Introduction to Digital Signal Processing
advertisement

Chapter 1: Introduction
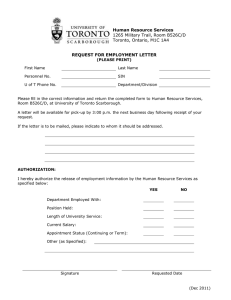
Analog and Digital Signals
I
I
analog signal = continuous-time + continuous amplitude
digital signal = discrete-time + discrete amplitude
Introduction to Digital Signal Processing
continuous amplitude
discrete amplitude
x(t)
continuous-time
x(t)
2
2
Professor Deepa Kundur
-4
-3
-2
-1
1
t
-4
-3
-2
-1
0.5
1 / 58
-2
-1
1
1.5
2
3
4
t
x[n]
2
0
1
2
3
n
1
-3
-2
-1
0
1
2
1
3
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
Chapter 1: Introduction
2.5
-2
1
-3
n
2 / 58
Chapter 1: Introduction
Analog and Digital Signals
I
4
x[n]
discrete-time
I
3
-2
University of Toronto
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
2
1
0.5
Discrete-time Sinusoids
analog system = analog input + analog output
digital system = digital input + digital output
x(n) = A cos(ωn + θ) = A cos(2πfn + θ), n ∈ Z
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
3 / 58
I
discrete-time signal (not digital), ∵ −A ≤ xa (t) ≤ A and n ∈ Z
I
A = amplitude
I
ω = frequency in rad/sample
I
f = frequency in cycles/sample; note: ω = 2πf
I
θ = phase in rad
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
4 / 58
Chapter 1: Introduction
Chapter 1: Introduction
MINIMUM OSCILLATION
MAXIMUM OSCILLATION
ENVELOPE CYCLES
MINIMUM OSCILLATION
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
5 / 58
Chapter 1: Introduction
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
6 / 58
Chapter 1: Introduction
NOT PERIODIC
ENVELOPE CYCLES
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
7 / 58
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
8 / 58
Chapter 1: Introduction
Chapter 1: Introduction
Uniqueness: Continuous-time
Uniqueness: Continuous-time
F1 6= F2 :
For F1 6= F2 ,
A cos(2πF1 t + θ) 6= A cos(2πF2 t + θ)
except at discrete points in time.
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
9 / 58
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
Chapter 1: Introduction
10 / 58
Chapter 1: Introduction
Uniqueness: Discrete-time
-3
Let f1 = f0 + k where k ∈ Z,
x1 (n) =
=
=
=
-2
-1
0
1
-1
0
1
2
3
4
5
3
4
5
6
A e j(2πf1 n+θ)
A e j(2π(f0 +k)n+θ)
A e j(2πf0 n+θ) · e j(2πkn)
x0 (n) · 1 = x0 (n)
-3
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
11 / 58
-2
2
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
6
12 / 58
Chapter 1: Introduction
Chapter 1: Introduction
Harmonically Related Complex Exponentials
Harmonically Related Complex Exponentials
Scientific Designation
C1
C2
C3
C4 (middle C)
C5
C6
C7
C8
Harmonically related sk (t) = e jkΩ0 t = e j2πkF0 t ,
(cts-time)
k = 0, ±1, ±2, . . .
Scientific Designation
C-1
C0
C1
C2
C3
C4
..
.
Frequency (Hz)
8.176
16.352
32.703
65.406
130.813
261.626
..
.
k for F0 = 8.176
1
2
4
8
16
32
C9
8372.018
1024
C1
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
13 / 58
C2
C3
Frequency (Hz)
32.703
65.406
130.813
261.626
523.251
1046.502
2093.005
4186.009
C4
k for F0 = 8.176
4
8
16
32
64
128
256
512
C5
C6
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
Chapter 1: Introduction
C7
C8
14 / 58
Chapter 1: Introduction
Harmonically Related Complex Exponentials
Harmonically Related Complex Exponentials
What does the family of harmonically related sinusoids sk (t) have in
common?
Discrete-time Case:
Harmonically related sk (t) = e jkΩ0 t = e j2π(kF0 )t ,
(cts-time)
k = 0, ±1, ±2, . . .
For periodicity, select f0 =
1
N
where N ∈ Z:
Harmonically related sk (n) = e j2πkf0 n = e j2πkn/N ,
(dts-time)
k = 0, ±1, ±2, . . .
1
1
=
cyclic frequency
kF0
period: Tk = any integer multiple of T0
1
common period: T = k · T0,k =
F0
fund. period: T0,k =
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
I
15 / 58
There are only N distinct dst-time harmonics:
sk (n), k = 0, 1, 2, . . . , N − 1.
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
16 / 58
Chapter 1: Introduction
Chapter 1: Introduction
Analog-to-Digital Conversion
Analog-to-Digital Conversion
A/D converter
xa(t)
A/D converter
xq(n)
x(n)
Sampler
Analog
signal
Quantizer
Discrete-time
signal
xa(t)
01011...
Coder
Quantized
signal
Digital
signal
xq(n)
x(n)
Sampler
Analog
signal
Quantizer
Discrete-time
signal
01011...
Coder
Quantized
signal
Digital
signal
Sampling:
I conversion from cts-time to dst-time by taking “samples” at
discrete time instants
I E.g., uniform sampling: x(n) = xa (nT ) where T is the sampling
period and n ∈ Z
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
17 / 58
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
Chapter 1: Introduction
Chapter 1: Introduction
Analog-to-Digital Conversion
Analog-to-Digital Conversion
A/D converter
xa(t)
Analog
signal
A/D converter
x(n)
Sampler
18 / 58
Quantizer
Discrete-time
signal
xq(n)
Quantized
signal
xa(t)
01011...
Coder
Digital
signal
Analog
signal
Quantization:
I conversion from dst-time cts-valued signal to a dst-time
dst-valued signal
I quantization error: eq (n) = xq (n) − x(n) for all n ∈ Z
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
x(n)
Sampler
Quantizer
Discrete-time
signal
xq(n)
Quantized
signal
01011...
Coder
Digital
signal
Coding:
I representation of each dst-value xq (n) by a
b-bit binary sequence
I e.g., if for any n, xq (n) ∈ {0, 1, . . . , 6, 7}, then the coder may
use the following mapping to code the quantized amplitude:
19 / 58
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
20 / 58
Chapter 1: Introduction
Chapter 1: Introduction
Analog-to-Digital Conversion
Sampling Theorem
A/D converter
xa(t)
x(n)
Sampler
Analog
signal
Quantizer
Discrete-time
signal
xq(n)
If the highest frequency contained in an analog signal xa (t) is
Fmax = B and the signal is sampled at a rate
01011...
Coder
Quantized
signal
Fs > 2Fmax = 2B
Digital
signal
then xa (t) can be exactly recovered from its sample values using the
interpolation function
Example coder:
0
1
2
3
000
001
010
011
4
5
6
7
100
101
110
111
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
sin(2πBt)
2πBt
is called the Nyquist rate.
g (t) =
Note: FN = 2B = 2Fmax
21 / 58
Chapter 1: Introduction
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
Chapter 1: Introduction
Sampling Theorem
Bandlimited Interpolation
Sampling Period = T =
1
1
=
Fs
Sampling Frequency
Therefore, given the interpolation relation, xa (t) can be written as
xa (t) =
22 / 58
∞
X
x(n) samples
bandlimited interpolation
function -- sinc
xa (nT )g (t − nT )
n=−∞
xa (t) =
∞
X
n
0
x(n) g (t − nT )
n=−∞
where xa (nT ) = x(n); called bandlimited interpolation.
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
23 / 58
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
24 / 58
Chapter 1: Introduction
Chapter 1: Introduction
Digital-to-Analog Conversion
Digital-to-Analog Conversion
x(n)
original/bandlimited
interpolated signal
original/bandlimited
interpolated signal
1
n
0
I
I
Common interpolation approaches: bandlimited interpolation,
zero-order hold, linear interpolation, higher-order interpolation
techniques, e.g., using splines
In practice, “cheap” interpolation along with a smoothing filter
is employed.
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
I
T
2T
t
3T
Common interpolation approaches: bandlimited interpolation,
zero-order hold, linear interpolation, higher-order interpolation
techniques, e.g., using splines
In practice, “cheap” interpolation along with a smoothing filter
is employed.
26 / 58
Elementary Discrete-Time Signals
1. unit sample sequence (a.k.a. Kronecker delta function):
1, for n = 0
δ(n) =
0, for n 6= 0
linear
interpolation
1
0
T
Chapter 2: Dst-Time Signals & Systems
Digital-to-Analog Conversion
-3T -2T -T
0
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
Chapter 1: Introduction
original/bandlimited
interpolated signal
-3T -2T -T
zero-order
hold
I
25 / 58
1
2T
t
3T
2. unit step signal:
1,
0,
n, for n ≥ 0
0, for n < 0
u(n) =
for n ≥ 0
for n < 0
3. unit ramp signal:
I
I
Common interpolation approaches: bandlimited interpolation,
zero-order hold, linear interpolation, higher-order interpolation
techniques, e.g., using splines
In practice, “cheap” interpolation along with a smoothing filter
is employed.
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
27 / 58
ur (n) =
Note:
u(n) − u(n − 1)= ur (n + 1) − 2ur (n) + ur (n − 1)
δ(n)
=
u(n)
= ur (n + 1) − ur (n)
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
28 / 58
Chapter 2: Dst-Time Signals & Systems
Chapter 2: Dst-Time Signals & Systems
Signal Symmetry
Signal Symmetry
Even signal:
x(−n) = x(n)
Even signal component: xe (n) = 12 [x(n) + x(−n)]
Odd signal: x(−n) = −x(n)
Odd signal component: xo (n) = 12 [x(n) − x(−n)]
x(n)
x(n)
2
2
2
1
1
1
x(n)
-7
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
7
n
-7
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
7
n
-7
-6
-5
-4
-3
-2
-1
0
1
Note: x(n) = xe (n) + xo (n)
2
3
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
4
5
6
7
29 / 58
n
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
Chapter 2: Dst-Time Signals & Systems
Chapter 2: Dst-Time Signals & Systems
Signal Symmetry
1
Simple Manipulation of Discrete-Time Signals
x(n)
(x(n)+x(-n))/2
1
0.5
-6 -5 -4 -3 -2 -1 0 1
-0.5
2 3 4
5 6
7 8
n
I
Transformation of independent variable:
I
-6 -5 -4 -3 -2 -1 0 1
-0.5
2 3 4
5 6
7 8
n
I
I
1
0.5
2 3 4
5 6
7 8
n
0.5
-6 -5 -4 -3
-1
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
-2 -1
-1
0 1
2 3 4
-0.5
5 6
7 8
I
n
31 / 58
Question: what if α 6∈ Z?
Additional, multiplication and scaling:
I
odd part
Question: what if k 6∈ Z?
time scale: n → αn, α ∈ Z
I
(x(n)-x(-n))/2
1
time shift: n → n − k, k ∈ Z
I
-1
x(-n)
-0.5
even part
0.5
-1
-6 -5 -4 -3 -2 -1 0 1
30 / 58
I
amplitude scaling: y (n) = Ax(n),
−∞ < n < ∞
sum: y (n) = x1 (n) + x2 (n),
−∞ < n < ∞
product: y (n) = x1 (n)x2 (n),
−∞ < n < ∞
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
32 / 58
Chapter 2: Dst-Time Signals & Systems
Chapter 2: Dst-Time Signals & Systems
Simple Manipulation of Discrete-Time Signals I
Simple Manipulation of Discrete-Time Signals II
Find x(n) − x(n + 1).
3
x(n)
3
2
2
2
2
-1
2 3 4
5 6
7 8 9 10
-3 -2 -1 0 1
15
20
n
-1
-2
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
-1
-1
-2
-3
-2
-3
33 / 58
1
1
15
7 8 9 10
20
n
-1
-1
-x(n+1)
34 / 58
Simple Manipulation of Discrete-Time Signals
Graph of x( 32 n + 1).
+ 1).
n
< −1
-1
0
1
2
3
4
5
6
7
8
9
10
11
12
> 12
-1
5 6
2
Chapter 2: Dst-Time Signals & Systems
Simple Manipulation of Discrete-Time Signals I
Find
2 3 4
x(n)-x(n+1)
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
Chapter 2: Dst-Time Signals & Systems
x( 32 n
1
1
1
1
-3 -2 -1 0 1
x(n)
3
3n
2
+1
< − 12
− 12
1
0 if
3n
2
5
2
4
11
2
7
17
2
10
23
2
13
29
2
16
35
2
19
> 19
0 if
3n
2
x( 3n
+ 1)
2
+ 1 is an integer; undefined otherwise
undefined
x(1) = 1
undefined
x(4) = 2
undefined
x(7) = 3
undefined
x(10) = 2
undefined
x(13) = 1
undefined
x(16) = −1
undefined
x(19) = −2
+ 1 is an integer; undefined otherwise
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
3
2
3
2
2
1
-3 -2 -1 0 1
-1
-2
-3
35 / 58
2 3 4
5 6
1
This signal is undefined for values of n
that are not even integers and zero for
even integers not shown on this sketch.
7 8 9
10
11
12
13 14
n
-1
-2
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
36 / 58
Chapter 2: Dst-Time Signals & Systems
Chapter 2: Dst-Time Signals & Systems
Input-Output Description of Dst-Time Systems
Classification of Discrete-Time Systems
Common System Properties:
input/
excitation
x(n)
I
output/
response
Discrete-time
signal
Discrete-time
signal
I
y(n)
Discrete-time
System
Input-output description (exact structure of system is unknown
or ignored):
y (n) = T [x(n)]
“black box” representation:
37 / 58
time-invariant
vs.
time-variant
linear
vs.
nonlinear
causal
vs.
non-causal
stable
vs.
unstable systems
..
.
38 / 58
Chapter 2: Dst-Time Signals & Systems
Static vs. Dynamic
Static vs. Dynamic
I
I
dynamic
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
Chapter 2: Dst-Time Signals & Systems
I
vs.
..
.
T
x(n) −→ y (n)
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
static
Static system (a.k.a. memoryless): the output at time n
depends only on the input sample at time n; otherwise the
system is said to be dynamic
Consider the general system:
y (n)
= T [x(n − N), x(n − N + 1), · · · , x(n − 1), x(n), x(n + 1),
· · · , x(n + M − 1), x(n + M)],
a system is static iff (if and only if)
y (n) = T [x(n), n]
N, M > 0
I
For N = M = 0, y (n) = T [x(n)], the system is static.
I
For 0 < N, M < ∞, the system is said to be dynamic with finite
memory of duration N + M + 1.
I
For either N and/or M equal to infinite, the system is said to
have infinite memory.
for every time instant n.
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
39 / 58
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
40 / 58
Chapter 2: Dst-Time Signals & Systems
Chapter 2: Dst-Time Signals & Systems
Static vs. Dynamic
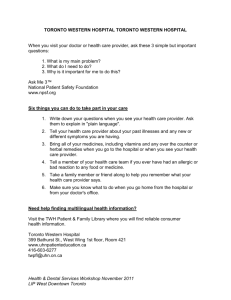
Discrete-Time Bounded Signals
Examples: memoryless or not?
I
I
I
I
I
I
I
I
x[n]
y (n) = A x(n), A 6= 0
y (n) = A x(n) + B, A, B, 6= 0
π
y (n) = x(n) cos( 25
(n − 5))
y (n) = x(−n)
y (n) = x(n + 1)
1
y (n) = 1−x(n+2)
x[n]
n
n
|x[n]|
|x[n]|
n
y (n) = e 3x(n)
P
y (n) = nk=−∞ x(k)
n
x[n]
x[n]
BOUNDED SIGNAL
n
UNBOUNDED SIGNAL n
Ans: Y, Y, Y, N, N, N, Y, N
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
41 / 58
Chapter 2: Dst-Time Signals & Systems
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
42 / 58
Chapter 2: Dst-Time Signals & Systems
The Convolution Sum
The Convolution Sum
Let the response of a linear time-invariant (LTI) system to the unit
sample input δ(n) be h(n).
T
δ(n) −→ h(n)
Recall:
x(n) =
∞
X
T
δ(n − k) −→ h(n − k)
x(k)δ(n − k)
T
α δ(n − k) −→ α h(n − k)
k=−∞
T
x(k) δ(n − k) −→ x(k) h(n − k)
∞
∞
X
X
T
x(k)δ(n − k) −→
x(k)h(n − k)
k=−∞
k=−∞
T
x(n) −→ y (n)
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
43 / 58
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
44 / 58
Chapter 2: Dst-Time Signals & Systems
Chapter 2: Dst-Time Signals & Systems
The Convolution Sum
Finite vs. Infinite Impulse Response
Implementation: Two classes
Finite impulse response (FIR):
Therefore,
y (n) =
∞
X
y (n) =
x(k)h(n − k) = x(n) ∗ h(n)
M−1
X
)
h(k)x(n − k)
nonrecursive systems
k=0
k=−∞
Infinite impulse response (IIR):
for any LTI system.
y (n) =
∞
X
)
h(k)x(n − k)
recursive systems
k=0
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
45 / 58
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
Chapter 2: Dst-Time Signals & Systems
Chapter 2: Dst-Time Signals & Systems
System Realization
Building Block Elements
General expression for Nth-order LCCDE:
N
X
k=0
ak y (n−k) =
46 / 58
M
X
bk x(n−k)
Adder:
+
Unit delay:
a0 , 1
k=0
Constant multiplier:
Initial conditions: y (−1), y (−2), y (−3), . . . , y (−N).
Need: (1) constant scale, (2) addition, (3) delay elements.
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
Signal multiplier:
47 / 58
+
Unit advance:
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
48 / 58
Chapter 2: Dst-Time Signals & Systems
Chapter 2: Dst-Time Signals & Systems
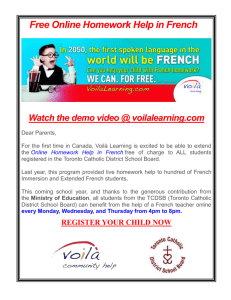
Direct Form I IIR Filter Implementation
v(n)
+
ak y (n − k) +
k=1
M
X
bk x(n − k)
k=0
is equivalent to the cascade of the following systems:
...
bk x(n − k)
nonrecursive
| {z }
k=0
input 1
N
X
y (n)
= −
ak y (n − k) + v (n) recursive
|{z}
|{z}
k=1
output 2
input 2
v (n)
=
|{z}
output 1
+
+
+
+
+
+
...
M
X
+
...
y (n) = −
N
X
+
...
Direct Form I vs. Direct Form II Realizations
+
LTI All-zero system
LTI All-pole system
Requires: M + N + 1 multiplications, M + N additions, M + N memory locations
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
49 / 58
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
Chapter 2: Dst-Time Signals & Systems
Chapter 2: Dst-Time Signals & Systems
Direct Form II IIR Filter Implementation
+
Direct Form II IIR Filter Implementation
Adder:
+
+
+
+
+
Unit delay:
+
+
+
Constant multiplier: +
+
+
Unit advance:
+
+
+
+
...
+
+
...
Signal multiplier:
...
...
+
...
...
+
...
+
...
+
LTI All-pole system
50 / 58
For N>M
LTI All-zero system
Requires: M + N + 1 multiplications, M + N additions, M + N memory locations
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
51 / 58
Requires: M + N + 1 multiplications, M + N additions, max(M, N) memory
locations
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
52 / 58
Chapter 3: The z-Transform and Its Applications
Chapter 3: The z-Transform and Its Applications
The Direct z-Transform
I
Region of Convergence
Direct z-Transform:
X (z) =
∞
X
x(n)z −n
I
the region of convergence (ROC) of X (z) is the set of all values
of z for which X (z) attains a finite value
I
The z-Transform is, therefore, uniquely characterized by:
n=−∞
I
Notation:
X (z)
≡
1. expression for X (z)
2. ROC of X (z)
Z{x(n)}
Z
x(n) ←→ X (z)
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
53 / 58
Chapter 3: The z-Transform and Its Applications
54 / 58
Chapter 3: The z-Transform and Its Applications
ROC Families: Finite Duration Signals
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
ROC Families: Infinite Duration Signals
55 / 58
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
56 / 58
Chapter 3: The z-Transform and Its Applications
Chapter 3: The z-Transform and Its Applications
z-Transform Properties
Property
Notation:
Common Transform Pairs
Linearity:
Time shifting:
Time Domain
x(n)
x1 (n)
x2 (n)
a1 x1 (n) + a2 x2 (n)
x(n − k)
z-Domain
X (z)
X1 (z)
X2 (z)
a1 X1 (z) + a2 X2 (z)
z −k X (z)
z-Scaling:
Time reversal
Conjugation:
z-Differentiation:
Convolution:
an x(n)
x(−n)
x ∗ (n)
n x(n)
x1 (n) ∗ x2 (n)
X (a−1 z)
X (z −1 )
X ∗ (z ∗ )
dX (z)
−z dz
X1 (z)X2 (z)
ROC
ROC: r2 < |z| < r1
ROC1
ROC2
At least ROC1 ∩ ROC2
At least ROC, except
z = 0 (if k > 0)
and z = ∞ (if k < 0)
|a|r2 < |z| < |a|r1
1
< |z| < r1
r1
2
ROC
r2 < |z| < r1
At least ROC1 ∩ ROC2
1
2
3
4
5
6
Signal, x(n)
δ(n)
u(n)
an u(n)
nan u(n)
n
−a u(−n − 1)
−nan u(−n − 1)
7
cos(ω0 n)u(n)
8
among others . . .
sin(ω0 n)u(n)
9
an
cos(ω0 n)u(n)
10
an
sin(ω0 n)u(n)
z-Transform, X (z)
1
1
1−z −1
1
1−az −1
az −1
(1−az −1 )2
1
1−az −1
az −1
(1−az −1 )2
1−z −1 cos ω0
1−2z −1 cos ω0 +z −2
z −1 sin ω0
1−2z −1 cos ω0 +z −2
1−az −1 cos ω0
1−2az −1 cos ω0 +a2 z −2
1−az −1 sin ω0
1−2az −1 cos ω0 +a2 z −2
ROC
All z
|z| > 1
|z| > |a|
|z| > |a|
|z| < |a|
|z| < |a|
|z| > 1
|z| > 1
|z| > |a|
|z| > |a|
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
57 / 58
Professor Deepa Kundur (University of Toronto)Introduction to Digital Signal Processing
58 / 58