Digital Image Compression by Outer Product Expansion
advertisement

441
IEEE TRANSACTIONS ON COMMUNICATIONS,VOL. COM-31, NO. 3,MARCH 1983
V. K.Prabhu, “MSK and offsetQPSKmodulationwith
handlimiting filters,” IEEE Trans. Aerosp. Electron. Syst., vol. AES17, Jan. 1981.
S . A. Rhodes, “Effects of hardlimiting on handlimited transmissions with conventibnal and offset
QPSK modulation,” in Proc.
IEEE Nat. Tdecommun. Conf., 1972, pp. 20F/1-20F/7.
G . Satoh and T. Mizuno,“Nonlinear satellite channel de‘sign for
QPSKITDMA transmission,” presented at the 5th Int. Conf. Digital Satellite Commun., Genoa, Italy, Mar. 23-26, 198 1.
J . Huang, K. Feher, and M. Gendron, “Techniques to generate IS1
and jitter-free bandlimited Nyquist signalsand a method to analyze
jitter effects,” IEEE Trans. Commun., vol. COM-27, Nov. 1979.
F. Jager and C. B.Dekker, “Tamed frequency modulation, a novel
methodtoachievespectrumeconomy
in digitaltransmission,”
IEEE Trans. Commun., vol. COM-26, May 1978.
T. Le-Ngoc, K. Feher, and H. Pham Van, “Power and bandwidth
efficient IJF quadrature modulation techniques for linear and nonlinear channels,” in “Regenerative transponders for more efficient
digital satellite systems,:.’ CRC Rep. OSU80-00197.
lntelsat TDMA/DSI System Specification BG-42-65, May 1981,
T. Le-Ngoc and K . Feher, “Performance of IJF-OQPSK modulation schemes in the presence of noise, interchannel and cochannel
interference,” in Proc. IEEE Nat.
Telecommun.
Conf., New
Orleans, LA, Nov. 1981.
R. Lucky, J . Salz, and E. Weldon, Principles of Data Communication. NewYork: McGraw-Hill,1968.
K.
Feher,
Digital
Communications:
Microwave
Applications.
Englewood Cliffs, NJ: Prentice-Hall, 1980.
T. Le-Ngoc,K.Feher,
and H. Pham-Van, ,“New modulation
techniquesforlowcostpowerandbandwidthefficientsatellite
earth stations,” IEEE Trans. Commun., vol. COM-30, Jan. 1982.
M. C. Austinand M. U. Chang,“Quadratureoverlappedraised
cosine modulation,” IEEE Trans. Commun., vol. COM-29, Mar.
1981.
W. Foster and M. Chang, “Performance of several pulse shaping
techniques in nonlinear TDMA environment,” in Proc. IEEE Int.
Conf. Commun., Denver, CO, June ,1981.
D. Divsalar and M. K. Simon, “Performance
of quadrature overlapped raised cosine modulationovet nonlinear satellite channels,”
in Proc. IEEE Int. Conf. Commun., Denver, CO, June 1981.
K. Feher, “Filter,” U.S. Patent 4 339 724, issued July 13,
1982;
Canada Disclosure 327 365, filed May 10, 1979.
-,
Digital Modulation Techniques in an Interference Environment. Gainesville, VA:Don WhiteConsultants,1977.
-,
Digital
Communications:
SatellitelEarth
Station
Engineering. EnglewoodCliffs, NJ: Prentice-Hall,1983.
DigitalImageCompression
by OuterProductExpansion
DIANNE P. O’LEARY
AND
SHMUEL
PELEG
Absrract-We
approximate a digitalimageasa
sum of outer
products dxyT where d is a real number but the vectors x and y have
elements +1, -1, or 0 only. The expansiongives a leastsquares
approximation. Workproportional
is number
theto
of pixels;
reconstruction involves only additions.
INTRODUCTION
Consider the problem of digital image compression: given a
gray level image A of dimension R x n with 0 bits for the gray
level of each of the n2 pixels, store an approximation to A in
less than pn2 bits. The survey papers by Jain [4] and Thomas
[ 7 ] discuss themanytechniquesthathavebeenproposed
for data compression. The technique proposed in this paper
is a “transform technique,” where here the transform
is image
dependent. We approximatetheimagebyanouter-product
expansion:
K
where x k and y k are n X 1vectorswithelementsequal
to
+ I , -1, or 0, and the d , are real constants.
Previous outer product expansions have been of two types.
1)Thevectors
x k and/or y k are
predetermined(for
example, Hadamard-Walsh vectors or Haar vectors). Generally,
K needs to be rather large in order to approximate
A well.
However, there is n o need to store the vectors. The workin
computing each d k is linear in the numberof pixels.
2 ) Thevectors x k and y k areimagedependentbutare
vectors of real numbers. They are usually generated using the
singular value decomposition (SVD) -[[l]31 ,a matrix factorization technique. These are the optimal
x k , y , , and d k in the
sense of minimizing the sum of squares of deviations between
the original and the approximate pixel values, i.e.,
where Xik and Y j k are components of the vectors x k and y k .
The total work is proportional to the number of pixels t o t h e
312 power.
A method of Moler and Stewart [SI,approximates the results of the second algorithm, but in less work. This method
still stores 2K real n-vectors.
Themethodproposedinthispaperusesthesameerror
criterionastheSVDalgorithm,butrestrictstheelements
of vectors x k and y , t o + I , - 1 , and 0 only. bnceyk (or x,)
is chosen,
then
x, (or y k ) and dk minimize
the
resulting
sum of squares of deviations between the current residual pixel
values and the values in the outer product d k X k y k T . The work
Per outer Product is ProPortional to the numberof Pixels.
11. THE
ALGORITHM
The idea is as follows.
F o r k = 1, ..., K
Paper approved by the Editor forSignal Processing and Communica1)
Choose a vectory.
tion Electronics of the IEEE Communications Society for publication
2.1)Giventhecurrent
without oral presentation. Manuscript received October 20, 1981; rey , computethevector
vised September 23, 1982. This work was supported by the Office of
solves the
problem
Naval Researchunder GrantN000014-76-C-0391, by the U.S.-Israel
Binational Science Foundation, and by the National
Science Foundamin r(x, y , d )
tion under Grant MCS-79-23422.
d,X
D. P. O’Leary is with the Departlnent of Computer Science,
Univern
sity of Maryland, College Park,
MD 20742.
S. Peleg was with the Computer Science Center, University of Marywhere
r(x,
y
,
d
)
=
(aii(‘) - dx 1.YI.)?
land, College Park, MD 20742, onleave from the Department ofMathei,j = 1
matics, Ben-Gurion Unversity, Beersheva, Israel. He is now with the Department of Computer Science, Hebrew University, 91904 Jerusalem,
and A(‘) is the current residual picture.
Israel.
0090-6778/83/0300-044 1$01.OO 0 1983 IEEE
x which
442
IEEE TRANSACTIONS
COMMUNICATIONS,
ON
2.2) Given the current x , compute the optimal y and d
t o solve the problem mind,yr(x,y, d ) .
2.3) Repeatsteps 2.1 and 2.2 untiltheimprovement
in
deviation is less than a given threshold.
3)
Prepareforthenextiteration:thecurrentvalues
of
X, y , and d become x k , y k , and d k , and the current picture
is updated as
VOL.NO.
COM-31,
3, MARCH 1983
and
2.3) Findthechangeinthesumofsquares
deviations and the improvement:
of the
n
In detail, the algorithmis as follows.
A , and the numOne is given the original digitized picture
ber K of outer products to be computed.
Initialize the current image,A(') = A , and the residual
! x j I,
newchange = d 2 J
j= 1
improvement =
newchange - change
- and
1
change
n
r=
change = newchange.
ai?.
i,j = 1
F o r k = 1,
K
1) Initializey. (See later notes.)
Initialize change to be 1, improvement to be 1.
2 ) Repeat steps 2.1-2.3 whileimprovement
0.01.
2.1) Given thecurrent y , findtheoptimal
x using
the following procedure:
Let
.a*,
>
where x i = +1 is chosen so that si 2 0 , i = 1, *..,n .
Order theSI'S: S i l 2 Si2 2 ... 2 Si,.
Let
3 ) Set xk = x , yk = y , dk == d , and update the current
picture and residual.
r = r - change.
Possiblechoicesfortheinitial
y vectorsincludethefollowing.
1) The kthy could be the kth Hadamard vector, or a vector
from another common basis set. In the experiments reported
in this work, the Hadamard vectors were generated in order
of increasing number of sign changes as in[ 61.
2 ) Pick t h e largestrow of A ( ' ) anddefine y bythresholding that row. (If
all elements of the row have the same
sign, then y should have only 0's and 1 's, no -1's.)
3) At each iteration, choosey to be the vector of all
1's.
111. PROPERTIES OF THE ALGORITHM
1)Givenanyvector
y , thealgorithmfindstheoptimal
choice forx and d , i.e., the choice which solves
and
f J = max
4.
n
j=l;*.,n
Set XiJ+ = ... X i n = 0.
2.2) Giventhecurrent
x , findtheoptimal
using the following procedure:
Let
n
y and c
where x is constrained to have elements +1, -1, or
0 only.
The proof of this isgiven in the Appendix. Similarly, given
a vector x , t h ealgorithm finds the optimaly andd .
2 ) The loop in step
2 ofthealgorithmisguaranteedto
terminate, since no iteration makes the residual larger; there
are only a finite number
of possible vectors x and y ; and d
is chosenoptimallyforeach
x*y pair.Thus,anytolerance
greater than or equal to zero could be used in place of 0.01.
3) Because all of t h e x and y components are 1, 0, or -1,
each step in the inner loop ( 2 ) requires only 2n
2 multiplicationsand 2n
2 divisions.Updating thecurrentpicture
involves no multiplications or divisions.
4) Reconstructing the approximation later requires at most
K n 2 additionsandsubtractions,andnomultiplicationsor
divisions.
5) As analternative,terminationcouldbebasedonthe
size of A(') rather than a fixed numberK of outer products.
6) Thecostincomputation
is linearinthenumberof
pixels.
7) One disadvantage is that the algorithm is not guaranteed
to ever reduce the residual image to zero, even though any
+
and
f J = max
j=l;.-,n
4.
+
IEEE TRANSACTIONS
ON
443
COMMUNICATIONS, VOL. COM-31, NO. 3, MARCH 1 9 8 3
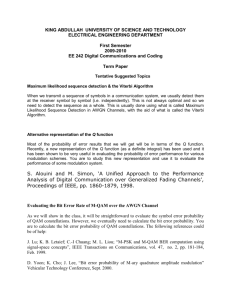
Fig. 1. Example 1: originaland reconstructed pictures. Upper left:
original picture. Upper right: reconstruction from 10 x-y pairs,
0.25 bits/pixel. Lower left: reconstruction from 30 x-y pairs,
0.75 bits/pixel. Lower right: reconstruction from 60 x-y pairs, 1.50
bits/pixel.
Fig. 3. .Example 3: original and reconstructed pictures. As in Fig. 1.
Fig. 4. Example 4: original and reconstructed pictures. As in Fig. 1.
Fig. 2. Example 2: original and reconstructed pictures. As in Fig. 1.
image could be represented as the sum of at most n2 of these
outer products.
8) The processing can be arranged
t o access the image by
rows only. Thus, the algorithm could be run with fast storage
of a few vectors of length n , accessing the image sequentially
from secondary storage.
9) Extension of the algorithm to three-dimensional images
is possible.
IV. EXPERIMENTAL RESULTS
The algorithm was tested on several 64X 64 and 127 x 127
images. Results for the larger images are shown in Figs. 1-4.
Thecoefficientassociatedwitheachvectorpairhad6bit
(onegraylevel)accuracy,
as didtheoriginalpixel
values.
The initialy vectors were Hadamard vectors.
The 127 X 127 reconstructed images do preserve the major
features of the original even at K = 10, and at K = 30 and 60
thedetailimproves.Forpictures
of size 6 4 X 64,about
half as many vectors were needed.
Theaverageerrorperpixeldecreasedrapidlyatfirstand
then more slowly. The average errors and average number of
choices of y vectors per iteration aregiven in Table I.
Storage required per outer productis about 6 2- 127 logz
3
or approximately 410 bits. Thus, the storage required for
10,
30, and60iterations
is 0.25,0.76,and1.5bitsperpixel,
respectively. Significant further compression could be achieved
by run length encodingof the vectors. (See Fig.5.)
Using an initial y vector of all 1’s at each iteration, or using
each Hadamard vector for two iterations instead of one, made
little change in the pictures or errors but increased the number
of inner iterations. For the vector of all
1’s for the picture
in Fig. 3, for example, the average number of
y choices was
9.2.
The final error levels were limited by the truncation of the
numbers dj t o integral gray levels. To obtain more accuracy,
butstillrestrictarithmetic
t o 6bitaccuracy,theresidual
imagecanbe
scaled upwardbyapowerof
two whenever
all elements have been reduced sufficiently, and the algorithm
can be applied to this rescaled image.
+
V . CONCLUSIONS
We havepresentedanalgorithmforimagecompression
which(experimentally)achievesastoragerate
of 1bitper
pixel without much loss of information.
444
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. COM-31, NO. 3, MARCH 1983
TABLE I
where we have defined
Average error pixel
per
Average
number
of y choices
k=10
Fig. 3
23.1
Fig. 4
33.1
k=30
Now, the first term in our expression for r ( x , y ,d ) is constant,
and the signs of the xi’s do not affect the last term. Thus, to
minimize Y , the signs shouldbechosen
so thatallthe
si’s
have the same sign, positive if d 0.
Now let J be the number of nonzeroxis. Then
4.1
4.8
2.6
>
i,j = 1
n
n
- 2 d ~ s i f d 2 JIyjI.
~
i= 1
j= 1
For aparticularchoiceof
x, the d whichminimizesthisis
found by setting ar(x,y,d ) / a d = 0. This gives
Using this value gives
APPENDIX
PROOF OF OPTIMALITY
Here we show that the x computed in step 2.1 of the algorithm solves the problem
n
W
Fig. 5. Display of 60 x-y pairs for the picture of Fig. 4. -1, 0, and 1
are displayed as black, gray, and white, respectively. The upper row
of the upper partis the firstyand the upper row of the bottom part
is the first x.
Therefore, minimizing ~ ( xy, , d j is equivalent t o maximizing
d2J. For a given number of nonzero x i ’ s , d is maximized by
choosing those xi’s to be the ones corresponding to the largest
sums I X,?=l aijyj I. Thus,wehave
n possiblechoicesof
x
to check: set thexi’s corresponding to the Jlargest
I cy, 1 a v y j I
to - t l or -1
(signchosen
so t h a t a l l si arepositive),find
fromtheformulaabove,andchoosethelargest
the n choices for J .
min r ( x , y , d )
d
d2J among
x,d
ACKNOWLEDGMENT
n
.where (X, Y , d) =
(Ulj“)
- dx iYj)2
i,j = 1
x i = +l,-1, or
We are grateful to A. Rosenfeld for helpful discussions and
t o W. K . Pratt for comments on a draft of the manuscript.
0.
REFERENCES
This is a“mixedintegerprogrammingproblem”with
3”
possible choices for the vector
x, but we will show that the
n of these
solutioncanbecomputedbyexaminingonly
possibilities. The argument is as follows.
Expanding the formula forr ( x , y ,d ) gives
n
( ~ i j ( ‘ ) )~ 2d
=
i,j = 1
2
i= 1
n
n
si
H. C. Andrews and C . L. Patterson, “Singular value decomposition and digital image processing,” IEEE Truns. Acousr., Speech,
Signal Processing, vol. ASSP-24, pp. 26-53, 1976.
”Outer product expansions and their uses in digital image
processing,” Amer. Marh. Mon., vol. 82, pp. 1-13, 1975.
-,
“Outer product expansions and their uses in digital image
processing,”IEEETruns. Compur., vol. ‘2-25, pp. 140-148, 1976.
A. K . Jain,“Imagedatacompression:
A review,”Proc.IEEE,
vol. 69, pp. 349-389, 1981.
C . B . Moler and G . W . Stewart. “An efficient matrix factorization
for digital
image
processing,”
Dep.
Comput. Sci., Univ.
Maryland, College Park, 1978.
W. K . Pratt, J. Kane, and H. (3. Andrews, “Hadamard transform
image coding,” Proc. IEEE, vol. 57, pp. 58-68, 1969.
J . 0 . Thomas, “Digital imagery processing with special reference
to data compression in remote sensing,’’ in Issues in Digital Image
Processing (Proc. 1978 NATO Adv. Study Inst. on Digital Image
Processing), R. M. Haralick and J . C. Simon, Eds. Germantown,
MD: Sijthoff & Noordhoff, 1980, pp. 247-290.
-.