors and measures thereof is an extremal representation result (Proposition
8 in Appendix B).
In the one-agent case, C M ∼
= ∆Θ, that is, the set of minimal consistent random
posteriors is “equal” to the set of first-order beliefs of the agent. Thus, once in a
minimal subspace, there can be only one realization of first-order beliefs. This is
no longer true in games, for e ∈ C M may contain many hierarchies of beliefs and a
given player can have different first-order beliefs across hierarchies. The theorem
offers a Bayes’ plausibility condition
X
margΘ pe λ(e) = µ0
e
Information Design in Games
17
which is akin to a double average. The average first-order beliefs within every
minimal random posterior, {margΘ pe : e ∈ C M }, must on average equal the prior.
But which player’s first-order beliefs should we look at within and across minimal
subspaces? By consistency, it does not matter. If it is true for one player, then it
will be for all.
Constrained Representation. In general, the designer may not have the ability
or the permission to generate all possible (consistent) random posteriors. In effect,
she is then restricted to C 0 ⊆ C. Theorem 1’ deals with this case. In applied work,
for example, the designer is often restricted to a subset of information structures
Π0 ⊆ Π, public or conditionally independent information structures being the most
common restrictions.11 If ρ : (S, π) 7→ τ denotes the map that gives the (unique,
admissible) random posterior τ induced by a given (S, π),12 then C 0 = ρ(Π0 ).
Given C 0 and µ, let A(C 0 , µ) := {τ ∈ C 0 : margΘ pτ = µ} denote the consistent
random posteriors in C 0 with prior µ and assume it is nonempty for all µ. Say that
a convex subset C 0 of C is a face if τ 0 ∈ C 0 and τ ⊆ τ 0 imply τ ∈ C 0 .13
Theorem 1’. Suppose C 0 ⊆ C is a face. Then,
X
max
w(τ
)
=
max
w(e)λ(e)
0
τ ∈A(C ,µ0 )
λ∈∆(C M ∩C 0 )
subject to
e
X
(5)
margΘ pe λ(e) = µ0 .
e
The constrained analog to the representation theorem shows how constraints
can be incorporated in the analysis. As long as constraints take the form of a face
of C, the same lessons apply. It is as if the designer was mixing optimally over the
minimal random posteriors in C 0 in a way that satisfies Bayes’ plausibility. The
unconstrained version follows by setting C 0 = C. As an example, the set of public
random posteriors is a face of C, so the result applies. Likewise, although the set of
conditionally independent random posteriors is non-convex, we can still maximize
over the convex hull of that set by mixing over its extreme points, which are,
11
Public information is realistic in various contexts. For example, a financial institution disclosing information to its clients cannot, by law, tailor the type of information it discloses to the
type of clients . In marketing, personalized advertisement is difficult and public information is
often a reasonable approximation.
12
This map is well-defined by Proposition 7 in the Appendix.
13
The standard definition is that a face F of a convex set X is a nonempty convex subset of
X with the property that if x, y ∈ X, α ∈ (0, 1) and αx + (1 − α)y ∈ F , then x, y ∈ X. By
Proposition 8 in Appendix B, both definitions are equivalent here.
18
L. Mathevet, J. Perego, I. Taneva
by definition, the conditionally independent random posteriors. The theorem can
easily be extended to any convex C 0 ⊆ C, but then the extreme points of C 0 may
not coincide with those of C. If those extreme points are difficult to characterize,
the theorem loses its appeal.
6.
Implementation
The representation theorem places the information design problem in the world of
beliefs. Beyond its conceptual contribution, the theorem can also be implemented,
especially if the number of options faced by the designer is not unreasonably large.
From a pragmatic perspective, the theorem does reduce the problem from information structures to consistent random posteriors14 and then focuses attention
on the minimal ones, but the minimal ones are plenty. And if the designer contemplates all the minimal random posteriors that she might ever need, given any
group of players she might face, any underlying game they might play, given any
preferences that she might have about the outcomes of that game, and given any
prior she might have, then she will have to contemplate all of them. This is the
following result.
Proposition 2. For any minimal random posterior e ∈ C M , there exist an environment hG, vi and a prior µ0 ∈ ∆Θ for which λ∗ = δe is the essentially15 unique
optimal solution.
By choosing a constant game, it is easy to make all minimal random posteriors
optimal since the designer is indifferent between them all. Although uniqueness
ties our hands considerably, it is still the case that every minimal random posterior
is the (essentially) unique optimal solution in some environment. This delivers a
resonant message. If the designer wants to carry out the representation theorem
and face a manageable set of minimal random posteriors, she ought to use the
specifics of the environment to first trim C M , namely her own preference v and
the game G. Fortunately, this can be done by standard arguments, akin to the
Revelation Principle, or more specialized reduction arguments.
14
When redundant information is allowed, this reduction can be drastic because there exist
infinitely many information structures that induce every given random posterior (see Section
8.1).
15
A minimal random posterior e is the essentially unique optimal solution if for all > 0, there
is a game G such that all e0 ∈ C M with d(e, e0 ) > are strictly suboptimal.
Information Design in Games
6.1.
19
Primal Decomposition
To better understand the representation theorem and implement it, the maximization problem in (4) or (5) can be decomposed into smaller problems that can be
solved separately and then re-assembled. This process broadly separates the value
of public and of private information, delivers a concave-envelope representation of
optimality, and points to directions for reducing the dimensionality of the problem. In the next result, we make use of Eµ := {e ∈ C M : margΘ pe = µ}, the set of
minimal (consistent) random posteriors with prior µ ∈ ∆Θ.
Corollary 1 (Private–Public Information Decomposition). Fix an environment
hv, Gi and suppose C 0 ⊆ C is a face. For any µ and Cµ∗ ⊆ Eµ ∩ C 0 such that
w(Cµ∗ ) = w(Eµ ∩ C 0 ), let
w∗ (µ) = max∗ w(e).
(6)
e∈Cµ
If w∗ : ∆Θ → R is well-defined and upper semi-continuous, then the designer’s
maximization problem over C 0 can be represented as
X
w∗ (µ)λ(µ)
max
w(τ
)
=
max
0
τ ∈A(C ,µ0 )
λ∈∆∆Θ
subject to
supp λ
X
(7)
µλ(µ) = µ0 .
supp λ
The representation theorem can be decomposed in two parts.16 First, there is a
maximization within, given by (6), taking place among the minimal subspaces
with equal average prior beliefs. Among them, the maximization is not subject
to further constraints, since all subspaces are “equidistant” to µ0 . The corollary
points to a simple observation: without loss, we can maximize over any subset
Cµ∗ of Eµ ∩ C 0 that is payoff-equivalent to Eµ ∩ C 0 . This observation is simple
but important, because it invites us to use the specifics of the problem—without
which, as we know, C M cannot be reduced further and the problem might not be
tractable. At this level of generality, it is not possible to name a useful Cµ∗ for all
problems, but this can be done for specific problems. Some examples follow:
(a)(One-agent or Public Information). In those situations, maximization within
is trivial because Cµ∗ is a singleton, hence the problem comes down to concavification in the maximization between.
16
Decomposition is common practice in optimization theory (see Bertsekas (1999)).
20
L. Mathevet, J. Perego, I. Taneva
(b) (Multiple-agent Problems). In the Supplement, we study the following
multiple-agent problems. Say Θ = {0, 1} and each i ∈ {1, . . . , n} has one unit of
income that he can use to purchase a good. If i makes no purchase (a = 0), his
utility is ui (a, θ) = 1 for all θ. If he does (a = 1), then his utility is u(1, θ) > 1
if θ = 1 and 0 if θ = 0. This scenario is a non-trivial departure from KG when v
is not additively-separable, and is a central scenario in the Cheap Talk literature
P
with multiple receivers.17 There, we show that if v(a, θ) = ṽ( i ai ) and ṽ : R → R
is convex, then Cµ∗ = {τ ∈ Eµ : τ is public}. Thus, the problem essentially comes
down to maximization between. This is not the case when v is concave, because
the designer will benefit from private information. In general, maximization within
will play an important role when v is concave.
(c) (Manager’s Problem). Section 7 gives a detailed analysis.
(d) (Beauty Contest). In the Supplement, we study the well-known beauty
contest (as in Morris and Shin (2002), Angeletos and Pavan (2007), Bergemann
and Morris (2013), etc) and provide a random posterior perspective.18 In particular, we show that if the designer has polynomial preferences of degree 2 and is
concerned with conditional independence, then the set of binary conditionally independent (minimal) random posteriors is sufficient: Cµ∗ = {τ ∈ EµCI : |supp τ | = 2}.
For more general designers, we also illustrate the idea that, when maximization
within remains difficult in an environment hv, Gi, for one because it may be difficult
to find a manageable payoff-equivalent set Cµ∗ , we may be able to bound w∗ from
above and below, by values of the maximization within in related environments,
say hv 0 , G0 i and hv 00 , G00 i, for which it is easy to name a small payoff-equivalent Cµ∗ .
Then, we can compute w0 and w00 such that w0 (·) ≥ w∗ (·) ≥ w00 (·). It turns out
that w0 and w00 take the form of bi concave envelopes.
Second, there is a maximization between that patches together the minimal
subspaces that are solutions to maximizations within. This step is akin to a public
signal, sending players to an optimal minimal subspace (their presence in that
subspace being common knowledge). The corollary delivers a concave-envelope
characterization of optimal information design. Let
(cav w∗ )(µ) = inf{g(µ) : g concave and g ≥ w∗ }
17
(8)
In that literature, much attention has been devoted to receivers “interacting” with the sender
but not with one another (e.g., Farrell and Gibbons (1989)).
18
For simplicity, we study a two state and two player version of the game, but the approach
applies more broadly.
Information Design in Games
21
be the concave envelope of w∗ evaluated at µ. The concave envelope is the smallest
concave function that majorizes w∗ . It follows from standard arguments, as in
Rockafellar (1970, p.36), that the rhs of (7) is one of many equivalent definitions
or characterizations of the concave envelope of function w∗ . Sums replace integrals
by Caratheodory’s theorem, reducing again the set of random posteriors to be
considered. This step is familiar to the readers of KG. In the one-agent case,
|Eµ | = 1 for all µ and, thus, the theorem comes down to maximization between
(Kamenica and Gentzkow (2011, Corollary 1)). For information design problems
with many players, the corollary shows that concavification is one of the two steps
toward optimality.
6.2.
On the Structure of the Set of Minimal Random Posteriors
In a given game, not all minimal random posteriors will necessarily be relevant.
The manager’s problem is an example of this. Surely, the fewer the relevant
minimal random posteriors are, the more powerful the representation theorem.
The one-agent case is a good illustration of this: since there is a unique minimal
random posterior for each µ, max within is immediate and max between alone
achieves optimality. When the set of relevant minimal random posteriors at µ is
too “rich,” max within can be complicated and max between weakened. To make
this clear, we explore two ways in which minimal random posteriors could be rich,
a measure-theoretic one and a topological one, then draw some implications.
In a measure-theoretic sense, the set of minimal random posteriors, being extreme points of C, ought to be “small” within that set. In infinite dimensional
spaces, however, such as C or A(C, µ), there is no analog of Lebesgue measure.19
In response, Christensen (1974) and Hunt (1992) have developed the notions of
shyness to capture the idea of Lebesgue measure 0.20 Here, we use the convenient notion of finite shyness proposed by Anderson and Zame (2001), which is a
sufficient condition for a set to be shy.
Definition 4. A measurable subset A of a convex subset C of a vector space S
is finitely shy if there exists a finite dimensional vector space V ⊆ S for which
19
No infinite dimensional Banach space admits any translation invariant measure that assigns
finite, strictly positive measure to each open set.
20
For example, the countable union of shy sets is shy, no relatively open subset is shy, prevalent
sets (i.e., sets whose complement is shy) are dense, and a subset of Rn is shy in Rn if and only
if it has Lebesgue measure 0.
22
L. Mathevet, J. Perego, I. Taneva
λV (C + s) > 0 for some s ∈ S and λV (A + s) = 0 for all s ∈ S, where λV is the
Lebesgue measure defined on V .
Proposition 3. C M is finitely shy in C.
Although the set of minimal random posteriors is small in a measure-theoretic
sense, it is large in a topological sense. The minimal random posteriors are dense
in the set of consistent random posteriors.
Proposition 4. Let n > 1. For all µ, Eµ and A(C, µ)\Eµ are dense in A(C, µ).
Any non-minimal random posterior can be approximated arbitrarily well by minimal ones. Thus, absent any restrictions (i.e., C 0 = C) or reductions (i.e., Cµ∗ = Eµ ),
max within always gets us arbitrarily close to the optimal value,21 in which case
max between plays nearly no role at all. This reaffirms in different terms the
point already made in Proposition 2 that implementation can be difficult under
all minimal random posteriors. In other words, the implementation corollary will
be most useful after reductions or restrictions. There are various ways to do this:
the Revelation Principle is a standard reduction, and some restrictions are widely
used in applied work, such as conditional independence and public information.
With reductions or restrictions, max within no longer approximates max between in general. For example, no public random posteriors—except full informa
tion—can be approximated by a sequence of conditionally independent random
posteriors.22 That is, under the standard restriction to conditional independence
and public information, max between will often be necessary to achieve optimality. The manager’s problem is also interesting to this respect, because the
environment will allow us to work in a space of truncated hierarchies in which,
without reductions or ad hoc restrictions, the set of minimal random posteriors is
small topologically, so that both max within and between (concavification) play
an important role.
7.
The Manager’s Problem Solved
In the manager’s problem, intuition suggests that only P’s first-order beliefs and
W’s second-order beliefs should matter to the manager. This intuition is true as
21
Technically, sup should replace max in (6).
For example, consider τ = 34 t1/3 + 41 t1 and look at Table 2. Under conditional independence
(noting that conditionally independent random posteriors are generically minimal by Proposition
1), both matrices in Table 2 would be product distributions, in which case entries in one diagonal
could not approach strictly positive numbers while entries in the other approach 0.
22
Information Design in Games
23
long as the manager’s utility is of the form v : A → R. In general, there are
subtle reasons why a state-dependent manager might want to exploit both of her
subordinates’ first and second-order beliefs. Let us briefly convey the intuition
behind this here, and then focus on v : A → R for the remainder of the section.
Let µ0 = 1/2 and suppose the manager says nothing to P while fully informing
W. Since P is indifferent, he could decide to mix between effort levels with equal
probability. Since W knows that P has learned nothing, P’s mixing makes him
indifferent between exerting high or low effort. In particular, W could play 1
when the state is 1 and 0 when the state is 0—since he is fully informed, he can
do this. In this BNE, W’s first-order beliefs drives his action, in a way that would
please a manager wanting her subordinates to align their effort choice to the state.
Although these BNEs exist, no state-independent manager would need to exploit
them.
Consider finite-support distributions η over P’s first-order beliefs and W’s
second-order beliefs,23
A := {η ∈ ∆(∆Θ × ∆∆Θ)}.
Second-order beliefs technically include a first-order belief (Section 4.1), but here
it will be enough to define W’s second-order beliefs as elements of ∆∆Θ instead
of ∆(Θ × ∆Θ). Refer to P’s first-order beliefs as µ1 ∈ ∆Θ and W’s second-order
beliefs as λ2 ∈ ∆∆Θ. Therefore, η is a joint distribution over pairs (µ1 , λ2 ).
Denote η1 := margµ1 η and η2 := margλ2 η. In what follows, we abuse terminology
and refer to η as a random posterior while we mean a random posterior with
marginal η over (µ1 , λ2 ).
The next proposition characterizes consistency in A. Given first-order beliefs
of P and second-order beliefs of W, the condition guarantees the existence of a
joint distribution over those pairs of beliefs, such that Bayesian updating leads
W to the specified truncated second-order beliefs. Since η does not specify the
second-order beliefs of P, ensuring consistency of the second-order beliefs of W is
sufficient to guarantee consistency of the random posterior.
Proposition 5. A random posterior η ∈ A is consistent if and only if η(µ1 , λ2 ) =
η2 (λ2 )λ2 (µ1 ) for all (µ1 , λ2 ) ∈ supp η.
As far as distributions over equilibrium action profiles are concerned, we can
work with consistent random posteriors in A only, because they generate all such
23
Finite support is sufficient since we have finitely many actions. We will later show that we
need at most four points in the support to generate any BNE distribution over action profiles.
24
L. Mathevet, J. Perego, I. Taneva
distributions. To establish this, we first define what an equilibrium is in this world
of truncated hierarchies. In the following, we index the actions and strategies of
P by 1, and those of W by 2. Given η ∈ A, a BNE of hG, ηi is a distribution
γ ∈ ∆(A × Θ) such that there exists σ with σi : supp ηi → ∆({0, 1}), i = 1, 2,
such that
X
γ(a, θ) =
η(µ1 , λ2 )σ1 (a1 |µ1 )σ2 (a2 |λ2 )
µ1 ,λ2
for all (a, θ) and
supp σ1 (µ1 ) ⊆ argmax
a1
X
u1 (a1 , σ2 (λ2 ), θ)µ1 (θ)
θ
for all µ1 ∈ supp η1 and
supp σ2 (λ2 ) ⊆ argmax
a2
X
u2 (σ1 (µ1 ), a2 , θ)λ2 (µ1 )
µ1
for all λ2 ∈ supp η2 .
Proposition 6. For any γ ∈ ∪τ BNE(τ ), there exist γ 0 ∈ ∪η BNE(η) such that γ
and γ 0 generate the same distribution over A, i.e., margA γ = margA γ 0 .
The proof of this proposition shows that the designer can use random posteriors
η with at most two first-order beliefs for P and two second-order beliefs for W,
η
λ02
λ002
µ01
λ02 η2
λ002 (1 − η2 )
µ001
(1 − λ02 )η2
(1 − λ002 )(1 − η2 )
where λ2 (µ01 ) = λ2 , and η2 (λ02 ) = η2 . Having two distinct beliefs per player in this
game is enough to generate all equilibrium distributions; thus, the 2 × 2 random
posteriors η are all the manager needs to maximize her expected payoff. Notice
that the expression of η above guarantees consistency.
On the way to the representation, there remains to identify the minimal random
posteriors within the class of consistent and sufficient ones (2×2) in A. It becomes
evident that every consistent 2 × 2-η can be reproduced by a convex combination
of some η 0 and η 00 given as
Information Design in Games
η0
λ02
η0
λ002
µ01
λ02
µ01
λ002
µ001
1 − λ02
µ001
1 − λ002
25
showing that the 2 × 1 and the 1 × 1 random posteriors form the set of minimal
random posteriors in A. Again, consistency of W’s second-order beliefs is already
incorporated into η 0 and η 00 . From η, η 0 and η 00 , it is clear that η = η2 η 0 +(1−η2 )η 00 ,
meaning that η can be reproduced by sending both P and W to η 0 with probability
η2 and to η 00 with probability 1 − η2 .
The minimal random posteriors are such that either the manager talks to
both P and W simultaneously and minimally (these correspond to minimal public
random posteriors, necessarily of dimension 1×1 by Proposition 1) or the manager
informs P privately but says nothing further to W (these correspond to random
posteriors of dimension 2 × 1). This does not mean that the manager will never
inform W in optimum; however, W is never informed more than P. In particular,
the manager informs both brothers publicly about the minimal subspace she is
sending them to, but beyond that, she either says nothing further or talks to P
privately. Therefore, W only receives, if anything, the public information used in
combining the minimal random posteriors as part of the maximization between.
Representation Theorem in the Manager’s Problem The manager’s maximization problem can be represented as maximization within
X
v a∗1 (µ1 ), a∗2 (λ2 ) λ2 (µ1 )
w∗ (µ) = max
λ2 ∈∆∆Θ
s.t.
X
supp λ2
µ1 λ2 (µ1 ) = µ
(9)
supp λ2
and then maximization between
w∗ (µ0 ) =
s.t.
max
η2 ∈∆Θ
X
X
w∗ (µ)η2 (µ)
supp η2
µ η2 (µ) = µ0 .
(10)
supp η2
In the maximization within, the manager informs P optimally by choosing his
distribution of first-order beliefs, which is equivalent to the second-order beliefs
of W in that minimal subspace. In the maximization between, the manager then
26
L. Mathevet, J. Perego, I. Taneva
informs W optimally by choosing his distribution of second-order beliefs, η2 . This
distribution can also be interpreted as a distribution over priors µ of minimal
subspaces. While maximization between takes the form of a concave envelope, it
is not the case of maximization within, because λ2 enters the objective function
directly through a∗2 . In this problem, both maximizations are tractable, aided by
the binary feature of the optimal solution.
7.1.
An Illustration
Consider the manager v(a, θ) = aW from the motivating example. With this
objective in mind, she wants to make sure that W believes it more likely that P will
play 1 rather than 0, because then W will follow suit. To formalize this, consider
two possible first-order beliefs for P: µ01 ≤ 21 and µ001 > 12 . Given P’s incentives
of mismatching the state, his action choices are a∗P (µ01 ) = 1 and a∗P (µ001 ) = 0.
Denote W’s second-order belief by λ2 = λ2 (µ01 ). That is, λ2 is the probability
that W assigns to P having a first-order belief weakly less than 21 . Since W’s only
incentive is to match P’s action, W’s action choices are determined by his beliefs
about P’s first-order beliefs as follows: a∗W (λ2 ≥ 1/2) = 1 and a∗W (λ2 < 1/2) = 0.
The manager’s payoff can be written as:
(
1 if λ2 ≥ 1/2
v(a∗W (λ2 )) =
0 if λ2 < 1/2
where ties are broken in her favor. From here, the optimal random posterior can
be computed by solving the maximizations within and between.
Maximization Within.
In this example, (9) becomes
w∗ (µ) =
s.t.
max 1{λ2 ≥1/2}
λ2 ∈∆∆Θ
µ01 λ2 + µ001 (1 − λ2 )
=µ
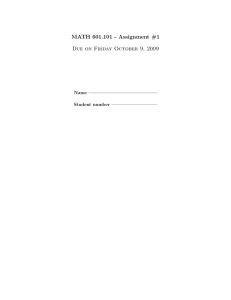
This is simple to solve (see Figure 1). When µ ≤ 1/2, 1{λ2 ≥1/2} is maximized
by choosing µ01 = µ001 = µ, so that λ∗2 = 1. Both P and W will choose action 1,
just acting under the prior belief, and so the manager’s payoff is maximal under
silence: w∗ (µ) = 1{λ∗2 ≥1/2} = 1. The optimal minimal subspace is public with no
information revealed to either player.
When 3/4 ≥ µ > 1/2, 1{λ2 ≥1/2} is maximized by choosing µ01 = 12 and µ001 = 1,
so that λ∗2 = 2(1 − µ). In this region, the manager once again achieves maximal
27
Information Design in Games
payoff, w∗ (µ) = 1{λ∗2 ≥1/2} = 1, this time by using private partial information to P
only. The optimal minimal subspace is
e∗µ
µ01 =
λ2
1
2
2(1 − µ)
µ001 = 1
2µ − 1
When µ > 34 , it is no longer possible to satisfy the constraint with λ2 ≥ 1/2.
That is, if the manager gives no further information to W, he will choose to play
action 0. In this region, the manager’s payoff is w∗ (µ) = 0 in every minimal
subspace.
w∗ (µ)
1
Information
to both
Private to P
Silence
µ
1
2
3
4
1
Figure 1: Value of maximization within (dashed) and between (solid).
Maximization Between.
In the region where µ0 ∈ ( 34 , 1], randomization between minimal subspaces
increases the manager’s expected payoff. The optimal randomization is given the
concave envelope of w∗ (solid line in Figure 1).
For any µ0 ∈ ( 34 , 1] the manager maximizes her expected payoff by randomizing
between e∗3/4 and e∗1 . In this range, it is optimal to send both brothers to e∗3/4 with
probability 4(1 − µ0 ), and to e∗1 with probability 4µ0 − 3. When in e∗3/4 , it is an
equilibrium for both brothers to play 1, and when in e∗1 the only equilibrium is for
both to play 0. Through this randomization, the manager achieves an expected
payoff of w∗ (µ0 ) = 4(1 − µ0 ).
28
L. Mathevet, J. Perego, I. Taneva
As an example, consider µ0 = 56 . The solution above tells us to send both
agents to e∗3/4 with probability 23 , and both agents to e∗1 with probability 13 . The
resulting non-minimal random posterior is given by
λ02 = 0 λ002 =
η
µ01 =
1
2
0
µ001 = 1
1
3
1
2
1
3
1
3
which results in an expected value to the designer of w∗ ( 65 ) = 4(1−µ0 ) = 23 . Notice
that this random posterior is admissible: it was generated by a randomization over
two minimal subspaces, which were themselves admissible, and the priors of which
average to µ0 .
8.
8.1.
8.1.1.
Discussion
Redundant Information
Justification for Non-Redundancy
To understand what is at stake, consider a simple example. Let Θ = {0, 1} and
µ0 := 21 . Each player can invest (I) or not invest (NI), and the payoffs are given
in Table 3.
0
I
NI
1
I
NI
I
NI
1, 1
0, −2
−2, 0
0, 0
I
NI
2, 2
0, 1
1, 0
0, 0
Table 3: An Investment Game
Let S1 = S2 = {0, 1}. In information structure (S, π 1 ), π 1 (0|θ) = 1 for all θ,
so that the same message is sent in all states. In information structure (S, π 2 ),
1
3
π 2 (1, 1|θ) = 16
, π 2 (1, 0|θ) = 0, π 2 (0, 1|θ) = 16
, and π 2 (0, 0|θ) = 43 for all θ.
Both information structures are completely uninformative about θ and induce the
same random posterior: with probability 1, each player has first-order beliefs µ0
and this is commonly believed among them. Under (S, π 1 ), there are two BNEs:
1
γ∗1 (I, I|θ) = 1 for all θ and γ∗∗
(NI, NI|θ) = 1 for all θ. Under (S, π 2 ), the pair
Information Design in Games
29
of strategies in which every player invests iff he receives message 1 induces BNE
γ∗2 (·|θ) = π 2 (·|θ). This equilibrium does not exist under (S, π 1 ).
The problem raised by the example is that both (S, π 1 ) and (S, π 2 ) induce
the same random posterior but they do not have the same set of BNEs. Indeed,
(S, π 2 ) is redundant and redundancy is known to cause these discrepancies (e.g.,
Liu (2009)). So, a random posterior approach based on BNE cannot capture
redundant information.
Clearly, we can either assume non-redundant information and work with BNE
or work with a different solution concept and incorporate redundant information.
We first argue that non-redundant information can be a reasonable assumption,
then we use a notion of correlated equilibrium to recover redundant information in
the next section. The designer has the monopoly of information, but she does not
have the monopoly of correlation,24 since any random event can serve as correlating
device among the players, from the weather to the daily lottery. While players are
aware that the designer manipulates their beliefs, one can argue that the desire
to listen is greater when the messages are informative about the topic at hand
(that is, θ) or about the other players’ information (that is, s−i ), than when the
messages have nothing to do with both. In (S, π 2 ), players receive messages known
to be manipulative and completely uninformative.
8.1.2.
Incorporating Redundant Information
Incorporating redundant information structures in our analysis is appealing, because our approach lets us work with random posteriors instead of information
structures. And there are infinitely many (necessarily redundant) information
structures inducing every random posterior. Hence, the representation theorem
reduces drastically the set of objects to consider. As we will see, incorporating
redundancy is only a matter of solution concept.
Definition 5. Given random posterior τ ∈ C, a correlated equilibrium is a distribution γ ∈ ∆(A × Θ) such that there exists σ : supp τ → ∆A such that
(i) γ(a, θ) =
24
P
t
σ(a|t)pτ (t, θ) for all (a, θ) and
Information about the state affects the correlation between players’ actions, but players can
also correlate their behavior based on events that are completely uninformative.
30
L. Mathevet, J. Perego, I. Taneva
(ii) for all i, ai , a0i and ti ,
X
pτ (t, θ)σ(ai , a−i |ti , t−i )(ui (ai , a−i , θ) − ui (a0i , a−i , θ)) ≥ 0
(11)
a−i ,t−i ,θ
and
P
P
p
(t
,
t
,
θ)
a ,θ pτ (t, θ)σ(a|ti , t−i )
τ
i
−i
P θ
= P −i
θ,t−i pτ (ti , t−i , θ)
a−i ,t−i ,θ pτ (t, θ)σ(a|ti , t−i )
(12)
(11) and (12) describe the agent normal-form correlated equilibrium of Forges
(1993, 2006). Every player i has a hierarchy ti and agent (i, ti ) is recommended
to play ai via σ. This recommendation carries no information about θ beyond
ti , so that first-order beliefs are unaffected. But the recommendation could carry
information about others’ types. (12) guarantees that this is not the case: for all i,
prob(t−i |ti ) = prob(t−i |ti , ai ) for all ai , ensuring that σ preserves the beliefs from τ .
As before, the designer manipulates players’ beliefs as if she randomized between
minimal random posteriors; once one is drawn, the realization of a belief hierarchy
is accompanied by an action recommendation (from the designer) according to σ.
Every agent (i, ti ) will follow this recommendation because of (11). In the above
example, we can check that γ(a, θ) = π 2 (a|θ)µ0 (θ) is a correlated equilibrium
under τ , so that redundancy is now taken into account.
From here, the representation theorem holds in the same way as before, since
the correlated equilibrium operator is also linear. The designer now evaluates her
expected payoff in a random posterior at some selected correlated equilibrium.25
8.2.
Bayes Correlated Equilibrium Approach to Information Design
In their seminal work, Bergemann and Morris (2015) (BM hereafter) introduce a
notion of correlated equilibrium in incomplete information games—Bayes correlated equilibrium (BCE)—that can be used in information design. Taneva (2015)
is one of the first papers to apply it to information design. This section presents
this alternative approach.
25
Several notions of correlated equilibrium are available in incomplete information games (see
Forges (1993)). As we will see in the next section, the Bayes correlated equilibrium concept
(BCE) of Bergemann and Morris (2015) captures the implications of common knowledge of
rationality and the fact that the players have observed at least the information contained in τ
(assuming τ is chosen by the designer). In this case, random posterior τ has no raison d’être
since the action recommendations in σ supplant it. For example, choosing to give no information
is always optimal, since the set of BCEs is largest in this situation.
Information Design in Games
31
Instead of working with random posteriors, the information design problem can
be solved by working directly with information structures. The epistemic relationship between BNE and BCE (Theorem 1 in BM) shows that the set of BCE of a
game (assuming that players have no information beyond their prior) is the union
of all BNE under all information structures. Accordingly, the designer’s favorite
BCE corresponds to her favorite BNE under an optimal information structure. In
fact, the optimal BCE so found is a map σ ∗ : Θ → ∆A that can be used as a (direct) information structure π ∗ := σ ∗ , in which it is incentive compatible for players
to follow the recommendations made by σ ∗ . In a nutshell, the BCE approach reduces the information design problem to a choice of an incentive-compatible direct
information structure:
X
v(a, θ)π(a|θ)µ0 (θ)
max
π:Θ→∆A
s.t.
X
θ,a
(ui (a, θ) − ui (a0i , a−i , θ))π(a|θ)µ0 (θ) ≥ 0 ∀i, ai , a0i ∈ Ai .
(13)
θ,a−i
Since all incentive constraints and the designer’s expected payoff are linear in π,
this method formulates the problem as a linear program. In the manager’s problem, the solution gives the point on the concave envelope (Figure 1) corresponding
to the optimal value at µ := µ0 .
Just as our extremal representation takes advantage of convexity, the set of
BCEs {π : Θ → ∆A} characterized by (13) is also convex. Can the same type
of extremal representation, available in the world of beliefs, also be of use in the
world of BCEs? Since every linear program has an extreme point that is an optimal
solution, finding the extreme BCEs is important but convexifying is unnecessary.
In some environments, the random posterior approach allows the problem to
be deconstructed into max within and concavification. In these cases, as in the
manager’s problem, working with beliefs is most instructive and the whole concave
envelope can be computed. In other instances, working hierarchies of beliefs may
be impractical, in which case the BCE approach offers an elegant and tractable
way to bypass the complexity of the universal type space given a specific µ0 .
The random posterior approach has other benefits, of applied interest, that
come from deconstructing the problem. For one, the decomposition of random
posteriors into extremal ones, in each of which a BNE is selected, gives us the
opportunity to study the designer’s attitude toward equilibria by varying the selection rule and observing how it changes her optimal choice. The BCE approach
does not allow such study because BCE includes all BNEs of all (consistent) belief
32
L. Mathevet, J. Perego, I. Taneva
subspaces and, thus, supposes the max selection rule. Moreover, in many applications, the designer might be limited to classes of information structures, such
as public or conditionally independent private information. In the BCE linear
program, it is difficult to incorporate such restrictions as one has to consider their
direct implications in terms of equilibrium action distributions (which may not be
be public or conditionally independent). In the world of beliefs, these restrictions
are more straightforward to interpret.
9.
Conclusion
To be written
33
Information Design in Games
Appendix
Our interest in random posteriors lies in their belief representation of an information structure. Some random posteriors, however, will not correspond to any
information structure. Those are of no interest here, which justifies the following
definition: a random posterior τ ∈ ∆T is admissible if it is induced by some
π ∈ Π.
A.
Proposition 1
Proof. (Part a). Suppose that τ is conditionally independent. First, if τ is perfectly informative, then
X
τ=
µ(θ)τθ ,
(14)
θ
where τθ is a (public) random posterior that describes common knowledge that θ
has realized. Given µ(θ) ∈ (0, 1), τ can therefore be written as a convex combination of (public) consistent random posteriors, and hence τ is not minimal.
Second, we show that if τ is non-minimal, then it must be perfectly informative.
Let τ be non-minimal. By Lemma 2 in Appendix B, there exist α ∈ (0, 1) and
τ 0 6= τ 00 such that τ = ατ 0 + (1 − α)τ 00 . Without loss, we can assume supp τ 0 ∩
supp τ 00 = ∅. If this were not the case, then we could find a consistent random
posterior τ ∗ with supp τ ∗ = supp τ 0 ∩ supp τ 00 , in which case τ could be written as
τ = κτ ∗ + (1 − κ)τ̂
where κ = αq + (1 − α)r, with q = τ 0 (supp τ ∗ ) and r = τ 00 (supp τ ∗ ) and
τ̂ =
α(1 − q) 0
(1 − α)(1 − q) 00
(τ \ τ ∗ ) +
(τ \ τ ∗ ).
1−κ
1−κ
Now, take t0 ∈ supp τ 0 and t00 ∈ supp τ 00 . Consider (t0i , t00−i ) and note
pτ (t0i , t00−i |θ) = αpτ 0 (t0i , t00−i |θ) + (1 − α)pτ 00 (t0i , t00−i |θ) = 0
for all θ. By Definition 3, τ is conditionally independent if pτ (t|θ) =
for all t ∈ supp τ . Therefore, if τ were conditionally independent,
(15)
Q
p (t |θ)
i τ i
pτ (t0i , t00−i |θ)
Q
= pτ (t0i |θ) j6=i pτ (t00j |θ)
Q 00
00
0
0
0
00
0
00
= αpτ (ti |θ) + (1 − α)pτ (ti |θ)
αpτ (tj |θ) + (1 − α)pτ (tj |θ) ,
j6=i
34
L. Mathevet, J. Perego, I. Taneva
which is strictly positive for some θ, unless τ is perfectly informative, and thus
contradicts (15). This also implies that a conditionally independent τ that is
non-minimal must be perfectly informative.
(Part b). If τ is public, then every {t} such that t ∈ supp τ is a consistent
subspace. Therefore, if supp τ is degenerate, then it is clearly minimal. But if
supp τ is not a singleton, then τ is a convex combination of multiple consistent
subspaces, in which case τ is not minimal.
B.
B.1.
Proof of The Representation Theorem
Admissibility
Proposition 7. A random posterior τ ∈ ∆T with finite support is admissible iff
(i) τ ∈ C and (ii) for some i,
X
βi∗ (θ|ti )τi (ti )
µ0 (θ) =
ti ∈supp τi
for all θ.
Proof. Let τ be some admissible random posterior, so that there exists π for which
X
π (hµ )−1 (t)θ µ0 (θ)
(16)
τ (t) =
θ
for all t ∈ supp τ . Define p ∈ ∆(Θ × T̂ ) as
p(θ, t) = π (hµ )−1 (t)θ µ0 (θ)
(17)
for all θ and t ∈ supp τ . It is immediate from (16) and (17) that margT p = τ and
so margTi p = τi for all i. Moreover, when any player i forms his posterior beliefs
µi under information structure (supp τ, π), he actually computes the conditional
of p given ti . That is, player i’s hierarchies of beliefs are derived from p(·|ti ) for
all i and, thus,
p(θ, t) = βi∗ (θ, t−i |ti )margTi p(ti )
for all i, θ, and t ∈ supp τ . Since margTi p = τi , we have τ ∈ C. Lastly,
X
βi∗ (θ|ti )τi (ti ) := margΘ p(θ) = π (hµ )−1 (t)θ µ0 (θ) = µ0 (θ)
ti ∈supp τi
Information Design in Games
35
for all θ, which proves Bayes plausibility.
Suppose now that τ ∈ C and satisfies Bayes plausbility. Let us show that
these conditions are sufficient for τ to be admissible. Define information structure
(supp τ, πτ ) where
1
(18)
πτ (t|·) : θ 7→
β ∗ (θ, t−i |ti )τi (ti )
µ0 (θ) i
for all t ∈ supp τ , which is defined independently of the choice of i because τ ∈ C.
First, let us verify that πτ is a valid information structure. Bayes plausbility says
X
βi∗ (θ|ti )τi (ti ) = µ0 (θ),
ti ∈supp τi
which guarantees that
πτ (t|θ) =
X
1
β ∗ (θ|ti )τi (ti ) = 1,
µ0 (θ) t ∈supp τ i
i
i
and in turn that π(·|θ) is a probability measure for every θ. By construction, this
information structure is such that, when any player j receives tj , his beliefs are
µj (·|tj ) = βj∗ (·|tj ). To prove that πτ generates τ , we need to check that
τ (t) =
X
π(t|θ)µ0 (θ)
(19)
θ
for all t ∈ supp τ . By (18), the rhs of (19) is equal to βi∗ (t−i |ti )τi (ti ), which equals
τ (T̂ ) because τ ∈ C (in particular, because margΘ p = τ ).
According to this proposition, admissibility is characterized by two conditions.
First, a random posterior τ must be consistent. Second, at least one player must
satisfy Bayes plausibility and, therefore, all other players will, by consistency.
Overall, the combination of consistency and Bayes plausibility exactly pins down
all admissible random posteriors.
B.2.
Convexity, Minimality and Extreme Points
Lemma 1. The set C is convex.
Proof. Take α ∈ [0, 1] and τ, τ 0 ∈ C (with their respective pτ and pτ 0 ) so that
margT pτ = τ and margT pτ 0 = τ 0 .
(20)
36
L. Mathevet, J. Perego, I. Taneva
Let τα = ατ +(1−α)τ 0 and notice margTi τα (ti ) = αmargTi τ (ti )+(1−α)margTi τ 0 (ti ).
Letting pα = αpτ + (1 − α)pτ 0 (which is just a probability distribution on pτ and
pτ 0 ), it is easy to verify that
pα (θ, t) = βi∗ (θ, t−i |ti )τα,i (ti )
for all i, θ, and t ∈ supp τα by linearity of expectation. Similarly,
margT pα = αmargT pτ + (1 − α)margT pτ 0 = ατ + (1 − α)τ 0 = τα
by (20). Therefore, τα ∈ C.
Although C is convex, it is not closed because we can build sequences in C with
growing supports, only converging to an infinite support random posterior. Still,
the next lemma proves that minimal consistent random posteriors are the extreme
points of the set of consistent random posteriors.
Lemma 2. E = C M .
Proof. An extreme point of C is a random posterior τ such that τ = ατ 0 +(1−α)τ 00
if and only if τ 0 = τ 00 = τ . We first need to show that if τ ∈ C M , then τ is an extreme
point of C. By way of contradiction, suppose that τ ∈ C M but τ = ατ 0 + (1 − α)τ 00
for some τ 0 6= τ 0 . Then, let λ̃ := max{λ ≥ 0 : τ + λ(τ 00 − τ ) ∈ C} and define
τ̃ := τ + λ̃(τ 00 − τ ). In this case, supp τ̃ ( supp τ , violating minimality of τ .
Conversely, suppose τ is not minimal, meaning that there is a τ 0 ∈ C such that
supp τ 0 ( supp τ . Define τ 00 ∈ ∆T as τ 00 (·) := τ (· | supp τ \supp τ 0 ), the conditional
distribution of τ on the subset supp τ \ supp τ 0 . Clearly
τ = ατ 0 + (1 − α)τ 00
(21)
where α = τ (supp τ 0 ) ∈ (0, 1). Since supp τ 0 is belief-closed, so is supp τ \ supp τ 0 .
Since τ 00 is derived from a consistent τ and is supported on a belief-closed subspace,
τ 00 must be consistent, τ 00 ∈ C. Given that τ 00 6= τ 0 , (21) implies that τ is not an
extreme point.
Proposition 8. Any τ ∈ C is the unique convex combination of extreme points of
C, i.e, there exist unique {ei }ni=1 ⊆ C M and weakly positive numbers {αi }ni=1 with
Pn
Pn
i=1 αi = 1 such that τ =
i=1 αi ei .
Proof. Take any τ ∈ C. Either τ is minimal, in which case we are done, or it is
not, in which case there is τ 0 ∈ C such that supp τ 0 ( supp τ . Similarly, either
Information Design in Games
37
τ 0 is minimal, in which case we conclude that there exists a minimal e1 := τ 0
with support in supp τ , or there is τ 00 ∈ C such that supp τ 00 ( supp τ 0 . Given
that τ has finite support, this procedure eventually delivers a minimal consistent
random posterior e1 . Since τ and e1 are both consistent and hence, their support
belief-closed, supp (τ \ e1 ) must be belief-closed. To see why, note that for any
t ∈ supp (τ \ e1 ), if there were i, t̂ ∈ supp e1 and θ ∈ Θ such that pτ (θ, t̂−i |ti ) > 0,
then this would imply pτ (θ, t̂−i , ti ) > 0 and, thus, pτ (θ, ti , t̂−(ij) |t̂j ) > 0 (where t̂−(ij)
represents the hierarchies of beliefs of players other than i and j). As a result,
player j would believe at t̂j (a hierarchy that j can have in e1 ) that i believes
that players’ types could be outside supp e1 (because pτ (θ, t) > 0). Then, it would
not be common knowledge in e1 among all players that they are in e1 , which is a
contradiction. Given that supp (τ \ e1 ) is a belief-closed subset of supp τ and τ is
consistent, τ \ e1 must itself be consistent under
pτ \e1 (θ, t) :=
pτ (θ, t)
τ (supp (τ \ e1 ))
for all θ and t ∈ supp (τ \ e1 ). This follows immediately from the conditions that
pτ (θ, t) = βi∗ (θ, t−i |ti )τi (ti ) for all θ, t and i, margT pτ = τ , and the definition of
belief-closedness. Therefore, we can reiterate the procedure from the beginning
and apply it to τ \e1 . After ` − 1 steps, we obtain the consistent random posteriors
τ \{e1 , . . . , e`−1 }. Since τ has finite support, there must be ` large enough such
that τ \{e1 , . . . , e`−1 } is minimal; when it happens, denote e` := τ \{e1 , . . . , e`−1 }.
We conclude that
`
X
τ=
τ (supp ei )ei
i=1
where τ (supp ei ) ≥ 0 and
B.3.
P`
i=1
τ (supp ei ) = τ (∪`i=1 ei ) = τ (supp τ ) = 1.
Linearity of BNE and Payoffs
In this section we prove linearity of w. To do so, we will need some intermediate
steps. It is not obvious that the BNE of a mixture of subspaces (of the universal
type space) can be written as a mixture of BNEs in the respective subspaces. In
consistent spaces, however, the result holds as we prove next.
Lemma 3. The correspondence BNE is linear, i.e., for all τ 0 and τ 00 in C M and
α ∈ [0, 1],
BNE(ατ 0 + (1 − α)τ 00 ) = αBNE(τ 0 ) + (1 − α)BNE(τ 00 ).
38
L. Mathevet, J. Perego, I. Taneva
Proof. Direction ⊆. Take any τ 0 , τ 00 ∈ C and α ∈ [0, 1]. Define τ := ατ 0 +(1−α)τ 00
and pick γ ∈ BNE(τ ). We want to show that there exists γ 0 ∈ BNE(τ 0 ) and
γ 00 ∈ BNE(τ 00 ) such that γ = αγ 0 + (1 − α)γ 00 . By definition, γ ∈ BNE(τ ) implies
that there is a σ ∈ BNE(τ ) such that
γ(θ, a) =
X
Q
σ (a |t )p (t, θ)
i i i i τ
t∈supp τ
for all (θ, a) and
supp σi (ti ) ⊆ argmax
ai
X
ui (ai , σ−i (t−i ), θ)βi∗ (θ, t−i |ti )
(22)
θ,t−i ∈supp τ−i
for all ti ∈ supp τi and i. By definition of τ and pτ , we have
pτ (θ, t) := τ (t)β ∗ (θ|t)
= ατ 0 (t)β ∗ (θ|t) + (1 − α)τ 00 (t)β ? (θ|t)
= αpτ 0 (θ, t) + (1 − α)pτ 00 (θ, t).
Substituting this expression in the equation above we get
X Q
0
00
γ(a, θ) =
σ
(a
|t
)
αp
(t,
θ)
+
(1
−
α)p
(t,
θ)
τ
τ
i i i i
t∈supp τ
= α
Q
X
σ (a |t )p 0 (t, θ) + (1 − α)
i i i i τ
X
Q
σ (a |t )p 00 (t, θ)
i i i i τ
t∈suppτ 00
t∈suppτ 0
where the last equality holds because supp τ 0 ∩supp τ 00 = ∅. Define σi0 : supp τi0 →
∆(Ai ) such that σi0 (ti ) = σi (ti ) for all ti ∈ supp τi0 and i. Since supp τ 0 ∩supp τ 00 =
∅, any t either belongs to supp τ 0 or supp τ 00 . Without loss, assume t ∈ supp τ 0 ,
so that (22) gives
supp σi0 (ti ) ⊆ argmax
ai
X
0
ui (ai , σ−i
(t−i ), θ)βi∗ (θ, t−i |ti )
0
θ,t−i ∈supp τ−i
for all i. A similar argument can be made for σi00 : supp τi00 → ∆(Ai ) such that
σi00 (ti ) = σi (ti ) for all ti ∈ supp τi00 and i. This and the above imply
γ(θ, a) = αγ 0 (θ, a) + (1 − α)γ 00 (θ, a).
39
Information Design in Games
Direction ⊇. Let γ 0 ∈ BNE(τ 0 ) and γ 00 ∈ BNE(τ 00 ) and consider the convex
combination τ = ατ 0 + (1 − α)τ 00 . There exist σ 0 and σ 00 such that
Q
X
γ 0 (a, θ) =
σ 0 (a |t )p 0 (t, θ)
i i i i τ
t∈supp τ 0
for all (a, θ) and
X
supp σi0 (ti ) ⊆ argmax
ai
0
ui (ai , σ−i
(t−i ), θ)βi∗ (θ, t−i |ti )
0
θ,t−i ∈supp τ−i
for all ti ∈ supp τi0 and i, and and
Q
X
γ 00 (θ, a) =
σ 00 (ai |ti )pτ 00 (t, θ)
i i
t∈supp τ 00
for all (a, θ) and
X
supp σi00 (ti ) ⊆ argmax
ai
00
ui (ai , σ−i
(t−i ), θ)βi∗ (θ, t−i |ti )
00
θ,t−i ∈supp τ−i
for all ti ∈ supp τi00 and i. Thus,
αγ 0 (a, θ) + (1 − α)γ 00 (a, θ) =
X Q
α
σ 0 (a |t )p 0 (t, θ) + (1 − α)
i i i i τ
t∈supp τ 0
X
Q
σ 00 (ai |ti )pτ 00 (t, θ)
i i
t∈supp τ 00
Now define σ = (σi )i∈N such that σi (ti ) := σi0 (ti ) if ti ∈ supp τi0 and σi (ti ) := σi00 (ti )
if ti ∈ supp τi00 . By an argument similar to the one in direction ⊆, we can show
that
X
supp σi (ti ) ⊆ argmax
ui (ai , σ−i (t−i ), θ)βi∗ (θ, t−i |ti )
ai
θ,t−i ∈supp τ−i
for all ti ∈ supp τi and i. Therefore,
X
αγ 0 (θ, a) + (1 − α)γ 00 (θ, a) =
Q
0
00
σ
(a
|t
)
αp
(t,
θ)
+
(1
−
α)p
(t,
θ)
,
τ
τ
i i i i
t∈supp τ
and since τ = ατ 0 + (1 − α)τ 00 ,
αγ 0 (θ, a) + (1 − α)γ 00 (θ, a) =
X
t∈supp τ
Thus, γ ∈ BNE(τ ).
Q
σ (a |t )p (t, θ)
i i i i τ
= γ(θ, a).
40
L. Mathevet, J. Perego, I. Taneva
Lemma 4. The function w is linear over C M .
Proof. Let τ 0 , τ 00 ∈ C M and α ∈ [0, 1]. Define τ = ατ 0 + (1 − α)τ 00 . We want to
show that w(τ ) = αw(τ 0 ) + (1 − α)w(τ 00 ). By definition of w, we have
w(τ ) :=
X
fvτ (a, θ)v(a, θ).
θ,a
By linearity of BNE, we have
X
fv (BNE(τ ))[θ, a]v(θ, a) =
X
θ,a
fv αBNE(τ 0 ) + (1 − α)BNE(τ 00 ) [θ, a]v(θ, a)
θ,a
Since fv is linear, this becomes
α
X
X
fv BNE(τ 00 ) [θ, a]v(θ, a)
fv BNE(τ 0 ) [θ, a]v(θ, a) + (1 − α)
θ,a
θ,a
0
00
= αw(τ ) + (1 − α)w(τ )
Proof of The Representation Theorem. If there exists an optimal information structure π ∗ , then V (π ∗ ) ≥ V (π) for all information structures π. Since an
information structure must induce a random posterior τ ∈ C such that margΘ pτ =
µ0 , which follows from Proposition 7, it must be that the random posterior induced by π ∗ , call it τ ∗ , (weakly) dominates all random posteriors τ ∈ C such that
margΘ pτ = µ0 . That is, margΘ pτ ∗ = µ0 and w(τ ∗ ) ≥ w(τ ) for all τ such that
margΘ pτ = µ0 . Given the definition of pτ via (2), pτ and hence margΘ pτ are linear
in τ . In virtue of Proposition 8, we obtain
τ ∗ ∈ argmax
λ∈∆(C M )
X
w(e)λ(e)
e
subject to
X
(23)
margΘ pe λ(e) = µ0 .
e
To establish the converse, suppose that τ ∗ satisfies (23). Then, Proposition 7
implies that τ ∗ can be induced by some information structure (call it π ∗ ), and
so can all random posteriors τ ∈ C such that margΘ pτ = µ0 . Since (23) implies
that w(τ ∗ ) ≥ w(τ ) for all τ such that margΘ pτ = µ0 , we conclude that π ∗ ∈
argmax(S,π)∈Π V (π).
Information Design in Games
C.
41
Proposition 2
Proof. Fix a finite e ∈ C M , a > 0 and let µ0 = pe . Let G be the game defined
in (Chen et al., 2010, Lemma 1). In this “report-your-beliefs” game, when players
are sent to a finite type space e, they have a strict incentive to truthfully report
their own hierarchy ti ∈ supp ei . Conversely, when they are sent to a different
finite type space e0 6= e, that is suitably distant from e, they have a strict incentive
not to report ti ∈ supp ei . More formally, define
d(e, e0 ) := max sup sup βi∗ (E|ti ) − βi∗ (E|t0i )
i
ti ∈e E⊆Θ×T−i
t0i ∈e0
Chen et al. (2010) shows that there exists > 0 such that, for all e0 with d(e, e0 ) >
, if a player falsely reports hierarchy ti ∈ supp ei when in e0 , he suffers an expected
utility loss of at least > 0.
Define v : A → R as v(a) := 1a∈supp e . This designer gets a positive payoff if
and only if agents report a profile of hierarchies in the support of e ∈ C M . The
designer’s expected payoff of sending players to e0 ∈ C M is thus
0
1 if e = e,
X
Ee0 (v(θ, a)) =
e0 (t)1a(t)∈supp e =
x if d(e0 , e) < ,
t∈supp e0
0 if d(e0 , e) ≥ .
where 0 ≤ x ≤ 1. In fact, when e0 is suitably close to e, some players could
misreport their type in favor of e. However, in such circumstance, the designer
can achieve at most an expected payoff of 1 under e0 . Thus, the designer can
maximize his payoff by setting λ∗ = δe , which if feasible since µ0 = pe .
D.
Propositions 3 and 4
Proof of Proposition 3. By Lemma 1, C is a convex subset of the vector space
S of all signed measures on T . Choose any distinct e, e0 ∈ C M and let V =
{α(e − e0 ) : α ∈ R} ⊆ S. By construction, V is a one-dimensional subspace
of S. Let λV ∈ ∆V represent the Lebesgue measure on V . Let s := e0 and
notice that α(e − e0 ) = αe + (1 − α)e0 − s. By convexity of C, we have that
(C − s) ∩ V = {α(e − e0 ) : α ∈ [0, 1]}. Hence, λV (C − s) > 0. However, since C M
is the set of extreme points of C, we also have that (C M − s) ∩ V contains at most
two points for every s ∈ S. This gives λV (C M − s) = 0, since points have Lebesgue
measure zero in the one-dimensional space V .
42
L. Mathevet, J. Perego, I. Taneva
Proof of Proposition 4. Let τ ∈ A(C, µ). We want to find a sequence (τε ) ⊆ Eµ
w
such that τε −
→ τ . If τ ∈ Eµ , the proof is obvious. So, suppose τ ∈
/ Eµ . To
construct a sequence of (τε ), we work first in the space of information structures Π
and then return to C. Let (S, π) be the information structure inducing τ such that
S := supp τ (see (18) for example). Now, pick an arbitrary probability measure
ξ ∈ ∆S with full support, and mix π with ξ in the following way:
πε (T̂ |θ) := (1 − ε) π(T̂ |θ) + ε ξ(T̂ )
for all T̂ ⊆ S and all θ. Now that we have created a sequence (S, πε ) ⊆ Π,
consider the corresponding sequence (τε ) ⊆ C of induced random posteriors. Since
we have kept prior µ fixed, we also have that (τε ) ⊆ A(C, µ). By construction,
w
we have that as πε → π, also τε −
→ τ . We are left to show that (τε ) ⊆ Eµ . Pick
any τε and let S ε := supp τε . To show τε is minimal, we show that the smallest
belief-closed subspace in S ε is S ε itself. Consider any S 0 ( S ε and suppose by way
of contradiction that it is belief-closed. That is, pick an arbitrary player i and an
arbitrary hierarchy ti ∈ Si0 , and suppose βi∗ (Θ × {t−i : (ti , t−i ) ∈ S 0 } | ti ) = 1. This
implies that, when ti realizes, player i knows (ti , t̄−i ) ∈ S ε \ S 0 cannot have been
realized. However, when ε > 0, this contradicts the fact that ξ has full support.
Thus, τε ∈ Eµ .
To prove that A(C, µ)\Eµ is dense in A(C, µ), fix any τ ∈ A(C, µ) so that
either τ ∈ A(C, µ)\Eµ or τ = e ∈ Eµ . In the latter, choose τ 0 ∈ A(C, µ) such
that supp τ 0 6= supp e. Then define τ = τ 0 + (1 − )e for ∈ (0, 1) and note
w
→ e, hence τ = e is in the closure of
τ ∈ A(C, µ)\Eµ for all . Clearly, τ −
A(C, µ)\Eµ .
E.
Manager’s Problem: Proofs
Proof of Proposition 5. (“only if”) Let η be a consistent posterior. Therefore, by
(2) there exists pη ∈ ∆(Θ × ∆Θ × ∆∆Θ) such that
marg(µ1 ,λ2 ) pη (µ1 , λ2 , θ) = η(µ1 , λ2 )
(24)
for all (µ1 , λ2 ) ∈ Supp(η).
P
p (θ,µ ,λ )
By definition of λ2 we have λ2 (µ1 ) = θ ηη2 (λ2 )1 2 . Therefore, for all µ1 ∈
Supp(η1 ) and λ2 ∈ Supp(η2 ) we get that
X
η(µ1 , λ2 ) =
pη (θ, µ1 , λ2 ) = η2 (λ2 )λ2 (µ1 )
θ
Information Design in Games
43
where the first equality follows by (24) and the second equality follows by the
definition of λ2 .
(“if”) Take any η ∈ A and define pη as
pη (µ1 , λ2 , θ) := µ0 (θ)
η1 (µ1 )µ1 (θ) η2 (λ2 )λ2 (µ1 )
= µ1 (θ)η2 (λ2 )λ2 (µ1 ).
µ0 (θ)
η1 (µ1 )
We will show that given
(i) η(µ1 , λ2 ) = η2 (λ2 )λ2 (µ1 ) for all (µ1 , λ2 ) ∈ supp η,
all of the consistency conditions in (2) are satisfied. First, the marginal of pη on
(µ1 , λ2 ) is given as
marg(µ1 ,λ2 ) pη (µ1 , λ2 , θ) =
X
µ1 (θ)η2 (λ2 )λ2 (µ1 ) = η2 (λ2 )λ2 (µ1 ) = η(µ1 , λ2 ) (25)
θ
where the last equality follows by (i).
Next, the beliefs associated with each of the sent types need to be consistent
with pη . P, after receiving µ1 has only a belief over θ and not over λ2 . Indeed, we
have that β1∗ (θ|µ1 ) = µ1 (θ). Hence, β1∗ (θ|µ1 )η1 (µ1 ) = µ1 (θ)η1 (µ1 ). On the other
hand,
X
X
pη (µ1 , λ2 , θ) =
µ1 (θ)η2 (λ2 )λ2 (µ1 ) = µ1 (θ)η1 (µ1 )
λ2
λ2
where the last equality follows by (i). Thus, we have that β1∗ (θ|µ1 )η1 (µ1 ) =
pη (µ1 , θ).
W , after receiving λ2 , has beliefs only over µ1 and not over θ: β2∗ (µ1 |λ2 ) =
λ2 (µ1 ). Hence, β2∗ (µ1 |λ2 )η2 (λ2 ) = λ2 (µ1 )η2 (λ2 ).On the other hand,
X
θ
pη (µ1 , λ2 , θ) =
X
µ1 (θ)η2 (λ2 )λ2 (µ1 ) = λ2 (µ1 )η2 (λ2 ).
θ
Thus, we have shown that β2∗ (µ1 |λ2 )η2 (λ2 ) = pη (µ1 , λ2 ). Hence, η is consistent.
The characterization of admissibility in A will be useful in what follows: a ranP
dom posterior η ∈ A is admissible if and only if it is consistent and µ1 η1 (µ1 )µ1 =
µ0 . This follows from Proposition 5 and Proposition 7.
44
L. Mathevet, J. Perego, I. Taneva
Proof of Proposition 6. Let
BNEA (τ ) = {ν ∈ ∆A : ∃γ ∈ BNE(τ ) s.t. ν = margA γ}
Any ν ∈ ∪τ BNEA (τ ) can be written as
ν
a2 = 1
a2 = 0
a1 = 1
a1 = 0
c
q−c
p−c
1−p−q+c
Table 4: ν
Step 1. ν ∈ ∪τ BNEA (τ ) iff
(1) 1 ≥ p ≥ c ≥ 0, 1 ≥ q ≥ c ≥ 0, 1 + c ≥ p + q
(2) p ∈ [1 − 2µ0 , 1] if µ0 ≤ 12 ;
p ∈ [0, 2(1 − µ0 )] if µ0 ≥
(3)
c
q
≥
1
2
≥
p−c
1−q
1
2
for q ∈ (0, 1),
q = 0 if p = 0, and q = 1 if p = 1.
The conditions in (1) are necessary and sufficient to guarantee that ν is a proper
probability distribution. We next show that the BNE incentive compatibility
constraints are equivalent to (2) and (3).
If ν ∈ BNEA (τ ), then there exists γ ∈ BNE(τ ) s.t. ν = margA γ. By standard
revelation arguments, we can write IC constraints as a function of γ,
X
a−i ,θ
ui (ai , a−i , θ)γ(ai , a−i , θ) ≥
X
ui (a0i , a−i , θ)γ(ai , a−i , θ)
(26)
a−i ,θ
for all ai , a0i and i.
Since W’s incentives are driven only by matching P’s action, (26) becomes
equivalent to
c · u2 (a1 = 1, a2 = 1) + (q − c) · u2 (a1 = 1, a2 = 1) ≥
c · u2 (a1 = 1, a2 = 0) + (q − c) · u2 (a1 = 1, a2 = 0) (27)
Information Design in Games
45
and
(p − c) · u2 (a1 = 1, a2 = 0) + (1 − p − q + c) · u2 (a1 = 1, a2 = 0) ≥
(p − c) · u2 (a1 = 1, a2 = 1) + (1 − p − q + c) · u2 (a1 = 1, a2 = 1) (28)
which are equivalent to 2c ≥ q and 1 − q ≥ 2(p − c). From here, we directly obtain
p−c
c
≥ 21 when q 6= 0 and 12 ≥ 1−q
when q 6= 1. Now suppose that p = 0. Then by
q
(1) it must be that c = 0, which in turn gives q = 0 by (27). Finally, suppose that
p = 1. Then, by (28) we get that 2c − q ≥ 1. Since by (1) q ≥ c, the previous
inequality needs to hold when q = c and so a ≥ 1. This implies q = c = 1. Thus,
we have derived the conditions in (3).
Consider the following parameterization of distributions of P’s actions conditional on the state γ(a1 |θ):
γ(·|θ = 1)
γ(·|θ = 0)
a1 = 1
x
a1 = 1
y
a1 = 0
1−x
a1 = 0
1−y
In order for these distributions to be consistent with ν it needs to hold that
p = xµ0 + y(1 − µ0 ).
Since P’s incentives are driven by matching the state θ only, (26) can be written
as a function of γ(a1 |θ) :
µ0 x + 2(1 − µ0 )y ≥ 2µ0 x + (1 − µ0 )y
and
2µ0 (1 − x) + 2(1 − µ0 )(1 − y) ≥ µ0 (1 − x) + 2(1 − µ0 )(1 − y)
which are in turn equivalent to
(1 − µ0 )y ≥ µ0 x
(29)
(1 − µ0 )y ≥ 1 − 2µ0 + µ0 x.
(30)
and
Suppose µ0 ≤ 21 . Then, (30) is more binding than (29). If µ0 = 0, it must
be that y = 1 for (30) to hold. Hence, we have p = y = 1. If µ0 ∈ (0, 21 ] then
46
L. Mathevet, J. Perego, I. Taneva
µ0
µ0
y ≥ 1 − 1−µ
+ 1−µ
x. From here, we obtain that the minimal p is when x = 0 and
0
0
0
. This gives p = 1 − 2µ0 . Hence, we get p ∈ [1 − 2µ0 , 1] when µ0 ≤ 21 .
y = 1−2µ
1−µ0
Suppose µ0 ≥ 21 . Then, (29) is more binding than (30). If µ0 = 1, it must
be that x = 0 for (29) to hold. Hence, we have p = x = 0. If µ0 ∈ [ 21 , 1) then
µ0
0
y ≥ 1−µ
x. From here, we obtain that the maximal p is when y = 1 and x = 1−µ
.
µ0
0
1
This gives p = 2(1 − µ0 ). Hence, we get p ∈ [0, 2(1 − µ0 )] when µ0 ≥ 2 .
Thus, we have derived the conditions in (2).
Step 2. Here we prove the claim of the proposition. Take any ν ∈ ∪τ BNEA (τ )
and consider the parameterization from Table 4. From Step 1 we know that ν
must fall into one of the cases listed below.
p−c
Case 1: Suppose qc 6= 1−q
. Then, either p ∈ {0, 1}, in which case we know
from our previous result that p = q = c = 0 or p = q = c = 1. In this case, µ0
must belong to some interval such that no information, i.e. a random posterior
η(µ1 = µ0 , λ2 µ1 = µ0 ) = 1 = 1, generates ν ∈ BNEA (η). Or 0 < p < 1 in which
case we can always set µ01 ≤ 1/2, µ001 ≥ 1/2 and µ01 6= µ001 such that
pµ01 + (1 − p)µ001 = µ0 .
By setting λ02 (µ01 ) = qc , λ002 (µ01 ) =
as
η
µ01
µ001
p−c
,
1−q
λ02
and by sending random posterior η specified
λ002
c
p−c
q−c 1−p−q+c
Table 5: η
we obtain ν ∈ BNEA (η). Notice that this posterior is admissible and nonredundant.
−1+p
For example, suppose µ0 < 12 and p ∈ [1 − 2µ0 , 1). Then set µ01 = 2µ02p
,
p−c
1
c
00
0
0
00
0
µ1 = 2 and λ2 (µ1 ) = q , λ2 (µ1 ) = 1−q . The random posterior η, specified as in
Table 5, is admissible, non-redundant, and ν ∈ BNEA (η). All other cases proceed
in a similar way.
p−c
p−c
Case 2: Suppose qc = 1−q
. Then, by (3) it must be that qc = 1−q
= 21 . This
implies p = 12 and c = 21 q. The equilibrium distribution over action profiles is thus
given by
Information Design in Games
ν
a2 = 1
a1 = 1
1
q
2
1
q
2
a1 = 0
47
a2 = 0
1
(1
2
1
(1
2
− q)
− q)
Since p = 12 , by (2) it must be that µ0 ∈ [ 14 , 34 ].
Case 2.1: µ0 ∈ [ 14 , 12 ]. Then set µ01 = 0, µ001 = 2µ0 and send the posterior
η
λ2
µ01
1
2
1
2
µ001
which is admissible, and non-redundant. Under this posterior, it is a best response
for W to mix with any probability, in particular q, while P will play a1 = 1 after
observing µ01 and a1 = 0 after observing µ001 . Thus, ν ∈ BNEA (η).
Case 2.2: µ0 ∈ [ 21 , 34 ]. Then set µ01 = 2µ0 − 1, µ001 = 1 and send the
posterior
η
λ2
µ01
1
2
1
2
µ001
which is admissible, and non-redundant. Under this posterior, it is a best response
for W to mix with any probability, in particular q, while P will play a1 = 1 after
observing µ01 and a1 = 0 after observing µ001 . Thus, ν ∈ BNEA (η).
48
L. Mathevet, J. Perego, I. Taneva
References
Alonso, Ricardo and Odilon Camara. 2015. “Persuading Voters.” Working Paper,
Marshall School of Business.
Anderson, Robert M. and William Zame. 2001. “Genericity with Infinitely Many
Parameters.” The B.E. Journal of Theoretical Economics 1 (1):1–64.
Angeletos, George-Marios and Alessandro Pavan. 2007. “Efficient Use of Information and Social Value of Information.” Econometrica 75 (4):1103–1142.
Aumann, Robert J. and Michael B. Maschler. 1995. Repeated Games with Incomplete Information. Cambridge: MA: MIT Press.
Benoı̂t, Jean-Pierre and Juan Dubra. 2011. “Apparent overconfidence.” Econometrica 79 (5):1591–1625.
Bergemann, Dirk and Stephen Morris. 2013. “Robust Predictions in Games With
Incomplete Information.” Econometrica 81 (4):1251–1308.
———. 2015. “Bayes Correlated Equilibrium and the Comparison of Information
Structures in Games.” Theoretical Economics :forthcoming.
Bertsekas, Dimitri P. 1999. Nonlinear Programming. Athena Scientific, second ed.
Brandenburger, Adam and Eddie Dekel. 1993. “Hierarchies of Beliefs and Common
Knowledge.” Journal of Economic Theory 59 (1):189–198.
Brocas, Isabelle and Juan D Carrillo. 2007. “Influence through ignorance.” The
RAND Journal of Economics 38 (4):931–947.
Chen, Yi-Chun, Alfredo Di Tillio, Eduardo Faingold, and Siyang Xiong. 2010.
“Uniform topologies on types.” Theoretical Economics 5 (3).
Christensen, J. P. R. 1974. Amsterdam: North-Holland: Topology and Borel
Structure.
Crawford, Vincent P. and Joel Sobel. 1982. “Strategic Information Transmission.”
Econometrica 50 (6):1431–51.
Ely, Jeffrey, Alexander Frankel, and Emir Kamenica. 2015. “Suspense and Surprise.” Journal of Political Economy 123 (1):215–260.
Information Design in Games
49
Farrell, Joseph and Robert Gibbons. 1989. “Cheap Talk with Two Audiences.”
American Economic Review 79 (5):1214–1223.
Forges, Francoise. 1993. “Five Legitimate Definitions of Correlated Equilibrium
in Games with Incomplete Information.” Theory and Decision 35:277.
———. 2006. “Correlated Equilibrium in Games with Incomplete Information
Revisited.” Theory and Decision 61:329.
Galperti, Simone. 2015. “Conceal, Surprise, and Change Paradigms: Persuasion
without Common-Support Priors.” Working Paper, Department of Economics,
University of California at San Diego.
Gentzkow, Matthew and Emir Kamenica. 2014. “Costly Persuasion.” American
Economic Review Papers and Proceedings 104 (5):457–62.
Hunt, B. R. 1992. “Prevalence: A Translation-Invariant ?Almost Every? on
Infinite-Dimensional Spaces.” Bulletin (New Series) of the American Mathematical Society 27:217–238.
Kamenica, Emir and Matthew Gentzkow. 2011. “Bayesian Persuasion.” American
Economic Review 101 (6):2590–2615.
Kolotilin, Anton, Ming Li, Tymofiy Mylovanov, and Andriy Zapechelnyuk. 2015.
“Persuasion of a Privately Informed Receiver.” Working paper.
Lipnowski, Elliot and Laurent Mathevet. 2015. “Disclosure to a Psychological
audience.” New York University.
Liu, Qingmin. 2009. “On redundant types and Bayesian formulation of incomplete
information.” Journal of Economic Theory 144 (5):2115–2145.
Mertens, Jean-Francois and Shmuel Zamir. 1985. “Formulation of Bayesian analysis for games with incomplete information.” International Journal of Game
Theory 14 (1):1–29.
Morris, Stephen and Hyun Song Shin. 2002. “Social Value of Public Information.”
American Economic Review 92 (5):1521–1534.
Rockafellar, R. Tyrrell. 1970. Convex Analysis. Princeton, New Jersey: Princeton
University Press, 2nd ed.
Stinchcombe, Maxwell. 2011a. “Balance and discontinuities in infinite games with
type-dependent strategies.” Journal of Economic Theory 146 (2):656–671.
50
L. Mathevet, J. Perego, I. Taneva
———. 2011b. “Correlated equilibrium existence for infinite games with typedependent strategies.” Journal of Economic Theory 146 (2):638–655.
Taneva, Ina. 2015. “Information Design.” Economics Department, Edinburgh
University.