- SelectedWorks

Minia University
From the SelectedWorks of Emad Gameil Shehata E. G. Shehata
Spring March 10, 2013
Direct power control of wind-turbine-driven
DFIG during transient grid voltage unbalance
Emad Gameil Shehata, E. G. Shehata
Available at: http://works.bepress.com/dr_emad_shehata_e_g_shehata/2/
WIND ENERGY
Wind Energ.
(2013)
Published online in Wiley Online Library (wileyonlinelibrary.com). DOI: 10.1002/we.1619
RESEARCH ARTICLE
Direct power control of wind-turbine-driven DFIG during transient grid voltage unbalance
E. G. Shehata
Electric Engineering Department, Faculty of Engineering, Minia University, Minya, Egypt
ABSTRACT
In this paper, a direct power control (DPC) of a wind-turbine-driven doubly fed induction generators (DFIGs) under unbalanced network voltage conditions is studied. Variations of the stator output active, reactive and electromagnetic powers are fully deduced in the presence of negative sequence supply voltage. The rotor side converter is controlled on the basis of DPC to eliminate the electromagnetic torque oscillations at double supply frequency under unbalanced stator supply. The rotor voltage references estimation requires only simple calculations without any integral operation.
The proposed control scheme removes rotor current regulators and the decomposition processing of positive and negative sequence rotor currents. The performance of the proposed and conventional DPC schemes is compared under the same operating conditions. Simulation results using Matlab/Simulink are carried out for a 1.5 MW DFIG wind generation system to show the validity of the proposed scheme during unbalanced voltage supply. Copyright © 2013 John Wiley & Sons, Ltd.
KEYWORDS doubly fed induction generator; direct power control; rotor side converter control; voltage network unbalance
Correspondence
E. Shehata, Electric Engineering Department, Faculty of Engineering, Minia University, Minya, Egypt.
E-mail: emadgameil@eng.miniauniv.edu.eg
Received 25 March 2012; Revised 16 January 2013; Accepted 10 March 2013
1. INTRODUCTION
Doubly fed induction generators (DFIGs) have been widely used for large-scale wind generation systems. Their control and operation have been the subject of intense research during the last few years. Wind farms based on the DFIGs with converters rated at 25
–
30% of the generator rating for a given rotor speed variation range of 25% are becoming increasingly popular. Compared with the wind turbines using fi xed speed induction generators or fully fed synchronous generators with full size converters, the DFIG-based wind turbines offer not only the advantages of variable speed operation and four-quadrant active and reactive power capabilities but also lower converter cost and power losses.
1,2
The response and performance of DFIG-based wind turbines during steady-state and transient conditions under symmetrical stator voltage supply are now well understood. However, both transmission and distribution networks can have steady-state and transient voltage unbalances, and it is important that DFIG systems can operate satisfactorily under such conditions. If voltage unbalance is not taken into account by the DFIG control system, a small unbalanced stator voltage could result in large oscillations of torque and output power. The operation and response of the DFIG wind turbine system under grid disturbances and asymmetrical voltage dips were studied and analyzed by Petersson et al .
1 and Lopez et al .
2
Because of the relatively small rating of the rotor side converter (RSC) compared with the generator rating, it only provides partial control of the system. Therefore, an overcurrent on the RSC and subsequent overvoltage on the converter dc link due to the excessive power coming from the rotor side during network disturbance easily occur and become two main concerns to system safety.
3
It has been found that wind farms connected to distribution networks periodically experience higher voltage unbalance of greater than 2%, and this has caused a large number of trips.
4,5
Various types of control designs have been proposed for studying the behavior of DFIG-based wind-turbine system during normal operation. Most existing models widely use conventional vector control based on stator fl ux orientation
(SFO) or stator voltage orientation (SVO). However, the existing control designs assume that the stator voltage is ideal, i.e. the frequency and amplitude of the stator or grid voltage are constant, and the dynamic characteristic of the stator magnetizing current is not considered. Such systems can provide good dynamic response during normal operation
Copyright © 2013 John Wiley & Sons, Ltd.
DPC of wind-turbine-driven DFIG E. G. Shehata condition, but the performance may be degraded during AC voltage disturbance. Different algorithms were proposed to improve the vector control of the DFIG system during network voltage unbalance.
3 – 10
Alternative approaches to fi eld oriented control such as direct self control and direct torque control (DTC) have been proposed for cage rotor induction machines. In these strategies, two hysteresis controllers, namely torque and fl ux controllers, are used to determine the instantaneous switching state for the inverter.
11
These methods of control are computationally very simple and do not require rotor position information. Similar to DTC of induction machines, a direct power control (DPC) of DFIG-based wind turbine systems has been proposed recently under balanced grid voltage conditions.
11 – 15
The instantaneous switching state of the RSC is determined on the basis of the stator active and reactive powers. Thus, unlike existing DTC techniques, measurements are carried out at one terminal of the machine, whereas the switching action is carried out at another terminal.
11
Switching vectors were selected from the optimal switching table by using the estimated rotor fl ux position and the errors of the stator active and reactive powers. Since the rotor supply frequency, equal to the DFIG slip frequency, might be very low, the rotor fl ux estimation could be signi fi cantly affected by the machine parameter variations. In the work of Xu and Cartwright,
12 a DPC strategy based on the estimated stator fl ux was proposed. As the stator voltage is relatively harmonics free and fi xed in frequency, the accuracy of the stator fl ux estimation can then be guaranteed. Switching vectors were selected from the optimal switching table by using the estimated stator fl ux position and the errors of the active and reactive powers. Thus, the control system was simple, and the machine parameters
’ impact on the system performance was found to be negligible. However, like a conventional
DTC, DPC has the problem of un fi xed switching frequency, due to the signi fi cant in fl uence of the active and reactive power variations, generator speed and power controllers
’ hysteresis bandwidth. In the work of Zhi and Xu,
13 a modi fi ed
DPC strategy has been proposed based on SFO vector control in the synchronous reference frame for DFIG-based wind power generation systems with a constant switching frequency. The control method directly calculates the required rotor control voltage within each switching period, based on the estimated stator fl ux, the active and reactive powers, and their errors.
In the work of Jou et al .,
14 active and reactive power proportional-integral (PI) controllers and space vector modulation (SVM) were combined to replace hysteresis controllers used in the original DPC drive, resulting in a fi xed switching frequency of the power converter. In the work of Hu and Yuan,
15 a variable structure control scheme combined with SVM was used to calculate the required rotor control voltage directly based on the instantaneous errors of active and reactive powers.
Recently, the DPC of the DFIGs under unbalanced grid voltage has been reported.
16
–
18
In the work of Hu et al .,
16 a modi fi ed DFIG ’ s DPC model in the SVO positive and negative synchronous reference frames is developed. On the basis of the developed model, a system control strategy of the RSC is proposed for eliminating the stator output active power oscillations under unbalanced network conditions. In the work of Nian et al .,
17 two resonant controllers were used in the power control loop to regulate the active and reactive active powers without sequential decomposition involved. In the work of Shang and Hu,
18 a sliding mode controller was used to regulate the active and reactive powers in the stationary reference frame. A power compensation algorithm was used to eliminate the effect of the network voltage unbalances.
In this paper, the DPC of wind-turbine-driven DFIGs under unbalanced network voltage conditions is studied. In the proposed scheme, the RSC is controlled on the basis of DPC to eliminate the torque oscillations at double supply frequency. A simple method is proposed to estimate the reference rotor voltages. The proposed control scheme removes rotor current regulators and the decomposition processing of positive and negative sequence rotor current. To illustrate the effectiveness of the proposed scheme, a comparison is carried out between the conventional and proposed DPC schemes under the same operating conditions.
2. MAXIMUM POWER POINT TRACKING STRATEGY
The output power of a turbine is given by the following equation:
P m
¼ c
P
ð l ; b Þ r
A
2 v t
3
(1) where P m is a mechanical output power of the turbine (W), turbine swept area (m 2 ), v t is a wind speed (m s b is a blade pitch angle (degree).
1 c
P is a power coef fi cient, r is an air density (kg m
A generic equation is used to model c p
( l , b ), based on the modeling turbine characteristics of Heier, 19
3 which is
), A is a
), l is a tip speed ratio of the rotor blade tip speed to wind speed and c
P
ð l ; b Þ ¼ c
1 c
2 l i c
3 b c
4 e c
5 l i
þ c
6 l (2)
( c
The coef fi cients c
1 pmax to c
6 are c
1
= 0.5176, c
2
= 116, c
3
= 0.4, c
4
= 5, c
5
= 21 and c
6
= 0.0068. The maximum value of
= 0.48) is achieved for b = 0 and for l = 8.1. This particular value of l is de fi ned as the nominal value ( l
_nom
).
c p
19
Wind Energ.
(2013) © 2013 John Wiley & Sons, Ltd.
DOI: 10.1002/we
E. G. Shehata DPC of wind-turbine-driven DFIG
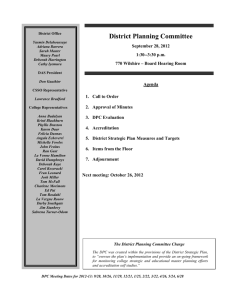
The mechanical power P m is a function of generator speed. For different wind speeds and for blade pitch angle b
= 0 , the turbine output power is illustrated in Figure 1.
3. CONVENTIONAL DPC OF DFIG UNDER BALANCED NETWORK
CONDITIONS
Figure 1 shows the generalized equivalent circuit of a DFIG represented in an arbitrary reference frame rotating at angular speed of o
.
5
According to Figure 2, the stator and rotor voltage are given, respectively, by
V s
V r
¼
R s
I s
¼
R r
I r
þ
þ d dt d dt l s l r
þ j ol s
þ j
ð o o r
Þ l r
(3) where o r is the angular rotor speed, R s and R r are the stator and rotor resistances, respectively, rotor currents, respectively. The stator and rotor fl ux can be expressed as follows:
I s and I r are the stator and l s l r
¼
L
¼ L s
I s m
I s
þ
L
þ L m
I r
I r r
(4) where L s
= L s s
+ L m and L r
= L s r
+ L m
.
L m
, and L s s and L s r are the mutual inductance and the stator and rotor leakage inductances, respectively. According to equation (4), the stator current is given as
I s
¼
L r l s
L s
L r
L m l r
L m
2
¼ l s s L s
L m l r s L s
L r
(5) where s
= ( L s
L r
L
2 m
)/( L s
L r
)
Turbine Power Characteristics (Pitch angle beta = 0 deg)
1.2
1
12 m/s
0.8
Max. power at base wind speed (11 m/s) and beta = 0 deg
0.6
0.4
0.2
7 m/s
8 m/s
9 m/s
10 m/s
6 m/s
0
11 m/s
1.2 pu
13 m/s
-0.2
0 0.2
0.4
0.6
0.8
1 1.2
Turbine speed (pu of nominal generator speed)
1.4
Figure 1.
Turbine tracking characteristic with pitch angle = 0 .
Figure 2.
Equivalent circuit of a DFIG in an arbitrary reference frame rotating at a speed of o .
Wind Energ.
(2013) © 2013 John Wiley & Sons, Ltd.
DOI: 10.1002/we
DPC of wind-turbine-driven DFIG E. G. Shehata
Under balanced network conditions, the amplitude and rotating speed of the stator fl ux are constant. Consequently, the stator fl ux remains constant, i.e.
d dt l s
¼ 0
Neglecting the voltage drop across the stator resistance, the stator voltage equation can be simpli fi ed as
V s j ol s
(6)
(7)
As shown in Figure 3, when the d -axis of the synchronous reference frame ( dq ) is fi xed to the stator voltage ( V s q viz., SVO vector control, the stator fl ux components in the d – q reference frame can be expressed as
7
= 0), l sd
¼
0
; l sq
¼
V sd
= o s
(8) where o s is the synchronous angular speed. The stator apparent power can be calculated as
S s
¼ P s
þ jQ s
¼
3
2
V s
^ s where
^ s is the conjugated space vector of I s
. Splitting the previous equation into real and imaginary parts yields
16
(9)
P s
¼ k s V sd l rd
; Q s
¼ k s V sd l rq
þ
L r
V sd
L m o s where k s
¼ 3 L m
2 s L s
L r
.
The rotor fl uxes in the dq reference frame are calculated on the basis of equation (10) as
(10) l rd
¼
P s k s V sd
; l rq
¼
Q s k s V sd
L r
V sd
L m o s
(11)
Since the stator voltage remains constant during balanced network supply, according to equation (10), the stator active and reactive power changes over a constant period of sampling time T s can be rewritten as
Δ
P s
¼ k s V sd
Δ l rd
; Δ
Q s
¼ k s V sd
Δ l rq
(12) where the active and reactive power errors are calculated as follows:
Δ P s
¼ P s
P s
; Δ Q s
¼ Q s
Q s
From equation (12), the rotor fl ux changes in the dq reference frame must follow
(13)
Figure 3.
Phasor diagram of SVO during balanced voltage operation.
Wind Energ.
(2013) © 2013 John Wiley & Sons, Ltd.
DOI: 10.1002/we
E. G. Shehata DPC of wind-turbine-driven DFIG
Δ l rd
¼
Δ
P s k s V sd
; Δ l rq
¼
Δ
Q s k s V sd
From equation (3), the rotor fl ux can be calculated as d dt l r
¼ V r
R r
I r j ð o o r
Þ l r
Within the period of T s
, the rotor fl ux changes in the dq reference frame are given by d l rd dt d dt l rq
¼ Δ l rd
=
T
¼ Δ l rq
=
T s s
¼
V rd
¼
V rq
R r
I rd
þ ð o s
R r
I rq
ð o s o r
Þ l rq o r
Þ l rd
(14)
(15)
(16)
By neglecting the rotor resistance, substituting equations (11) and (14) into equation (16) yields the reference rotor voltage in the dq reference frame as follows:
V rd
¼
V rq
¼
Δ
P s
T s k s V sd
Δ Q s
T s k s V sd
þ ð o s
þ ð o s o r
Þ
Q s o r
Þ k s V sd k s
P
V s sd
L r
V sd
L m o s (17)
The previous equation shows that the estimation of the rotor voltage references requires only simple calculations without any integral operation. In addition, the measurement of the rotor current is not required.
The reference rotor voltage can be transformed into the rotor reference frame as
V rabc
¼
V rdq e j
ð θ s
θ r
Þ
(18)
The block diagram of the conventional DPC strategy is shown in Figure 4. Three phase stator voltages and currents are measured and transformed into a stator stationary ab s reference frame. The stator output active and reactive powers are calculated from the measured stator voltage and current signals. A phase-locked loop (PLL) is used to detect the stator voltage angle
θ s and its rotating angular speed o s.
6
Then the rotor voltage reference values are predicated using equation
(17) and transformed into the rotor reference frame using the rotor slip angle obtained from a shaft encoder. Finally, a pulse width modulation (PWM) technique is used to obtain switching patterns to control the RSC with a constant
Figure 4.
Block diagram of the conventional DPC of a DFIG under balanced network conditions.
Wind Energ.
(2013) © 2013 John Wiley & Sons, Ltd.
DOI: 10.1002/we
DPC of wind-turbine-driven DFIG E. G. Shehata switching frequency. The grid side converter is controlled on the basis of the conventional vector control to regulate the
DC voltage and limit the reactive power support to the network.
13
4. DPC OF DFIG UNDER UNBALANCED NETWORK CONDITIONS
Assuming no zero sequence components, the three phase quantities such as voltage, current and fl ux may be decomposed
( into positive and negative sequences components when the network is unbalanced. As shown in Figure 5, for positive dq )
+ reference frame, the direct (
Whereas for the negative reference frame ( dq ) , the direct axis ( d ) rotates at angular speed of o to the a s
- axis being
θ s
. For vector d
F
+
) axis is fi xed to the positive stator voltage ( V
þ sd þ
) rotating at the speed of s
, the transformation between different reference frames are given as o s with the phase angle
.
F
þ dq
¼
F s ab e j o s t ;
F dq
¼
F s ab e j o s t
(19)
F
þ dq
¼
F dq e j 2 o s t ;
F dq
¼
F
þ dq e j 2 o s t
(20)
F
þ dq
¼
F r ab e j o slip þ t ;
F dq
¼
F r ab e j o slip t
(21) where F represents voltage, current and fl ux.
o slip +
= o s o r and o slip
= o s o r
Under unbalanced conditions, the voltage, current and fl ux contain both positive and negative sequence components.
According to Figure 5, F can be expressed in terms of positive and negative sequences in the positive and negative synchronous frames as
F
þ dq
¼
F
þ dq
þ
þ
F dq e j 2 o s t ;
F dq
¼
F dq
þ
F
þ dq
þ e j 2 o s t
(21)
The stator fl ux amplitude and rotating speed are no longer constant under unbalanced network conditions. Neglecting the voltage drop across the stator resistance, the stator voltage equation (equation (3)) in the synchronous reference frame can be rewritten as
V
þ sdq d dt l þ sdq
þ j o s l þ sdq
¼ j o s l þ sdq þ l sdq e j 2 o s t
(23)
As shown in Figure 5, for SVO vector control, the d -axis of the positive sequence synchronous reference frame ( dq ) is fi xed to the positive sequence stator voltage ( V
þ sq þ
¼
0) . From the previous equation, the stator fl ux components can be expressed as follows: l l
þ sd
þ sd
¼
V
þ sq
þ
¼ V sq
= o s
= o
¼
0
; l s
; l sq
þ sq
þ
¼
V
¼ V sd
þ sd
þ
= o s
= o s
(24)
The stator current in the dq
+ reference frame can be rewritten as
Figure 5.
Phasor diagram of SVO during unbalanced network voltage.
Wind Energ.
(2013) © 2013 John Wiley & Sons, Ltd.
DOI: 10.1002/we
E. G. Shehata DPC of wind-turbine-driven DFIG
I
þ sdq
¼ l þ sdq s
L s
L m l þ rdq s
L s
L r
¼ l þ sdq þ
þ l sdq s
L s e j 2 o s t
L m s
L s
L r l þ sdq þ
þ l sdq e j 2 o s t
The stator active and reactive powers can be recalculated as
(25)
P s
þ jQ s
¼
3
2
V
þ sdq
þ sdq
(26)
By substituting equations (23) and (25) into equation (26), the stator active and reactive instantaneous powers are expressed as 16
P s
Q s
¼
P so
¼ Q so
þ
P s sin2
þ Q s sin2 sin 2
ð o o s t s t
Þ þ
P
Þ þ s cos2
Q s cos2
ð o cos 2 s o t
Þ s t Þ
(27) where
Q s sin 2
P so
, Q and Q so s cos 2 are the average components of stator active and reactive powers components, and P s sin 2
, P s cos 2 and are the oscillating components at twice the grid frequency of active and reactive powers, respectively.
For clear illustration, they can be represented as
2
6
4
6
6
P
P s 0
Q s 0 s sin2
P s cos2
Q s sin2
Q s cos2
3
7
5
7
7
¼
2
3
2 s
L s o s
6
6
6
6
V
þ sd þ
2
0
þ V sd
2
2
2
V
V
þ sd
þ
þ sd þ
0
V
V sq sd
þ V sq
0
3
2
7
7
7
7
þ
2
3 L m
2 s
L s
L r
6
6
6
6
V
þ sd
þ
0
V sq
V sd
V sd
V sq
V
V
þ sd þ
V sq
V
V
0 sd sq sd
V
V
V
V sd sq
0
þ sd þ
þ sd þ
0
V
V sq
V sd
þ sd þ
0
V
0
þ sd þ
3
7
7
2
7
7
6
4 l l
þ rd þ
þ rq þ l rd l rq
3
7
5 (28)
The electromagnetic power is given as
10
P e
¼
3
Re
¼ P e 0
2
þ P h j o s e sin2 l þ sdq
þ sdq
þ j
ð o s
ð o s t Þ þ P e cos2 o r
Þ l þ rdq
ð o s t Þ
þ rdq i
(29) where P eo is the average components of electromagnetic power, and P e sin 2 and P e cos 2 are the oscillating components at twice the grid frequency of electromagnetic power, respectively. They can be represented as
2
4
P e 0
P e sin2
P e cos2
3
5 ¼
3 L m o r
2 L s o s
2
4
V
þ sd
þ
V
V sq sd
0
V sd
V sq
V
V
0 sd
þ sd
þ
V
V
þ sd
þ
0
3
2
5
6
I
I
þ rd
þ
þ rq
þ
I rd
I rd
3
7
5 (30)
From equation (2), the rotor current can be estimated as
I
þ rdq
¼ l þ rdq s
L r
L m l þ sdq s
L s
L r
¼ l þ rdq
þ
þ l rdq s
L r e j 2 o s t
L m s
L s
L r l þ sdq
þ
þ l sdq e j 2 o s t
(31)
By using equations (24) and (31), the rotor current components can be deduced in the d
– q reference frame as follows:
I
I
þ rd þ rd
¼
¼ l þ rd þ s
L r l rd s
L r
; I
þ rq þ
þ
L m
V s
L s sq
L r
¼ o s l þ rq þ s
L r
þ
;
I rq s
L m
V
þ sd þ
L
¼ s
L l r s o rq
L r s
L m
V sd s
L s
L r o s
(32)
By using the previous equation, the electromagnetic power in equation (30) can be rewritten as
Wind Energ.
(2013) © 2013 John Wiley & Sons, Ltd.
DOI: 10.1002/we
DPC of wind-turbine-driven DFIG E. G. Shehata
2
4
P e 0
P e sin2
P e cos2
3
5 ¼
3 L m o r
2 L s o s
2
V
þ sd þ
V sq
V sd
0
V sd
V sq
V sd
0
V
þ sd
þ
2
V
V sq
þ sd
þ
0
3
6
6
6
6
6
6
4 l þ rq
þ s
L r l rd s
L r l rq s L r l þ rd þ s
L r
þ
þ
L s
L m
V
þ sd þ s
L r o s
L m
V sq s
L s
L r o s s
L
L m
V sd s
L r o s
3
7
7
7
7
7
7
(33)
The previous equation can be simpli fi ed to be
2
P e 0
4
P e sin2
P e cos2
3
5 ¼
3 L
2 s
L r m o r
L s o s
2
V
þ sd
þ
V sq
V sd
0
V sd
V sq
V sd
0
V
þ sd þ
V
V sq
þ sd þ
0
3
2
6
4 l l
þ rd þ
þ rq
þ l rd l rq
3
7
5
þ
2 s
3 L
L r m
L
2 o r s
2 o s
2
2
4
2 V sd
0
0
V sq
3
5
(34)
To reduce the turbine mechanical stress, the RSC is controlled to regulate the stator active and reactive powers, and minimize the DFIG electromagnetic power oscillations, P e sin 2
= 0 and P e cos 2
= 0. By using equations (28) and (34), the stator active, reactive and electromagnetic oscillating powers can be expressed as
2
P s 0
6
4
Q s 0
P e sin2
P e cos2
3
7
5
¼
2
3 L m
2 s
L s o s
6
4
2
þ
3 L m
2 s
L r
L s
6
4
6
6
V
þ sd
þ
V
þ sd þ o r
0
V sq o s r o s
V sd
2
0
þ
V sd
2 þ
V sq
0
0 o r
V
0
þ sd þ o s
V o r o s sd
V sq
V sd
2
3
7
5
V sq
V sq
0 o r o s o r
V sd
V
þ sd þ o s
V
þ sd
þ
0
7
5
7
7
3
2
6
4 l l
þ rd þ
þ rq þ l rd l rq
3
7
5 (35)
By setting P e sin 2
= P e cos 2
= 0, the rotor fl uxes in the dq
+ and dq synchronous reference frames can be calculated as l þ rd
þ l rd
¼
2 s L s
L r
V
3 L m
D
1
¼
K dd l þ rd þ
þ sd
þ
P s 0
; l þ rq
þ
þ
K dq l þ rq þ
; l rq
¼
L r
D
3
V
þ sd
þ
L m
D
2
¼
K dq l þ rd þ
K dd l þ rq þ
(36) where
D
1
¼
V
D
3
¼
þ sd þ
2 s L s
3
Q
2 s 0
þ
V
þ sd
V
þ sd þ
2
2
þ
V sq
V sd o s
2
2
;
D
2
V sq
¼
V
þ sd þ
2
2
V sd
2
V sq
K dd
¼
V rd
=
V
þ rd þ
; and K dq
¼
V rq
=
V
þ rd þ
From the previous equation, the rotor fl ux changes can be expressed as d dt d dt l þ rd
þ l rd
¼
2 s L s
L r
V
þ sd þ
3 L m
D
1
¼ K dd d dt l þ rd
þ d dt
P s 0
;
þ K dq d dt l þ rq
þ
; d dt l þ rq
þ
¼
2 s L s
L r
V
þ sd þ
3 L m
D
2 d dt
Q s 0
; d dt l rq
¼ K dq d dt l þ rd
þ d
K dd dt l þ rq
þ
Over a constant sample time T s
, the rotor fl ux changes can be rewritten as
2
(37)
Wind Energ.
(2013) © 2013 John Wiley & Sons, Ltd.
DOI: 10.1002/we
E. G. Shehata DPC of wind-turbine-driven DFIG
Δ l þ rd þ
¼
2 s
L s
L
¼
K
3 L dq
Δ l r
V m
D
þ
1 rd þ
þ sd
þ Δ
P s 0
; Δ l þ rq þ
K dd
Δ l þ rq þ
¼
2 s
L s
L r
V
þ sd
þ
3 L m
D
2
Δ
Q s 0
; Δ l rd
¼
K dd
Δ l þ rd þ
þ
K dq
Δ l þ rq þ
; Δ l rq
(38)
From equation (3) and by neglecting the rotor resistance voltage drop, the reference rotor voltage in the dq
+ and dq synchronous frames during unbalance network voltage can be expressed as
V
þ rd þ
V rd
¼ Δ l
¼ Δ l
þ rd þ rd
=
T s
=
T s o slip
þ o slip l l
þ rq þ rq
;
V
;
V
þ rq þ rq
¼ Δ l
¼ Δ l
þ rq þ rq
=
T
=
T s s
þ o slip
þ
þ o slip l l
þ rd þ rd
;
(39)
By substituting equations (36) and (38) in the previous equation, the reference rotor voltage in the dq
+ and dq synchronous frames during unbalance network voltage can be obtained as follows:
V
þ rd
þ
V
þ rq þ
V
V rd rq
¼
¼
¼
¼
2
1
T s
1
T s s L
3 T s
3 s
L
L
2 s
L
T
K
K r m s
V
þ sd
þ
D
1 s
L r
V dd dq
L m
Δ l þ rd
þ
Δ l
D
þ sd þ
2
þ rd
þ
Δ P s 0
Δ
Q
þ s 0 o slip
þ
L
þ o slip þ r
D
L
3 m
V
D
2 s
L
3
þ sd
þ
2 s
L
L r
V m
D
;
þ sd þ
1
þ K
K dq dd
Δ
Δ l l
þ rq
þ
þ rq
þ
þ o o slip slip
K
K dq dd
P s 0
; l l
þ rd
þ
þ rd
þ
K dd l þ rq
þ
þ K dq l þ rq
þ
;
(40)
The reference rotor control voltage can be transformed into the rotor reference frame ( ab ) r as
V r ab
¼
V
þ rdq þ e j
ð θ s
θ r
Þ þ
V rdq e j
ð θ s
þ θ r
Þ
(41)
It is worth noting that, compared with the required rotor voltages output from the dual-PI rotor current regulators
5 proportional-resonant controllers,
10 or the the calculations of rotor voltage references by using the proposed DPC during the network voltage unbalance require only simple operations of multiplication and division. In particular, the decomposition process of the positive and negative sequence rotor currents is totally eliminated.
5. SYSTEM IMPLEMENTATION
The schematic diagram of the proposed DPC scheme under unbalanced network condition is shown in Figure 6. Under unbalanced network conditions, the stator voltage contains both positive and negative sequence components. The stator active and reactive powers are estimated using the measured stator voltage and current signals. To achieve accurate dq
+ and dq reference frame transformations, the PLL must lock to the positive sequence stator voltage. The required positive and negative sequence rotor voltages in the dq
+ and dq reference frames are estimated using equation (40) and then transformed into the rotor reference frame using equation (41). The rotor reference voltages in the stationary reference frame are fed to a PWM technique to provide switching patterns to control the RSC.
6. SIMULATION RESULTS
Simulations of the proposed control strategies for a DFIG-based wind generation are conducted by using the Matlab/
Simulink package. The DFIG is rated at 1.5 MW, and its parameters are listed in Table I. Figure 7 shows the schematic diagram of the tested system. The nominal dc-link voltage is 1200 V, and the switching frequencies for both converters are 1620 Hz. As shown in Figure 7, a high-frequency AC fi lter is shunt connected to the stator side to absorb the switching harmonics generated by the two converters.
Firstly, the reference values of the stator active and reactive powers are set as 0.5 and 0 pu, respectively, during constant rotor speed at 1.1 pu and 10% single-phase voltage dip. Figure 8 shows the simulation results of the conventional and proposed (new) DPC of DFIG schemes. Figure 8 shows the stator current (Is abc), rotor current (Ir abc), stator active power (Ps), stator reactive power (Qs), grid active power (Pt), grid reactive power (Qt), electromagnetic torque (Te) and dc-link voltage (Vdc) waveforms, respectively. The waveforms are enlarged between 0.65 and 0.75 s. It is shown that the system performance using the conventional control was degraded with high stator and rotor current unbalances. Since
Wind Energ.
(2013) © 2013 John Wiley & Sons, Ltd.
DOI: 10.1002/we
DPC of wind-turbine-driven DFIG E. G. Shehata
Rated power
Stator voltage
Figure 6.
Schematic diagram of the proposed DPC of DFIG during unbalanced network voltage.
Stator/rotor turns ratio
R s
R r
(referred to the stator )
Table I.
Parameters of the simulated DFIG.
1.5 MW
575 V/60 Hz
0.38
0.0071 pu
0.005 pu
L s s
L s r
(referred to the stator )
L m
Lumped inertia constant
0.171 pu
0.156 pu
2.9 pu
5.04 s
Figure 7.
Schematic diagram of the tested system.
the negative sequence components are not taken into account, the stator and total active powers, and the electromagnetic torque waveforms have signi fi cant oscillations (120 Hz). The three phase rotor currents, whose frequency equals the rotor mechanical frequency minus the stator frequency, have both the fundamental component of 6 Hz (i.e. 66
–
60) and the harmonic component of 126 Hz (i.e. 66 + 60). In contrast, the results of the proposed DPC scheme show that the stator and rotor current unbalances diminished. Also, the fi gure shows that the oscillations in the stator active, stator reactive, grid active and grid reactive powers are reduced. In addition, the electromagnetic torque oscillations are reduced. Small pulsations appeared in the dc-link voltage during unbalance, which did not affect the scheme performance.
Secondly, the performance of the conventional and new DPC schemes is evaluated during constant rotor speed at 1.1 pu and 10% double-phase voltage dip. The simulation results of the two schemes are shown in Figure 9, where the waveforms sequence is similar to that in Figure 8. As in the previous case, the results show that the proposed DPC scheme improves the stator current, rotor current, stator active power, grid active power and electromagnetic waveforms. However, pulsations appeared in the dc-link voltage, which did not affect the scheme performance.
Wind Energ.
(2013) © 2013 John Wiley & Sons, Ltd.
DOI: 10.1002/we
E. G. Shehata DPC of wind-turbine-driven DFIG
0
-1
0.4
1
0
0.5
0
-0.5
0.4
0.5
0
-0.5
0.4
1
-1
0.4
-0.4
-0.6
1250
0.4
1200
0.6
0.4
0.2
0.4
0
-0.2
0.4
0.8
0.6
0.4
0.4
0.2
0
-0.2
0.4
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.6
0.6
0.6
0.6
0.6
0.6
0.6
0.6
0.7
0.7
0.7
0.7
0.7
0.7
0.7
0.7
0.8
0.8
0.8
0.8
0.8
0.8
0.8
0.9
0.9
0.9
0.8
0.9
New DPC
Conv. DPC
0.5
0.9
New DPC
Conv. DPC
1
0.1
0
0.9
0.9
New DPC
Conv. DPC
1
0.6
0.5
New DPC
Conv. DPC
1
0.4
0.1
0
0.9
New DPC
Conv. DPC
1
-0.15
-0.5
1
1
1
1
0.7
0.75
0.7
0.75
0.7
0.75
0.7
0.75
0.5
0.6
0.7
0.8
0.9
New DPC
Conv. DPC
1
1250
1200
0.7
0.75
1150
0.4
0.5
0.6
0.7
time (sec)
0.8
0.9
1
1150
0.7
0.75
Figure 8.
Results of the conventional and proposed DPC scheme under 10% single-phase unbalance during 0.5 to 0.8 s.
Thirdly, the performance of the two schemes is tested and compared under variation of stator active and reactive powers.
The reference values of the stator active and reactive powers were initially set at 0.5 and 0 pu, respectively, with 10% voltage network unbalance. Various power steps were applied, viz., the reference reactive power from 0 to 0.5 pu at
0.8 s, and the reference active power is changed from 0.5 to 1 pu at the instant of 1.2 s, respectively. The simulation results
Wind Energ.
(2013) © 2013 John Wiley & Sons, Ltd.
DOI: 10.1002/we
DPC of wind-turbine-driven DFIG E. G. Shehata
0
-1
0.5
1
0.5
0
-0.5
-1
0.5
0.5
0
-0.5
0.5
0.5
0
-0.5
1
0.5
0.55
0.55
0.55
0.55
0.6
0.6
0.6
0.6
0.65
0.65
0.65
0.65
0.7
0.7
0.7
0.7
0.75
0.75
0.75
0.75
0.8
0.8
0.8
0.8
0.85
0.85
0.85
0.85
0.9
0.9
0.9
0.9
0.95
0.95
0.95
0.95
1
1
1
1
0.5
0.4
0.5
0.1
0
-0.1
0.5
0.55
0.55
0.6
0.6
0.65
0.65
0.7
0.7
0.75
0.75
0.8
0.8
0.85
0.85
0.9
0.9
0.95
0.95
1
1
0.5
0.4
0.5
0.1
0
-0.1
0.5
-0.45
-0.5
0.55
0.55
0.6
0.6
0.65
0.65
0.7
0.7
0.75
0.75
0.8
0.8
0.85
0.85
0.9
0.9
0.95
0.95
1
1
-0.55
0.5
1220
1200
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
1180
0.5
0.55
0.6
0.65
0.7
0.75
time (sec.)
0.8
0.85
0.9
0.95
Figure 9.
Results of the conventional and proposed (new) DPC of DFIG scheme under 10% double-phase unbalance voltage.
1 of the two schemes are shown in Figure 10 with the rotor speed fi xed at 1.1 pu. It is shown that the dynamic responses of both active and reactive powers are very fast and within a few milliseconds. Oscillations appear in the stator and rotor currents, and electromagnetic torque waveform of the conventional DPC. The fi gure shows also that the proposed scheme still preserve the high transient response of the conventional DPC. In addition, it is clear that the stator and rotor current waveforms have no unbalance. Moreover, the active and reactive powers, and torque waveforms are oscillation free.
Wind Energ.
(2013) © 2013 John Wiley & Sons, Ltd.
DOI: 10.1002/we
E. G. Shehata DPC of wind-turbine-driven DFIG
0
-1
1
0.6
0
-1
0.6
1.5
1
0.5
0
0.6
0.5
0
-0.5
-1
0.6
1.5
1
0.5
0
0.6
0.5
0
-0.5
-1
0.6
0
1
0
-1
0.6
1
1
0
-1
0.6
-1
0.7
0.7
0.7
0.7
0.7
0.7
0.7
0.7
0.8
0.8
0.8
0.8
0.8
0.8
0.8
0.8
0.9
0.9
0.9
0.9
0.9
0.9
0.9
0.9
1
1
1
1
1.1
1.1
1.1
1.1
1
1
1
1
1.2
1.2
1.2
1.2
1.1
1.1
1.1
1.1
1.3
1.3
1.3
1.3
1.2
1.2
1.2
1.2
1.3
1.3
1.3
1.3
New DPC
Conv. DPC
1.4
1.5
0.5
0.65
New DPC
Conv. DPC 0
1.4
1.5
0.65
New DPC
Conv. DPC
1.4
1.5
New DPC
Conv. DPC
0.6
0.5
0.65
0
1.4
New DPC
Conv. DPC
1.5
0.65
1.4
1.4
1.4
1.4
0.7
0.7
0.7
0.7
1.5
1.5
1.5
1.5
0.75
0.75
0.75
0.75
-0.5
-2
0.6
1300
1200
1100
0.6
0.7
0.8
0.9
1 1.1
1.2
1.3
1.4
1.5
0.65
1250
1200
1.5
1150
0.65
0.7
0.75
0.7
0.8
0.9
1 time (sec.)
1.1
1.2
1.3
1.4
0.7
0.75
Figure 10.
Simulation results of the conventional and proposed DPC of DFIG schemes during stator active and reactive powers variation under 10% single-phase voltage unbalance.
Finally, the proposed scheme performance is investigated during DFIG speed and power variations with 5% grid voltage unbalance. The DFIG was operated in the maximal power tracking mode where its active power/torque was controlled according to the optimal speed curve depicted in Figure 1. The reactive power reference is set to 0 pu, and the wind speed is changed from 9 to 12 m s value of 0.5 s for a better illustration.
10
1 at 2 s. In this test, the lumped inertia constant of the system is set to a small
Figure 11 shows the simulation results of the proposed scheme. The fi gure shows that the DFIG generation system operates satisfactory during the speed and power variations. In addition, the dc-link voltage waveform is oscillations free.
Wind Energ.
(2013) © 2013 John Wiley & Sons, Ltd.
DOI: 10.1002/we
DPC of wind-turbine-driven DFIG E. G. Shehata
1
0
-1
2
1
0
-1
2
1
0.5
0
2
1
0.5
0
2
1.2
1
0
2
-0.5
-1
2
1300
1200
1100
2
2.5
2.5
2.5
2.5
2.5
2.5
3
3
3
3
3
3
3.5
3.5
3.5
3.5
3.5
3.5
4
4
4
4
4
4
2.5
3 time (sec)
3.5
4
Figure 11.
Simulation results of the proposed scheme during rotor speed and torque variation under 5% single-phase voltage unbalance.
7. CONCLUSION
In this paper, the DPC of DFIG-based wind power generation has been investigated under unbalanced supply voltage conditions. The RSC is controlled on the basis of DPC to eliminate the electromagnetic torque oscillation. A simple algorithm is proposed to estimate the reference rotor voltage. The decomposition of positive and negative sequence of the rotor currents is not required. The validity of the proposed scheme is tested by simulation works. The performance of the proposed scheme is compared with conventional DPC under different operating conditions. The simulation results show that the proposed scheme has fast dynamic response as well as the conventional DPC. In addition, under the proposed coordinate control strategy, the control and operation of the DFIG under unbalanced conditions can be signi fi cantly improved by eliminating the oscillation in the torque. The oscillations in the stator and rotor current diminished. The proposed scheme performance is satisfactory under different operation modes, i.e. reference active, reactive powers and wind speed variation.
REFERENCES
1. Petersson A., Thiringer T., Harnefors L., Petru T.. Modeling and experimental veri fi cation of grid interaction of a DFIG wind turbine.
IEEE Trans. Energy Convers.
2005;
20
: 878
–
886.
2. Lopez J., Gubia E., Sanchis P., Roboam X., Marroyo L.. Wind turbines based on doubly fed induction generator under asymmetrical voltage dips.
IEEE Trans. Energy Convers.
2008;
23
: 321
–
330.
3. Hu J., He Y.. Dynamic modeling and robust current control of wind-turbine driven DFIG during external AC voltage dip.
J Zhejiang Univ SCIENCE A 2006;
7
: 1757
–
1764.
4. Hu J., He Y., Nian H.. Enhanced control of DFIG-used back-to-back PWM VSC under unbalanced grid voltage conditions.
J Zhejiang Univ Sci A 2007;
8
: 1330
–
1339.
5. Xu L., Wang Y.. Dynamic modeling and control of DFIG based wind turbines under network conditions.
IEEE Trans.
Power sys.
2007;
22
: 314
–
322.
6. Xu L.. Coordinated control of DFIG
’ s rotor and grid side converters during network unbalance.
IEEE Trans. Power electronics 2008;
23
: 1041
–
10498.
7. Hua J., Hea Y., Xu L.. Improved rotor current control of wind turbine driven doubly fed induction generators during network voltage unbalance.
Electric Power Systems Research 2010;
80
: 847
–
856.
Wind Energ.
(2013) © 2013 John Wiley & Sons, Ltd.
DOI: 10.1002/we
E. G. Shehata DPC of wind-turbine-driven DFIG
8. Zhou Y., Bauer P., Ferreira J. A., Pierik J.. Operation of grid connected DFIG under unbalanced grid voltage condition.
IEEE Trans. Energy Convers.
2009;
24
: 240
–
246.
9. Pena R., Cardenas R., Escobar E., Clare J., Wheeler P.. Control strategy for a doubly-fed induction generator feeding an unbalanced grid or stand-alone load.
Electric Power Systems Research 2009;
79
: 355
–
364.
10. Hu J., He Y. Reinforced control and operation of DFIG-based wind
– power-generation system under unbalanced grid voltage conditions.
IEEE Trans. Energy Convers.
2009;
24
: 905
–
914.
11. Datta R. Ranganathan V. T.. Direct power control of grid-connected wound rotor induction machine without rotor position sensors.
IEEE Trans. Power Electron.
2001;
16
: 390
–
390.
12. Xu L., Cartwright P.. Direct active and reactive power control of DFIG for wind energy generation.
IEEE Trans.
Energy Convers 2006;
21
: 750
–
758.
13. Zhi D., Xu L. . Direct power control of DFIG with constant switching frequency and improved transient performance.
IEEE Trans. Energy Convers.
2007;
22
: 110
–
118.
14. Jou S., Lee S., Park Y., Lee K.. Direct power control of a DFIG in wind turbines to improve dynamic responses.
Journal of power electronics 2009;
9
: 781
–
790.
15. Hu J., Yuan X.. VSC-based direct torque and reactive power control of doubly fed induction generator.
Renewable
Energy 2012;
40
: 13
–
23.
16. Hu J., He Y., Xu L.. Dynamic modeling and direct power control of wind turbine driven DFIG under unbalanced network voltage conditions J Zhejiang Univ Sci A 2008;
9
: 1731
–
1740.
17. Nian H., Song Y., Zhou P., He Y.. Improved direct power control of a wind turbine driven doubly fed induction generator during transient grid voltage unbalance.
IEEE Trans. Energy Convers 2011;
26
: 976
–
985.
18. Shang L., Hu J.. Sliding mode based direct power control of grid connected wind turbine driven doubly fed induction generators under unbalanced grid voltage conditions.
IEEE Trans. Energy Conversion 2012;
27
: 362
–
373.
19. Siegfried Heier, Grid Integration of Wind Energy Conversion Systems , John Wiley & Sons Ltd, 1998 ISBN 0-97143-X.
Wind Energ.
(2013) © 2013 John Wiley & Sons, Ltd.
DOI: 10.1002/we