CHAPTER 1 INTRODUCTION 1.1 HISTORY OF BRUSHLESS DC
advertisement

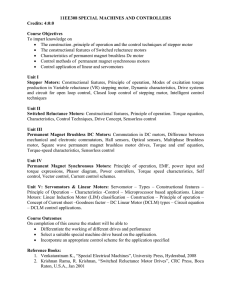
1 CHAPTER 1 INTRODUCTION 1.1 HISTORY OF BRUSHLESS DC MOTORS Brushless DC motors (BLDC) are an invaluable part of industry today. Use of these motors can save nearly any industry a great deal of time and money under the right circumstances. The BLDC motor actually represents the end, or at least the most recent end result, of a long evolution of motor technology. Before there were brushless DC motors there were brushed DC motors, which were brought on in part to replace the less efficient AC induction motors that came before. The brush DC motor was invented all the way back in 1856 by famed German inventor and industrialist Ernst Werner Von Siemens. Von Siemens is so famous that the international standard unit of electrical conductance is named after him. Von Siemens studied electrical engineering after leaving the army and produced many contributions to the world of electrical engineering, including the first electric elevator in 1880. Von Siemens's brush DC motor was fairly rudimentary and was improved upon by Harry Ward Leonard, who nearly perfected the first effective motor control system near the end of the 19th century. In the year of 1873 Zenobe Gramme invented the modern DC motor. This system used a rheostat to control the current in the field winding, which resulted in adjusting the output voltage of the DC generator, which in turn adjusted the motor speed. The Ward Leonard system remained in place all the way until 1960, when the Electronic Regulator Company's thyristor devices produced solid state controllers that could convert AC power to rectified DC power more directly. It supplanted the Ward Leonard system due to its simplicity and efficiency. 1.1.1 Advent of Brushless DC Motors Once the Electronic Regulator Company maximized the efficiency of the brush DC motor, the door was opened for an even more efficient motor device. Brushless DC motors first made the scene in 1962, when T.G. Wilson and P.H. Trickey unveiled what they called "a DC motor with solid state commutation." Remember that 2 the key element of brushless DC motors as opposed to brush DC motors is that the brushless DC motor requires no physical commutator, a revolutionary difference. As the device was refined and developed, it became a popular choice for special applications such as computer disk drives, robotics and in aircraft. In fact, brushless DC motors are used in these devices today, fifty years later, so great is their effectiveness. The reason these motors were such a great choice for these devices is that in these devices brush wear was a big problem, either because of the intense demands of the application or, for example, in the case of aircraft because of low humidity. Because brushless DC motors had no brushes that could wear out, they represented a great leap forward in technology for these types of devices. The problem was that as reliable as they were, these early brushless DC motors were not able to generate a great deal of power. 1.1.2 Modern Brushless Dc Motors That all changed in the 1980s, when permanent magnet materials became readily available. The use of permanent magnets, combined with high voltage transistors, enabled brushless DC motors to generate as much power as the old brush DC motors, if not more. Near the end of the 1980s, Robert E. Lordo of the POWERTEC Industrial Corporation unveiled the first large brushless DC motors, which had at least ten times the power of the earlier brushless DC motors. Today, there are probably no major motor manufacturers that do not produce brushless DC motors capable of high power jobs. Naturally, NMB Tech offers a wide variety of brushless DC motors for you to choose from, in sizes from 15mm in diameter to 65mm in diameter, Watt’s output range from 0.7 to maximum of 329.9. Industries with motor needs have relied on brushless DC motors for nearly fifty years, and there is every reason to believe that they will continue to do so for decades to come. Take a look at some brushless DC motors today. 3 1.2 INTRODUCTION OF BLDC MOTOR Brushless Direct Current (BLDC) motors are one of the motor types rapidly gaining popularity. BLDC motors are used in industries such as Appliances, Automotive, Aerospace, Consumer, Medical, Industrial Automation Equipment and Instrumentation. As the name implies, BLDC motors do not use brushes for commutation; instead, they are electronically commutated. BLDC motors have many advantages over brushed DC motors and induction motors. A few of these are: Better speed versus torque characteristics High dynamic response High efficiency Long operating life Noiseless operation Higher speed ranges In addition, the ratio of torque delivered to the size of the motor is higher, making it useful in applications where space and weight are critical factors. In this application note, we will discuss in detail the construction, working principle, characteristics and typical applications of BLDC motors. 1.3 CONSTRUCTION AND OPERATING PRINCIPLE BLDC motors are a type of synchronous motor. This means the magnetic field generated by the stator and the magnetic fields generated by the rotor rotate at the same frequency. BLDC motors do not experience the “slip” that is normally seen in induction motors. BLDC motors come in single-phase, 2-phase and 3-phase configurations. Corresponding to its type, the stator has the same number of windings. Out of these, 3phase motors are the most popular and widely used. This application note focuses on 3phase motors. The brushless motor, unlike the DC brushed motor, has the permanent magnets glued on the rotor. It has usually four magnets around the perimeter. The stator of the motor is composed by the electromagnets, usually four of them, placed in a cross pattern with 90o angle between them. The major advantage of the brushless motors is 4 that, due to the fact that the rotor carries only the permanent magnets, no need of winding connections to be done with the rotor, no brush-commutator pair needs to be made. This is how the brushless motors took their name from. This feature gives the brushless motor great enhancement in reliability, as the brushes wear off very fast. Moreover, brushless motors are more silent and more efficient in terms of power consumption. 1.4 MATHEMATICAL MODELLING OF BLDC MOTOR Brushless DC motors usually driven by balanced three phase waveforms. Equivalent circuit of each phase consists of a winding inductance, a resistance and induced back-emf voltage due to the rotation of the rotor. Per phase equivalent circuit of a BLDC motor is shown in Figure 1.1. Figure 1.1 Per Phase equivalent circuit of Brushless DC motor Using the equivalent circuit electrical equation can be obtained as in equation (1.1) V Ri L where, V is applied phase voltage, i is phase current, e is back emf voltage and L is phase inductance. di e dt (1.1) 5 As stated before, Brushless DC motors are usually fed with three phase balanced voltage waveforms. The voltage equations for the three phase BLDC motor are written in matrix form in equation (1.2), [25] and [27]. Va R 0 0 I a L M V 0 R 0 I d 0 L b b dt Vc 0 0 R I c 0 0 0 M L 0 I a ea 0 I b eb M I c ec (1.2) where, Va , Vb , Vc are applied phase voltages, I a , I b , I c are phase currents, L is phase inductance, R is phase resistance and M is mutual inductance Produced electromagnetic torque can be obtained by using the output power of electrical motor. Electrical output power of electrical motor is defined by production of three phase back emf voltages and phase currents. Form the mechanical point of view, power can be represented as output torque multiplied by the angular speed. Using these two definition electromagnetic torque is defined in equation (1.3). Te (ea I a eb Ib ec I c ) / w (1.3) where, w is mechanical speed of motor and Te is electromechanical torque Mechanical relation between the speed and the torque are represented in equation (1.4). dw P Te Tload dt 2 J where, w d dt (1.4) 6 Tload is load torque, J is rotating inertia, is rotor mechanical position and P is number of pole All the equations stated above are represented in stationary referenced frame. All electrical quantities (voltages and currents) are changing with the electrical frequency of the rotation. From the control point of view it is difficult to control the variables changing with time. To make the control easy these equations can be represented in synchronously rotating frame with stator. If all quantities are represented in that frame all variables become constant values and these make the system easily controlled. Figure 1.2 Stator and Rotor Reference Frames Figure1.2 shows the stationary frame and the synchronously rotating frame. d-axis is the axis of permanent magnet flux and the q-axis is the perpendicular axis to the d-axis. Voltage and current quantities can be transformed into the d-q axis quantities using Clark-park transformation matrices. Equations for transformations are stated in equation (1.5) – (1.6). ia iqs 2 cos( e ) cos( e 2 / 3) cos( e 2 / 3) i 3 sin( ) sin( 2 / 3) sin( 2 / 3) i b e e e ds i c (1.5) 7 Va Vqs 2 cos(e ) cos(e 2 / 3) cos(e 2 / 3) V sin( ) sin( 2 / 3) sin( 2 / 3) Vb e e e ds 3 V c (1.6) Equivalent of equation (1.2) in d-q axis is represented as a set of equation (1.7). Vqs Ri qs L di qs Vds Ri ds L dt eq di ds ed dt (1.7) eq wed wr (isd Ld m ) ed weq wr (isq Lq ) where, Ld is d-axis inductance, Lq is q-axis inductance, m is rotor flux linkage due to permanent magnets, d is d-axis flux linkage, we is rotor electrical speed and e is rotor electrical position. Electromagnetic torque representation Te in d-q axis is given in equation (1.8) Te 1.5 3 P miqs ( Ld Lq )iqsids 2 (1.8) TYPES OF BRUSHLESS MOTORS Brushless DC motors can be classified by rotor structural design and rotor flux direction. Classifications based on rotor structures are shown in Figure1.3. In surface mounted rotor motors magnets are mounted to the surface of rotor. This process is relatively easy and low cost process. Magnets are easily skewed in this type and skewing helps to reduce the torque oscillations (cogging torque) [26]. Also since magnets are on the surface of rotor, air gap can be large and effective and saliency effect is minimized. 8 Lq and Ld inductances are equal and this makes the reluctance torque minimized (1.8). The main drawback of this type is that magnets can detach from the rotor at high speeds. Figure 1.3 Rotor structures of BLDC motors (a) Surface Mounted Magnets, (b) Interior Mounted Magnets and (c) Buried Magnets In interior mounted magnet of motors, magnets are inserted inside the rotor rather than bounding the surface. This makes a robust design and motor can operate at high speeds. But due to differences in d and q axes inductance reluctance torque exists in this type of motors. Electrical properties of buried magnet motors are nearly same with the interior mounted magnet motors. In buried magnet motors fluxes can go through the motor shaft and to prevent this flux, nonmagnetic shafts should be used [28]. BLDC motor can also be classified in terms of flux directions. Usually BLDC motors are used in Radial Flux (RF) topology. These motors are used in servo applications. Motor axial length is longer and inertia of the rotor is kept small in order to have small response time to load changes. Axial Flux (AF) motors differ from the other types of the motors due to the flux direction and magnet construction shape of the motor. In (RF) motors, the flux lines goes through the radial direction from the rotor. In (AF) motors, flux goes through 9 the axial direction. The Radial and Axial flux motors are shown in the Figures 1.4 and 1.5. Figure 1.4 Radial Flux Brushless DC Motors Figure 1.5 Axial Flux Brushless DC Motors Axial flux motors can be designed by placing the rotor outside the stator. With this type of design disc type loads can be coupled with the motor [70]. Sometimes motor is completely inserted into load (i.e. power transmission components [29]). These 10 motors are widely used for low torque servo applications. These types of motors are used where small axial space and large radial space are needed. Main drawback of axial flux motors are presence of two air gaps (In RF type motors there is only one air gap). Mechanical design should be carefully done in AF motors. 1.6 STATOR The stator of a BLDC motor consists of stacked steel laminations with windings placed in the slots that are axially cut along the inner periphery. Traditionally, the stator resembles that of an induction motor; however, the windings are distributed in a different manner. Most BLDC motors have three stator windings connected in star fashion. Each of these windings is constructed with numerous coils interconnected to form a winding. One or more coils are placed in the slots and they are interconnected to make a winding. Each of these windings is distributed over the stator periphery to form an even numbers of poles. There are two types of stator winding variants: trapezoidal and sinusoidal motors. This differentiation is made on the basis of the interconnection of coils in the stator windings to give different types of back Electromotive Force (EMF). In addition to the back EMF, the phase current also has trapezoidal and sinusoidal variations in the respective types of motor. This makes the torque output by a sinusoidal motor smoother than that of a trapezoidal motor. However, this comes with an extra cost, as the sinusoidal motors take extra winding interconnections because of the coils distribution on the stator periphery, thereby increasing the copper intake by the stator windings. Depending upon the control power supply capability, the motor with the correct voltage rating of the stator can be chosen. Forty-eight volts, or less voltage rated motors are used in automotive, robotics, small arm movements and so on. Motors with 100 volts, or higher ratings, are used in appliances, automation and in industrial applications. The material used for the construction of the stator in the brushless direct current motor is CR10: Cold rolled 1010 steel. Its magnetic permeability is 2.2T and electric permittivity is 1. The construction of the stator of a BLDC motor is shown in Figure 1.6. 11 The performance and characteristics of the material used in BLDC motor are briefly explained in Appendix 2. Figure 1.6 Stator of BLDC Motor 1.7 ROTOR The rotor is enclosed or inserted by permanent magnet and can vary from two to eight pole pairs with alternate North (N) and South (S) poles. Based on the required magnetic field density of the rotor, the proper magnetic material is chosen to make the rotor. Ferrite magnets are traditionally used to make permanent magnets. As the technology advances, rare earth alloy magnets are gaining popularity. The ferrite magnets are less expensive but they have the disadvantage of low flux density of a given volume. In contrast, the alloy material has high magnetic density per volume and enables the rotor to compress further for the same torque. Also, these alloy magnets improve the 12 size-to-weight ratio and give higher torque for the same size motor using ferrite magnets. Neodymium (Nd), Samarium Cobalt (SmCo) and the alloy of Neodymium, Ferrite and Boron (NdFeB) are some examples of rare earth alloy magnets [32]. Continuous research is going on to improve the flux density to compress the rotor further. 1.8 THEORY OF OPERATION Each commutation sequence has one of the windings energized to positive power (current enters into the winding), the second winding is negative (current exits the winding) and the third is in a non-energized condition. Torque is produced because of the interaction between the magnetic fields generated by the stator coils and the permanent magnets. Ideally, the peak should shift positions, as the rotor moves to catch up with the stator field which is known as “Six-Step Commutation” defining the sequence of energizing the windings. 1.9 COGGING TORQUE Cogging torque is also called detent torque, and it is one of the inherent characteristics of Permanent Magnet motors. Theoretically, cogging torque is caused by the reluctance change between the stator teeth and magnetic poles on the rotor, and it is mainly the magnetic poles corners, not the whole magnetic poles, which create the cogging torque. Cogging torque is influenced by a variety of design factors of BLDC Motor. Among the factors, air gap length, slot opening, and magnetic poles pitch play important roles. Cogging torque drastically influences the control precision of PM motors used in speed and position control systems. In these control systems, usually Permanent Magnet Brushless DC motors (PMBLDC) and PM synchronous motors (PMSM) are employed. A bigger cogging torque can affect the speed, disturb the position of the system and in the precise control applications, such effects are undesired. 13 Cogging torque is a magnetic locking that occurs in the motor which results in increase of noise, vibration in motor and hence preventing the motor to rotate smoothly. Finally, it affects the enhancement of the motor performance and in serious cases, a mechanical resonant may occur so that serious destruction is caused. To significantly reduce harmful cogging torque, PM motor has become one of the most interesting research topics in the motor design and application fields. The cogging torque calculating methods and reduction measures will be discussed in the next section. 1.10 COGGING TORQUE REDUCTION METHODS With the development of high-performance PM material, PM motors are widely used in speed and position control systems. However, in slotted motors, cogging torque, which may affect the control accuracy, is produced as a result of the interaction between PMs and armature. Some advantages of this motor can be listed as their high performance, high relation of torque/volume, capability at high speed applications and electronic driven commutation. These motors have also some drawbacks in addition to all these advantages. Thus technique for reducing cogging torque plays an important role in motor design, and many studies have been carried out on the prediction and reduction of cogging torque. The various techniques have been adopted to reduce cogging torque such as magnetic poles design, skewing, and dummy slots [1] and [8]. The CAD of radial flux surface-mounted magnets were easy to fabricate and was applied successfully [2]-[5]. Asymmetric magnets and shifting angles were applied to reduce harmonics of cogging torque [3]. The 2D finite element analysis is applied successfully to surface mounted PM motors [5], [8], [13]. The radial field topology has applied FEM in optimization of PM motors [6]-[7]. Eccentric and uniform pole surface designs are proposed to make a sinusoidal magnetic flux density in air gap in order to reduce cogging torque [8]. The response surface method also uses the multi-quadric radial basis function to interpolate the objective function in design of rotor [8]-[10]. Hyper cube sampling strategy is applied to optimize a magnetic poles shape of the large scale permanent magnet motor [10]. The influence of stator tooth width on cogging torque is analyzed both theoretically 14 and experimentally [11]. Recently, some researchers proposed modifications in the air gap profile to reduce cogging torque and improve starting torque [12]. An integrated optimization process to minimize cogging torque in permanent magnet (PM) motors by a simple Gradient Descent method and the design techniques of non-uniformly distributed magnets and teeth are presented to illustrate the optimization process [14]. Many methods have been developed to minimize the cogging torque. Some of them in the literature are using the shape of lamination [15-16], using the auxiliary slots using air gap profiles [17], skewing the rotor magnets, step skewing implemented by FEA, stator slots skewing [18]-[19], adapting to different combinations of slot numbers and pole numbers [20] and adapting Iso-diametric magnet [21]. A FEA method based on a combination of electromagnetic fields and circuit equations for magnetic field modeling and torque prediction are presented in decreasing the level of cogging torque without skewing [22]. Some core shapes that reduce cogging torque is designed by using genetic algorithm [23]. The radial field topology has applied FEM in optimization of PM motors [12]. The predefined slot shapes reduce the cogging torque, which is an evolution strategy for the optimal design process to determine the slot size [24]. The Optimization of Two Design Techniques for Cogging Torque Reduction Combined with Analytical Method by a Simple Gradient Descent Method are discussed in [14]. The existing methods for cogging torque reduction are: changing the shape of lamination [1]-[2], using auxiliary slots [3]-[4], skewing the rotor magnets [5] or the stator slots [6], adapting different combinations of slot numbers and pole numbers [7]. The first four methods increase the complexity of the motor construction. The last method is effective, but it limits the choice of slots numbers. Based on Fourier expansion and energy method, the analytical expression of cogging torque is derived, which can be used to analyze the effects of design parameters on cogging torque [75][80]. 15 1.11 LITERATURE REVIEW: Mohammad Islam et al., (2004) have verified the techniques by designing the magnetic poles design, skewing, dummy slots and step skewing for reducing the cogging torque. Parag Upadhyay and Rajagopal., (2005) have done the analysis in radial-flux surface mounted magnet, air gap flux density, slot electric loading, winding factor, stacking factor, stator current density, slot space factor, magnet fraction and slot fraction. Yubo Yang., (2006) has implemented the optimization method for improved domain elimination, finite-element method and analytical method. Lijian Wu et al., (2007) have designed and analyzed the surface mounted permanent-magnet (PM) motors and auxiliary grooves are applied on the PM poles. Fei, W., and Luk, P.C.K., (2007) have designed the axial magnet pole pairing method. KyuYun Hwang et al., (2007) have analyzed the rotor pole design in spoke-Type Brushless DC Motor by Response Surface Method (RSM). Pan Seok Shin et al., (2008) have proposed a new algorithm for the shape optimization of a large-scale BLDC motor to reduce the cogging torque. In the algorithm, an adaptive RSM using the multi-quadric radial basis function is employed to interpolate the objective function. In the adaptive RSM, an adaptive sampling point insertion method is developed utilizing the design sensitivities computed by using the finite-element method to get a reasonable response surface with a relatively small number of sampling points. An adaptive response surface method with Latin hypercube sampling strategy is employed to optimize a magnet pole shape of large scale brushless BLDC motor to minimize the cogging torque. Jiang Xintong et al., (2009) have verified the tooth width and slot/pole match on cogging torque corresponding to both uniformed teeth and non-uniformed teeth. The theoretical analysis on the basis of analytical expressions of cogging torque is deduced with energy method. Yubo Yang et al., (2009) have illustrated the asymmetry magnets, in which the magnetic poles are non identical in that the irregularities cause reduction in cogging torque. Lin, D., et al., (2009) have implemented the design techniques for 16 reducing the Cogging torque in surface-mounted PM motors. The surface mounted PM motor is one of the classifications of PM motors used for high performance. Mohammed Fazil., (2010) has proposed a new air-gap profile for single-phase PMBLDC motor to improve starting torque and to reduce cogging torque. Mohammed Fazil., (2011) has implemented the Non-linear dynamic modeling of single phase PMBLDC motor. Daohan Wang et al., (2012) have verified the simple gradient descent method to reduce the cogging torque in BLDC motor. The presented optimization method can be easily achieved in motor design. The design techniques of non-uniformly distributed magnets and teeth are presented to illustrate the optimization process. First, with the assistance of an analytical motor deduced, the initial solution and feasible domain of the optimization can be easily identified. Then a simple Gradient Descent method is combined with finite element analysis to perform the optimization within the identified feasible domain. Upadhayay and Rajagopal., (2013) have designed a surface mounted BLDC motor using magnet pole shaping techniques for cogging torque reduction. Hong Seok Kim et al., (2013) have proposed the optimization of an anisotropic ferrite magnet shape and magnetization direction to maximize back-EMF of interior permanent magnet BLDC motor. Kang et al., (2013) have mathematically derived the frequency equations of back electromotive force, cogging torque and unbalanced magnetic force of a BLDC motor due to unevenly magnetized permanent magnet. The mathematical equations are experimentally validated by comparing with the measured cogging torque and unbalanced and back electro motive force of a hard disk drive spindle motor. Chang Seop Koh (1997) have verified the magnetic pole shape optimization of permanent magnet motor for reduction of cogging torque. Cogging torque reduction methods are discussed and applied to the optimum design of a small BLDC motor. Because the cogging torque has a close relation with the distribution of the magnetization, the magnetizing system for permanent magnets is analyzed numerically by using the time-stepping finite element method. Based on the remanant magnetic flux densities, the cogging torque is computed by using finite element analysis. 17 Yang, Y.P., et al., (2004) have designed and controlled the axial flux BLDC motor for electric vehicles and they have done the multi objective optimal design and analysis. The resulting axial-flux permanent-magnet motor has high torque-to-weight ratio and motor efficiency and is suitable for direct-driven wheel applications. Because the disk-type wheel motor is built into the hub of the wheel, no transmission gears or mechanical differentials are necessary and overall efficiency is thereby increased and weight is reduced. Caricchi, F., et al., (2004) have implemented experimental study on reducing cogging torque and no-load power loss in Axial-Flux Permanent Magnet Motors (AFPM) with slotted winding. The AFPM topology is suited for direct-drive applications, due to its enhanced flux-weakening capability. AFPMs having slotted windings are the most promising candidates for use in wheel-motor drives. Based on the above, this paper deals with an experimental study devoted to investigate a number of technical solutions to be used in AFPMs having slotted windings in order to achieve substantial reduction of both cogging torque and no-load power loss in the motor. Aydin, M., et al., (2006) have verified the torque quality and comparison of internal and external rotor axial flux surface-magnet disc motors. Pulsating torque components of permanent magnet motors and pulsating torque minimization techniques are discussed for axial flux surface-magnet disc-type PM motors. The pulsating torque analysis describing general instantaneous electromagnetic torque equation and torque ripple factor is briefly provided in order to analyze torque ripple component. Breton et al., (2000) studied and presented the influence of motor symmetry on reduction of cogging torque in PMBLDC motors. They have used two methods to reduce cogging torque, both based on the analysis of the rotational symmetry in a PMBLDC motor. The first one seeks to lower the symmetry in the flux of a conventional motor with asymmetrical magnet distribution. The second one uses auxiliary slots to increase the frequency of cogging. Analytical calculations have been made to predict the harmonic spectra of the motors. Numerical calculations by the finite-element method 18 have been carried out. The results support the analytical conclusions. The frequency of the torque pulsation is increased, as predicted. Nicola Bianchi and Silverio Bolognani (2000) have implemented the design techniques for reducing the cogging torque in surface-mounted PM motors. Several techniques are adapted in designing surface-mounted permanent-magnet motors in order to reduce the cogging torque. This paper describes various classical and innovative techniques, giving a theoretical justification for each one of them. A simple original motor of the cogging torque mechanism and a Fourier analysis are introduced. As a result, it is highlighted that some techniques are not always utilizable, and some of them may even be deprecatory when not used correctly. In addition, effects of cogging torque elimination on back electromotive force are discussed. Hansel man, D.C., (1997) have presented the effect of skew, pole count and slot count on BLDC motor radial force, cogging torque and back EMF. Permanent magnet brushless motors are increasingly being used in high performance applications. In many of these applications, the acoustic noise and torque ripple characteristics of the motor are of primary concern. Because of this, it is important to understand the influence of the motor geometrical parameters of skew amount, pole count and slot count on the resulting motor characteristics of radial force, cogging torque and back EMF. Hwang, C.C., and Wu, S.S., (1998) have implemented reduction of cogging torque in spindle motors for CD-ROM drive. The effects of the slot and pole number combination and optimal choice of the width ratio of armature teeth to magnet pole are investigated. A finite element method based on a combination of electromagnetic field and circuit equations for magnetic field motoring and torque prediction is presented. Results show that increasing the number of the least common multiple of slot and pole gives rise to decrease the level of cogging torque. To obtain smaller amplitude of the cogging torque, it is also necessary to choose the proper width ratio of armature teeth to magnet pole. Ki-jinHua et al., (2000) have designed the optimal core shape design for cogging torque reduction of BLDC motor using genetic algorithm. In this paper, some core 19 shapes that reduce cogging torque are found by using the reluctance network method (RNM) for magnetic field analysis and genetic algorithms (GAs) for optimization. The outer rotor type BLDC motor for the DVD ROM driving system is optimized as a sample motor. Tae Kyung Chungand Suk Ki Kim (1997) have implemented the optimal pole shape design for the reduction of cogging torque of brushless DC motor using evolution strategy. Maxwell stress tensor for torque calculation and an evolution strategy for the optimal design process to determine the slot size are used. Experimental verification shows that the proposed algorithm reduces the level of mechanical vibration and noise substantially. In this thesis, new design techniques are proposed to reduce the cogging torque in PMBLDC motor. The performances of the proposed method are compared with the existing methods in the literature. It is shown that the proposed methods give enhanced performance in reducing the cogging torque. 1.12 OBJECTIVES AND CONTRIBUTIONS Brushless DC motor (BLDC) is a motor that develops maximum torque when stationary and have linearly decreasing torque with increasing speed. Limitations of brushed DC motors are low efficiency, poor performance, high wear and tear, less rugged, more complex and expensive control electronics. The BLDC motor has permanent magnets, which eliminate most of the drawbacks mentioned above. In this BLDC motor the cogging torque occurs, due to interaction between permanent magnet and stator slots of the motor. In order to reduce this cogging torque, many researchers have reported methods based on surface mounted magnets, skewing of PMs, Isodiametric magnetic poles, bifurcation, dummy slots and other slot modifications. In this thesis, new methods have been developed such as: Semi-circled magnetic poles, Uclamped magnetic poles, Grooving in rotor PMs and T-shaped bifurcation in stator slots. The performances of proposed methods are evaluated using CAD software and FEA method and compared with the latest techniques reported in the literature. From the 20 results it is found that all the four methods have shown considerable performance improvement in the existing methods of reducing the cogging torque in BLDC motors. 1.13 ORGANISATION OF THESIS Chapter-2 deals with the proposed techniques using the reshaping of magnetic poles namely Semi-circled and U-clamped magnetic poles, which are derived from the existing Iso-diametric magnetic poles. Chapter-3 proposes the techniques using Modified Symmetrical and Asymmetrical and Grooving in magnetic pole designs. Chapter-4 discusses the existing slot modification techniques such as Single, Dual Bifurcations and Reduced Stator Slot Width. The performances of the existing methods have been compared in reducing the cogging torque in BLDC motors. Chapter-5 gives the detailed derivation of T-shaped bifurcation method of stator teeth and the superiority of this method is highlighted. Chapter-6 concludes giving the salient points of the research carried out in this thesis.