A Genetic Algorithm Approach for Optimal Distribution Feeder
advertisement

A Genetic Algorithm Approach for Optimal Distribution
Feeder Restoration During Cold Load Pickup
Sudhakar Chavali
Anil Pahwa
Sanjoy Das
Department of Electrical and Computer Engineering
Kansas State University
Manhattan, KS 66506
Abstract: Restoration of distribution feeders after long
interruptions creates cold load pickup conditions due to loss
of diversity among the loads. The distribution system load
may have to be restored step-by-step using sectionalizing
switches under such conditions to prevent overheating of
substation transformer. The restoration time is dependent on
the order in which sections are restored. A method based on
genetic algorithm to find the globally best restoration
sequence of sections is presented in this paper. Results
obtained using this method for a test case are presented.
Keywords: Distribution system restoration, cold load pickup,
genetic algorithm, mutation, and genetic edge recombination.
enduring load demand may result in excessive transformer
heating.
Heating is the limiting factor in transformer loading. As
per ANSI /IEEE Transformer loading guide C57.91 – 1995
[3], for 65 0C average winding rise transformers limitations
are; maximum top-oil temperature of 110 0C, maximum
hottest-spot winding temperature of 180 0C, 4% loss of life
in any one emergency operation and maximum short time
loading of 2 • SR, where SR is the nameplate rating of the
transformer.
B. Step by step restoration:
I.
INTRODUCTION
A. Cold load pickup:
Distribution systems are used to feed power to various
loads such as air conditioners, lighting, heating, electronic
equipment, etc. These loads can be classified as cyclic
loads and non-cyclic loads. Cyclic loads such as air
conditioners, refrigerators, space heaters, water heaters,
etc., are generally thermostatically controlled. Non-cyclic
loads such as lights, washing machines are manually
switched as per user requirements. During normal
operation diversity among the loads persists and aggregated
load on the substation transformers would be less than the
connected load. If a distribution system experiences an
extended outage, the diversity among these loads would be
lost and during restoration undiversified load demand may
be much higher than the distribution substation capacity.
This condition is known as cold load pickup.
The cold load pickup has four stages [1,2]. These four
stages are 1) inrush current, 2) motor starting current, 3)
motor running current and 4) enduring demand. The first
three stages are transient and generally last for about 15
seconds and the load during these stages will be about 3 to
15 times the normal load. The enduring demand on the
system remains until the normal diversity among the loads
is regained. The enduring load may vary from 2 to 5 times
normal load and it may last for several hours depending on
rate of load decay. Under certain conditions all of the
system load during cold load pickup cannot be restored
simultaneously as overloading of transformers due to
0-7803-7282-4/02/$10.00 ©2002 IEEE
Sectionalizing switches can be used on distribution
system feeders to restore the load in steps in case total load
on the system cannot be restored in one step. The shortterm load level and its duration during step-by-step
restoration can be determined based on thermal
characteristics and loading limitations of the transformer.
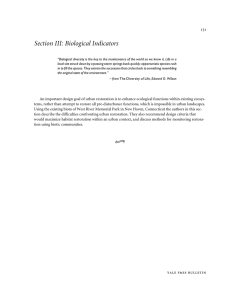
To model the aggregate load during cold load pickup a
delayed exponential model as shown in Fig. 1 is used [4].
Where S(t) is load as a function of time, Tout is the outage
duration, SU is the undiversified load, SD is the diversified
load, α is the rate of load decay, and ∆ t is the
undiversified load duration.
S(t)
SU
α
SD
Tout
∆t
Fig. 1. Cold load pickup model
t (time)
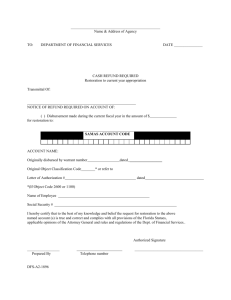
Fig.2 shows single line diagram of a distribution feeder
typical system with automatic sectionalizing switches [4].
Since sections 1, 2, 3; 4, 5; 6, 7 and 8, 9, 10 are on four
different feeders, in the order mentioned, the precedence
constraints are 1st ! 2nd ! 3rd ; 4th ! 5th ; 6th ! 7th and 8th
th
th
! 9 ! 10 . In other words section 3 cannot be restored
unless the sections 1 and 2 are restored.
have 10! (3,628,800) combinations. Although some
combinations are not valid due to precedence constraints of
sectionalizing switches the total number of valid
combinations is still quite high. Hence, it is very time
consuming to calculate the restoration times of all valid
sequences among all the possible combinations to find the
best restoration sequence.
C. Optimization of Restoration Sequence:
Section 1
Section 2
Section 3
Section 4
Section 5
Section 6
Section 7
Circuit Breaker
Section 8
Section 9
Section 10
Sectionalizing Switch
Transformer
Fig.2. One line diagram of a distribution system
The sequence in which sectionalizing switches are
closed is important since different sequences would result
into different restoration times, as undiversified loads of
sections are not the same. Restoration time is the time at
which the last sectionalizing switch in the sequence is
closed. Some of the restoration sequences are not valid
because of precedence constraints. For example, (1 4 6 2 8
7 9 10 3 5) is a valid sequence whereas (4 3 6 8 1 7 5 9 2
10) is not so, since section 3 appears before 1 and 2 in the
sequence.
The restoration time of different sequences can be
calculated from [4], which is given by,
k −1
T[k] =
ln
S MT
− SU [ k ] − ∑ S D [ i ]
k −1
∑ (S
i =1
U [i ]
i =1
− S D [ i ]) e
, (1)
α ( T [ i ] + ∆ t [ i ])
Where,
T[i]
α[i]
SMT
SU[i]
SD[i]
∆[i]
– Restoration time of ith section, hr
– Rate of load decay of ith restored
section, 1 / hr
– Maximum transformer capacity, VA
– Undiversified load of ith section, VA
– Diversified load of ith section, VA
– Undiversified load duration or time
delay of ith restored section, hr
We need to optimize the restoration sequence of
sections so that restoration time is minimized. Some of the
combinations would give the same restoration time since
more than one section can be restored in the first step. The
main problem is to find optimal solution from a large
search space. Even a small system with 10 sections will
0-7803-7282-4/02/$10.00 ©2002 IEEE
Ucak and Pahwa [4] used an adjacent pair wise
interchange method (APIM) for minimizing the restoration
time. The maximum and minimum restoration times of the
system are 326.1 minutes and 275.14 minutes. The
disadvantage with APIM approach is that the resulting
sequence will not guarantee the global minimum. The best
sequence obtained from a run of APIM is (1 8 6 9 4 10
7 2 3 5) with restoration time of 282.6 minutes. The
global search gave the sequence (1 2 8 9 3 4 10 6 7 5)
with restoration time of 275.14 minutes. A genetic
algorithm approach for optimizing the order of restoration
of sections during cold load pickup is presented in this
paper.
II. THE GENETIC ALGORITHM
Genetic algorithms [5] are stochastic search algorithms
based on principles of natural evolution. These algorithms
maintain a large population of interacting individuals,
where each individual represents a potential solution to the
problem. This population is constantly pruned to maintain
constant size by applying the Darwinian criterion of
survivability. This is possible by assigning a fitness value
to each individual. The fitness function should be
appropriately chosen to reflect the quality of the individual.
The creation of new individuals (offspring) from old ones
(parents) takes place through reproduction. Beneficial
‘genes’ are passed on from parent to offspring. When the
reproduction is sexual, multiple parents, usually two, are
involved to produce offspring. This operation is called
crossover. Mutation is another operation that is applied to
the individuals. Mutation introduces genetic diversity to a
finite population, thereby allowing the search process to
explore new regions of the solution space. Genetic
algorithms have been successfully applied to a wide range
of NP-hard combinatorial optimization problems.
The sequence of operation typical in a genetic algorithm
is shown below,
t = 0;
P0 = initial_population();
while (termination_condition = false) do
Pintermediate = selection(Pt);
Poffspring = crossover(Pintermediate);
Poffspring = mutation(Poffspring);
t=t+1
Pt = Poffspring;
end
Our approach was to generate an initial population of
valid individuals in a random manner. Each individual was
a sequence of sectionalizing switches, i.e. a permutation of
the sequence 1, 2,…, n. where n is the total number of
switches. We define for each switch i, Pred(i), to be a set of
switches whose restoration should precede that of i. For
instance, Pred(10) = {8, 9} in Figure 1, since the switches
numbered 8 and 9 should be restored before that numbered
as 10. A sequence is represented as S = (s1 s2, … sn), where
each si is a switch number. A sequence is valid if for each
switch si in S, the switches in the set Pred(si) appear before
si in S.
The algorithm proceeds iteratively to improve the
population by means of selection, mutation and crossover
that are discussed below.
Selection: The better individuals are selected
probabilistically from the population to create an
intermediate population (Pintermediate), based on the fitness
function. If fi denotes the fitness of the ith individual then
the probability of selection was given by pi = fi/Σfj. In our
approach, the fitness was computed as,
every other iteration, if the last switch to be inserted into
the offspring O was i, a new switch is picked from either
nbd(i, P1) ∩ Ready, or from nbd(i, P2) ∩ Ready at random.
As an example consider the two parent sequences P1 = (1 4
8 2 6 9 10 7 3 5) and P2 = (8 1 4 9 6 2 5 7 10 3). The set
Ready is initialized to Ready = {1, 4, 6, 8}. If switch 1 is
selected in the first iteration, the switch 2 becomes ready
for restoration, and Ready = {2, 4, 6, 8}. The offspring O is
now (1). The next switch to be inserted will be picked
randomly from nbd(1, P1) ∩ Ready = {4} or nbd(1,
P2) ∩ Ready = {4, 8}.
Occasionally, before the offspring has been fully
determined, if the switch i was last inserted into the
offspring, the sets nbd(i, P1) ∩ Ready as well as nbd(i,
P2) ∩ Ready are found to be empty. In such a case, any
other switch in Ready is picked at random for insertion into
the offspring. Since this switch is not determined from
either parent, the proposed crossover algorithm contains an
intrinsic mutation. We found that an external mutation
(simply called mutation) had to be added for faster
convergence.
Mutation:
fi =
max(T[ k ] ) − T[ i ]
k
max(T[ k ] ) − min (T[ k ] )
k
k
where each T[k] is determined by Equation 1.
Crossover: The crossover operator was a variant of the
well-known edge recombination method [6]. It was
modified to ensure that offspring produced by valid parents
preserve their validity. The crossover algorithm starts with
an empty sequence. In each iteration a new section switch
is inserted into the sequence, in the proper order. In order to
create a valid sequence, a switch, i, can only be selected
only if all switches in Pred(i), have already been restored.
The algorithm maintains a set of switches that are ready for
restoration, called ‘Ready’. Each time a new switch, i, is
inserted into a partially complete sequence, it is removed
from this set, and other switches become available for
restoration, are inserted into it. The switches j such that
each switch in Pred(j) ∈ S are those that are ready for
restoration.
We define the neighborhood nbd(i,S), to be the set of
switches that are adjacent to switch i in any given sequence
S. For instance in the sequence S = (1 4 8 2 9 6 10 7 3 5),
nbd(8,S) = {2, 4}.
Within each iteration, the crossover operation picks two
parent sequences at random, P1 and P2, and the offspring O
is initialized to an empty sequence ( ). The set ‘Ready’ is
then initialized to contain only the first switches in each.
Since both P1 and P2 are valid sequences, the first switch
appearing in each is in Ready. The first switch in either P1
or P2 is inserted into O as its first switch. Subsequently in
0-7803-7282-4/02/$10.00 ©2002 IEEE
The mutation operator is applied to each sequence with
a probability µ, called the mutation rate. During mutation, a
left switch is picked at random from the sequence. The
position of the left switch is then swapped with that of a
right switch, which is determined in the following manner,
in order to preserve the precedence constraint. If i is the left
switch, another switch appearing to its right, j, is
determined such that i ∈ pred(j), and every other switch k
such that i ∈ pred(k) appears after j. Clearly, i cannot be
exchanged with any switch that appears after j since that
would violate the precedence constraints. We therefore
have to pick the right switch within the subsequence whose
limits are defined by i and j. We then choose a switch l in
this subsequence that belongs to a feeder other than that of i
and which has no predecessor (a switch in pred(l) that
appears to its left in the subsequence). The switch l is the
right switch. Finally, the positions of i and l are
interchanged.
As an example, in the sequence P1 = (1 4 8 2 6 9 10 7 3
5) switches 4 and 6 can be swapped to obtain a new
offspring (1 6 8 2 4 9 10 7 3 5). But, switches 1 and 9
cannot be swapped as that will result into an invalid
sequence of (9 4 8 2 6 1 10 7 3 5), in which switch 2
appears before switch 1 and switch 9 appears before switch
8.
The two genetic operators, edge recombination and
mutation, discussed above, have the advantage that by
applying these operators to the sequences in Pintermediate and
Poffspring the resulting offspring will follow the precedence
constraints as defined by Pred(si). Also duplication of
switches in the offspring is avoided thereby validity of all
the offsprings, with regard to precedence constraint and
duplication, is ensured.
III. RESULTS
The algorithm is applied on a test system shown in
Fig.1. The diversified and undiversified loads of this
system are given in Table 1.
TABLE 1
DIVERSIFIED AND UNDIVERSIFIED LOADS OF SECTIONS OF
THE TEST SYSTEM
Section
Number
Diversified Load
(MVA)
1
2
3
4
5
6
7
8
9
10
Total
3.0
3.0
2.5
1.5
3.0
6.0
2.5
3.5
4.5
3.5
33
Undiversified
Load
(MVA)
9.0
5.5
6.0
5.0
5.0
9.5
6.0
6.5
11.0
8.0
71.5
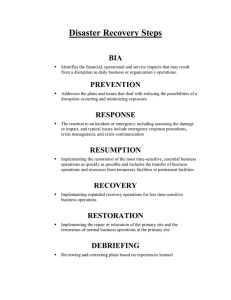
For a randomly chosen initial population of 20 sequences
the genetic edge crossover operator is applied with
probability rate of 100% and mutation is applied with
mutation rate of 10%. After each iteration, 10 offsprings
are generated and better individuals among the parents and
offsprings are chosen for selection process. The algorithm
is stopped after predetermined number of iterations. At the
end of each iteration the minimum and average restoration
times of the corresponding population are noted. An
example plot of this data, at the end of 25 iterations, is
shown in Fig.3.
0-7803-7282-4/02/$10.00 ©2002 IEEE
A sample optimal sequence of switches obtained, by
applying genetic algorithms, is (4 1 8 9 2 3 10 6 7 5) with
global best restoration time of 275.14 minutes.
IV. ACKNOWLEDGEMENTS
The authors gratefully acknowledge the National Science
Foundation for supporting the research through Grant No.
9721447.
V. REFERENCES
[1] O. Ramsaur, “A new approach to Cold Load
Restoration”, Electric World, pp. 101-103, October 6,
1952.
[2] J. E. McDonald, Armin M.Bruning, and W. R. Mahieu,
“ Cold Load Pickup ”, IEEE Trans. Power Apparatus and
Systems, Vol. PAS-98, pp. 1384-1386, July/August 1979.
[3] IEEE Guide for Loading Mineral Oil-Immersed
Transformers, ANSI/IEEE C57.91-1995.
[4] C. Ucak and A. Pahwa, “An analytical approach for
step-by-step restoration of distribution systems following
extended outages”, IEEE Transactions on Power Delivery,
Vol. 9, No. 3, July 1994.
[5] D.E.Goldberg, Genetic Algorithms in Search,
Optimization, and Machine Learning, Addison-Wesley
publishing company, January,1989.
[6] D.Whitley, Tim Starkweather and D’Ann Fuquay,
“Scheduling problems and travelling salesman: the genetic
edge recombination operator”, Proceedings of the Third
International Conference on Genetic Algorithms, Palo
Alto, Ca.: Morgan Kaufmann. Pp. 133-140, 1989.