Small-Signal Stability Analysis of Multi-Terminal VSC
advertisement

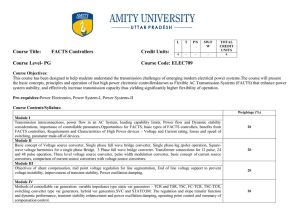
1818 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 27, NO. 4, NOVEMBER 2012 Small-Signal Stability Analysis of Multi-Terminal VSC-Based DC Transmission Systems Giddani O. Kalcon, Grain P. Adam, Olimpo Anaya-Lara, Member, IEEE, Stephen Lo, and Kjetil Uhlen, Member, IEEE Abstract—A model suitable for small-signal stability analysis and control design of multi-terminal dc networks is presented. A generic test network that combines conventional synchronous and offshore wind generation connected to shore via a dc network is used to illustrate the design of enhanced voltage source converter (VSC) controllers. The impact of VSC control parameters on network stability is discussed and the overall network dynamic performance assessed in the event of small and large perturbations. Time-domain simulations conducted in Matlab/Simulink are used to validate the operational limits of the VSC controllers obtained from the small-signal stability analysis. Index Terms—DC transmission, offshore wind generation, small-signal stability, voltage source converter. HVDC NOMENCLATURE High-voltage direct current transmission. HVAC High-voltage alternating current transmission. VSC Voltage source converter. LCC Line-commutated converter. MTDC Multi-terminal direct current transmission. PCC Point of common coupling. DFIG Doubly-fed induction generator. FRC-WT Fully-rated converter wind turbine. SSSA Small-signal stability analysis. H I. INTRODUCTION IGH-VOLTAGE dc (HVDC) transmission is emerging as the prospective technology to address the challenges associated with the integration of future offshore wind power Manuscript received June 07, 2011; revised October 03, 2011, December 05, 2011, and February 09, 2012; accepted February 24, 2012. Date of publication April 17, 2012; date of current version October 17, 2012. Paper no. TPWRS00467-2011. G. O. Kalcon, G. P. Adam, and S. Lo are with the Institute for Energy and Environment, University of Strathclyde, Glasgow G1 1XW, U.K. (e-mail: giddani@eee.strath.ac.uk; grain.adam@eee.strath.ac.uk; k.lo@eee. strath.ac.uk). O. Anaya-Lara is with the Institute for Energy and Environment, University of Strathclyde, Glasgow G1 1XW, U.K., and also with the Faculty of Engineering Science and Technology, Norwegian University of Science and Technology, NTNU, 7491 Trondheim, Norway (e-mail: olimpo.anaya-lara@eee.strath.ac.uk; olimpo.anaya-lara@ntnu.no). K. Uhlen is with the Department of Electrical Power Engineering, Norwegian University of Science and Technology, NTNU, 7491 Trondheim, Norway (e-mail: kjetil.uhlen@ntnu.no). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TPWRS.2012.2190531 plants [1], [2]. Small-signal stability analyses (SSSA) have become important in the design stage of HVDC controllers to enhance their resilience to faults, and to improve their ability to contribute to power network operation [3]. Stability studies of hybrid networks comprising HVDC and HVAC transmission are discussed in [4] and [5]. In [4], the authors investigate the potential interactions between multi-infeed LCC-HVDC converters and synchronous generators’ dynamics using SSSA. However, the LCC-HVDC controllers are not modeled in detail (only current and extinction angle controllers are incorporated). In [5], a detailed linearized model of a point-to-point LCC-HVDC is presented, and SSSA is conducted using a sampled data modeling approach. However, the LCC-HVDC controllers and ac network are not represented in detail. In [6], small-signal stability analysis is used to design the controls of a point-to-point LCC-HVDC connected in parallel with an ac line to provide damping of sub-synchronous oscillations. The state-space model is derived in detail including the dynamics of the network, the machine multi-mass shaft systems, and the HVDC system. The authors of [1] also presented a linearized model for a hybrid system that includes comprehensive dynamic models for point-to-point LCC-HVDC, ac network, and synchronous generators [7]. The paper addresses the possibility of using small-signal stability analysis to investigate sub-synchronous oscillations damping in hybrid systems. Small-signal stability analysis has also been used in [8] to design the controllers of an LCC-HVDC connecting a wind farm based on fixed-speed induction generators. The results reported contain very high-frequency components due to the interaction between the HVDC converter controller and the wind farm network. In [9], a modeling platform to analyze conventional electromechanical oscillations and high-frequency interactions in hybrid networks, comprising an LCC-HVDC and the ac grid, using small-signal stability analysis is proposed. The linearized models of the dynamic devices and the network dynamics are combined together using Kirchhoff’s laws. Then, the resultant network dynamic models are combined with the admittance matrix of the rest of the network, using current injection models. The authors in [10] present the small-signal stability analysis of ac/dc systems with a novel discrete-time representation of a two-terminal LCC-HVDC based on multi-rate sampling. The complete state-space model of the ac/dc system incorporates suitable interfaces of the various subsystems involved. The synchronous machine and ac network use a common dq-axes reference frame. The ac and dc networks are interfaced using current injection relationships. 0885-8950/$31.00 © 2012 IEEE KALCON et al.: SMALL-SIGNAL STABILITY ANALYSIS OF MULTI-TERMINAL VSC-BASED DC TRANSMISSION SYSTEMS 1819 Fig. 1. Test system. In this paper, the authors present a detailed state-space model of a more elaborated 4-terminal VSC-MTDC system connecting two offshore wind farms to an ac network. Small-signal stability analysis is carried out to define the ranges for the gains of the VSC controllers that ensure dynamic stability, and the results are confirmed via time-domain simulations in Matlab/Simulink. Also, a simple example to calculate the converter controller gains using root-locus is provided in the Appendix. The wind turbine generators are modeled as fixed-speed induction generators (FSIGs) to represent the worst-case scenario, in terms of wind turbine controllability. However, the model presented can also be used with variable-speed wind turbines such as doubly-fed induction generators (DFIGs), or fully-rated converter wind turbines (FRC-WTs), at the expense of increased modeling complexity due to the power electronic converters (and associated controllers) comprised in these type of wind turbines. II. GENERIC TEST NETWORK Fig. 1 shows the network used in this research. It consists of four VSC stations connecting two offshore wind farms to the onshore grid ( and ). Each wind farm is rated at 33 kV, 400 MVA. The dc transmission voltage is 300 kV pole-to-pole ( -bipolar). The length of the dc link cables is 150 km, and the length of the auxiliary cables is 5 km. The onshore grid comprises conventional thermal generation aggregated and modeled by a synchronous generator, SG, with ratings of 33 kV, 2400 MVA. Due to the asynchronous connection, the offshore wind farms and the onshore network are treated as independent systems in the small-signal and transient stability analyses [3]. III. SMALL-SIGNAL STABILITY MODEL DEVELOPMENT A. Assessment of Small-Signal Stability The most direct way to assess small-signal stability is via eigenvalue analysis of a model of the power system [11]–[14]. In this case, the “small-signal” disturbances are considered sufficiently small to permit the equations representing the system to be linearized and expressed in state-space form. Then, by calculating the eigenvalues of the linearized model, the “small-signal” stability characteristics of the system can be evaluated. The way in which system operating conditions and controllers’ parameters influence dynamic performance can be demonstrated by observing the influence on the loci of the dominant eigenvalues, i.e., the eigenvalues having the most significant influence on network dynamic performance. The linearized model of the test system in Fig. 1 is expressed in state-space form as [9], [15] (1) where is the state vector, is the input vector, is the state matrix, and is the input or control matrix. The eigenvalues of the state matrix provide the necessary information about the small-signal stability of the system. The participation factor matrix formed from the left and right eigenvectors of matrix gives information about the relationship between the states and the modes. B. Grid-Side VSC Converter Model Fig. 2 shows the equivalent circuit of the grid-side converters and , which control the dc link voltage and the ac voltage at buses and , respectively. The dynamic equations of these converters in the dq reference frame are (inverter operation) [8], [13], [14] (2a) (2b) (3) where and are the total resistance and inductance between the VSC and the PCC; , are the voltages at the VSC terminals and PCC, respectively; is the dc voltage; and is the dc capacitor. 1820 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 27, NO. 4, NOVEMBER 2012 Fig. 2. One-phase of a VSC converter. After linearization of (2) and (3), the linearized model of the grid-side converter is (4a) (4b) Fig. 3. Control system of the grid-side converters. (5) Fig. 3 shows the control system block diagram for both gridside converters and . From Fig. 3, the reference currents and are obtained from the dc voltage and ac voltage controllers as (6) (7) , , , and are the proportional and integral where gains of the dc voltage and ac voltage controllers, respectively. The auxiliary variables and are used to represent the integral parts of these controllers. The voltages at buses , , and (onshore grid), and their linearized forms are expressed as (8) From Fig. 3, the VSC terminal voltage obtained from the current controllers, including the feed-forward terms, is expressed in dq coordinates as (11a) (11b) where and are the active and reactive current components; and are the proportional and integral gains of the current controller; and are auxiliary variables representing the integral parts of the controllers, where and . After manipulation of the equations and change of variables, the final linearized differential equations of and are expressed as in (12) (the full matrix representation is provided in the Appendix): (12a) (9) The linearized forms of (6) and (7) are (10a) (10b) (12b) KALCON et al.: SMALL-SIGNAL STABILITY ANALYSIS OF MULTI-TERMINAL VSC-BASED DC TRANSMISSION SYSTEMS 1821 (12c) to introduced to represent where the auxiliary variables the integral parts of the dc voltage, ac voltage and current controllers are Fig. 4. Control system of the wind farm-side converters. (13a) (13b) (13c) Fig. 4 shows the control system of the wind farm-side converters. Based on Fig. 4, the reference currents, and , obtained from the active power and ac voltage controllers are (15a) (15b) (13d) C. Wind Farm-Side VSC Converter Model are the ac voltage controllers’ gains; represents where the integral part of the ac voltage controllers. The final linear representation of each wind farm-side converter is The linearized model of the wind farm-side converters and in the dq coordinates are (rectifier operation) (16a) (14a) (14b) (14c) (16b) 1822 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 27, NO. 4, NOVEMBER 2012 Fig. 5. Single-line diagram of the dc offshore network. Fig. 6. Single-line diagram of the onshore network. E. Synchronous Generator The synchronous generator in the onshore grid, SG, is modeled with a seventh-order model, including excitation and turbine-governor control [14], [16]. F. Wind Farm Based on Fixed-Speed Induction Generator (16c) The offshore wind farms are assumed fixed-speed with fifthorder model induction generators. A detailed state-space model including the static capacitors is given in the Appendix [17], [18]. Variable-speed wind turbines such as DFIG or FRC-WT can also be used, but at the expense of increased model complexity due to the power converters (and associated controllers), incorporated in these wind turbine generator technologies. G. Onshore Network (16d) The onshore network in Fig. 6 is modeled using the impedance matrix (18) based on the matrix partitioning technique (load buses are neglected). The current and voltage in each bus is referred to a common reference frame as described in [16], [19] (16e) (16f) (18) where is the reduced impedance matrix. The voltage-current relationship is (19) The matrix form of (16) is given in the Appendix. The state-space representation of the onshore network is D. DC Offshore Network The dc network in Fig. 1 is represented by a set of quasisteady-state equations, which are linearized as follow (the dc link voltages and currents are shown in Fig. 5). The converter stations are based on simple two-level converter with common dc link capacitors, which attenuate high-frequency harmonics that may result from any transient in a similar manner as dc cable series inductance do: (20) where , and and are the currents and voltages in buses , . R and X are the impedance matrix components. IV. FORMULATION OF THE OVERALL LINEARIZED SYSTEM (17) The complete state-space representation of the test system in Fig. 1 is formulated by combining the individual state-space models of the wind farms, offshore and onshore converters, dc network, onshore ac network, and synchronous generator, as KALCON et al.: SMALL-SIGNAL STABILITY ANALYSIS OF MULTI-TERMINAL VSC-BASED DC TRANSMISSION SYSTEMS shown by the block diagram in the Appendix. The dc currents and voltages in (17) are used to link the grid-side converters to the offshore converters. The synchronous generator and wind farms are linked to the converters using nodal theory. The complete state-space matrix has a dimension of 56 56. 1823 TABLE I EIGENVALUES OF TEST SYSTEM FOR THE BASE-CASE SCENARIO V. SMALL-SIGNAL STABILITY ANALYSIS The small-signal stability of the test network is assessed using eigenvalue analysis. A base-case scenario is considered in order to provide a yardstick against which the influence of VSC controllers and network loading can be judged. The power flow results for the base-case scenario are shown in Fig. 1, and the eigenvalues associated with this case are given in Table I. As seen in Table I, all eigenvalues have negative real parts indicating a stable operating condition for the base-case scenario. The eigenvalues that dominate the transient response of the system are and . The participation factor matrix indicates that the synchronous generator states have a dominant effect on the complex pair (with time constant of 26.3 s, frequency of oscillation of 1.65 Hz, and 0.004 damping ratio). Therefore, any attempt to improve network damping must take these states into account. The participation factor matrix also indicates that the VSC states influence greatly the eigenvalues associated with super-synchronous oscillation modes to . Therefore, proper tuning of the VSC control parameters may result in fast damping of these oscillation modes. In addition, Table I shows that the complex pairs and (corresponding to fast transients, with frequencies of 3169 Hz, time constant of 3.18 ms, and 0.016 damping ratio) are damped out at a much faster rate. These modes are often caused by super-synchronous oscillations due to the interaction between adjacent converters, as reported in [20]. For example, modes and are associated with oscillations of the dc voltage of the two grid-side converters and and their effect on the direct-axis currents. Modes and are associated with the interaction between converters and , and and through their dc voltage and active current components. It is observed that modes and represent the interaction between the offshore converters and wind farms through their voltage control loops and reactive current components. VI. IMPACT OF VSC CONTROLS ON SMALL-SIGNAL STABILITY The transient behavior of interconnected ac/dc systems is highly dependent on the characteristics of both synchronous generators and VSC converters and their controllers. Large synchronous generators have slow response during abnormal conditions due to their relatively large inertia, while VSC converters are fast-acting devices, which can respond within tens of milliseconds and influence the transient behavior significantly. Hence, during a disturbance, the transient behavior of the interconnected ac/dc system will mainly depend on the ability of the VSC converter controllers to damp out network oscillations, and to provide the necessary reactive power during the fault, allowing sufficient time for the synchronous machines to adjust their controllers to provide further support. This section investigates the suitable range for different VSC controllers’ gains that ensures network stability (time-domain simulations are also used to validate the results). To this aim, a line-to-ground fault with fault resistance is applied at bus at with 0.05 s duration. A. Grid-Side VSC—Current Controller Effect The effect of the proportional gain of the grid-side VSCs current controllers on system stability is investigated in this section. 1824 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 27, NO. 4, NOVEMBER 2012 EFFECT OF OF THE TABLE II GRID-SIDE VSC CURRENT CONTROLLER EFFECT OF OF THE TABLE III GRID-SIDE VSC CURRENT CONTROLLER Fig. 8. Active power output of Fig. 7. Active power output of for different values of and for different values of and . TABLE IV DC LINK VOLTAGE CONTROLLER EFFECT OF VARYING OF THE EFFECT OF VARYING OF THE TABLE V DC LINK VOLTAGE CONTROLLER . It has been found that the range of that ensures system stability over the entire operating range is between (0.6–35) with best responses obtained with . In Table II, three different gains for the proportional gain ( , 1, and 10) are investigated. In this case, the pair has an oscillation frequency of 211.3 Hz with damping time of 0.002 s and 0.345 damping ratio when compared to 224 Hz with damping time of 0.025 s and 0.028 damping ratio when . The system is unstable when . Table III shows the effect of the current controller integral gains on system stability. The small-signal stability analysis indicates that the system remains stable for any value , with best responses obtained with . For example, the pair has an oscillation frequency of 3192 Hz with damping time of 0.02 s and 0.0025 damping ratio when , compared to 5048 Hz with damping time of 0.02 s and 0.0015 damping ratio when . The system is unstable if is less than 10. The time-domain simulation in Fig. 7 validates the results obtained from the small-signal stability analysis when the line-to- ground fault is applied at bus . From the participation factor matrix, it was found that the variations of influence the states associated with the active power control loops, while variations in affect those associated with the reactive power control loops, in both converters. B. DC Link Voltage Controller Effect It is found that the dc voltage controller integral gains that ensure stable operation lay in the range . Table IV shows the oscillation frequency and damping time for selected eigenvalues for different values of . The best time-domain response is achieved with the integral gain , where lower oscillation frequencies and fast damping time are observed (see Fig. 8). Table V shows the effect of the dc voltage controller proportional gain on system stability. It is established that large decreases the damping time. For example, when , the damping time for the super frequency oscillations modes is 0.025 s with 0.028 damping ratio, while the damping time is 0.01 s with 0.011 damping ratio for and 0.063 s with KALCON et al.: SMALL-SIGNAL STABILITY ANALYSIS OF MULTI-TERMINAL VSC-BASED DC TRANSMISSION SYSTEMS Fig. 9. Active power output of EFFECT OF CHANGING EFFECT OF VARYING for different values of and 1825 . TABLE VI OF GRID-SIDE CURRENT CONTROLLER TABLE VII OF THE AC VOLTAGE CONTROLLER 0.009 damping ratio with . These results are also confirmed by time-domain responses shown in Fig. 8. C. AC Voltage Controller Effect The small-signal stability analysis shows that the ac voltage has a wide operational range controller proportional gain that ensures stable system as shown in Table VI. The best response is obtained with . It is noticeable that the pair has an oscillation frequency of 224 Hz, 0.079 s damping time, and 0.009 damping ratio when compared to 220 Hz, 0.038 s, and 0.019 damping ratio for . Fig. 9 shows the time-domain simulation that validates the results obtained via small-signal stability analysis. Similarly, the best guess for the ac voltage controller integral gain, , for stable operation ranges between . The best damping response is achieved with . With this gain, the pair oscillation frequency is 227 Hz, 0.02 s damping time, and 0.35 damping ratio compared to 225 Hz and the 0.025 s damping time and 0.028 damping ratio with . The system becomes unstable with values of as shown in Table VII. The ac voltage controller integral gain corresponding to the Fig. 10. Active power at and . (B) Active power at power at during three-phase fault at . . (a) Active system breakpoint (the transition from stable to unstable) lays between 640 and 650. The shaded cells of Table VII indicate eigenvalues and have positive real parts (instability). For further validation of the VSC gain limits obtained based on small-signal stability analysis, and to investigate the VSCs response during three-phase faults, a solid three-phase fault is applied at bus , at time with a fault duration of 5 cycles (for 50 Hz). This scenario allows the robustness of VSCs controllers designs based on small-signal stability analysis to be assessed. Fig. 10 shows the power waveform at and . It can be seen that the system remains stable and returns to the pre-fault operating condition after the fault is cleared. This demonstrates the validity of the analysis presented in this paper. VII. CONCLUSION A detailed mathematical model for small-signal stability analysis of VSC-based multi-terminal dc transmission systems has been presented. The approach taken was to divide the system into smaller subsystems representing each of them by a state-space model. The individual state-space models were then integrated into a single model to give the overall representation of the network. The mathematical model developed was used to investigate the small-signal stability performance of the hybrid network utilizing the eigenvalues and the participating factors matrix. The limits for the VSC controllers’ gains were established and validated using time-domain simulations under small perturbations. It was observed that using the small-signal stability model, it was possible to design improved controllers for the VSCs of the multi-terminal dc network, which ensure stable network operation and enhanced dynamic performance. 1826 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 27, NO. 4, NOVEMBER 2012 Fig. 11. Methodology used to obtain the complete state-space model of the test system. The modeling approach and analysis presented can be extended to larger systems with an arbitrary number of converters, synchronous machines, and wind farms. is considered constant to reduce turbine. In this paper, system complexity. D. Synchronous Machine State-Space Model [14] APPENDIX The complete state-space representation of the test system in Fig. 1 is obtained by combining the individual state-space models as shown in Fig. 11. The dc currents and voltages in (17) are used to link the grid-side converters to the offshore-side converters, while the synchronous generator and wind farms are linked to the converters using current injection theory. The linearized models of individual subsystems are expressed in the form in the following subsections. A. Grid-Side Converters State-Space Model See the equation at the bottom of the next page. represents vector is the matrix matrix of state variables; that contains the interfacing variables that relate the onshore ac network and the dc network. B. Offshore Wind Farm-Side Converters State-Space Model See the first equation at the bottom of page 1828. is the matrix that contains the offshore converter state variables; represents the vector matrix of interfacing variables that relate the converter to the offshore ac network and the dc network. C. Fixed-Speed Induction Generator [17], [18] See the second equation at the bottom of page 1828. is a vector matrix of the state variable of the fixed-speed induction generator; and are interfacing variables between the fixed speed induction generator and the offshore wind farm ac network; and is also an interfacing variable that relates generator mechanical input torque to mechanical output of the See the equation at the bottom of page 1829. is the matrix that and are interfacing variables contains state variables; that relate the synchronous generator to the onshore ac network; and and also represent interfacing variables related to the synchronous machine controllers, mainly turbine and excitation systems. E. Converter Control System Design and Gains Selection The converter controller’s gains limits are first defined using eigenvalues analysis, and then gains which provide the best network dynamic performance are selected within these limits. The proposed approach uses the overall system linearized model (which involves 56 eigenvalues), making the use of root-locus for control design very complex (if possible at all). However, for demonstration purposes, in this Appendix, the control system of each converter station (using only the converter linearized model and its associated controllers) is designed using root-locus based on equations and transfer functions obtained from the linearized model of the converter (assuming a two-level voltage source converter): Current controller: Based on Fig. 2, the linearized model of the converter ac side is (E1.1) KALCON et al.: SMALL-SIGNAL STABILITY ANALYSIS OF MULTI-TERMINAL VSC-BASED DC TRANSMISSION SYSTEMS 1827 (E2.4) (E1.2) and . and are obtained from the proportional and integral (PI) controllers as , and , where and . After substitution in (E1.1) and (E1.2), and algebraic manipulations the following equations are obtained: where After Laplace manipulation of the state-space equations (E2.1)–(E2.4), the following transfer function is obtained: (E3) (E2.2) With the parameters used in the paper: and , the gains obtained from the root-locus analysis are , , , and maximum overshoot of 2.6% (these gains put the system closed-loop poles at and a zero at ). These gains do not provide a satisfactory performance over all operating conditions when the converters are connected to the system under investigation. The final gains obtained based on eigenvalue analysis of the overall system, when all possible interactions are taken into account, are , . dc voltage controller: From Fig. 2 and assuming a lossless converter, the converter dc-side dynamics can be expresses as (E2.3) (E4) (E2.1) 1828 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 27, NO. 4, NOVEMBER 2012 Using Taylor series with the higher-order terms neglected, the linearized form of (E4) is obtained as (E5) Let and KALCON et al.: SMALL-SIGNAL STABILITY ANALYSIS OF MULTI-TERMINAL VSC-BASED DC TRANSMISSION SYSTEMS and the variable be obtained from the dc voltage controller as and , then the linearized form of the differential equations that described the dc side, including dc voltage controller are (E6.1) (E6.2) After Laplace manipulation of equations (E6.1) and (E6.2), the transfer function for the dc voltage controller is (E7) Selection of the dc voltage controller gains can be accomplished in a similar way as that for the current controller using root-locus or frequency-domain techniques. Normally, the converter load angle (the angle of the converter terminal voltage relative to the voltage at the point of common coupling) is sufficiently small as the total impedance between the converter terminals and the point of common coupling must be kept small in order not to 1829 compromise the available dc voltage for reactive power compensation, and similarly . Therefore the reference current is obtained: , where and are normalized by . In the control system design, the authors rely on feed-forward terms of the current controller, which are introduced during the decoupling of from to improve system disturbance rejection. However, the controllers’ gains obtained from such designs are always subject to change when the converter is operated in a complex power system. For this reason, the gains obtained from the control design are used only as a starting point; and the final values of the gains are selected as those that may produce the best performance taking into account all the system interactions. Gain fine-tuning is also employed in an attempt to establish the influence of voltage source converter gains and controllers on the overall network performance. ACKNOWLEDGMENT The authors would like to thank NOWITECH for facilitating the interaction between the researchers and institutions involved in the preparation of this research paper. Dr. O. Anaya-Lara 1830 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 27, NO. 4, NOVEMBER 2012 would like to thank Det Norske Veritas (DNV) for the sponsorship provided for his Visiting Professorship at NTNU, Trondheim, Norway. REFERENCES [1] P. Bresesti et al., “HVDC connection of offshore wind farms to the transmission system,” IEEE Trans. Energy Convers., vol. 22, pp. 37–43, 2007. [2] H. Li and Z. Chen, “Overview of different wind generator systems and their comparisons,” IET Renew. Power Gen., vol. 2, pp. 123–138, 2008. [3] C. Osauskas and A. Wood, “Small-signal dynamic modeling of HVDC systems,” IEEE Trans. Power Del., vol. 18, pp. 220–225, 2003. [4] C. Karawita and U. D. Annakkage, “Multi-infeed HVDC interaction studies using small-signal stability assessment,” IEEE Trans. Power Del., vol. 24, pp. 910–918, 2009. [5] X. Yang and C. Chen, “HVDC dynamic modelling for small signal analysis,” Proc. Inst. Elect. Eng., Gen., Transm., Distrib., vol. 151, pp. 740–746, 2004. [6] K. Dong-Joon et al., “A practical approach to HVDC system control for damping subsynchronous oscillation using the novel eigenvalue analysis program,” IEEE Trans. Power Syst., vol. 22, pp. 1926–1934, 2007. [7] C. Karawita and U. D. Annakkage, “HVDC-generator-turbine torsional interaction studies using a linearized model with dynamic network representation,” in Proc. Int. Conf. Power Systems Transients (IPST2009), Kyoto, Japan, Jun. 3–6, 2009. [8] W. Li et al., “Power-flow control and stability enhancement of four parallel-operated offshore wind farms using a line-commutated HVDC link,” IEEE Trans. Power Del., vol. 25, pp. 1190–1202, 2010. [9] C. Karawita and U. D. Annakkage, “A hybrid network model for small signal stability analysis of power systems,” IEEE Trans. Power Syst., vol. 25, pp. 443–451, 2010. [10] R. K. Pandey, “Stability analysis of AC/DC system with multirate discrete-time HVDC converter model,” IEEE Trans. Power Del., vol. 23, pp. 311–318, 2008. [11] O. Anaya-Lara et al., “Influence of windfarms on power system dynamic and transient stability,” Wind Eng., vol. 30, no. 2, pp. 107–127, 2006. [12] P. Kundur et al., “Definition and classification of power system stability IEEE/CIGRE joint task force on stability terms and definitions,” IEEE Trans. Power Syst., vol. 19, pp. 1387–1401, 2004. [13] D. Y. Wong et al., “Eigenvalue analysis of very large power systems,” IEEE Trans. Power Syst., vol. 3, pp. 472–480, 1988. [14] P. M. Anderson and A. A. Fouad, Power System Control and Stability. New York: Wiley, 2007. [15] Y. Shao and Y. Tang, “Voltage stability analysis of multi-infeed HVDC systems using small-signal stability assessment,” in Proc. 2010 IEEE PES Transmission and Distribution Conf. Expo., 2010, pp. 1–6. [16] P. Kundur, Power System Stability and Control, ser. Electric Power Research Institute, Power System Engineering Series. New York: McGraw-Hill, 1994. [17] A. Radunskaya et al., “A dynamic analysis of the stability of a network of induction generators,” IEEE Trans. Power Syst., vol. 23, pp. 657–663, 2008. [18] S. Tohidi et al., “Influence of model simplifications and parameters on dynamic performance of grid connected fixed speed wind turbines,” in Proc. 2010 XIX Int. Conf. Electrical Machines (ICEM), 2010, pp. 1–7. [19] M. A. A. Alyan et al., “Assessment of steady state stability of a multimachine power system with and without a superconducting machine,” IEEE Trans. Power Syst., vol. 5, pp. 730–736, 1990. [20] IEEE Guide for Planning DC Links Terminating at AC Locations Having Low Short-Circuit Capacities, IEEE Std. 1204-1997, 1997. Giddani O. Kalcon received the B.Eng degree (with honors) in power system and machines from Sudan University of Science and Technology (SUST), Khartoum, Sudan, in 2001, and the M.Sc degree in electrical power system from SUST. He is currently pursuing the Ph.D. degree at the University of Strathclyde, Glasgow, U.K. His research interest include wind power integration and HVDC system. Grain P. Adam received the first-class B.Sc. and M.Sc. degrees in electrical machines and power systems from Sudan University of Science and Technology, Khartoum, Sudan, in 1998 and 2002, respectively, and the Ph.D. degree in power electronics from Strathclyde University, Glasgow, U.K., in 2007. He is currently with the Department of Electronic and Electrical Engineering, Strathclyde University, and his research interests are multilevel inverters, electrical machines, and power systems control and stability. Olimpo Anaya-Lara (M’98) received the B.Eng. and M.Sc. degrees from Instituto Tecnológico de Morelia, Morelia, México, and the Ph.D. degree from University of Glasgow, Glasgow, U.K., in 1990, 1998 and 2003, respectively. His industrial experience includes periods with Nissan Mexicana, Toluca, Mexico, and CSG Consultants, Coatzacoalcos, México. Currently, he is a Senior Lecturer at the University of Strathclyde in Glasgow. His research interests include wind generation, power electronics, and stability of mixed generation power systems. Stephen Lo received the M.Sc. and Ph.D. degrees from the University of Manchester Institute of Science and Technology, Manchester, U.K. He is a Professor at Strathclyde University, Glasgow, U.K. His research interests include power systems analysis, planning, operation, monitoring, and control, including application of expert systems and artificial neural networks, transmission and distribution management systems, and privatization issues. Kjetil Uhlen (M’95) received the M.Sc. degree and the Ph.D. degree in control engineering from the Norwegian Institute of Science and Technology (NTNU), Trondheim, Norway, in 1986 and 1994, respectively. He is currently a Professor of Electrical Engineering at NTNU and leads the NOWITECH work package on wind power integration. His main technical interests are operation and control of electric power systems.