modelling of transmission lines using idempotent

MODELLING OF TRANSMISSION LINES USING
IDEMPOTENT DECOMPOSITION
by
Fernando Jose Marcano
Elec. Eng., Simon Bolivar University, 1993.
A THESIS SUBMITTED IN PARTIAL F U L F I L M E N T OF
THE REQUIREMENTS FOR THE D E G R E E OF
M A S T E R OF APPLIED SCIENCE in
THE F A C U L T Y OF G R A D U A T E STUDIES
D E P A R T M E N T OF E L E C T R I C A L ENGINEERING
We accept this thesis as conforming to the required standard
THE UNIVERSITY OF BRITISH C O L U M B I A
August, 1996
© Fernando Jose Marcano, 1996
In presenting this thesis in partial fulfilment of the requirements for an advanced degree at the University of British Columbia, I agree that the Library shall make it freely available for reference and study. I further agree that permission for extensive copying of this thesis for scholarly purposes may be granted by the head of my department or by his or her representatives. It is understood that copying or publication of this thesis for financial gain shall not be allowed without my written permission.
Department of
The University of British Columbia
Vancouver, Canada
DE-6 (2/88)
11
ABSTRACT
The modelling of wave propagation in multiconductor transmission line involves full matrices for the wave propagation and characteristic impedances functions. Modal decomposition, as in the fdLine model in the EMTP, leads to an elegant and numerically efficient solution, even in the presence of frequency dependent parameters.
The advantages of modal decomposition are lost, however, when the transformation matrix relating modal and phase quantities cannot be assumed constant and real but is complex and changes with frequency. This is the case, for instance, when there is strong conductor asymmetry in multicircuit transmission lines and cable systems.
A number of alternatives have been proposed to solve the problem of frequency dependent transformation matrices: from frequency synthesis of the transformation matrices to working directly in the phase domain. Both of these approaches, however, have drawbacks. Direct synthesis of the transformation matrices with stable rational functions is difficult because the eigenvectors that make up the columns of these matrices are not uniquely defined at each frequency point. Direct phase-domain modelling is also difficult because an Af-phase transmission line has TV propagation modes and N time delays and the N
2
elements of [A p h a s e
] are a combinations of these basic travelling times and modes.
The idempotent Line Model (idLine) expresses the line propagation function as a matrix directly in phase coordinates [A p h a s e
] (thus avoiding modal transformation matrices), but the expression is in terms of the N natural propagation modes (thus avoiding mixed-up travelling times). With idempotent decomposition, the line
Ill propagation matrix can be written as a combination of the modal propagation functions with the idempotent matrices as weighting factors. As opposed to the eigenvectors, which are defined only up to an arbitrary complex constant, the idempotent coefficient matrices are uniquely defined at each frequency point.
In the idempotent line model, each scalar modal propagation function is synthesised in the frequency domain using a rational function approximation for the wave shaping and the mode's travelling time for the wave delay. The elements of the idempotent matrices are relatively simple functions of frequency that can also be synthesised using rational function approximations.
The proposed model is very accurate and numerically stable. A number of simulations are presented and comparisons are made between the new model, the traditional fdLine model, and the "exact" solution obtained with the frequency domain program FDTP.
iv
T A B L E O F C O N T E N T S
A B S T R A C T ii
T A B L E OF CONTENTS iv
LIST OF T A B L E S vi
LIST OF FIGURES vii
A C K N O W L E D G E M E N T S x
DEDICATION xi
1. INTRODUCTION : 1
2. THEORETICAL F O R M U L A T I O N . 6
2.1. Transmission Line Equations ; 6
2.2. Idempotent Decomposition of the Propagation Matrix (Phase-Domain) 7
2.3. Matrix [Yc] : 10
2.4. Time Domain Form and Solution Algorithm 10
2.4.1. Phase-domain propagation matrix 12
2.4.2. [Yc] Matrix : ..13
2.4.3. Discrete-Time Equivalent Circuit of the Transmission Line 14
3. F R E Q U E N C Y D O M A I N A N A L Y S I S 16
3.1. Fitting of the Idempotent Functions 16
3.1.1. Pole Location 17
3.1.2. Fitting with Common Poles 18
3.2. Fitting of the Modal Propagation Functions 20
V
3.3. Expression for the Phase-Domain Propagation Matrix 21
3.4. Fitting Results 22
3.4.1. Single-Circuit Transmission Line 22
3.4.2. Double-Circuit Transmission Line 26
3.4.3. Triple-Circuit Transmission Line 30
4. TIME D O M A I N SIMULATIONS 36
4.1. Steady State Simulation 36
4.2. Open Circuit Test 37
4.3. Short Circuit Test 40
4.4. Trapped Charge Test 43
5. CONCLUSIONS..; 46
BIBLIOGRAPHY 49
APPENDIX I. Frequency-Domain Transmission Line Equations 51
APPENDIX II. Trapezoidal Integration of Matricial Partial Fractions 53
APPENDIX III. Fitting of a Rational Function with Given Poles 55
vi
LIST O F T A B L E S
Table 3-1. Conductor parameters for single-circuit (flat) transmission line 23
Table 3-2. Fitting poles for single-circuit (flat) transmission line 23
Table 3-3. Conductor parameters for double-circuit transmission line 27
Table 3-4. Fitting poles for double-circuit transmission line 27
Table 3-5. Parameters for triple-circuit transmission line 31
Table 3-6. Fitting poles for triple-circuit transmission line 31
Table 4-1. Steady state currents in triple-circuit transmission line ; 37
Vll
LIST O F F I G U R E S
Figure 2-1. Transmission Line Equivalent Circuit (frequency domain) 7
Figure 2-2. Matricial partial fraction input-output relationship , 11
Figure 2-3. Discretized Time-Domain equivalent circuit 15
Figure 3-1. Simple pole-reduction procedure principle 18
Figure 3-2. Configuration of single-circuit (flat) transmission line 22
Figure 3-3. Magnitude of the diagonal elements of the phase-domain propagation matrix for a single-circuit transmission line 24
Figure 3-4. Magnitude of the off-diagonal elements of the phase-domain propagation matrix for a single-circuit transmission line : 24
Figure 3-5. Phase of the diagonal elements of the phase-domain propagation matrix for a single-circuit transmission line 25
Figure 3-6. Phase of the off-diagonal elements of phase-domain propagation matrix for a single-circuit transmission line. 25
Figure 3-7. Configuration of double-circuit transmission line 27
Figure 3-8. Magnitude of the diagonal elements of phase-domain propagation matrix for a double-circuit transmission line ... 28
Figure 3-9. Magnitude of the off-diagonal elements, column 1, of phase-domain propagation matrix for a double-circuit transmission line 29
Figure 3-10. Phase of the diagonal elements of phase-domain propagation matrix for a double-circuit transmission line 29
Vlll
Figure 3-11. Phase of the off-diagonal elements, column 1, of phase-domain propagation matrix for a double-circuit transmission line ; 30
Figure 3-12. Triple-circuit transmission line configuration.... 31
Figure 3-13. Magnitude of elements (1,1) (2,2) (3,3) of phase-domain propagation matrix for a triple-circuit transmission line 32
Figure 3-14. Magnitude of elements (7,7) (8,8) (9,9) of phase-domain propagation matrix for a triple-circuit transmission line. 33
Figure 3-15. Magnitude of elements (1,2) (3,2) (4,2) (5,2) of phase-domain propagation matrix for a triple-circuit transmission line 33
Figure 3-16. Magnitude of elements (6,2) (7,2) (8,2) (9,2) of phase-domain propagation matrix for a triple-circuit transmission line 34
Figure 3-17. Phase of elements (1,1) (2,2) (3,3) of phase-domain propagation matrix for a triple-circuit transmission line 34
Figure 3-18. Phase of elements (1,2) (3,2) (4,2) (5,2) of phase-domain propagation matrix for a triple-circuit transmission line 35
Figure 4-1. Steady state test configuration 36
Figure 4-2. Open circuit test configuration 38
Figure 4-3. Open circuit test. Voltage on phase 4 receiving end 39
Figure 4-4. Open circuit test. Voltage on phase 5 receiving end 39
Figure 4-5. Open circuit test. Voltage on phase 6 receiving end 40
Figure 4-6. Short circuit test configuration 41
Figure 4-7. Short circuit test. Voltage on phase 4 receiving end 41
ix
Figure 4-8. Short circuit test. Voltage on phase 5 receiving end 42
Figure 4-9. Short circuit test. Voltage on phase 6 receiving end 42
Figure 4-10. Trapped charge test configuration , 43
Figure 4-11. Trapped charge test. Voltage at the receiving end, phase 1 44
Figure 4-12. Trapped charge test. Voltage at the receiving end, phase 2 44
Figure 4-13. Trapped charge test. Voltage at the receiving end, phase 3 45
Figure 4-14. Trapped charge test. Detail of voltage at the receiving end, phase 3. ...45
X
A C K N O W L E D G E M E N T S
I would like to thank Professor J. R. Marti for introducing me to this interesting topic research, also recognise all his help, advice, and thought-stimulating discussions that made possible the development of this thesis project. • '
In behalf of my supervisor, and myself, I would like to thank Dr. L. M . Wedepohl for introducing the concept of idempotent decomposition to solve the transmission line problem. ,
The timely suggestions of Professor H. W. Dommel and the help of Dr. L. Marti in providing the data for one of the configurations studied are gratefully acknowledged.
Also, I would like to thank Dr. L. M . Wedepohl for making his FDTP program available for use in the test comparisons.
Likewise, I would like to recognise the help of all the power group students at the
University of British Columbia, particularly Fernando Castellanos who was involved in the early stages of the model development, and helped me with many suggestions.
Finally, I would like to thank all the people who contributed directly or indirectly to the development of this thesis project.
To my wife Maria Isabel for her love and patience
To our families for their support and encouragement
1
1. I N T R O D U C T I O N
Transmission lines and underground cables are the main transmission links in power systems. Transmission lines usually extend over many kilometres and are affected by a wide variety. of phenomena, from short-circuits, to switching manoeuvres to lightning discharges. To simulate these and other related phenomena in a power system analyser, accurate transmission line models need to be developed. On the other hand, transmission lines are one of the most complicated elements to be modelled in time-domain transients simulations. A number of transmission lines and underground cable models have been developed ([1, 2]) and successfully implemented. Each one has its own advantages and disadvantages, and they are adequate for certain types of studies and not for others.
The need for a general, accurate, efficient and reliable transmission line model has not yet been fully satisfied, but as more powerful computers are becoming available, transmission line models are also becoming more sophisticated both in modelling details and in tools used.
In order to properly introduce the new model developed in this thesis, a brief description of the most commonly available types of transmission lines models is first made.
Transmission line models can be divided into two main groups: frequency domain models
and
time domain models.
The
frequency domain models
describe the transmission
line one frequency at the time over the frequency band and transform the frequency response into a time response using time-frequency transformations such as the Fast
2
Fourier Transform. Since the line is modelled one frequency at a time, these models make no approximation when modelling the frequency behaviour of the line and are able to model its response very accurately. Frequency domain solutions, though very accurate for transmission lines, have some disadvantages in time domain simulations and their usefulness is limited to special cases.
In direct time domain simulations, as in the EMTP program [4], the system solution is obtained at consecutive discrete time points (0, At, 2 At, ...) (discrete time domain). One of the main advantages of this solution is that complicated sequences of events that affect the topology of the network can be easily simulated.
In general, every element that constitutes an electrical network is described by a set of differential equations. In order to obtain the time domain models of these elements, these equations have to be solved (integrated) between discrete time points. In principle, any numerical integration rule can be used to solve these equations. In the case of the
EMTP, the trapezoidal rule is used for this purpose.
Because of its inherently complicated frequency dependence, the set of differential equations that describe a transmission line in the frequency domain is difficult to convert into the time domain without approximations in the frequency functions.
To introduce the proposed line model from a proper perspective, the best known and most widely used transmission lines models in the EMTP are first briefly reviewed, along with their advantages and disadvantages. (A more complete discussion of these models and their features can be found in [5].)
3
PI Circuit
The 7i circuit is the simplest representation of a transmission line. Here, the line is represented with lumped elements: a series impedance and shunt admittances for each line segment. This is the model used by Transient Network
Analysers (TNA). One of the disadvantages of this model is its inability to represent the delay associated with the finite travel time of the waves on the line or to represent the frequency dependence of the line parameters. The model, however, is exact for steady-state calculations.
Constant Parameters (Lossless Line)
The constant-parameter lossless line model was the first line model used in the E M T P [4].
It represents the line as a pure delay and a characteristic impedance. The model assumes that the L and C parameters of the line are not frequency dependent, and that the losses (R) can be lumped externally. In the case of multiple-phase lines, the model equations are diagonalized by means of a constant transformation matrix which decouples the propagation modes and allows solving for n single-phase lines instead.
The main disadvantage of the constant-parameter model is that the relatively strong frequency dependence of the line parameters (L, C and R) is not taken into account. fdLine Model
One of the most successful models to consider the frequency dependence of the parameters in transmission line modelling is the fdLine Model in the EMTP
4
[1].
This model is exact for single phase lines, and very accurate for multiphase lines.
Like in the constant parameters model, the fdLine model represents the line in the modal domain, that is, a matrix transformation is required to convert the quantities (voltages and currents) from the physical phase domain into the decoupled modal domain. Once in the modal domain, the line is solved as n independent single-phase lines.
Although fdLine represents very accurately the frequency dependent nature of each decoupled line mode, it does not take into .account that the transformation matrix (matrix of eigenvectors) to decouple the line is also frequency dependent. In fdLine this matrix is assumed to be constant and real.
This assumption can be inaccurate if the line has a strong asymmetry, or in the case of buried cables.
Qline Model
The QLine model [2] takes into account the frequency dependence of the transformation matrices. To implement this model, the frequency functions that represent the eigenvectors are approximated by rational functions. A difficulty of this model, however, is that eigenvectors are defined only up to a complex constant; thaf is, an eigenvector multiplied by any complex constant (scaling) remains a valid eigenvector. This characteristic makes the synthesis of eigenvector as continuous frequency functions difficult, since inappropriate scalings can make the eigenvector functions not smooth and very difficult to approximate. The case of multiple (repeated) eigenvalues at some frequencies further complicates the
5 definition process since an entire family of base eigenvectors functions is possible in this case.
The model presented in this thesis overcomes the mentioned problems of eigenvector synthesis by avoiding the use of eigenvectors as base functions for the modal decomposition. Instead, the line propagation function (matrix function) is written directly in phase coordinates as a linear combination of the natural modes of propagation (scalar functions) with idempotent matrix coefficients (spectral decomposition).
Objectives of this thesis
The main objective in this thesis has been to develop a new transmission line model where no approximations are made when translating the frequency domain propagation characteristics of a transmission line into the time domain, that is, to develop a "fully frequency-dependent line model".
The model was developed using an EMTP-like type of solution, in such a way that the implementation in a transients program is straightforward.
The theoretical formulation of the model is developed in chapter 2. In chapter 3 we develop the frequency domain analysis of the model and present frequency synthesis results for single- and multiple-circuit overhead transmission line configurations. In chapter 4 we present results of time domain simulations on a number of test cases, as well as comparisons with the fdLine and FDTP line models. Finally, in chapter 5 we present the conclusions.
6
2. THEORETICAL FORMULATION
In this chapter, the developing of the proposed model is started by solving the well known transmission line equations. This provides a circuit equivalent for the transmission line in the frequency domain, which can then be translated into the time domain.
2.1. Transmission Line Equations
The behaviour of the transmission line in the frequency domain is summarised in the following set of equations (Line Equations): found: r i
1
5 [I]
r nr i
(2-1)
OX
Differentiating equation 2-1 with respect to x, the propagation equations are d
2
[V] dx
2
= [Z][Y][V] d
2
[l] dx
1
= [Y][Z][I]
The solution of 2-2 can be expressed as (see Appendix I for details)
[nK]-[/.]
=
e
+
'
1
'([nIn]
+
[/
4
]) = [^lF
4
] l
Y
M ] - [h } = e' b
'
]
'{[Y c
}[V m
]
+
[/J) = [A phase
}[F m
]
(2-?)
(2-3)
Where currents and voltages are defined in Figure 2-1. Subscripts k and m stand for sending and receiving end, respectively, / is the line length, and matrices [ Y
7
] and
[l^] are defined as ,
(2-4)
Equations 2-3 can be represented by the circuit shown in Figure 2-1. As shown in this circuit, there is no topological connection between the two ends of the transmission line, the only coupling is through the current sources.
[J m
]=[A phase
]([YJ[V k
]+[I k
])
[J k
]=[A phase
]([Y c
][V m
]+[IJ)
T
1 *1
Figure 2-1. Transmission Line Equivalent Circuit (frequency domain).
2.2. Idempotent Decomposition of the Propagation Matrix (Phase-Domain)
The solution of equations 2-2 for multiphase transmission lines is normally based on Wedepohl/Hedman's theory ([3, 6]) of modal decomposition. Basically it consists in performing a matrix transformation of the phase voltages and currents so that the resultant matrix equation set is diagonal and, therefore, treatable as n single-phase lines.
Mathematically the phase-domain propagation matrix [A(s)] = e~^'^' is transformed, through a transformation matrix [Q], such that [^C*)] = [Q ] \d(s )\Q] is diagonal.
In general, matrix [Q] is frequency dependent, which leads to convolutions in time domain solutions.
The time domain convolutions can be avoided i f the transformation matrix [Q] is synthesised with rational functions, thus allowing the application of well-known recursive
8 techniques ([11]). As indicated in the introduction, the main problem with this approach is the indeterminacy (scaling) of the frequency functions (eigenvectors) that constitute
[Q(s)].
This problem is aggravated in the case of repeated eigenvalues.
The indeterminacy problem is eliminated when the formulation is established in terms of idempotents [9] since the idempotents are unique regardless of the particular scaling of the eigenvectors, (this decomposition is also called spectral decomposition by some authors [15].)
The idempotent decomposition can be derived from the relationship between the phase-domain and the modal-domain propagation matrices. From the relationship the idempotent matrices can be obtained as indicated next. (A three-phase line is used to explain the procedure, which applies equally to an N-phase line.)
•Write [Q] in term of its constituent columns:
[0] = [Cj C
2
C j (2-6) where C, are the eigenvectors.
•Write [Q]~
L
in terms of its constituent rows:
[QV -
(2-7)
•Write 2-5 in terms of the column and row partitions in 2-6 and 2-7:
'A
0
0
A
0 0 o" " V
0
* 2
A. A .
(2-8)
which gives
^ ] = [qje ,]4 +[C
2
R
2
]A
2
+[C
3
R
3
]A
3
= [M]A
X
+[M
2
]A
2
+[M
3
]A
3
(2-9) where
[M,] = [C,J?,] (2-10) are the idempotents.
From 2-9, the propagation matrix in the phase domain can be written in compact notation as nModes U*J= HMkode,
(2 -11)
(=1
Where matrix [M
(
] represents the idempotent corresponding to mode and the scalar function A mode
, represents the propagation function of mode i.
To translate the problem from frequency to time domain, the elements of the idempotent matrices can be synthesised with partial fractions. After performing this synthesis, the idempotents can be expressed as
M = W ? [ ^ '
7=1 "
i S +
Pj ( 2
-
1 2 )
It is interesting to note that to obtain equation 2-12 all the elements of [ M
;
] have to be fitted with the same set of. poles, i.e., the expansion of each element of the idempotent matrix should have the same poles as every other element. This issue will be discussed in detail in chapter 3.
The modal propagation functions are fitted also with partial fractions as
10
4 = (2-13)
Where x, is the phase delay of propagation mode i.
Equations 2-12 and 2-13 can be combined as indicated in equation 2-11 giving the following expression for the phase-domain propagation matrix in terms of partial fractions and delays iiModes (n+nPi r -i \
A pha
S e\ =
J
ZZ
K
7=1
J
)
\
< 1
L
J S
+ Pj J
(2-14)
2.3. Matrix [Yc]
The characteristic admittance matrix [Y c
(s)] can be synthesised with rational fractions using the asymptotic fitting techniques of [1]. In addition, like in the idempotents case, the fitting with common poles, i.e., using the same poles for each element of the matrix, results in a very compact and stable realisation:.
(2-15)
7=1
2.4. Time Domain Form and Solution Algorithm
Equations 2-14, 2-15, and the equivalent circuit of Figure 2-1 can be translated easily from the frequency domain into the time domain. The basis for this transformation is the integration over one time step of a "matricial partial fraction". A matricial partial fractions is made up of terms of
11
[G(s)] = [K] s+.p where [K\ and/? are real and constant, and s=j(o.
(2-16)
With reference to Figure 2-2, and using the trapezoidal rule of integration, the following time-domain expression is found (see Appendix II for details of the derivation):
[j (0] = [4 ^(0] + N)] (2-17) ;
•Frequency Domain
; ix
(s)]
Input
[Y(s)]
Output j
WO]
•Time Domain
\y(t)]
Figure 2-2.
Matricial partial fraction input-output relationship.
Where [x(J)]is the input signal, [XO] is the output signal and [h(t)] is a history term defined as
[h(t)] = (b + l)[A][x(t-At] + b[h(t-At)] (2-18)
Constants [A] and b are defined as
(2-19)
2 + pAt
2-pAt
2 + pAt
(2-20)
12
2
.4.1. Phase-domain propagation matrix
In the line equivalent circuit of Figure 2-1, the equivalent current source for node k can be written as (the derivation is similar for node m)
M=[^]kl
(2
-
21) where
N = MW
+
W (2-22)
With [A^] expressed in term of the matrix partial expansion of 2-14, equation 2-21 becomes w = z
i , Jf
;=1
V j=\
= Z Z
1 =1
V
7=1
Integrating each term in 2-23 according to 2-17 to 2-20,
-7ft; nModes n+npi
[/.(')]= Z Z [;]"(')
,=1
V
7=1 with
(2-23)
(2-24)
(2-25) where
[h^(t)] =
(b^+l\A
^lf m
^
(2-26)
At each time step of the simulation, equation 2-24 is first evaluated to obtain the equivalent current source in the time domain model of the line and solve with the rest of the power system network. After solving the network, equation 2-26 is used to update the history sources for the next solution step.
13
In transferring [F m
(^)] and [F k
(s)] into the time domain, another convolution arises due to the multiplication in the frequency domain of the terminal voltage times the characteristic impedance matrix (2-3). This convolution, however, can be avoided with a substitution from the circuit relationships in the time domain expressions. Transferring [F k
(s)] from equation
2-3 into the time domain
From the equivalent circuit in Figure 2-1, the term [y c
(0]*[ v m
(0] c a n
be written as
[ A ( 0 ] = U(0]*[v,
H
(0 ]+K ,(0] (2-27)
* Mo]=[uo]=[ao]+ [uo]
(2-28)
Where [y „,(0]
is the equivalent current source at node m during the solution at time t.
Substituting in 2-27,
[/*(')] = [ U O ] + U „(0] +
[Lit)] = 2[i m
(t)] + [j m
(0] (2-29)
Expression 2-29 contains no convolutions, and is easy to evaluate.
2.4.2. [Yc] Matrix
The handling of the characteristic admittance matrix [Yc] is different from that of the phase-domain propagation matrix. For line end k, defining as the input function [*(/)] in equation 2-17 the terminal voltage [v
A
(0]> and as the output function [y(t)\ the current i yk
(t) , the solution of [i yk
(t)] can be formulated in the following way:
14
[^(5)] = [r c
(.)][F t
(5)] (2-30)
Combining equation 2-30 with equation 2-15,
>(o]=[^
0
]h(o]+E ([4 ]h(o]+h(o])
(2-31)
•• • . /=i
Regrouping terms, r
, f nYc \ nYc i*w ]= KM [4] [v t
(o ]+Z [^(o]v
,=i .
/ ,=i nYc
. [WO =fcI v
*W] + Z [*i(0]
(2-32)
And the history terms are
[^(0] = (6
/
+l )[4 ][v
A a -A0] + 6,^(?-A0^ (2-33)
Equation 2-32 is solved together with the nodal equation of the network, and equation 2-33 is used to update the history current sources. The constants [A
{
] and b, are calculated with equations 2-19 and 2-20.
Notice that, as opposed to the phase-domain propagation matrix [Ap hase
], the [Yc] matrix does not have time delays associated with it.
2.4.3. Discrete-Time Equivalent Circuit of the Transmission Line.
Figure 2-3 shows the time-domain equivalent circuit of the line that results from the discretization of the equations for the phase-domain propagation matrix and characteristic admittance functions discussed above. The current sources in this circuit come from the history terms in both the propagation function and the characteristic admittance function.
15
1 <»«)
? > ! © © • • • © © © - ©
./HO ./HO
./n/Wes l (0
JTV)
Yc Matrix Mode 1 Mode n
Phase Propagation Matrix
Figure 2-3.
Discretized Time-Domain equivalent circuit.
The definition of the history source currents is given in equations 2-25 , 2-26 and
2-33. The term Y c 0
is included into the system's conductance matrix.
16
3.
FREQUENCY DOMAIN ANALYSIS
This chapter describes the synthesis of the model in the frequency domain. That is, how the fittings of the idempotent and propagation functions are made. The first part describes the considerations made for the fitting of the idempotents, mode propagation functions and phase-domain propagation matrix elements. In the last part, synthesis examples are presented from single-circuit and multi-circuit overhead transmission line configurations.
3 .1.
Fitting of the Idempotent Functions
The fitting of the idempotent functions, using partial fractions in the form of equation 2-12 requires that each element of a given idempotent matrix be fitted with the same set of poles. The implications of this requirement are twofold. First, a set of poles has to be determined such that a fitting of each function with this set can be considered a good fit, and second an appropriate algorithm for the fitting with a given set of poles has to be developed.
The normal fitting procedure in [1] takes a scalar complex function and returns the k's and p's (see equation 2-13) of a rational function fit of this function. However,, this algorithm does not have the option of pre-specifying the set of poles with which to perform the fit.
The program TXFIT was written to perform the fitting of a given frequency function with a pre-specified set of poles. This program uses as the driver a modified version of Microtran's LINE CONSTANTS program that can read standard text files.
17
TXFIT calculates eigenvalues and eigenvectors using the technique described in [7] to avoid switching of positions of the eigenvectors. (As already indicated, the scaling of the eigenvectors is immaterial in calculating the idempotents.) TXFIT proceed then to fit all elements of an idempotent matrix with a common set of poles.
3.1.1. Pole Location
From transfer function stability considerations, the location of the poles of the line propagation and characteristic admittance functions could be based on the fact that for a multiple input-output transfer function all the poles that describe the system are contained in the diagonal elements [13]. However, for reasons of flexibility in achieving a good overall fit, the above stability criteria is extended to require all elements of the matrix to share the same set of poles. (Notice that this expanded criterion includes, as a particular case, the condition of membership of the poles in the set of poles of the diagonal elements.)
The procedure for obtaining the common set of poles can be outlined as follows:
• Perform a "normal" fit of each element of a given idempotent matrix. Add the resulting poles to the "augmented set of poles" for all elements.
• Reduce the "augmented set of poles" to a representative subset for all elements.
In the implementation made in this thesis, the second step is performed by scanning all the poles and taking the geometric mean of the ones which
18 logarithmic distance among themselves is less than an arbitrary constant. The procedure can be visualised in Figure 3-1.
Complete set of poles
• I I ill I - na
+ Frequency Axis d ... | d i
d i
d i
d
i
Geometric Mean
• • • d: Arbitrary constant Reduced set of poles
Figure 3-1. Simple pole-reduction procedure principle
3.1.2. Fitting with Common Poles
For the fitting of the idempotent functions with a given set of poles, a least square optimisation in the k's of the partial fraction expansion terms is performed.
For simplicity, only the real part of the idempotent function is taken into account when optimising. This allows the reduction of the problem to a general linear least squares optimisation which can be solved using singular value decomposition.
Singular value decomposition is particularly appropriate in this case because, due to the nature of the problem, sometimes a zero pivot can be found in the solution using the normal equations. This problem arises when the data can be equally well fitted by two or more combinations of the basis functions. In the case of an underdetermined system like this one, singular value decomposition will produce a solution which values are smallest in the least-square sense. (A explanation of the advantages of the use of singular value decomposition over the normal equation can be found in [8].)
19
The optimisation procedure is formulated as follows: for an initial set of constants k, calculate the optimal factors
( by which each one of the &'s has to be multiplied for an optimal fitting in the least square sense. That is, for a given function g((o
(
), and a model specified as find QK such that. nPoles K
N *.,<«> *, • X (3-D k=\ s + p k i
2
= nDala
T nPoles-\ k=\ is a minimum.
The basis functions X
A
(co,) are defined as follows:
(3-2)
X k W = „ i
, 2
- i w
, +Pk
,
2—
(3-3)
% +P„ Pk
For k=l to nPoles - 1, the auxiliary function g\(Oj) (required by the standard form of the least square procedure) is g'(co i
) = g(
( o i
)-k o
+jf^(k o
-g (0)) (3-4)
Expression 3-4 is obtained from 3-1 eliminating the constant a nPoles
with the
DC constraint (see Appendix III for details) nPoles h-
n
•«(0) = * b + I ^ (3-5)
£1 Pk
From a practical point of view, and for simple configurations, the fitting using only the real part of the functions works very well. It must be noted that the idempotent elements in these cases show a strong real component. For more
20 complicated configurations, the fitting may not be as good as for the simpler cases, which suggests that more sophisticated fitting techniques need to be implemented. A possibility, for instance, would be to use the module of the functions instead of the real part. In this latter case, however, the minimum square problem would become non-linear and methods like the Levenberg-Marquardt algorithm [8] would have to be used.
One more refinement to the idempotent fitting procedure is that once all the idempotent elements are fitted, the synthesis function for the mode with maximum error is discarded. This synthesis function is instead re-calculated using the property that the addition of all idempotents has to be equal to the unity matrix
[9].
It is interesting to mention that in the fitting procedures the phase angle is not taken into account. The functions are assumed to be minimum phase and fitted with minimum phase, rational approximations. Even though by looking at the idempotent functions this assumption may not appear to be strictly correct in some frequency regions, it was found that a minimum phase fit of the idempotent functions still gives a very good fit, in both, magnitude and phase angle, of the final phase-domain propagation matrix [Ap hase
].
3.2.
Fitting of the Modal Propagation Functions
For the model implemented, the fitting of the modal propagation functions is obtained using the program F D D A T A of Microtran [10]. This program gives the p's, k's, and x's of each modal propagation function (see equation 2-13).
21
3.3.
Expression for the Phase-Domain Propagation Matrix
The expression of the phase-domain propagation matrix is calculated from the partial fraction synthesis of the modal propagation functions and the partial fraction synthesis of the idempotent matrices.
Since all the functions in the phase-domain propagation matrix tend to zero as frequency increases, their partial fraction expansion does not include a constant term. The
[AT|'s and p's in equation 2-14 for the phase-domain propagation matrix are obtained by multiplying the partial fraction expansions of the idempotents times the partial fraction expansions of the mode propagation functions (equations 2-12 and 2-13 respectively).
The product of two functions A(s) and B(s) each given as a partial fraction expansion can also be expressed as a partial fraction expansion.
Let
A(s) = A
1 0+Z
Z—
L
-
(3-6) and
" B
(3-7) their product can be expressed as
" 1 » 4 5 , ] » 1 [ " A i
B j
A(
S
)B(s) = A
0
B
Q
+ Y .-7-
ABj
-zZ^^
+1.— *o4 +E—
L j L
"
The only restriction to the form of the product in 3-8 is that the y's and the x's have to be different from each other in order to avoid terms with poles of multiplicity 2. It
22 is important to note that the number of poles of the resultant expansion is the sum of the number of poles of the two original expansions.
Equation 3-8 can be easily generalised to the case where one of the functions is a matrix, i.e., either A t
or Bj are square matrices.
3 .4.
Fitting Results
In this section, some of the fitting results of the phase-domain propagation matrix are shown for various line configurations.
3 .4.
. Single-Circuit Transmission Line
The simplest case analysed is that of a three-phase horizontal line (flat line). For the example shown here, the configuration of the conductors is shown in
Figure 3-2. The length of the line is 100 km. The details of the conductors are summarised in Table 3-1.
5 m
O
1
O
2 o
3
15 m
Ground Plane
/ / / / / / / / / /
Figure 3-2.
Configuration of single-circuit (flat) transmission line.
23
Parameter Value
Ratio Thickness/Diameter 0.2854
DC Resistance (Q/km) 0.10500
Diameter (mm) 24.2062
Table
3
-1. Conductor parameters for single-circuit (flat) transmission line.
Due to the simple configuration of this line, a small number of poles is sufficient to accurately fit the phase-domain propagation matrix. Table 3-2 summarises the number of poles used for this fitting for each line mode (see equation 2-14). This total includes the number of poles to fit the modal propagation function plus the number of poles to fit the elements of the associated idempotent matrix. Figures 3-3 and 3-4 show the fitting of the magnitude for the diagonal and off-diagonal elements of the phase-domain propagation matrix. The fitting of the phase of these elements can be seen in Figures 3-5 and 3-6. (Note that at the scale of Figures 3-5 and 3-6, it is not possible to distinguish between solid and dashed lines in most of the frequency range, and the curves could not be labelled as in Figures 3-3 and 3-4.)
Mode 1 2 3 Y c
Npoles 14 17 18 12
Table
3-2.
Fitting poles for single-circuit (flat) transmission line.
24
Figure
3-3.
Magnitude of the diagonal elements of the phase-domain propagation matrix for a single-circuit transmission line.
Figure
3 -4.
Magnitude of the off-diagonal elements of the phase-domain propagation matrix for a single-circuit transmission line.
25
0
-2000
-4000
Phase (deg)
-6000
-8000
-10000
-12000
-3
10 10 10
Frequency (Hz)
10
Figure 3-5. Phase of the diagonal elements of the phase-domain propagation matrix for a single-circuit transmission line.
2000
-2000
-4000
Phase (deg)
-6000
-8000
-10000
-12000
-3
10 10 10
Frequency (Hz)
10
Figure 3-6. Phase of the off-diagonal elements of phase-domain propagation matrix for a single-circuit transmission line.
26
As it can be seen from the previous plots, the fitting is very accurate up to
10
5
Hz, which (by the Nyquist frequency criteria) means that the model is accurate for time steps as small as 5 us. The slight degradation of the fitting for frequencies beyond 10
5
Hz is due in part to the fact that, as explained in chapter 2, the fitting with common poles is done using only the real part of the function.
It is important to point out here that there are some errors in the angle fittings for the off-diagonal elements, mainly at lower frequencies (Figure 3-6).
However, as shown in Figure 3-4, the magnitude of the off-diagonal elements at these frequencies is very small compared with the magnitude of the diagonal elements, thus making the contribution of these terms at these frequencies negligible and the phase errors unimportant.
3 .4
.2.
Double-Circuit Transmission Line.
This example corresponds to two coupled transmission lines. The conductors in the first line are placed horizontally with respect to the ground plane while the conductors in the second line are placed vertically with respect to the ground plane. Figure 3-7 shows the configuration and distances between conductor for this line. The length of the line is 100 km. The parameters of the conductor for this case are shown in Table 3-3.
The number of poles required to obtain an appropriate fit of the phase-domain propagation function for this line are summarised in Table 3-4. As can be seen, despite the unbalanced physical structure of this system, the number of poles required to have an adequate fit is not excessive.
27
2 m 2m
O O O
2 3
5 m
O 1
5 m
O 1
12 m
10m
10m
Ground Plane
/ / / / / / / / / / / / / / / / / / / V
Figure 3-7. Configuration of double-circuit transmission line.
Parameter Value
Ratio Thickness/Diameter 0.2854
DC Resistance (Q/km) 0.10500
Diameter (mm) 24.2062
Table 3-3. Conductor parameters for double-circuit transmission line.
Mode 1 2 3 4 5 6 Y c
NPoles 17 17 17 16 21 21 10
Table 3 -4.
Fitting poles for double-circuit transmission line.
The magnitude fits for the phase-domain propagation matrix for the diagonal elements are shown in Figure 3-8. Figure 3-9 shows the magnitude fits for the off-diagonal elements of column 1 of the phase-domain propagation matrix. Similarly to the horizontal line studied earlier, the fitting is adequate for frequencies up to 10
5
Hz, that is, for a minimum time step of 5 |xs. Figures 3-10 and 3-11 show the phase fits for the diagonal and off-diagonal elements, respectively. Similarly to the single-phase line, the angle fits of the off-diagonal elements present some errors in the lower frequency regions, that are compensated by the fact that the magnitude of these terms at these frequencies is small compared with the magnitude of the diagonal elements.
28
0
-3 0 3 6
10 10 10 10
Frequency (Hz)
(a) elements (1,1), (2,2), and (3,3)
-3 0 3 6
10 10 10 10
Frequency (Hz)
(b) elements (4,4), (5,5), and (6,6)
Figure 3-8. Magnitude of the diagonal elements of phase-domain propagation matrix for a double-circuit transmission line.
2 9
0.3
Magnitude
0.2
0.1
-3
10 10 10
Frequency (Hz)
10
Figure 3-9. Magnitude of the off-diagonal elements, column 1, of phase-domain propagation matrix for a double-circuit transmission line.
0
-2000
-4000
Phase (deg)
-6000
-8000
L
-10000 h
-12000
-3
10 10 10
Frequency (Hz)
10
Figure 3-10. Phase of the diagonal elements of phase-domain propagation matrix for a double-circuit transmission line.
30
2000
-12000
-3 0 3 6
10 10 10 10
Frequency (Hz)
Figure 3-11. Phase of the off-diagonal elements, column 1, of phase-domain propagation matrix for a double-circuit transmission line.
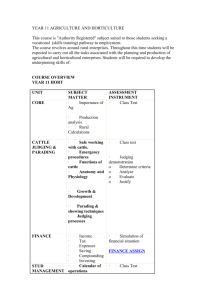
3.4.3. Triple-Circuit Transmission Line
In this section a triple-circuit (nine phases) multi-voltage line is analysed.
The physical structure of the line is shown in Figure 3-12. It consists of one 500 kV circuit and two 230 kV circuits in the same tower, in addition to common ground wires. The total length of the line is 100 km. The physical conductor data is given in Table 3-5.
Table 3-6 summarises the number of poles required for the fitting of the elements of the phase-domain propagation matrix for this line configuration. As can be seen, more poles are required to appropriately fit these functions than in the previous examples of single- and double-circuit line configurations.
3.75 m 12.32 m
•!« • —H
0.5 m
M
— i
o o gw
0 gw
o v 1 o o,
9.21 m
12.90 m
12.90 m
12.90 m
12.90 m o
500 kV
21.13 m
18.42 m
5.49 m 11.58 m
/ / / / / / / / / / / / / / / / / / / V
Ground Plane
Figure 3-12. Triple-circuit transmission line configuration.
Line Parameter
Conductor type
Value
585.0 A C S R
Ratio Thickness/Diameter 0.3157
DC Resistance (Q/km) 0.09743
Diameter (mm)
N conductors in bundle
24.13
4
230 kV lines Conductor type 1843.2 A C S R
Ratio Thickness/Diameter 0.4000
Ground Wires
DC Resistance (Q
Diameter (mm)
Conductor type
Diameter (mm)
/km) 0.03101
40.64
7N07 A W L D D
Ratio Thickness/Diameter 0.5000
DC Resistance (Q/km) 1.160
11.00
Table 3-5. Parameters for triple-circuit transmission line.
Mode 1 2 3 4 5 .. 6 7 8 9 Y c
NPoles 45 43 45 45 42 44 44 44 44 15
Table 3-6. Fitting poles for triple-circuit transmission line.
32
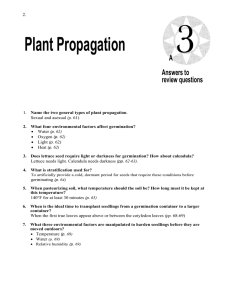
Figures 3-13 to 3-16 show the magnitude fit results for the elements of phase-domain propagation functions. As can be seen, the magnitude fit degrades for higher frequencies. Nonetheless, it remains accurate up to about 5.10
4
Hz
(corresponding to a minimum time step of 10 us). Due to the number of fitted functions (81), only six of the diagonal elements and the eight off-diagonal elements of column 2 are shown. Figures 3-17 and 3-18 show the phase fits for some of the diagonal and off-diagonal elements. As in all cases studied in this thesis, some of the phase fits of off-diagonal elements present errors in the lower frequency region that are compensated by the relatively small magnitude of these elements in this region.
1
0.8 L
0.6 h
Magnitude
0.4 L
0.2 h
Actual
Fitted
0
10
-3
10
0
10
3
Frequency (Hz)
10
6
Figure 3-13. Magnitude of elements (1,1) (2,2) (3,3) of phase-domain propagation matrix for a triple-circuit transmission line.
33
(8,8)-
(9,9)-
-(7J)
0.8
0.6
Magnitude
0.4
0.2
10 10 10
Frequency (Hz)
10
Figure 3-14. Magnitude of elements (7,7) (8,8) (9,9) of phase-domain propagation matrix for a triple-circuit transmission line.
0.4
0.3
Magnitude
0.2
0.1
10 10 10
Frequency (Hz)
10
Figure 3-15. Magnitude of elements (1,2) (3,2) (4,2) (5,2) of phase-domain propagation matrix for a triple-circuit transmission line.
34
0.2
Magnitude
0.1
10 10 10
Frequency (Hz)
10
Figure 3-16. Magnitude of elements (6,2) (7,2) (8,2) (9,2) of phase-domain propagation matrix for a triple-circuit transmission line.
0
-2000
-4000
Phase (deg)
-6000
-8000
I
-10000
-12000
-3
10 10 10
Frequency (Hz)
10
Figure 3-17. Phase of elements (1,1) (2,2) (3,3) of phase-domain propagation matrix for a triple-circuit transmission line.
35
Figure 3-18. Phase of elements (1,2) (3,2) (4,2) (5,2) of phase-domain propagation matrix for a triple-circuit transmission line.
36
4. TIME DOMAIN SIMULATIONS
In this chapter, in order to validate the accuracy and reliability of the new model, time domain results obtained with the new model are compared with simulation results obtained with other reference models.
4.1. Steady State Simulation
A comparison was done between the results given by the new model for a steady state simulation and the results obtained with the exact 7C -equivalent model ([5, 10]).
The steady state condition with the new model was found by running the program for a long simulation time and checking at the output for all transients to die out.
The circuit configuration used for the steady state simulation is shown in Figure
4-1.
511.7 kV 7-78.5°
Phases 1, 2 and 3
Triple-circuit Transmission Line.
Length 100 km
Phases 4, 5 and 6
I circ.
Phases 7, 8 and 9
I circ.
Figure 4-1. Steady state test configuration.
485.3 kV/-120.0°
37
The objective of this test is to observe the steady state current flowing through the line grounding switches due to the induced voltages in phases 4 to 9.
Table 4-1 shows the results obtained with the new model (idLine) compared with the exact solution and the fdLine model. The transformation matrix for the fdLine model was calculated at 60 Hz.
Phase
1
2
3
4
5
6
7
8
9
Exact Solution
Current
8771.23
/-92.12°
9626.84
/142.48°
8659.80
/15.55°
753.06
/66.22°
353.10
/-6.84°
654.20
/-128.16
0
384.75
/61.51°
103.75
/0.99°
370.51
7-133.14° fdLine @ 60 Hz idLine
Current Mod. error Current Mod. error
8651.48
/-93.51°
-1.37% 8879.42
/-92.92°
1.23%
9682.08
/142.99°
0.57% 9721.77
/141.67°
0.99%
1.51% 0.67% 8790.15
/16.53°
855.34
/59.64°
13.58%
8717.67
/14.39°
796.31
/62.97
0
5.74%
2.98% 506.94
/-10.66°
582.26
/-127.54°
413.97
/l 06.69°
37.94
/-8.30°
325.83
7-149.59°
43.57% • 363.63
/-11.05°
-11.00% 667.14
/-131.71
0
7.59% 397.93
/55.11°
-63.44%
-12.06%
115.29
/-4.51
0
387.38
7-139.71°
1.98%
3.43%
11.12%
4.55%
Table 4-1. Steady state currents in triple-circuit transmission line.
As it can be seen in Table 4-1, the maximum errors for both the idLine and the fdLine models occur for phase 8, where idLine shows a 11.12% error in magnitude, while the error with fdLine is about six times that amount (63.44%).
4.2. Open Circuit Test.
For an open circuit simulation, the six-phase horizontal/vertical line was used. The test was performed energising phases 1,2, and 3 with three balanced sinusoidal sources,
38 while phases 4, 5, and 6 were grounded through 10 Q resistances. The receiving end of the energised phases was left open. The diagram for this test case is shown in Figure 4-2.
Phases 1, 2 and 3
Double-circuit Transmission Line.
Length 100 km
Phases 4, 5 and 6
10
Q
10 Q
Figure
4-2.
Open circuit test configuration.
The time step used in the simulation was 5 u,s and the total simulation time was
5.12 ms. The variables observed in this case are the voltages at the receiving end of phases 4, 5 and 6.
Figures 4-3 to 4-5 show the voltages for phases 4 to 6, respectively. As it can be seen, the responses obtained with the idLine and fdLine models are very close to the one obtained with the FDTP frequency domain program of [14].
xlO"
3
V
2
1
0
-1
-2
0 2 3
Time (ms)
Figure 4-3. Open circuit test. Voltage on phase 4 receiving end.
0.5
xlO'
3
V
0
-0.5
-1
-1.5
0 2 3
Time (ms)
Figure 4-4. Open circuit test. Voltage on phase 5 receiving end.
39
40 x l 0 ° V
2 3
Time (ms)
Figure 4-5. Open circuit test. Voltage on phase 6 receiving end.
4.3. Short Circuit Test.
The short circuit energization test is very similar to the open circuit one presented earlier, with the exception that the receiving ends of the three energised phases are solidly connected to ground. The test configuration is shown in Figure 4-6.
Figures .4-7 to 4-9 show the voltages in phases 4 to 6 at the receiving end. In contrast with the open circuit energization case, the fdLine results for phases 5 and 6 differ from those obtained with the FDTP program and the idLine model. The idLine results agree well with those of the FDTP.
41
Phases 1, 2 and 3
Double-circuit Transmission Line.
Length 100 km
Phases 4, 5 and 6
10 Q
10
8
6 x i o
3
v 4
Figure 4-6. Short circuit test configuration.
10 Q
0
0 2 3
Time (ms)
Figure 4 -7.
Short circuit test. Voltage on phase 4 receiving end.
6
xlO"
3
v
Figure
4-8.
Short circuit test. Voltage on phase
5
receiving end.
xlO"
3
V
0 1 2 3
Time (ms)
Figure
4-9.
Short circuit test. Voltage on phase
6
receiving end.
42
43
4.4. Trapped Charge Test.
The trapped charge test consists in opening interruptors at both ends of a transmission line, which was initially in sinusoidal steady state. After opening the interruptors, and after the transient has been damped out, the conductors should remain charged at the voltage prior to opening the interruptors.
The diagram for this test case is shown in Figure 4-10. The line configuration for this test was the single-circuit three-phase transmission line described in chapter 3. t = 0.10s Phases 1,2 and 3
Single-circuit Transmission Line.
Length 100 km t = 0.10 s
100 Q
34.5kV
I
Figure 4-10. Trapped charge test configuration.
Since it is was possible to simulate this type of phenomena with the FDTP program, only the comparison between the idLine and fdLine models is made.
As it can be seen in Figures 4-11 to 4-13 the voltage in the open phases Oscillates, and after some time settles down to a value that is in close agreement for both models.
The oscillations are very similar for the two models in amplitude and frequency for the first few milliseconds of simulation. A very small difference in the frequency begins to develop as the transient is being damped (Figure 4-14).
It should be mentioned that numerical stability under trapped charge conditions is a very demanding test on frequency dependant line models. The results of this test show that both fdLine and the new idLine model are numerically stable under this condition.
44 kV
80
60
40
20
0
-20
-40
-60
-80
-100
-120
0 0.02 0.04 0.06 0.08 0.1
Time (s)
Figure 4-11. Trapped charge test. Voltage at the receiving end, phase 1.
40
30
20
kV
10
0
-10
-20
-30
0 0.02
. Time (s)
Figure 4-12. Trapped charge test. Voltage at the receiving end, phase 2.
0.1
45
100
50
kV
0
50
kV
0
-50
0 0.02 0.04 0.06 0.08 0.1
Time (s)
Figure 4-13. Trapped charge test. Voltage at the receiving end, phase 3.
100
-50
0 0.02 0.1
Time (s)
Figure 4-14. Trapped charge test. Detail of voltage at the receiving end, phase 3.
46
5.
C O N C L U S I O N S
A new model for the representation of transmission lines in transient simulations has been presented. This model accurately represents the transmission line directly in phase coordinates including the frequency dependent nature of the line parameters over a wide frequency band. As opposed to modal-domain models, there is no need for transformation matrices relating modal and phase coordinates.
The phase-domain propagation matrix is represented in the phase domain in term of the natural propagation modes and idempotent coefficient matrices. The idempotent matrices are obtained from the line eigenvectors but are uniquely defined and independent of the eigenvectors scaling.
The only consideration in computing the idempotent matrices is to prevent switching of eigenvector columns in the line transformation matrices. Seeded algorithms are effective means to prevent this problem.
Even though only a very crude procedure has been implemented to fit the idempotent functions, the resulting fittings of the phase-domain propagation matrix are very good over a wide frequency range.
An interesting observation is that it is more important to accurately fit the mode propagation functions than the idempotent functions. This is corroborated by the fact that the fdLine model, despite assuming a constant real transformation matrix (which corresponds to assuming constant idempotents) is still a very good overall model.
47
The numerical stability of the model is based on using the same set of poles for fitting all elements of a full matrix. This is applied to the fitting of the idempotent matrices and the characteristic admittance matrix.
Experimentally, the model remained stable for all simulation tests. In particular, simulations of up to 200000 time steps were performed (steady state test), with ho numerical drifts observed.
The results obtained in steady state simulation test with the new model are better than those obtained with the fdLine model for strongly asymmetric lines. This result is not surprising in view of the fact that the transformation matrix used by the fdLine model has the limitation of being real (the imaginary part is neglected). For the steady state simulation presented, the worst errors for the new model with respect to the exact solution were six times smaller than those for the fdLine model (63.44% for idLine against
11.12% for fdLine).
The new model gave results very close to those obtained with the "exact" FDTP frequency domain solution, under both open- and closed-circuit simulations. The fdLine model also gave very good results in the case of open circuit energization. However, for short circuit energization, the fdLine model diverged from the results obtained with the
FDTP and idLine models.
The results of the trapped charge test show a good behaviour of the model for frequencies close to D C , with no noticeable degradation of the output. It also compares very well in this case with the fdLine model. '
Programming of the model was done using object-oriented software design techniques with the Ada 95 programming language. Through all the stages of
48 development it was found that this approach resulted in code that was easy to maintain and to upgrade when fine tunings of the algorithms were necessary. The compiler used was the G N A T Ada 95 compiler version 3.04a for Windows 95 (public domain), although every measure was taken to make it fully portable to any Ada 95 compiler.
Preliminary results of computer times for the simulations presented here show that the new idLine model is in the order of N times slower than the fdLine model, where N is the number of phases of the line being simulated. This is due in part to the fact that all operations that are scalar in the fdLine model are now in matrix form in the idLine model.
Even tough in this thesis only applications to overhead transmission lines are shown, it is believed that the model developed here is also applicable to the case of underground cables.
Some aspects remain open for future study and improvement. One aspect of importance is the development of a good algorithm capable of fitting a matrix of frequency functions with a common set of poles. Although conceptually the model developed imposes no limitation on the way the functions are fitted, the use of common poles assures numerical stability and results in very compact and efficient expressions for the phase-domain propagation function and characteristic impedance matrix.
It would also be interesting to investigate further the possibility of fitting a combined idempotent times natural mode propagation function (without the time delay).
This could help to reduce the total number of poles required and still obtain an accurate fitting for the overall model.
49
B I B L I O G R A P H Y
[I] J. R. Marti, "Accurate Modelling of Frequency-Dependent Transmission Lines in
Electromagnetic Transients Calculations. IEEE Transactions on Power Apparatus and Systems, vol. P A S - l O l ( l ) , pp. 147-157, January 1982.
[2] L. Marti, "Simulation of Transients in Underground Cables with
Frequency-Dependent Modal Transformation Matrices", IEEE Transactions on
Power Delivery, vol. 3(3), pp. 1099-1110, July 1988.
[3] L. M . Wedepohl, "Application of Matrix Methods to The Solution of
Travelling-Wave Phenomena in Polyphase Systems", Proc. IEE, vol. 110(12), pp.
2200-2212,1963.
[4] H. W. Dommel, "Digital Computer Solution of Electromagnetic Transients in
Single- and Multi-Phase Networks". IEEE Transactions on Power Apparatus and
Systems, vol. PAS-88(4), pp. 388-399, April 1969.
[5] H. W. Dommel, EMTP Theory Book, Microtran Power System Analysis
Corporation, Vancouver B. C , Canada, 1992.
[6] D. E. Hedman, "Propagation on Overhead Transmission Lines. I-Theory of Modal
Analysis", IEEE Transactions on Power Apparatus and Systems, pp. 200-205,
March 1965.
[7] L. M. Wedepohl, H. V. Nguyen and G. D. Irwin, "Frequency-Dependent
Transformation Matrices for Untransposed Transmission Lines using
Newton-Raphson Method", Paper 95SM602-3 PWRS, IEEE PES Summer
Meeting, Portland, USA, 1995.
[8] W. H. Press, Numerical Recipes: the Art of Scientific Computing, Cambridge
University Press, Cambridge, USA, 1986.
[9] L. M . Wedepohl, Frequency Domain Analysis of Wave Propagation in
Multiconductor Transmission Systems (Lecture notes), The University of British
Columbia, Dept. of Electrical Engineering, Vancouver B. C , Canada, 1993.
[10] Microtran Corp., Microtran Reference Manual, Microtran Power System Analysis
Corporation, Vancouver B. C., Canada, 1992.
[II] A. Semlyen and A. Dabuleanu, "Fast and Accurate Switching Transients
Calculations on Transmission Lines with Ground Return using Recursive
Convolutions", IEEE Transactions on Power Apparatus and Systems, vol.
PAS-94, pp. 561-571, March/April 1975.
50
F. Castellanos and J. R. Marti. "Phase-domain Multiphase Transmission Line
Models", Proceedings of the International Conference on Power Systems
Transients, pp. 17-22, Lisbon, Portugal, September 1995.
H. Bahrer, Synthesis of Electrical Networks, A Wiley-Intersciehce Publication,
Dublin, Ireland, 1984.
J. R. Marti, B. W. Garret, H. W. Dommel and L. M . Wedepohl, "Transients
Simulation in Power Systems: Frequency Domain and Time Domain Analysis",
Canadian Electrical Association. C E A Transactions. Montreal, Quebec. March
1985.
C. G. Cullen, Matrices and Linear Transformations, 2 n d
Edition, Dover
Publications Inc., New York, 1990.
APPENDIX I. Frequency-Domain Transmission Line Equations
Line Equations:
WKiXf]
(a) dx
D[L] dx
(b)
Propagation Equations:
(1-1) d
2
[v]
^2 =[ZlY][V] (a)
(1 -2) d V ] dx'
. (b)
The general solution of these equations at a point x (0 < x < I) down the line is
[V x
] = e-^[V a
]
+
e
+
M> V„] (a)
[I x
] = e-^[l a
]
+
e ^ h] (b)
(1-3) where the following matrices have been defined:
[y v
]=Mri
(1-4)
51
Differentiating I-3(b) with respect to x, and substituting into I-1(b)
[r ,K
1
"
1
1
^]-[v ,K
[
" l t.]=mW
[r ,]=[n ]-' e
-W "[/„]-[y„]-
|e
+'i'[/ t
] d -5) where matrix [Y c
] is defined as
W=[Y,rm d-6)
Using equations I-3(b) and 1-5 to calculate [F c
^V
X
] + [l x
],
52
W^] + [A] = ^ lT
')*[/ fl
] d -7)
At the sending end k (x = 0),
Substituting 1-8 in 1-7,
M ^
+
[/,] =
e
+.lt*]
+
[/,]) (1-9)
At the receiving end m(x = 1) and reversing the direction of the current I m
,
[ y cK ]-[/.i=^([^][^]+[/
4
D
=
[^M -I^] . a-
10
)
Following a similar procedure for the sending end k in term of the receiving end m
Equations I10 and 1-11 are equations in 2-3 in the text.
53
APPENDIX II. Trapezoidal Integration of Matricial Partial Fractions
The matricial partial fractions used in the model are defined as follows:
[G(s)] = [K]^ (II-l)
.
L J
s+p
Where matrix [ATJ and p are real and constant, and s = yco. Assuming an input
[X(s)] and an output [Y(s)] to a block with a transfer function [G(s)], the following equation can be written in the frequency domain:
[Y(s)] = [G(s)][X(s)] = [K] - J [X(s)]
(s + p)[Y(s)] = [K][X(s)] s[Y(s)] = -p[Y(s)] + [K][X(s)] (11-2)
To transform equation II -2from the frequency domain into the time domain, the
Inverse Laplace Transform is used: j t
[y(t)] = -
P
[y(t )]+[Klx (t)] (n-3)
Integrating both sides of equation II-3 from t - At to t using the trapezoidal rule, we obtain: j
T
[y(u))lu= \(-p[y(u)] + [K][x (u)])du u=t-& a U
u=t-Al
[y(0] - [y(t - At)] = \(-p[y(t)] + [K][x (t)] - p[y(t - At)] + [K][x (t - At)])At
54
=
f T l f ? ^ ^ -
A
° l
+
2 ^ A 7
[ A r ]
( [
X (
° ]
+
"
A
°D
( I I _ 4 )
Equation II -4 can be written in a recursive way as
[*o ]=[4 *(o]+[*(')] (n-5) where [h(t)] is the history term defined as
[h(t)] = (b + l)[A][x(t-At] + b[h(t-At)] (11-6) and constants [A] and b are defined as
[A] = ^—[K]
pAt
(II -7)
2 -pAt
2
+ pAt
55
APPENDIX III. Fitting of a Rational Function with Given Poles
To fit the elements in the idempotent matrices, a function of the following form is first assumed: k,a,
(=1
A
^PI
(III-l) where the k^s are the initial values of the constants and the a's are constants to optimise.
The restriction at D C is g (0) = k
0
+
" p
^ s k i a i
/=!
Pi
Solving equation III -2 for a n
,
(III -2)
"^kfl, ka
/-l
Pi Pn p/
1 =1 Pi J
Substituting in III-l, nPoles1
,=i
S +
Pi s + p n
"
Po,es
x
ka ^ g ( 0 ) - *
0
I g(s)=k
0+
-^( g
(0 )-k o nPoles
x(
k, k, p„
)+ y a.
S + P n
M ^
S
+ Pi Pi
S
+ P „J
The auxiliary function g \s) is defined as g'(s) = g(s)-k
0
Pn
{g (0 )-K)
S + Pn
(III -3)
(III -4)
56 g'(s)= £ k, k, p„
M \?.+P, Pi s + p „J
\a,
Taking the real part of g'(s) (s-j(o), the following equation is obtained:
(III-5)
111 L / f O PiK
k i PI
— W+pf p t
(a
2
+p
2 a. which can be written as nPoles-\
Re{g'(»)}= I>,(co)a,.
;=1 where the basis functions are
(III-6)
AjKSO) —
2 2
~ 2 , 2
CO +/?,. CO + / ? „
(III-7)
Now the optimising procedure described in [8] can be applied to find the fitting function.