Numerical simulation of fatigue failure in polymer glasses
advertisement

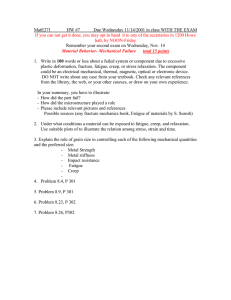
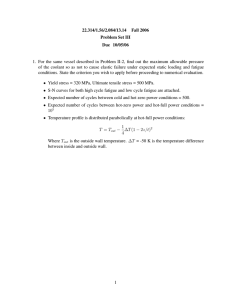
Numerical simulation of fatigue failure in polymer glasses D. de Kanter MT04.28 March 2004 TU/e Internship Report March 2004 Coaches: ir. R.P.M. Janssen dr.ir. L.E. Govaert Eindhoven University of Technology Department of Mechanical Engineering Material Technology group Abstract This study focuses on the ability of the altered Leonov-model as suggested by Klompen [1] to predict time to failure for creep and fatigue. The model that was altered to describe the eects of softening and aging, will not be used to its full potential. The assumption is made that the eects of aging are to be neglected at the timescales investigated. The model is tested on two, dierent numerical methods and for two types of polycarbonate. The tests performed were tests on creep and fatigue. The fatigue was applied by a sawtooth shaped dynamic stress signal on the polycarbonate. The time to failure was dened as the moment of necking or brittle rupture of the material. The amplitude of the dynamic stress signal was varied to determine inuence of the amplitude on the time of failure. The second part of the study introduces an acceleration factor based on the simplications of the model as suggested in this study. The acceleration factor is the analytical contribution of the dynamic stress in the total stress signal. The acceleration factor is used to predict the time of failure for fatigue based on the time of failure for creep. Correspondence between the numerical simulations and experiments was achieved for creep. The fatigue predictions did not appear as accurate as the predictions for creep. The acceleration factor proved to accurately predict the numerically simulated times of failure for fatigue. The eects of aging are not to be assumed negligible in case of fatigue. Aging plays an important role in the explination for the dierences between the experiments and the numerical simulations. i Contents Introduction 1 1 3 Materials and methods 1.1 Materials . . . . . . . . . . . . 1.1.1 Specimen standards . . 1.1.2 Material properties . . . 1.2 Experimental setup . . . . . . . 1.2.1 Tensile tests . . . . . . . 1.2.2 Creep and fatigue tests 2 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3 4 4 4 4 Numerical simulation 6 2.1 MARC n Mentat element simulation . . . . . . . . . . . . . . . . . . . . 2.2 Matlab simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3 Acceleration factor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 6 7 Results 9 3.1 Results of the experiments . . . . . . . . . . . . . . . . . . . . . . . . . . 9 3.2 Results of the simulations . . . . . . . . . . . . . . . . . . . . . . . . . . 9 3.3 Experiments and simulations . . . . . . . . . . . . . . . . . . . . . . . . 11 Bibliography A Tensile test results and 17 Da -values 18 B Determination of the plastic strain rate formulation 19 C Analytical solution accumulative plasticity 20 ii Introduction The polymers that are used in productional processes have dierent thermal histories. The thermal history aects the macroscopic behavior of a polymer [1] and to predict the macroscopic behavior of a specic polymer this history must be know. For the prediction of the macroscopic behavior tools have been developed. One tool that is used, is the Leonov model [1] which is capable of relating the thermal history to macroscopic behavior. The correspondence between the numerical methods and tensile, compression and creep tests has been proven by Klompen [1]. Products are made for a variety of purposes. Many of those purposes are applications in which the product endures stresses of statical, but also dynamical form. Dynamic stress can lead to fatigue. During a course project (Appendix ??) the altered model proved to be able to predict time to failure for creep in polycarbonate. In this study attention is paid to the use of this model under fatigue conditions. The model is used to predict the failure of polycarbonate that is subjected to a static stress combined with a sawtooth shaped dynamic stress. The inuence of the amplitude of the dynamic stress on the time of failure compared to creep, is discussed. A simplied method of predicting fatigue rupture is introduced. The simulations are veried with experiments. The Leonov model In the Leonov model as suggested by Klompen[1] a state parameter to describe the thermal history is introduced. The state parameter is the dierence between the present state and the rejuvenated state as is shown in Figure 1. In the used model aging is not taken into account. The numerical simulations performed in this study are on base of the denition of the plastic strain rate. By dening an accumulative plastic strain the inuence of the loading over the time can be calculated. The assumption of a maximal allowable strain makes it possible to determine a point of failure. Prior simulations and experiments proved the model to be sucient to predict creep rupture under these failure assumptions (Appendix ??). The derivative of the plastic strain rate is dened by (1). This equation is derived as is depicted in Appendix B. _ pl = 1 exp 2AT s s ! u (p3+) D (1+(s exp( ))s1 ) 2s1 1 a 0 pl 30 (1) In the formulation pl is the accumulated plastic strain at a moment in time. AT ; s0 ; s1 and s2 are tting parameters suggested by Engels [2]. Da is the state parameter as 1 2 CONTENTS Figure 1: Visualization of the state parameter. The state parameter values the dierence between the aged polymer (solid line) and the rejuvenated polymer (dashed line). shown in Appendix A. The strain rate dependency (0 ) and the pressure dependencies () are listed in table 1.1. The other parameters are listed in table 1. The state parameter (Da ) can be determined by the data from a tensile test following the method of calculation shown in Appendix ??. For the numerical simulations the value of the state parameters were determined from the experimental data. A0 s0 s1 s3 Polycarbonate 1012 [s ] 0,965 [ ] 50 [ ] -5 [ ] Table 1: Material properties for polycarbonate for numerical simulations. Obtained from the internal report of Engels [2]. Chapter 1 Materials and methods The validation of numerical simulations was done on base of comparison with experimental data. The experimental data for this study was obtained from tensile, creep and fatigue testing. The data obtained from the tensile tests was used for determining the parameters needed for numerical simulation as will be discussed in Chapter 2. The data obtained from the creep and fatigue tests was used for validation of the numerical simulation results. The experimental obtained data is given in Chapter 3. The choices for the used material, specimen shape and the experimental setups are discussed in this chapter. 1.1 Materials For creep and fatigue rupture experiments use was made of two types of polycarbonate. Polycarbonate was chosen as testing material on the base of prior experiments (Appendix ??). The polycarbonate showed in prior experiments a stable necking or brittle rupture behavior which formed a good indication point for a time of failure due to creep or fatigue. Use was made of Bayer Makrolon and G.E. Lexan 101. The Makrolon specimens were obtained from a provided extruded sheet. The choice for an extruded sheet was made to obtain specimens with only little orientation. The material is assumed to be homogeneous during the experiments. Orientated samples can show dierences in behavior compared to not orientated materials. Due to a undersize in Makrolon during the experiments a shift had to be made to Lexan 101 that was available. The Lexan 101 specimens were injection molded. 1.1.1 Specimen standards Both types of material specimens were shaped following the ISO 527 standard. To obtain this standard, the Makrolon specimens were machined by a milling procedure. The ISO 527 standard showed problems during prior experiments. Investigation of the material with polarized light showed two local concentrations of residual stress in the ISO-norm specimens and the specimens used in prior testing. Local stress areas proved to have been formed during the mechanical interventions on the material that were done for acquiring the ISO-norm shape. The combination of milling and the strong round o in the material standard could be pointed out as the cause of the 3 CHAPTER 1. MATERIALS AND METHODS 4 development of these concentrations of stress. The stresses in the material would not lead to a shift in the data, but only to an induction of placed failure in the broader part of the specimen. Specimens that were obtained after the internship and were formed following the ASTM D638M norm proved to be free of residual stress concentrations. 1.1.2 Material properties The material properties needed for the experiments were obtained from the internal report of Engels [2] and the report of Klompen [1] and are given in Table 1.1. The material properties that indicate the present state of the material were obtained by tensile testing. The determination of the state parameter (Da ) is depicted in the appendices of the course-report in Appendix ??. Apart from the state parameter the rest of the material properties are similar for both types of polycarbonate. E 0 Gr Polycarbonate 2000 [MP a] 0,03 [ ] 0,37 [ ] 0,7 [MP a] 26 [MP a] Table 1.1: Material properties of polycarbonate 1.2 1.2.1 Experimental setup Tensile tests The tensile tests were performed on the servo-hydraulic MTS Elastomer Testing System 810 and 831.10, both with a controlled temperature chamber. The specimens were tested on constant linear strain rates of 10 4 , 10 3 and 10 2 s 1 . The specimens were tested on the temperature of 23; 0o Celsius (0; 1o Celsius). To prevent temperature dierences between the temperature chamber and the specimens, the specimens were acclimatized for 15 minutes in the chamber before testing. The results of the tensile tests have been placed in Appendix A. 1.2.2 Creep and fatigue tests Creep and fatigue rupture tests were performed on both types of materials discussed in the section Materials. Both materials were subjected to a static load and in case of the fatigue measurements the static load was complemented with a dynamic contribution. The tests were performed on the servo-hydraulic MTS Elastomer Testing System 810 and 831.10, both with a controlled temperature chamber. Failure of the polycarbonate due to it is loading was dened as the moment in time on which necking or brittle fracture occurred in the polymer. The fatigue and creep-rupture measurements were done at the same temperature (23o Celsius) as the tensile tests and under the same CHAPTER 1. 5 MATERIALS AND METHODS specimen conditions. The fatigue was formed by a sawtooth shaped stress signal with predened amplitude and frequency as shown in Figure 1.1. The sawtooth shape was chosen because of the analytical possibilities that will be discussed in Chapter 2. The amplitude was varied from 0 MPa (creep) up to 10 MPa. Makrolon was measured at the amplitudes of 4 and 6 MPa. Due to an undersize the series for Makrolon up to 10 MPa in steps of 2 MPa were aborted after 6 MPa. The Lexan 101 was tested at the amplitudes of 5 and 10 MPa. Reproduction of fatigue stress signal 65 Applied static stress [MPa] 60 σd σm 55 50 45 40 0 0.5 1 1.5 Time [s] Figure 1.1: Visualization of the fatigue signal. The state parameter is a parameter indicating the parent state of the aged polymer (solid line) compared to the rejuvenated polymer (dotted line). All measurements have been done with the maximal stress under the value of the yield stress measured by tensile tests on the strain rate of 10 4 s 1 . The frequency was in all experiments 1,0 Hz. This refers to a maximum strain rate at the largest amplitude in the order of 10 2 s 1 . Simulations, with adiabatic conditions, showed that the assumption of no heating up of the specimen was reasonable. Chapter 2 Numerical simulation This chapter will discuss the numerical simulations performed and the simplications that were made. 2.1 MARC n Mentat element simulation For numeric simulations the Leonov model is used in combination with the nite element program Marc n Mentat. By use of the parameters from table 1.1 and 1 a simulation is performed for a tensile bar to compare the numerically estimated parameter ,Da , with the experimental determined Da . Due to simplication of the reality in the model, the measured value of Da has to be adjusted in the numerical simulations to predict the material behavior correctly. From the simulation of a tensile test the value of the state parameter Da for numerical simulations can be determined. For Makrolon the value of Da for numerical simulations was determined at 35,7. For Lexan 101 the Da value was determined at 31,4. Both dierent from the experimental values as shown in Appendix A. Prior numerical simulations were performed with the mesh of a quarter of the specimen bar using its symmetry for modelling the whole specimen. To predict the failure of a material it is not necessary to make a mesh of the full specimen. The failure starts in all elements at the same time in case of a homogenous material with constant dimensions of the modulated specimen. Because failure is based on the accumulative plastic strain in every element apart and in this survey was the only point of interest, the mesh was simplied. Considering the equality of elements, only one element has to be calculated to predict the failure of the whole specimen. The mesh was reduced to a single element with axial, rotational symmetry. Simulations were performed for Lexan 101 for the same conditions as the experiment considered in Chapter1. 2.2 Matlab simulation Interested in the moment of failure the model still knows opportunities for further simplication. Knowing the model to calculate the accumulative plastic strain rate in each nodal point of the single element, reducing the element to a single point should lead to 6 CHAPTER 2. 7 NUMERICAL SIMULATION same results. Reduction of the mesh to a single point makes a nite element program is no longer needed for the calculations. The calculations can now be taken over by a mathematical program like Matlab that was used in this survey. In the Matlab simulation attention is paid to the accumulative plastic strain and the elastic part of the material behavior is neglected. This should lead to a small decrease in the predictions of the time to failure. 2.3 Acceleration factor Not all parts of the used denition play a signicant role. The formulation can be parted into two contributions. The rst part describing the inuence of the stress. The second part describing the evolution of the state parameter. A constant state parameter in the order of 30 would only have a small inuence on the evolution of _ p l for the value of exp Da approaches to 1. For the determination of the acceleration factor the state parameter is neglected. _ pl = 1 2AT exp (p3+) u 30 s2 s1 ! Da (1+(s0 exp(pl ))s1 ) s1 exp (2.1) For the further simplication the assumption is made that aging does not occurs on the time scales investigated. The formulation will therefor reduce to a more workable form. _ pl = 1 2AT exp (p3+) u 30 (2.2) Considering the formulation (2.2) a new parting can be suggested. By parting the applied stress (u ) into a static (m ) and a dynamic contribution (d ), as shown in (2.3), the denition of (2.4) is obtained. This denition shows the contribution of the dynamic stress as an acceleration factor on the statical stress. In the formulation, g (f; t) is the relation describing the fatigue signal as a function of frequency and time. In this survey a sawtooth was used as is shown in Figure 1.1. u = m + d g (f; t) _ pl = 1 2AT exp (p3+) m 30 exp (2.3) g(f;t)(p3+) d 30 (2.4) The introduction of an acceleration factor makes it possible to analytically predict the fatigue measurements after only measuring or numerically simulating creep. The acceleration factor will be formulated as the rate in accumulative plastic strain contribution in a specic time period for fatigue and creep. R _ pl (u ) dtcycle az (m ; d ; f ) = R _ pl (m ) dtcycle = Z _ pl (d ) dtcycle (2.5) In case of creep the acceleration factor will be of the value of 1. In case of an amplitude larger than zero the factor will increase. The combination of (2.4) and (2.5) can yield CHAPTER 2. 8 NUMERICAL SIMULATION Acceleration factors for different signals 3 10 Acceleration factor [−] Sawtooth Block Sinus 2 10 1 10 0 10 0 2 4 6 8 10 12 Amplitude of dynamic stress [MPa] Figure 2.1: The evolution of the acceleration factors for the dierent signals. a denition that describes analytically the contribution of a sawtooth shaped stress signal with dened frequency. The derivation of (2.6) has been depicted in Appendix C. az = 30 2d ( 3 + ) p sinh (p3+) d 30 (2.6) The acceleration factor for a sawtooth shaped signal is now only a function of the pressure dependency , the model parameter and the dynamic stress amplitude d . The formulation of the acceleration factor gives the opportunity to view the development of the acceleration factor by increasing amplitude of the sawtooth shaped stress signal. A similar analytical formulation can be derived for dierent types of dynamic stress signals. A denition for the contribution of a block-shaped dynamic stress signal is given in Appendix C. Mathematical problems arise for the calculation of an analytical solution for a sinus shaped stress signal. Gaining a good analytical solution for the sinus shape could lead to expressions for every type of dynamic stress by performing a Fourier transformation on the signal and summarize the dierent constitutional sinuses into a acceleration factor. Chapter 3 Results This chapter covers the results obtained from the experiments discussed in Chapter 1 and the numerical simulations in Chapter 2. 3.1 Results of the experiments The Makrolon and Lexan 101 specimens were tested on MTS Elastomer Testing Systems. Makrolon was tested at the amplitudes of 0, 4 and 6 MPa. Lexan 101 was tested at the amplitudes of 0, 5 and 10 MPa. In the Figures 3.1 and 3.2 the time to failure is plotted on a logarithmic scale as function of the applied static stress. The three relations to be seen in both gures correspond to the least square solutions for creep, shifted in the time to nd the best correspondence with the results. In Figure 3.1 Makrolon shows almost parallel relations for creep and fatigue. An increase of the dynamic amplitude proves to result in a decrease in time to failure. In Figure 3.2 for Lexan 101 the same type of shift to decreased time to failure for higher amplitudes. For higher amplitudes the correspondence of the measurements to the least square relation becomes less. Possible eects like aging due to long experimental times and heating of the sample due to high stresses cause the change in slope in the rst order least square solutions. 3.2 Results of the simulations As shown in Chapter 2 numerical simulations can be performed with the use of the nite element program MARC n Mentat. To illustrate Lexan 101 has been simulated in MARC n Mentat as shown in Figure 3.3. Again, one can recognize a decrease of time of failure for higher amplitude. In Chapter 2 the assumption was made that the mesh could be decreased to a single point. The comparison of the simulations for one point done in Matlab and the simulations done for a single element in MARC n Mentat show a small but constant gap between the results shown in Figure 3.4. The slopes of the relations equal each other. The gap between the results of Matlab and MARC n Mentat is on every spot a factor of the order 2. An explanation can be found in the elasticity of the material that has not been taken into account in the Matlab simulation. A second reason that could have led to this dierence is the method of programming of the model in MARC n Mentat. 9 CHAPTER 3. 10 RESULTS 65 Fatigue measurements on polycarbonate (Makrolon) Applied static stress [MPa] 60 55 50 45 40 1 10 Creep Fatigue 4 MPa Fatigue 6 MPa 2 10 3 10 Time to failure [s] 4 10 5 10 Figure 3.1: Measurements on Makrolon. The least square method is applied to obtain a rst order relation (dotted line) 65 Fatigue measurements on polycarbonate (Lexan 101) Applied static stress [MPa] 60 55 50 45 40 1 10 Creep Fatigue 5 MPa Fatigue 10 MPa 2 10 3 10 Time to failure [s] 4 10 5 10 Figure 3.2: Measurements on Lexan 101. The least square method is applied to obtain a rst order relation (dotted line) CHAPTER 3. 11 RESULTS 65 Fatigue simulations in MARC \ Mentat (Lexan 101) Applied static stress [MPa] 60 55 50 45 40 1 10 Creep Fatigue 5 MPa Fatigue 10 MPa 2 10 3 10 Time to failure [s] 4 10 Figure 3.3: Fatigue simulations of Lexan 101 in MARC ment of the results is shown with the dotted line. 5 10 n Mentat. The align- MARC n Mentat makes use of a minimal plastic strain value to take it into account as plastic strain. On small time steps this can lead to the ignorance of the plastic strain because of a to small value. Matlab on the other hand takes every value of the plastic strain into account and will therefor nd an earlier time of failure. Despite the small dierence, Matlab is showing the same acceleration factors as the MARC n Mentat simulations. This is shown in Figure 3.5. For determination of the acceleration factors Matlab is as adequate in the solutions for predicting fatigue as MARC n Mentat. A last simplication was made by retrieving an analytically derived acceleration factor for the prediction of the contribution of the dynamic stress signal on creep simulations. Comparing the analytical derived acceleration factors with the acceleration factors that can be derived from the numerical simulations (Figure 3.5 and Figure 3.6), the analytical acceleration factors match the numerically found acceleration factors. The analytical solution is only just below the factors obtained from the numerical simulations. The dierence can be explained with the neglecting of the strain hardening in the analytical result. 3.3 Experiments and simulations Making a comparison between the experimental and numerical simulation data as shown from Figure 3.7 till Figure 3.9, a conclusion can be drawn that the two do not yet correspond correctly. It's to be seen that with this model the creep rupture is predicted correctly, but the acceleration factors calculated are lower than the acceleration factors from numerical simulations and the analytical prediction. A remark must be made regarding dierence in evolution of the acceleration factor for Makrolon CHAPTER 3. 12 RESULTS Fatigue analytically predicted and numerically simulated (Lexan 101) 65 Creep Fatigue 5 MPa Fatigue 10 MPa Applied static stress [MPa] 60 55 50 45 40 1 10 2 10 3 10 4 10 5 10 Time to failure [s] Figure 3.4: Fatigue simulations of Lexan 101 in Matlab (points) and MARC n Mentat (dotted line) compared to Lexan 101. A possible explanation for the dierence is the too simplistical model. Discarding aging leads to a decrease in time to failure as is also the case between the numerical simulations and the experimental measurements. CHAPTER 3. 13 RESULTS Fatigue analytically predicted and numerically simulated (Lexan 101) 65 Creep Fatigue 5 MPa Fatigue 10 MPa Applied static stress [MPa] 60 55 50 45 40 1 10 2 3 10 4 10 5 10 Time to failure [s] 10 Figure 3.5: Comparison of the analytical solution for the acceleration factors (dashed line) and the factors obtained from obtained from MARC n Mentat simulations (symbols). Acceleration factors from simulations 3 10 Acceleration factor [−] Analytical Makrolon Lexan 101 2 10 1 10 0 10 0 2 4 6 8 10 12 Amplitude of dynamic stress [MPa] Figure 3.6: Comparison of the analytical solution for the acceleration factors (line) and the factors obtained from obtained from both numerical simulations (symbols). CHAPTER 3. 14 RESULTS 65 Fatigue experiments and simulations (Lexan 101) Applied static stress [MPa] 60 55 50 45 40 1 10 Creep Fatigue 5 MPa Fatigue 10 MPa 2 10 3 10 Time to failure [s] 4 10 5 10 Figure 3.7: The results of the experiments (symbols) and the numerical simulations for Lexan 101 (dashed lines). The simulations for creep performed in Matlab and the fatigue predicted with the analytical acceleration factors. 65 Fatigue experiments and simulations (Makrolon) Applied static stress [MPa] 60 55 50 45 40 1 10 Creep Fatigue 4 MPa Fatigue 6 MPa 2 10 3 10 Time to failure [s] 4 10 5 10 Figure 3.8: The results of the experiments (symbols) and the numerical simulations for Makrolon (dashed lines). The simulations for creep performed in Matlab and the fatigue predicted with the analytical acceleration factors. CHAPTER 3. 15 RESULTS Acceleration factors for a sawtooth signal on polycarbonate 3 10 Acceleration factor [−] Analytical Makrolon Lexan 101 2 10 1 10 0 10 0 2 4 6 8 10 12 Amplitude of dynamic stress [MPa] Figure 3.9: The weighted acceleration factors from experiments on Makrolon (diamond) and Lexan 101 (circle) compared to the analytical prediction (line). Conclusion The study is performed to verify whether the Leonov-model was capable of predicting time of failure for fatigue type of loading. As Klompen [1] already showed, failure due to creep loading proved to be predicted accurately in this study. The comparison between creep and fatigue loading led to good correspondence between the two numerical methods. The results of Matlab have the advantage of been calculated in less time due to a more simplied representation of the material by single point. The analytical acceleration factor that was derived, showed the same predictions for fatigue loading on base of the creep predictions, as both the numerical simulation methods. The advantages of the acceleration factor is the short time of determination and the possibility to dene an acceleration factor for every type of fatigue loading. A second advantage is that fatigue simulations are no longer necessary as the acceleration factor can predict the results on base from the creep simulations. The prediction on the other hand of time to failure for fatigue loading is not as accurate as for creep loading. A too simplistical model can be a reason to declare the dierence between simulation and experiment. Eects like aging can not be neglected without further determination of its inuence on fatigue. 16 Bibliography [1] Klompen, E.T.J., van Haag, C. and Engels, T.A.P. 2003. Elasto-viscoplastic modelling of nite strain deformation behavior of glassy polymers; Incorporating aging kinetics. In:To be submitted. Eindhoven. [2] Engels, T.A.P. 2003. An investigation into the predictability of long-term ductile failure of glassy polymers. In: Internal Report (MT03.18) Eindhoven. 17 Appendix A Tensile test results and Da-values Material Strain rate [s 1] Da Experimental [-] Da Numerical [-] Makrolon 10 2 26.5 31.4 Makrolon 10 3 26.5 31.4 4 Makrolon 10 26.5 31.4 Lexan 101 10 2 31 35.7 3 Lexan 101 10 31 35.7 Lexan 101 10 4 31 35.7 Table A.1: Experimentally and numerically derived state parameters Material Amplitude of dynamic stress Acceleration factor Makrolon 0 1 Makrolon 4 2.6 Makrolon 6 7.4 0 1 Lexan 101 Lexan 101 5 2.7 Lexan 101 10 30.3 Table A.2: Experimentally derived acceleration factors 18 Appendix B Determination of the plastic strain rate formulation In his report, Klompen [1] writes the viscosity as a function of the equivalent stress ( ), the state parameter (Da ) and the pressure (p). p H +D ( ; D; p) = A0 0 exp( RT ) exp 0 The plastic strain rate is dened by: 0 sinh 0 (B.1) (B.2) 2 In the value of A0 depends on the temperature and is therefor rewritten to the value AT . AT is taken constant in the simulations. H RT ref (B.3) A0;ref = A0 exp RH T1 T 1 ref AT = A0;ref exp (B.4) _ pl = Combining all equations into equation B.1 leads to: p 1 _ pl = exp 0 D(p l) sinh 2 AT 0 (B.5) In this function the pressure (p) is adjusted to uniaxial strain as was used in this study. 1 p = u (B.6) 3 For simplication of the equation use was made of a mathematical simplication following shown rule. 1 sinh = exp (B.7) 0 2 0 The softening as suggested by Klompen [1] can be added to the equation. s2 s1 D(p l) = Da (1 + (s0 exp(pl ))s1 ) s1 (B.8) Inserting all equations in B.5 leads to the denition of the plastic strain rate as it will be used in this study. s s ! u (p3+) Da (1+(s exp( ))s1 ) 2s1 1 0 pl 30 1 _ pl = exp (B.9) 2AT 19 Appendix C Analytical solution accumulative plasticity This appendix discusses the derivation of the acceleration factor for a sawtooth shaped stress signal. Only the steps that are crucial for this derivation are written down in this appendix. The starting point of this derivation is the formulation for the derivative of the plastic strain rate. The softening is considered negligible. _ pl = 1 2 AT exp p u ( 3 + ) 30 (C.1) The rst step is dividing the stress u in a static stress m and a dynamic stress contribution d . u = m + d g (f; t) (C.2) In this equation g(f; t) represents the function describing the dynamic stress signal and is a function of time and frequency. Inserting C.2 into C.1 leads to: (m + d g(f; t)) _ pl = exp 2AT 30 1 p 3+ ! (C.3) The static stress contribution is invariant of time and can therefor be taken outside the integral. ! p m (p3+) Zt2 3+ g(f;t) 30 1 d 3 0 exp dt (C.4) pl = exp 2 AT t1 In the equation a notation is introduced that describes the contribution of the static stress, _ pl (m ). ! m (p3+) 30 1 _ pl (m ) = exp (C.5) 2 AT 20 APPENDIX C. ANALYTICAL SOLUTION ACCUMULATIVE PLASTICITY Equation C.4 can now be rewritten. pl = _ pl (m ) Zt2 p 33+ 0 exp d g(f;t) (C.6) dt t1 The new equation clearly shows the contribution of the dynamic stress as a factor on the static contribution. This division makes it possible to dene a acceleration factor. A acceleration factor (az ) can be dened as equation C.7. R _ pl (u ) dtcycle az (m ; d ; f ) = R = _ pl (m ) dtcycle Z _ pl (d ) dtcycle (C.7) To calculate the integral over the time of one period of the sawtooth shaped stress signal, the period is divided in three time parts. The integral over the whole period will be the same as the sum of the three parts. Denition of the stress signal (u ) u = m + 4fd t u = m + 2d 4fd t u = m 4d + 4fd t Time interval 0 t < 41f 3 1 4f t < 4f 3 1 4f t < f For every time interval a contribution can now be calculated. For the time interval 0 t < 41f the next equations can be obtained. 1 p Z4f 33+ 0 4fd t dt pl = _ pl (m ) exp (C.8) 0 Inserting the time boarders. pl = _ pl (m ) p 30 3 + 4f d ! p 33+ 0 exp d ! exp 0 In the same way a denition can be written for 41f t < 43f . ! p p d 33+ 2d 33+ 3 0 0 0 p pl = _ pl (m ) exp exp exp 3 + 4f d To nish with the last time period p 4d 33+ 0 pl = _ pl (m ) exp 3 4f t < f1 . p 30 3 + 4f d ! exp 4d p 33+ 0 (C.9) 3d 33+ 0 ! (C.10) exp p 3d p 33+ 0 ! (C.11) 21 APPENDIX C. ANALYTICAL SOLUTION ACCUMULATIVE PLASTICITY The three formulations can be summarized to one equation. pl = _ pl (m ) p30 2 d ( 3 + ) exp d (p3+) 30 ! 1 (C.12) The denition C.7 is used to dene a acceleration factor for the sawtooth shaped stress signal. The analytical solution for the acceleration factor is now only a function of the pressure dependency value (), a model parameter ( ) and the amplitude of the dynamic stress (d ). p ! d ( 3+) d (p3+) 30 3 3 0 0 p az = exp exp (C.13) 2d ( 3 + ) This equation can be simplied by using a mathematical approximation of the exponential parts. p d ( 3+) 30 3 0 p az = sinh (C.14) 2 d ( 3 + ) The same procedure can be followed to obtain a acceleration factor for a block-shape. The analytical solution of the acceleration factor for a block shaped stress signal can then be written as: p ! d ( 3+) d (p3+) 1 3 3 0 0 az = exp + exp (C.15) 2 The solution for a denition of a sinus shaped stress signal is only to be determined by a numerical approximation. Dierences in the evolution of the acceleration factors for the dierent signals is shown in Figure 2.1. 22