Placing the trailing foot closer to an obstacle reduces flexion of the
advertisement

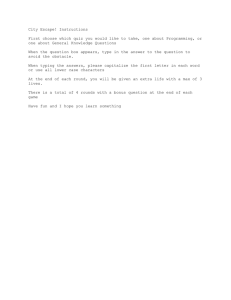
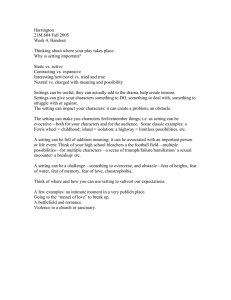
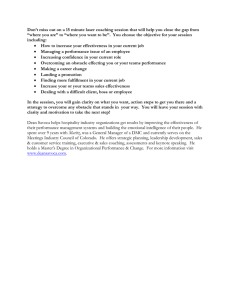
Journal of Biomechanics 31 (1998) 685 — 691 Placing the trailing foot closer to an obstacle reduces flexion of the hip, knee, and ankle to increase the risk of tripping Li-Shan Chou1, Louis F. Draganich* Motion Analysis Laboratory, Section of Orthopaedic Surgery and Rehabilitation Medicine, Department of Surgery, The University of Chicago, MC 3079, 581 South Maryland Avenue, Chicago, IL 60637, U.S.A. Received in final form 27 May 1998 Abstract This study was performed to test the hypothesis that reducing the horizontal distance between the trailing foot (foot crossing the obstacle last) and obstacle, during stance just prior to stepping over the obstacle, would reduce flexion of the hip, knee, and ankle joints of the trailing limb when the toe is over the obstacle to reduce the vertical toe-obstacle clearance and increase the risk of tripping. Fourteen healthy young adults stepped over an obstacle of 51, 102, 153, and 204 mm height in a self-selected manner (i.e., toe-obstacle distance was not controlled) and for toe-obstacle distance targets of 10, 20, 30, and 40% of their step lengths measured during unobstructed gait. The reductions in toe-obstacle distance resulted in linear decreases in flexion of the hip, knee, and ankle when the toe was over the obstacle. Toe-obstacle clearance of the trailing limb decreased significantly as toe-obstacle distance decreased. The reductions in toe-obstacle distance led to contact of the trailing (but not the leading) foot with the obstacle, the closer the obstacle the greater the number of contacts. The reductions also resulted in linear decreases in swing time of the trailing limb from toe-off to when the toe was over the obstacle. The height of the hip was not affected by toe-obstacle distance. Angular velocity of knee flexion was found to increase linearly as toe-obstacle distance decreased and appears to be of primary importance in avoiding obstacle contact. ( 1998 Elsevier Science Ltd. All rights reserved. Keywords: Gait; Obstacle; Toe-obstacle distance; Toe-obstacle clearance; Tripping 1. Introduction Falls are a serious problem among the elderly, frequently resulting in physical injury and significant costs for health care (Gryfe et al., 1977; Prudham and Evans, 1981; Tinetti et al., 1988) and tripping over obstacles is the most frequently mentioned cause of falls in the elderly (Blake et al., 1988; Campbell et al., 1990; Overstall et al., 1977; Prudham and Evans, 1981; Tinetti and Speechley, 1989). To understand tripping and develop methods for avoiding tripping, it is important to identify and quantify those variables that are responsible for elevating the foot to clear the obstacle. Obstacle location affects maximum flexion of the hip and ankle (McFadyen et al., 1993), * Corresponding author. Fax: (773) 702-0076; e-mail: ldragani@ surgery.bsd.uchicago.edu 1 Current address: Orthopedic Biomechanics Laboratory, Mayo Clinic / Mayo Foundation, Rochester, MN 55905, USA. 0021-9290/98/$19.00 ( 1998 Elsevier Science Ltd. All rights reserved. PII S0021-9290(98)00081-5 mechanical power at the hip and knee (McFadyen et al., 1993), and muscle activity (Patla et al., 1991) of the limb crossing the obstacle. Toe-obstacle clearance is relatively constant for either limb, ranging from 100 to 150 mm, when stepping over obstacles between 25 and 268 mm high in a self-selected manner (Chen et al., 1991; Chou and Draganich, 1997; Patla and Rietdyk, 1993), and flexion of the knee is of primary importance in elevating the foot to clear the obstacle (Chou and Draganich, 1997; McFadyen and Winter, 1991). Also, reducing the available reaction time increases the risk of tripping when stepping over a virtual obstacle (light flashed on floor; Chen et al., 1994) or over obstacles 20 or 80 mm high (Patla et al., 1991) in a self-selected manner. We have been unable to find literature documenting that tripping of the leading or trailing foot results in falls. However, the trailing foot is closer to the obstacle than the leading foot during stance just prior to stepping over the obstacle. Furthermore, visual contact with the obstacle is normally absent when stepping over the obstacle 686 L-S. Chou, L.F. Draganich / Journal of Biomechanics 31 (1998) 685—691 with the trailing foot. Thus, tripping over obstacles with the trailing foot might be expected to occur more frequently than with the leading foot. Recovery from tripping with the trailing foot is expected to be easier than with the leading foot. Nevertheless, tripping with the trailing foot may lead to falling in the elderly because of their slower reaction time (Morgan et al., 1994) and decreased muscle strength (Whipple et al., 1987). When stepping over obstacles of various heights in a self-selected manner both young and older subjects consistently place their trailing feet at the same distance from the obstacle just before stepping over it (Chen et al., 1991; Chou and Draganich, 1996). This suggests that placement of the trailing foot during stance just prior to stepping over the obstacle is precisely controlled by the central nervous system to allow enough time to flex the joints of the trailing limb, elevate the foot, and clear the obstacle. Reducing the horizontal toe-obstacle distance below that of the self-selected distance would reduce the time available for reaching the obstacle and alter the geometrical configuration of the lower extremities. We hypothesized that such a reduction would reduce flexion of the hip, knee, and ankle joints of the trailing limb when the toe is over the obstacle to reduce the vertical toe-obstacle clearance and increase the risk of tripping. 2. Methods Gait analysis was performed on fourteen healthy young adults (7 males, 7 females) having a mean age of 23 yr (range, 19—32 yr). Their average height was 171 cm (range, 158—184 cm), and their average weight was 694 N (range, 516 N to 953 N). All but one of the subjects were right-hand dominant. The protocol for this study was approved by the Institutional Review Board of The University of Chicago. The experimental procedures for the study were explained to the subjects and informed consents were obtained prior to the experiments. Clusters of six or eight infrared light-emitting diodes were attached to the foot, shank, and thigh of the left lower limb (trailing limb) and pelvis of the subject with elastic straps. Kinematic parameters were collected with the WATSMART (Northern Digital, Inc., Waterloo, Ontario, Canada) optoelectronic, 3-D digitizing system. Kinematic parameters were sampled at a rate of 100 Hz. The overall accuracy of the system was better than 5 mm for a volume 2 m long, 1.5 m high, and 0.7 m wide. Two force-sensing resistors (Interlink Electronics, Carpinteria, California) were attached to the sole of the left shoe with self-adhesive to register the times of heel-contact and toe-off. The use of this instrumentation in our laboratory has been reported (Chou et al., 1995, 1997; Chou and Draganich, 1997; Draganich et al., 1995). Three sets of experiments were performed. In Experiment 1, the subjects were asked to walk on the walkway, without encountering obstacles, in their self-selected manner. Each subject’s average step length over three to six steps was measured. Before performing Experiments 2 and 3 we discovered the subject’s final starting position and base-line location for the obstacle by adjusting both the subject’s starting position and obstacle location until the toe of the subject’s trailing foot landed consistently within 5 cm of a target on the force plate. The subject was unaware of the target and was asked to walk and step over the obstacle comfortably. Thus, we discovered a final starting position and base-line location for the obstacle that allowed the subject to step within the target area and then over the obstacle with the trailing foot, all in a self-selected manner. The obstacle consisted of a white elastic band 6 mm wide and 1 mm thick stretched across an aluminum frame at heights of 51, 102, 153, or 204 mm. The aluminum frame was 91.5 cm wide and placed across the walkway, requiring the subjects to step over the obstacle with both limbs. In Experiment 2, the subject was asked to begin walking comfortably from the final starting position, step over the obstacle placed at the base-line location, and continue walking. This was repeated for each of the four obstacle heights in a random order. In Experiment 3, the obstacle of each height was randomly selected and randomly placed at a distance of 10, 20, 30 or 40% of the subject’s step length measured during unobstructed walking from the target. The subject was instructed to begin walking from the final starting position, maintain the same step lengths used in Experiment 2 until stance of the trailing foot just prior to stepping over the obstacle, and then step over the obstacle and continue walking. Subjects were asked to wear their own low-heel shoes and performed several practice trials to become accustomed to the instrumentation and environment. The kinematic data were analyzed for the trailing limb from heel-contact just before crossing the obstacle to the next heel-contact just after crossing the obstacle. The average angular velocities of the hip, knee, and ankle of the trailing limb from toe-off to when the toe was over the obstacle were computed by dividing the angular range traversed by the time required. Detailed descriptions of the methodologies used in our laboratory for measuring the temporal-distance variables, three-dimensional motion of the joints of the lower limb, and the coordinates of the end of the great toe were reported previously (Chou and Draganich, 1997). Only trials were accepted for which the toe of the subject’s trailing foot landed within 5 cm of the target, defined as a successful foot placement. The trial was repeated if foot placement was not successful until three successful trials were collected for each task (i.e., for each height and for each height at each distance). A total of 63 trials were collected, including those for tripping and for L-S. Chou, L.F. Draganich / Journal of Biomechanics 31 (1998) 685—691 unobstructed level walking. Foot-obstacle contact was detected visually. The data from the non-tripping trials were averaged and the means used to perform the statistical analyses. When stepping over obstacles of different heights the effects of obstacle location on crossing speed, swing time from toe-off to when the toe was over the obstacle, vertical toe-obstacle clearance, height of the hip joint, joint angles when the toe was over the obstacle, and average angular velocities of the hip, knee, and ankle joints of the trailing limb in the flexion-extension direction were tested using two-way ANOVA with repeated measures (SYSTAT, Inc., Evanston, IL). The Greenhouse-Geiser adjustment to the degrees of freedom was used in assessing significance levels. An a"0.01 level of significance was used to account for multiple comparisons. If a significant difference was detected, the polynomial test was performed at the a"0.05 level of significance to determine the trend (linear, quadratic, or cubic). Logistic regression was used to access the odds 687 ratio to determine if the occurrence of foot-obstacle contacts were associated with obstacle height and toe-obstacle distance at the 0.05 level of significance. 3. Results Reducing the horizontal toe-obstacle distance resulted in less flexion of the hip, knee, and ankle joints when the toe of the trailing foot was directly over the obstacle (Table 1). Flexion of the knee and hip decreased linearly (p(0.0001) as toe-obstacle distance decreased and increased linearly (p(0.0001 and p"0.0004, respectively) as obstacle height increased. Abduction and external rotation of the hip increased linearly (p"0.002) as toe-obstacle distance decreased. Flexion of the ankle changed linearly (p"0.0001) from dorsiflexion to plantarflexion as toe-obstacle distance decreased. There was also a significant height by distance interaction effect (p"0.0004). Table 1 Joint angles (deg) of the trailing limb when the toe was directly over the obstacle Obstacle height Obstacle location 51 mm 10% 20% 30% 40% Internal(#)/external(!) rotation Knee joint Flexion(#)/extension(!) Ankle joint Dorsi(#)/plantar(!) flexion 10.5 $5.3 !6.6 $3.6 !3.1 $4.2 82.8 $6.6 !9.2 $6.9 11.5 $3.4 !5.6 $3.5 !3.0 $4.2 84.5 $4.7 !3.6 $6.9 14.2 $3.9 !5.4 $2.9 !2.7 $4.0 89.8 $5.2 0.5 $5.7 15.5 $3.2 !5.1 $3.1 !1.6 $4.7 89.0 $5.3 2.0 $5.1 Hip joint Flexion (#)/extension(!) 153 mm 13.7 16.4 $5.7 $4.8 17.4 $3.5 Adduction(#)/abduction(!) !6.0 $2.7 !5.0 $3.0 Internal(#)/external(!) Rotation !1.9 $5.0 Knee joint Flexion(#)/extension(!) 93.1 $8.8 Ankle joint Dorsi(#)/plantar(!) flexion Hip joint Flexion (#)/extension(!) Adduction(#)/abduction(!) p-values" 102 mm SelfSelected 10% 20% 30% 40% SelfSelected! 20.0 $4.3 !4.4 $3.1 !1.3 $4.7 95.5 $6.9 5.3 $5.8 12.2 $6.5 !6.2 $3.1 !3.4 $4.2 85.7 $8.0 !8.0 $10.1 14.2 $4.2 !5.7 $3.3 !2.1 $4.4 91.6 $5.2 !5.1 $8.6 16.0 $3.3 !5.0 $3.1 !2.4 $4.5 93.4 $4.7 1.8 $7.1 18.6 $4.5 !4.3 $3.1 !1.5 $4.1 97.6 $8.1 2.3 $6.8 22.7 $5.3 !4.1 $2.9 !0.9 $4.5 103.4 $7.1 7.1 $7.2 20.1 $3.8 24.7 $5.9 204 mm 17.3 17.7 $9.5 $5.6 19.8 $6.0 21.8 $6.2 25.2 $6.8 !4.9 $2.8 !4.4 $2.9 !4.5 $3.4 !5.9 $2.7 !5.6 $3.3 !5.5 $3.3 !5.1 $3.1 !5.3 $3.8 !2.0 $4.4 !1.5 $4.5 !1.0 $4.7 !0.9 $4.6 !2.3 $5.0 !1.4 $4.7 !1.8 $4.2 !0.9 $4.0 !1.0 $4.7 94.8 $5.5 97.4 $5.4 102.1 $5.6 109.7 $7.4 101.5 103.0 $11.4 $6.6 103.6 $7.6 106.5 $6.9 113.6 $7.8 !1.2 !1.2 $10.7 $6.3 0.8 $8.2 2.7 $6.7 6.5 $7.9 0.7 0.2 $10.4 $8.1 0.6 $7.5 3.9 $6.3 7.7 $8.4 p "0.00026 H p (0.00001 L p "0.48 HL p "0.18 H p "0.0045 L p "0.35 HL p "0.068 H p "0.0005 L p "0.52 HL p (0.00001 H p (0.00001 L p "0.099 HL p "0.0087 H p (0.00001 L p "0.00043 HL ! The self-selected distance ranged from 42.1 to 44.0% of step length for all obstacle heights. " p-values were for the repeated measures ANOVA. p : p-value for the effect of obstacle height; p : p-value for the effect of toe-obstacle distance; H L p : p-value for the interaction between obstacle height and toe-obstacle distance. HL 688 L-S. Chou, L.F. Draganich / Journal of Biomechanics 31 (1998) 685—691 Fig. 1. The vertical toe-obstacle clearance of the trailing limb decreased linearly as toe-obstacle distance decreased when stepping over the obstacle of 51 and 102 mm heights and decreased quadratically as toe-obstacle distance decreased when stepping over the obstacle of 153 and 204 mm heights. In this and the following figures error bars represent 1 standard deviation. Fig. 2. Reducing the toe-obstacle distance of the trailing limb resulted in contact of the trailing foot with the obstacle of 153 and 204 mm heights. The total number of obstacle contacts increased with obstacle height and with decreasing toe-obstacle distance. Numbers given at the data points represent the total number of contacts for all subjects and for the number of subjects contacting the obstacle. For example, 16(N"12) indicates that there were a total of 16 obstacle contacts for the group of subjects with 12 of the subjects contacting the obstacle of 204 mm height at a distance of 10%. Vertical toe-obstacle clearance of the trailing foot decreased significantly (p"0.0084) as horizontal toe-obstacle distance decreased for any of the obstacle heights (Fig. 1). The clearance decreased linearly (p)0.041) when stepping over the obstacle of 51 and 102 mm heights and decreased quadratically (p)0.015) when stepping over the obstacle of 153 and 204 mm heights as toe-obstacle distance decreased. Reducing the toe-obstacle distance resulted in toeobstacle contact of the trailing (but not the leading) foot, the closer the obstacle, the greater the number of footobstacle contacts (Fig. 2). Contact of the trailing foot Fig. 3. When the toe was directly over the obstacle the average height of the hip of the trailing limb increased linearly as obstacle height increased. occurred when stepping over the obstacle of 153 mm height for locations of 10, 20, and 30% of step length and when stepping over the obstacle of 204 mm height for locations of 10, 20, 30, and 40% of step length. A total of 10 obstacle contacts occurred for the first trial, 19 for the second trial, and 11 for the third trial. Both obstacle height and toe-obstacle distance were found to be significantly associated with the number of foot-obstacle contacts (p)0.0001). Swing time of the trailing limb from toe-off to when the toe was over the obstacle decreased linearly (p(0.0001) as toe-obstacle distance decreased and increased linearly (p(0.0001) as obstacle height increased (Table 2). Crossing speed was not affected by toe-obstacle distance, but decreased linearly (p(0.0001) as obstacle height increased. The angular velocity of knee flexion increased linearly (p(0.0001) as toe-obstacle distance decreased and increased linearly (p"0.008) as obstacle height increased (Table 3). The angular velocity of hip flexion decreased quadratically (p"0.0001) as toe-obstacle distance decreased. The angular velocity of ankle flexion changed linearly (p"0.0001) from dorsiflexion to plantar flexion as toe-obstacle distance decreased. When the toe of the trailing foot was directly over the obstacle the height of the hip was not affected by toeobstacle distance, but increased linearly (p"0.0001) with obstacle height (Fig. 3). The mean toe-obstacle distances measured, 13.8, 20.9, 27.4, and 35.0% of the step length, were different from those desired, 10, 20, 30, and 40%, respectively. However, the measured distances were significantly different from each other (p(0.0001). When stepping over an obstacle in a self-selected manner the mean toe-obstacle distance for the obstacle heights ranged from 42.1 to 44.0% of the step length found for unobstructed level walking. This distance was not affected by obstacle height. Each of the subjects reported not being fatigued at the end of testing. L-S. Chou, L.F. Draganich / Journal of Biomechanics 31 (1998) 685—691 689 Table 2 Temporal distance measurements of gait when stepping over the obstacle of each height at each toe-obstacle distance Obstacle height Obstacle location Swing Time (toe-off to obstacle)(s) Crossing speed (m s~1) 51 mm 10% p-values! 102 mm 20% 30% 40% Self-Selected 0.098 0.107 0.117 0.127 0.155 $0.023 $0.018 $0.017 $0.016 $0.027 1.19 1.21 1.22 1.22 1.21 $0.13 $0.12 $0.12 $0.13 $0.13 10% 20% 30% 40% Self-Selected 0.111 0.121 0.129 0.146 0.175 $0.023 $0.027 $0.020 $0.022 $0.027 1.16 1.18 1.18 1.19 1.17 $0.16 $0.13 $0.12 $0.13 $0.12 153 mm 204 mm Swing Time (toe-off to obstacle)(s) 0.139 0.137 0.141 0.154 0.186 $0.034 $0.028 $0.024 $0.019 $0.028 0.159 0.156 0.159 0.168 0.202 $0.036 $0.028 $0.023 $0.028 $0.030 Crossing speed (m s~1) 1.12 1.13 1.16 1.17 1.16 $0.14 $0.14 $0.13 $0.13 $0.11 1.08 1.12 1.13 1.14 1.11 $0.14 $0.11 $0.14 $0.13 $0.11 p (0.00001 H p (0.00001 L p "0.183 HL p (0.00001 H p "0.014 L p "0.46 HL ! p-values were for the repeated measures ANOVA. p : p-value for the effect of obstacle height; p : p-value for the effect of toe-obstacle distance; p : H L HL p-value for the interaction between obstacle height and toe-obstacle distance. Table 3 Average angular velocities (deg/sec) of flexion of the joints of the trailing limb from toe-off to when the toe was directly over the obstacle Obstacle height Obstacle location 51 mm 10% p-values! 102 mm 20% 30% 40% SelfSelected 10% 20% 30% 40% SelfSelected Hip joint Flexion (#)/Extension(!) 155.3 168.4 173.2 183.5 180.9 $37.5 $31.4 $26.5 $28.2 $22.8 156.0 165.0 178.5 173.1 171.0 $39.2 $38.1 $30.9 $21.9 $31.5 Knee Joint Flexion(#)/extension(!) 418.0 383.3 382.7 351.2 337.9 $53.4 $41.7 $35.4 $45.0 $34.2 415.9 412.4 397.8 380.5 358.3 $53.3 $45.1 $39.4 $39.0 $41.4 Ankle Joint Dorsi(#)/plantar(!) flexion !69.3 !32.1 30.3 38.1 58.8 $87.0 $42.6 $32.8 $33.0 $31.7 !61.5 !34.0 18.2 37.8 60.2 $73.9 $50.5 $37.1 $36.1 $31.6 153 mm 204 mm Hip Joint Flexion (#)/extension(!) 141.0 163.9 173.3 180.2 167.5 $32.4 $36.5 $33.6 $35.1 $29.8 135.3 149.7 162.4 165.5 158.3 $42.4 $36.1 $35.6 $32.9 $27.1 Knee Joint Flexion(#)/extension(!) 416.0 395.7 410.1 397.0 381.3 $50.0 $72.1 $43.7 $45.9 $48.6 434.0 428.9 410.7 402.3 377.3 $62.8 $56.5 $59.1 $47.6 $45.3 Ankle Joint Dorsi(#)/plantar(!) flexion !26.8 !10.8 14.3 35.4 53.1 $65.4 $45.2 $44.2 $25.0 $33.5 !9.5 7.9 32.3 42.9 53.6 $57.0 $40.6 $39.6 $34.9 $36.7 p "0.01 H p (0.00001 L p "0.586 HL p "0.006 H p (0.00001 L p "0.043 HL p "0.016 H p (0.00001 L p "0.032 HL ! p-values were for the repeated measures ANOVA. p : p-value for the effect of obstacle height; p : p-value for the effect of toe-obstacle distance; p : H L HL p-value for the interaction between obstacle height and toe-obstacle distance. 4. Discussion Falls are a serious problem among the elderly and tripping over obstacles is the most frequently mentioned cause of falls. We conducted this study to test the hypothesis that reducing the horizontal distance between the trailing foot and obstacle, during stance just prior to stepping over the obstacle, would reduce flexion of the hip, knee, and ankle joints of the trailing limb when the toe is over the obstacle to reduce vertical toe-obstacle clearance and increase the risk of tripping. We discovered that reducing the toe-obstacle distance resulted in linear decreases in flexion of the trailing hip, knee, and ankle when the trailing foot reached the obstacle, decreases in 690 L-S. Chou, L.F. Draganich / Journal of Biomechanics 31 (1998) 685—691 toe-obstacle clearance of the trailing limb, and in contact of the trailing (but not the leading) foot with the obstacle, the shorter the distance, the greater the risk of contact with the obstacle. Although much care was taken, our methodology included several sources of error. These consisted of identifying the axes of the body-embedded coordinate systems (i.e., of the thigh, shank, and foot) using bony landmarks, visually aligning the axes of the IRED clusters with those of the thigh, shank, and foot, and the error in our optoelectronic system, approximately 5 mm. In support of the validity of our results, the three-dimensional joint angles reported from our laboratory using this methodology (Draganich et al., 1995; Chou, 1995) were in good agreement with those reported from other laboratories (Kadaba et al., 1990; LaFortune et al., 1992). There were also discrepancies between the desired toe-obstacle distances and those measured. This was because we allowed the toe of the trailing foot to land within of $5 cm of the target before stepping over the obstacle. However, the means of the distances measured were within 5% of the desired distances and were significantly different from each other. Moreover, obstacle location was found to have significant effects on ten of the variables that we studied, the discrepancies in distance notwithstanding. Toe-obstacle clearance decreased linearly when stepping over the obstacle of 51 and 102 mm heights and quadratically when stepping over the obstacle of 153 and 204 mm heights as toe-obstacle distance decreased. Although a linear trend in clearance was found for the lowest height, there was some variation from linearity. An explanation for this variation is that this height represented little, if any, challenge, obscuring or moderating the subjects’ responses. An explanation for the change in trends from linear to quadratic is that avoiding contact with the obstacle of 153 mm height required a more vertical trajectory of the trailing foot for a toe-obstacle distance of 10% than did the obstacle of 102 mm height. As the height increased to 204 mm a more vertical trajectory was also required to avoid contact with the obstacle for a toe-obstacle distance of 20%. The distribution of obstacle contacts found for the three trials (10 for the first trial, 19 for the second, and 11 for the third) did not indicate a trend toward increased obstacle contact with time. This suggests that fatigue was not a factor in these young active adults. Reducing the toe-obstacle distance below that selfselected led to reduced flexion of the joints of the trailing limb when the toe was over the obstacle. For example, stepping over the obstacle of any height for a toe-obstacle distance of 10% of step length resulted in average reductions of 10, 15, and 11° in flexion of the trailing hip, knee, and ankle joints, respectively, compared with those found for the self-selected distance. This is important because the preliminary results of a parallel study revealed trends towards significant differences in hip, knee, and ankle flexion of the trailing limb between successful and failed attempts to cross over obstacles (Draganich and Chou, 1997). The height of the trailing hip was not found to be significantly affected by toe-obstacle distance. Thus, reductions in flexion of the joints are responsible for the reductions in toe-obstacle clearance for the trailing limb when toe-obstacle distance is reduced. Decreases in toe-obstacle distance affected joint motion. When the toe of the trailing limb was directly over the obstacle hip flexion and angular velocity of hip flexion were found to decrease as toe-obstacle distance decreased. An explanation for this is that during gait flexion of the hip elevates the swing foot and moves it anteriorly. Thus, when stepping over an obstacle that is close to the trailing foot this motion would be expected to result in contact of the trailing foot with the obstacle unless adjustments to hip flexion are made. Furthermore, toe-obstacle clearance and flexion of the knee decreased and angular velocity of knee flexion increased. An explanation for this is that as toe-obstacle distance decreased, the time available for the knee to flex after toe-off decreased. The reduced time available to clear the obstacle limited flexion of the knee, reducing the clearance. To flex the knee enough to clear the obstacle required an increase in angular velocity of knee flexion. Therefore, greater angular velocity of knee flexion appears to be of primary importance in avoiding obstacle contact when stepping over an obstacle with a shorter toe-obstacle distance. Finally, during gait the ankle joint plantar flexes during toe-off, reaching maximum plantar flexion just after toe-off and then plantar flexion begins to decrease (Kadaba et al., 1990). When the toe was over the obstacle plantar flexion and angular velocity of plantar flexion of the ankle was found to increase as toe-obstacle distance decreased. This can also be explained by the reduced time available. As toe-obstacle distance decreased, the toe of the trailing limb was over the obstacle earlier in swing phase and, therefore, the degree of plantar flexion was greater. Elderly adults were reported to require approximately 20% longer simple reaction time than young adults (Welford, 1984 and 1988) and to exhibit greater hesitancy and more submovements during a line drawing task (Morgan et al., 1994). Furthermore, reductions in available response time as small as 50 or 100 ms decreased the rate of success in both young and elderly adults when crossing a virtual obstacle with the leading limb (Chen et al., 1994). In the present study, the swing time for the trailing limb from toe-off to when the toe was over the obstacle averaged 53 ms less for the 10% distance, for all four obstacle heights, than for crossing an obstacle in a selfselected manner. The reductions in swing time led to reductions in flexion of the joints and, therefore, to reductions in toe-obstacle clearance. Moreover, stepping over an obstacle with a shorter toe-obstacle distance required L-S. Chou, L.F. Draganich / Journal of Biomechanics 31 (1998) 685—691 a faster response at the knee joint and more precise control at the hip joint of the trailing limb compared to stepping over an obstacle in a self-selected manner. Thus, control of hip and knee flexion may be important to tripping in the elderly. References Blake, A.J., Morgan, M.J., Dallosso, H., Ebrahim, S.B.J., Arie, T.H.D., Fentem, P.H., Bassey, E.J., 1988. Falls by elderly people at home: prevalence and associated factors. Age and Ageing 17, 365—372. Campbell, A.J., Borrie, M.J., Spears, G.F., Jackson, S.L., Brown, J.S., Fitzgerald, J.L., 1990. Circumstances and consequences of falls experienced by a community population 70 years and over during a prospective study. Age and Ageing 19, 136—141. Chen, H.-C., Ashton-Miller, J.A., Alexander, N.B., Schultz, A.B., 1991. Stepping over obstacles: Gait patterns of healthy young and old adults. Journal of Gerontology 46, M196—203. Chen, H-C, Ashton-Miller, J.A., Alexander, N.B., Schultz, A.B., 1994. Effects of age and available response time on ability to step over an obstacle. Journal of Gerontology 49, M227—233. Chou, L.S., Song, S.M., Draganich, L.F., 1995. Predicting the kinematics and kinetics of gait based on the optimum trajectory of the swing limb. Journal of Biomechanics 28, 277—385. Chou, L.-S., 1995. Measurements and predictions of obstructed and unobstructed gait. Ph.D. dissertation, University of Illinois at Chicago, Chicago, IL. Chou, L.S., Draganich, L.F., 1996. Effects of obstacle height and proximity on temporal-distance measurements and on kinematics of the trailing limb. In Proceedings of 20th Annual Meeting of The American Society of Biomechanics: pp. 137—138. Chou, L.S., Draganich, L.F., Song, S.M., 1997. Minimum energy trajectories of the swing ankle when stepping over obstacles of different heights. Journal of Biomechanics 30, 115—120. Chou, L.S., Draganich, L.F., 1997. Stepping over an obstacle increases the motions and moments of the joints of the trailing limb in young adults. Journal of Biomechanics 30, 331—337. Draganich, L.F., Whitehurst, J.B., Chou, L.S., Piotrowski, G.A., Pottenger, L.A., Finn, H.A., 1995. Gait and ascending and descending steps in patients with rotating-hinge total knee replacement. In Final Program for American Academy of Orthopaedic Surgeons 62, 201. 691 Draganich, L.F., Chou, L.S., 1997. Model for producing tripping of the trailing foot when stepping over an obstacle. In Proceedings of the 1997 ASME Summer Bioengineering Conference BED-Vol 35, pp. 555—556. Gryfe, C.I., Amies, A., Ashley, M.J., 1977. A longitudinal study of falls in an elderly population: I. Incidence and morbidity. Age Ageing 6, 201—210. Kadaba, M.P., Ramakrishnan, H.K., Wootten, M.E., 1990. Measurement of lower extremity kinematics during level walking. Journal of Orthopaedic Research 8, 383—392. LaFortune, M.A., Cavanaugh, P.R., Sommer, H.J.III., Kalenak, A., 1992. Three-dimensional kinematics of the human knee during walking. Journal of Biomechanics 25, 347—357. McFadyen, B.J., Winter, D.A., 1991. Anticipatory locomotor adjustments during obstructed human walking. Neuroscience Research Communications 9, 37—44. McFadyen, B.J., Magnan, G.A., Boucher, J.P., 1993. Anticipatory locomotor adjustments for avoiding visible, fixed obstacles of varying proximity. Human Movement Science 12, 259—272. Morgan, M., Phillips, J.G., Bradshaw, J.L., Mattingley, J.B., Iansek, R., Bradshaw, J.A., 1994. Age-related motor slowness: simple strategic? Journal of Gerontology 49, M133—139. Overstall, P.W., Exton-Smith, A.N., Imms, F.J., Johnson, A.L., 1977. Falls in the elderly related to postural imbalance. British Medical Journal 1, 261—264. Patla, A.E., Prentice, S.D., Robinson, C., Neufeld, J., 1991. Visual control of locomotion: strategies for changing direction and for going over obstacles. Journal of Experimental Psychology 17, 603—634. Patla, A.E., Rietdyk, S., 1993. Visual control of limb trajectory over obstacles during locomotion: effect of obstacle height and width. Gait and Posture 1, 45—60. Prudham, D., Evans, J.G., 1981. Factors associated with falls in the elderly: a community study. Age and Aging 10, 141—146. Tinetti, M.E., Speechley, K., Ginter, S.F., 1988. Risk factors for falls in a community-based prospective study of people 70 years and older. New England Journal of Medicine 319, 1701—1707. Tinetti, M.E., Speechley, M., 1989. Prevention of falls among the elderly. New England Journal of Medicine 320, 1055—1059. Welford, A.T., 1984. Between bodily changes and performance: some possible reasons for slowing with age. Exp. Aging Res. 10, 73—88. Welford, A.T., 1988. Reaction time, speed of performance, and age. Annals of New York Academy of Science. 515, 1—17. Whipple, R.H., Wolfson, L.I., Amerman, P.M., 1987. The relationship of knee and ankle weakness to falls in nursing home residents: an isokinetic study. Journal of American Geriatric Society 35, 13—20.