Estimation of subsample time delay differences in narrowbanded
advertisement

Estimation of subsample time delay differences in
narrowbanded ultrasonic echoes using the Hilbert
transform correlation
Anders Grennberg and Magnus Sandell
December 1993
Abstract
In many areas the time delay of arrival (TDOA) is desired. Conventional
estimators usually have the property of breaking down for low SNR. In the
case of narrowbanded signals we propose a fast and simple method to estimate
the small time delays. The method is shown to have the same accuracy as
conventional methods for small delays and high SNR while it performs better
for low SNR. It is based on using the Hilbert transform in correlation between
two signals. Apart from using it for better resolution in TDOA, it may also be
used in applications with narrowbanded signals where the measurements are
repeatable, such as ultrasonic imaging and ECG. In ultrasonic applications,
due to fluctuations in the insonified media, a small random time shift may be
present causing the signals to be misaligned in time. Averaging signals under
these conditions will result in a distortion of the signal shape. We propose
an averaging method to avoid this and to accomplish a higher SNR without
the distortion. Simulations and experiments from ultrasonic applications are
presented.
1
Introduction
The time delay of arrival (TDOA) is required in many areas, e.g. ultrasonic imaging
[16]. Estimators of the TDOA are designed in different ways [3, 5, 7, 10, 17], but they
have a few things in common. Usually they have an SNR threshold under which they
perform substantially less well [18]. For correlator based estimators this is due to peak
ambiguity, i.e. the possibility of selecting the wrong peak of the correlation. These
estimators also need some kind of interpolation to obtain subsample resolution, e.g. a
parabolic fit [4, 14]. In [11], a comparison of different methods is made. Under the
assumption that the signals are narrowbanded and that the time delays are small, we
propose a novel method to estimate the TDOA. This method is shown to be fast and
simple. Apart from the increased resolution in TDOA, it can be used for other purposes.
One such application is the problem of averaging. In areas where the measurements are
repeatable, such as ultrasonic imaging, nondestructive evaluation (NDE) and ECG, the
process of averaging can be used to improve the SNR. If the useful part of the signal
is the same for all measurements, it will remain the same after the averaging while the
disturbances (e.g. noise and artifacts) will be attenuated since they occur randomly in
each separate measurement. However, if the useful part of the signal has a small random
time shift due to physical reasons or inaccuracies in the measurement equipment, the
averaging will distort this signal. This phenomenon can appear e.g. in ultrasonic imaging
when the insonified medium is not homogeneous but varies slightly with time. Using the
above mentioned method we can estimate these small random time shifts and design an
averaging algorithm that time aligns (i.e. causes the useful part of the signals to have
the same position in time) so that very little signal shape distortion occurs when the
averaging is carried out. Another area of application is in ultrasonic pulse-echo imaging.
Airborne ultrasound suffers from inhomogeneities in the medium such as temperature
gradients and air turbulence [8]. These effects can be reduced if a reference reflector,
such as a line reflector across the ultrasonic field, is placed at a fixed distance from the
transducer [9]. The main echo from the surface will not be disturbed in any major way
and changes in the medium can be estimated since the distance to the reference reflector
is known. Since these changes can be expected to be small and the reference echo, due to
its limited size of the reflector, have a poor SNR, the algorithm described in this paper
is very useful.
1
2
Derivation of the estimator
We model all received echoes as having the same signal shape and only differing in the
arrival time. Thus, using r(t) as a reference echo we find that the received echo is
s(t) = r(t − θ)
(1)
where the time delay θ is considered to be an unknown deterministic parameter. In many
conventional time delay estimators [3, 5] the cross correlation between the reference echo
r(t) and the received echo s(t) is considered. However, using the fact that the echo is
narrowbanded and the time delay θ is assumed to be small, an alternative approach is to
use the correlation with the Hilbert transform of r(t). The Hilbert transform is defined
as [2]
1 Z ∞ r(x)
ř(t) = H{r(t)} =
dx = h(t) ∗ r(t)
(2)
π −∞ x − t
where the integral is a Cauchy Principal Value (CPV) and ∗ denotes convolution. The
1
Hilbert kernel is denoted by h(t) = − πt
. We observe that if r(t) ∈ L2 (−∞, ∞) then it
2
follows that ř(t) ∈ L (−∞, ∞), see [6]. Now, consider the cross correlation between s(t)
and ř(t) for time lag zero, i.e. the standard scalar product between s(t) and ř(t) and use
Parseval’s identity:
Z
Z
∞
−∞
s(t)ř(t)dt = < s, ř > =
=
Z
∞
−∞
∞
−∞
r(t − θ) [h(t) ∗ r(t)] dt
e−j2πf θ R(f )H(f )R(f )df
Z
=
∞
−∞
ej2πf θ H(f )|R(f )|2 df
(3)
If the ultrasonic echoes are narrowbanded, i.e. their energy is concentrated in frequency
intervals of size B around ±f0 , we may formulate (3) as
Z
< s, ř >≈
≈ −je
=
−f0 +B/2
−f0 −B/2
−j2πf0 θ
Z
j2πf θ
e
H(f )|R(f )| df +
−f0 +B/2
−f0 −B/2
Z
2
|R(f )| df + je
2
f0 +B/2
f0 −B/2
j2πf0 θ
Z
ej2πf θ H(f )|R(f )|2 df
f0 +B/2
f0 −B/2
|R(f )|2 df
´
Er ³ −j2πf0 θ
j −e
+ ej2πf0 θ = −Er sin 2πf0 θ = −Er sin ω0 θ
2
(4)
where Er is the energy of r(t) and ω0 = 2πf0 . We have used the fact that H(f ), the
Fourier transform of the Hilbert kernel, is j sgn(f ), see [2], and assumed the exponentional function to be constant over the integration interval. This gives us
R
− ∞ s(t)ř(t)dt
− < s, ř >
sin ω0 θ ≈
= R−∞
∞
2
E
−∞ r (t)dt
(5)
This estimator can be expected to work well only for narrowbanded signals and small
time delays θ. The assumption that ej2πf θ is constant over the integration interval will not
2
be valid otherwise. However, to solve this problem we may design a ”hybrid” algorithm
consisting of two parts. The first is a rough estimate of the time delay which is robust
but not very accurate. Its resolution is typically a few samples which is sufficient since
the ”fine tuning” can be done with the second part of the algorithm, i.e. our proposed
method. As we work with sampled signals, we may give the discrete version of (5).
Assuming we have N samples and denoting these samples s[n] = s(nTs ), where Ts is the
sample interval, we may approximate the integrals of (5) with sums and yield
Ã
R
∞
− −∞
s(t)ř(t)dt
1
R∞
θ̂ =
sin−1
2
ω0
−∞ r (t)dt
!
Ã
P
−1
−Ts N
1
k=0 s[k]ř[k]
≈
arcsin
P −1 2
ω0
Ts N
k=0 r [k]
!
(6)
Using vectors and denoting them s = [s[0] s[1] . . . s[N − 1]]T , ř = [ř[0] ř[1] . . . ř[N − 1]]T
and r = [r[0] r[1] . . . r[N − 1]]T , we have
Ã
1
sT ř
θ̂ =
arcsin − T
ω0
r r
!
(7)
Since r(t) is a reference echo, we may calculate −ř/rT r = b one time for all and arrive
at the fast and simple time delay estimator
θ̂ =
³
´
1
arcsin sT b
ω0
(8)
If the angular centre frequency ω0 is not known, it may be estimated by ”inducing our
own time delay”. Introducing a constructed signal x(t) = r(t − Ts ) we have θ = Ts . In
vector notation this is equal to x = [0 r]. For this known θ we can rewrite (7) to estimate
ω0
³
´
1
ωˆ0 =
arcsin [0 r]T [b 0]
(9)
Ts
3
3
3.1
Performance of the estimator
The influence of bandwidth
In the derivation of the estimator we assumed an infinitesimally small bandwidth. This
is of course not the case for an arbitrary narrowbanded signal. To analyze the influence
of bandwidth we assume that the signal r(t) has the following Fourier transform:
( q
R(f ) =
|f ± f0 | < B
otherwise
Er
2B
0
(10)
This signal has energy Er and bandwidth B. In Appendix B we show that the bandwidth
introduces a bias in the form of an multiplicative term:
sin ω0 θ̂ =
−
R∞
s(t)ř(t)dt
= sinc(Bθ) sin ω0 θ
2
−∞ r (t)dt
R−∞
∞
(11)
We see that in order to keep this bias low, the product of bandwidth and time-delay
must be small. This gives us an idea of how large θ this estimator can be assumed to
work well for.
3.2
Noise error
Assume that r(t) and s(t) are corrupted by independent additive white Gaussian noise
with power spectral density of N0 /2. Since both r(t) and s(t) are bandlimited we can also
assume that noise has a limited bandwidth. If this is not the case, the received signals
can always be lowpass filtered without any loss of information. Note that the Hilbert
transform of a white Gaussian process n(t) is also white and Gaussian:
Sň (f ) = Sn (f )|H(f )|2 = Sn (f )
(12)
Here we let Sn (f ) denote the power spectral density of the stochastic process n(t), i.e.
the Fourier transform of the autocorrelation function Rn (τ ). If we include the noise in
(5) we get
à RT
!
1
− 0 (s(t) + n(t)) (ř(t) + ň0 (t)) dt
arcsin
(13)
θ̂ =
RT
2
ω0
0 (r(t) + n0 (t)) dt
where the reference echo is r(t) + n0 (t) and the received echo s(t) + n(t). Since we are
interested in θ and we work with discrete data, i.e. N samples of respective signal, we
approximate the integrals in (13) with sums:
Ã
1
−Ts
θ̂ =
arcsin
ω0
PN −1
(s[k] + n[k])(ř[k] + ň0 [k])
PN −1
Ts k=0 (r[k] + n0 [k])2
k=0
!
µ
B
1
=
arcsin
ω0
A
¶
(14)
The sampled white Gaussian processes n[k] and n0 [k] have the variance σ 2 = N0 Fs , where
Fs is the sample frequency, see Appendix A. Since this estimator is highly nonlinear, it is
4
difficult to analyze. However, since the mean is much larger than the standard deviation
for the denominator, we may linearize the estimator in (14), see Appendix C, to obtain:
Ã
1
µB
E{θ̂} ≈
arcsin
ω0
µA
³
!
Ã
´2
Ã
1
µB
µ2A Var{B} + µ2B Var{A}
E{ θ̂ − θ } ≈
+
arcsin
2
2
2
2
µA (µA − µB )ω0
ω0
µA
!
!2
−θ
(15)
where
µA
µB
Var{A}
Var{B}
The mean of the estimate is
=
=
=
=
µ
E{A} = Er + N Ts σ 2
E{B} = Er sin ω0 θ
4Er Ts σ 2 + 2N Ts2 σ 4
2Er Ts σ 2 + N Ts2 σ 4
Er sin ω0
1
arcsin
E{θ̂} =
ω0
Er + N Ts σ 2
¶
µ
SN R
1
=
arcsin
sin ω0 θ
ω0
SN R + 1
(16)
¶
(17)
where we define
Er
(18)
N Ts σ 2
This is not the standard definition of the SNR but rather the relationship between the
energies of the signal and the noise. As we see from (17), the estimator can be expected
to be asymptotically unbiased for large SNR but contain a bias for small SNR. As for
the error variance, it can be shown from (15) that
SN R =
1
+ θ2
N ω02
lim
E{(θ̂ − θ)2 } =
lim
E{(θ̂ − θ)2 } = 0
SN R→−∞ dB
SN R→∞ dB
(19)
From this we see that the standard deviation of the error for very low SNR will be
approximately equal to the delay θ. Generally, for an arbitrary SNR, we will have an
increase in error variance for larger θ.
3.3
Numerical simulations
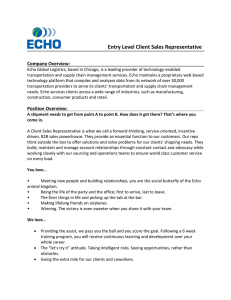
In order to verify the performance given by the previous section we simulated (7) numerically by using a synthetic echo in the form of
r(t) = Ate−at cos ω0 t
2
(20)
with the parameters A = 7 · 105 , a = 1010 , ω0 = 2π106 and the sample frequency
fs = 20 MHz which corresponds to our equipment. The synthetic echo is shown in Fig.
5
Amplitude [V]
3
2
1
0
-1
-2
-3
0
5
10
15
20
25
30
35
40
45
50
Time [ms]
Figure 1: Synthetic echo used in simulations.
1. Since we used fs = 20 MHz and the centre frequency f0 = 1 MHz, we have 20 samples
per period in the echo. For each value of the SNR, we simulated 1000 measurements
and calculated the mean of the estimator (7). We added noise to both r(t) and s(t).
The simplified expression of the mean and variance (15) was compared to the mean and
variance of the simulation. In Fig. 2 and 3, we show these curves as a function of SNR
with θ = Ts . As we can see, the simplified expression (15) agrees very well with the
simulations. The curves are in fact hard to tell apart. To see how the error variance
varies with θ, we chose to calculate the performance of the estimator for three different
values of the SNR: -10 dB, 10 dB and 30 dB. The error variance of the estimator is
shown as a function of θ in Fig. 4. As we can see, the larger θ is, the larger the error
variance becomes. This phenomenon stems from the fact that for large θ, the bandwidth
of r(t) introduces a bias which can not be neglected. As a reference, we have also
simulated a conventional time delay estimator. This type of estimator correlates the
received echo with the reference echo and looks for the maximum of the cross correlation.
Its performance has been discussed in [7]. In order to obtain subsample resolution, a
simple interpolation technique was used. A second order polynomial was fitted to the
maximum correlation and its preceding and following point. The time lag that maximizes
this polynomial was chosen as the subsample time lag that gives maximum correlation.
Why this works is easily seen using (4). If we correlate the received echo s(t) with r(t)
instead of ř(t), the sin ω0 θ-term will be replaced by a cos ω0 θ-term. This implies that the
cross correlation will have the shape of a cosine in the neighbourhood of its maximum. For
small x we can make the approximation cos x ≈ 1 + x2 /2, i.e. a second order polynomial,
which explains why the interpolation works so well. In Fig. 5 we have compared this
6
^
E {q} [samples]
1
0.8
0.6
0.4
0.2
0
-30
-20
-10
0
10
20
30
40
50
SNR [dB]
Figure 2: Simulated (solid) and theoretical (dashed) mean of the estimator for θ = Ts .
Note that the two curves are difficult to distinguish between.
estimator with ours for the time delay corresponding to a sample interval (θ = Ts ). The
reason for the increase in the error variance for the conventional estimator is that it is
based on peak detection [18]. For small SNR, the possibility of detecting the wrong peak
increases. This is especially true for narrowbanded signals, which have a small difference
in amplitude for the peaks in the autocorrelation. If we let the conventional estimator
know that the time delay is small, i.e. it is not necessary to perform a global search of
the maximum, this phenomenon disappears and the performance will be approximately
the same as for our method. However, the complexity of the estimator is greater since
the cross correlation for several time lags has to be calculated and an interpolation needs
to be done to achieve subsample resolution.
7
^
2
E {(q-q) } [samples2]
10 1
10 0
10 -1
10 -2
10 -3
10 -4
10 -5
10 -6
10 -7
-30
-20
-10
0
10
20
30
40
50
SNR [dB]
Figure 3: Simulated (solid) and theoretical (dashed) error variance of the estimator for
θ = Ts
^
2
E {(q-q) } [samples2]
10 2
SNR = -10 dB
10 1
10 0
SNR = 10 dB
10 -1
10 -2
10 -3
SNR = 30 dB
10 -4
10 -5
0
0.5
1
1.5
2
2.5
3
3.5
4
q [samples]
Figure 4: Simulated error variance of the estimator for different values of the SNR.
8
^
2
E {(q-q) } [samples2]
10 8
10 5
10 2
10 -1
10 -4
10 -7
-30
-20
-10
0
10
20
30
40
50
SNR [dB]
Figure 5: Simulated error variance of the estimator (solid) compared with a conventional
method (dashed) for θ = Ts .
9
4
Application example: Averaging algorithm
Using the estimator of small time delays (7), we can proceed to formulate an averaging
algorithm. This method becomes useful when the echoes have small random time shifts.
These could originate from fluctuations in the insonified medium. In our line of research,
which contains surface profiling by using airbourne ultrasound [16], these fluctuations
take the form of temperature variations and air turbulence. A change in the air temperature of 0.1o C results in a 0.06 m/s change of sound speed [12]. Using our transducer
with a radius of curvature of 45 mm, i.e. a total path length of 90 mm for a surface in
the focal plane, this means a time delay of 45 ns = 0.95Ts in our case, where Ts is the
sample interval. These small random time shifts have to be taken into account when an
averaging process is applied. Otherwise we will introduce a distortion of the signal due
to the misalignment of the echoes. Assume that we want to average over M echoes,
si (t) = r(t − θi ) + ni (t) i = 0 . . . M − 1
(21)
∆
where we define s0 (t) = r(t) + n0 (t). In (21), θi are small independent random time
shifts and ni (t) white Gaussian additive noise which are independent of θi . The first
thing is to estimate the individual time delays between the echoes. This can be done
as described in section 2. We use the first echo s0 (t) as the reference echo. To be
able to average over the M echoes, we need to align the echoes in time. This has been
done by using an interpolation formula, which is approximately an all-pass filter with
linear phase (corresponding to the time delay). Since we have samples of the echoes the
problem is expressed as having si (nTs ) and wanting si (nTs + θi ) = s0 (nTs ). We use the
same notation as before, i.e. the samples are si [n] = si (nTs ). A simple interpolation
method is Lagrange’s formula [1] of the order 2N + 1
f (x + t∆) =
N
X
hk (t)f (x − k∆)
(22)
k=−N
which uses the fact that f (x) is known in the equally spaced points xk = x − k∆. The
weights hk depend on t which is the fraction of the distance ∆ for which we want to find
f . The interpolation (22) can be seen as a filter with taps hk . We can now align si [n]
with s0 [n] by forming s0i [n] = si [n] ∗ h[n] where ∗ denotes convolution. By doing this for
all echoes si [n] we can average over the M echoes:
−1
1 MX
s[n] =
s0i [n]
M i=0
(23)
The averaged echo s[n] will have the same position in time as s0 [n] since this is used as a
reference echo. In order to find an absolute position in time we average over all estimated
time delays
−1
1 MX
θ=
(24)
θ̂i
M i=0
10
This gives us an estimation of the correct position in time of s[n]. To obtain the final
averaged signal we interpolate with the Lagrange interpolation filter with taps hk which
are determined by θ.
11
5
Experiments
Apart from the difficulties of defining signal shape distortion, there are also practical
problems. A noise-less reference echo is usually not available and thus it is difficult
to measure the effect of the signal shape distortion. Instead we chose to get another
quantitative measure of the performance of the algorithm. One area where it can be
used is airborne ultrasound. We used a focused transducer with a radius of curvature of
45 mm, a diameter of 20 mm and a centre frequency of approximately 1.07 MHz which
makes it a strongly focused transducer [13]. It was designed by Hans W. Persson, Lund
Institute of Technology, for the investigation presented in [16], and is acoustically adapted
for air. We applied it to a phantom in the form of a massive brass block with smooth
surfaces. The block was placed perpendicular to the transducer, the position of which
was fixed throughout the whole experiment. We registered 500 echoes which took about
30 seconds with our equipment. These echoes, which should be identical since they were
measured at the same spot, were then investigated. A measured echo is shown in Fig. 6
and the SNR was estimated to be approximately 30 dB.
Amplitude [V]
3
2
1
0
-1
-2
-3
0
5
10
15
20
25
30
35
40
45
50
Time [ms]
Figure 6: Measured ultrasonic echo from the phantom.
12
6
Results
If we plot a cross-section of the registered echoes, i.e. for a fixed value of the time t
we plot how the amplitude varies for the different measurements, we can see how the
misalignment effect can cause problems when we average the echoes. This cross-section
plot is shown in Fig. 7. If the echoes did not have a random time shift, these curves
Amplitude [V]
2.5
t=t1
2
1.5
1
0.5
t=t 2
0
0
50
100
150
200
250
300
350
400
450
500
Measurement nr
Figure 7: Cross-section of the measured echoes for two values of t. The uppermost curve
corresponds to t = t1 which is a peak in the echo and the lowermost to t = t2 which is a
zero-crossing. Total time for the 500 measurements was 30 seconds.
would be straight horizontal lines apart from the measurement noise. The uppermost
^
q [samples]
1
0.8
0.6
0.4
0.2
0
0
50
100
150
200
250
300
350
400
450
500
Measurement nr
Figure 8: Estimated time shifts relative to the first echo for the measurements in Fig. 7.
13
curve corresponds to a point in time where the echo has a peak, i.e. small derivative, and
the lowermost to a point in time when the echo has a zero crossing, i.e. large derivative.
Looking at the estimations of the time shifts relative to the first echo, Fig. 8, we can see
that it has the same drift as the cross-section. The magnitude of the derivative of the echo
in Fig. 6 at the zero crossings is estimated to be almost 20 V/µs. From Fig. 8 and Fig. 7
we see that the delay of one sample, i.e. 50 ns, at a zero crossing results in an amplitude
difference of approximately 1 V. If we linearize the echo at the zero crossing we get an
amplitude of 20 V/µs × 50 ns = 1 V. From Fig. 8 we can see that it has a low-frequency
shape which corresponds to the fluctuations in the medium that appear during the total
measurement time of 30 seconds. To see the effects of using our averaging algorithm, we
look at the cross-section variance of s(t) for each point of time, i.e. v(t) = Var{s(t)}.
We compare the variance for the original echoes with the one where we estimated the
individual time shifts and interpolated the echoes in order for them to be time aligned
with the first echo. As we can see in Fig. 9, the alignment is very good. The peaks in
Var{s(t)} [V 2]
0.1
0.08
0.06
0.04
0.02
0
10
12
14
16
18
20
22
24
Time [ms]
Figure 9: Variance of the cross-section before (solid) and after (dashed) time alignment.
variance for the original echoes correspond to points of time where the echoes’ derivative
is large, thus yielding large variations in the cross-section. We can also see in the plot
of the variance after the time alignment that the variance has a constant amplitude and
does not vary with time. The small variations that are still present are mainly due to
additive noise.
14
7
Summary
We have proposed a new method for estimating small time delays in narrowbanded
signals. It is based on correlation with the Hilbert transform of the reference echo instead
of the original echo. The estimator has been shown to be simple, fast and with the
same or better accuracy than conventional methods. This method could be used for
increased resolution in time delay of arrival (TDOA) estimation. We have also proposed
an averaging algorithm which can be used when the individual signals have a small
random time shift between themselves. In this case we can have the advantage of using
the above estimation method to align all signals in time before averaging them. The
mean of the estimated time shifts can also be used to find a better absolute position in
time for the averaged signal. Typical areas of application for these methods are ultrasonic
applications and ECG.
15
Appendix A
Sampled stochastic processes
A continuous-time white noise process n(t) with bandwidth Fs /2 has the autocorrelation
function (acf) rn (τ ) = N20 Fs sinc(Fs τ ), where N0 /2 is the amplitude of the power density
spectrum and sinc(x) = sin(πx)/(πx). If this process is sampled with a frequency of Fs ,
i.e. n[k] = n(k/Fs ) = n(kTs ), the samples will constitute a discrete white noise process:
E{n[k]} = E{n(kTs )} = 0
E{n[k]n[k − m]} = E{n(kTs )n((k − m)Ts )} = rn (mTs ) =
N0 sin πm
N0
Fs sinc(Fs mTs ) =
Fs
2
2
πm
(25)
The last expression will equal zero for all integers m 6= 0. For m = 0, we have E{n[k]2 } =
E{n(kTs )2 } = rn (0) = N0 Fs /2. Thus, n[k] is a white noise process with zero mean and
variance σ 2 = N0 Fs /2.
16
Appendix B
The effect of bandwidth
Assuming that the narrowbanded signal r(t) has the Fourier transform
( q
R(f ) =
|f ± f0 | < B
otherwise
Er
2B
0
(26)
where Er denotes the energy and B the bandwidth, we have, using Parseval’s theorem
and the model s(t) = r(t − θ)
Z
Z
Z
∞
−∞
−f0 +B/2
−f0 −B/2
s(t)ř(t)dt =
−je
j2πf θ
"
j
−∞
e−j2πf θ R(f )jsgn(f )R(f )df =
|R(f )| df +
2
Z
f0 +B/2
f0 −B/2
#
j2πf θ −f0 +B/2
Er e
−j
2B j2πθ
−j
∞
jej2πf θ |R(f )|2 df =
"
Er ej2πf θ
+j
2B j2πθ
−f0 −B/2
#f0 +B/2
=
f0 −B/2
Er −j2πf0 θ
Er j2πf0 θ
e
e
Bsinc(Bθ) + j
Bsinc(Bθ) =
2B
2B
Er
Bsinc(Bθ)2j sin(2πf0 θ) = −Er sinc(Bθ) sin(2πf0 θ)
2B
(27)
Thus we have
−
R∞
s(t)ř(t)dt
Er sinc(Bθ) sin ω0 θ
= sinc(Bθ) sin ω0 θ
=
2
Er
−∞ r (t)dt
R−∞
∞
17
(28)
Appendix C
Linearizing the estimator
In order to linearize the estimator (14) we use the Taylor series of the function
à !
1
x
f (x, y) =
arcsin
ω0
y
=
f (x0 , y0 ) + (x − x0 )
∂f
∂f
|(x,y)=(x0 ,y0 ) +(y − y0 )
|(x,y)=(x0 ,y0 ) + . . . (29)
∂x
∂y
The partial derivatives are
∂f
1
r
=
∂x
ω0
∂f
∂y
=
1
r
ω0
1
1−
1
1−
1
1
1
³ ´2 y = ω √ y 2 − x 2
0
x
y
−x
1 x
1
³ ´2 y 2 = − ω y √ y 2 − x 2
0
x
(30)
y
Introducing εB , which is a zero-mean stochastic variable with variance Var{B}, and
µB = E{B} we can approximate the estimator (14) by putting B = µB + εB and
correspondingly A = µA + εA and use the above linearization at the point (µB , µA )
µ
¶
1
B
arcsin
≈
θ̂ =
ω0
A
Ã
!
µB
1
µB
1
q
arcsin
+ εB q
− εA
ω0
µA
ω0 µ2A − µ2B
ω0 µA µ2A − µ2B
The mean of θ̂ is now found to be
Ã
1
µB
E{θ̂} =
arcsin
ω0
µA
(31)
!
(32)
The error variance is
³
E{ θ̂ − θ
´2
2
Ã
!
1
µB
εB
µB εA
q
} = E
arcsin
−θ+ q
−
=
µA
ω0
ω0 µ2A − µ2B ω0 µA µ2A − µ2B
Ã
Ã
!
!2
Ã
1
µB
arcsin
ω0
µA
Ã
1
µB
arcsin
ω0
µA
−θ
!
+
µ2B Var{A}
Var{B}
+
=
ω02 (µ2A − µ2B ) ω02 µ2A (µ2A − µ2B )
+
µ2A Var{B} + µ2B Var{A}
ω02 µ2A (µ2A − µ2B )
!2
−θ
(33)
if we assume that εA and εB are uncorrelated. The mean of B is found to be
(
E {B} = E −Ts
N
X
)
s[k]ř[k] + s[k]ň0 [k] + n[k]ř[k] + n[k]ň0 [k]
k=0
≈−
18
Z
∞
−∞
s(t)ř(t)dt ≈ Er sin ω0 θ
(34)
since n[k] and ň0 [k] are independent and have zero mean. The mean of A follows from
(
N
−1
X
E {A} = E Ts
)
2
r [k] + 2r[k]n0 [k] +
≈
n20 [k]
k=0
Z
∞
−∞
r2 (t)dt + Ts N σ 2 = Er + N Ts σ 2
(35)
For the variances of A and B we have
Var{B} = E{(B − µB )2 } = Ts2 E
Ts2 E
(N −1 N −1
X X
Ã
−1
NX
!2
s[k]ň0 [k] + n[k]ř[k] + n[k]ň0 [k]
k=0
=
s[k]ň0 [k]s[l]ň0 [l] + n[k]ř[k]n[l]ř[l] + n[k]ň0 [k]n[l]ň0 [l]+
k=0 l=0
2s[k]ň0 [k]n[l]ř[l] + 2s[k]ň0 [k]n[l]ň0 [l] + 2n[k]ř[k]n[l]ň0 [l]} =
µ
¶
Er 2
2 Er 2
2 2
Ts
σ +
σ + N σ σ = 2Er Ts σ 2 + N Ts2 σ 4
Ts
Ts
(36)
and
Ã
−1 ³
NX
Var{A} = E{(A − E{A})2 } = Ts2 E
Ts2 E
(N −1 N −1
X X
2r[k]n[k] + n2 [k] − σ 2
!2
´
k=0
=
4r[k]n[k]r[l]n[l] + n2 [k]n2 [l] + σ 4 +
k=0 l=0
o
4r[k]n[k]n2 [l] − 4r[k]n[k]σ 2 − 2n2 [k]σ 2 =
µ
¶
Ts2 4
Er 2
σ + (N 2 + 2N )σ 4 + N 2 σ 4 − 2N 2 σ 2 σ 2 = 4Er Ts σ 2 + 2N Ts2 σ 4
Ts
(37)
Here we have used the fourth moment of a zero-mean Gaussian stochastic variable
E{x4 } = 3σx4 , [15], giving us
E
(N −1 N −1
X X
)
n2 [k]n2 [l] = E
k=0 l=0
X
n2 [k]n2 [l] +
k6=l
2 2
X
n4 [k]
k=l
2
=
(N 2 − N )σ σ + N 3σ 4 = (N + 2N )σ 4
(38)
and with the third moment, E{x3 } = 0, [15],
E
(N −1 N −1
X X
k=0 l=0
)
n[k]n2 [l] = E
X
k6=l
19
n[k]n2 [l] +
X
k=l
n3 [k]
=0
(39)
References
[1] M. Abramowitz and I.A. Stegun, Eds, Handbook of mathematical functions with
formulas, graphs and mathematical tables, National Bureau of Standards Applied
Mathematics Series 55, U.S. Government Printing Office, Washington, DC.
[2] R.N. Bracewell, The Fourier transform and its applications, 2nd ed., New
York:McGraw-Hill, 1986.
[3] J.N. Bradley and R.L. Kirlin, ”Delay estimation by expected value”, IEEE Trans.
Acoust., Speech, Signal Processing, vol. 32, no. 1, pp. 19-27, 1984.
[4] R.E. Boucher and J.C. Hassab, ”Analysis of discrete implementation of generalized
cross correlator”, IEEE Trans. Acoust., Speech, Signal Processing, vol 29, no. 3, pp.
609-611, 1981.
[5] G.C. Carter, Ed., Coherence and time delay estimation, IEEE Press, New York,
1993.
[6] H. Dym and H.P. McKean, Fourier series and integrals, New York:Academic Press,
1972.
[7] H. Eriksson, Modelling of waveform deformation and time-of-flight estimation, Licentiate thesis, 1993:15L, Luleå University of Technology, May 1993.
[8] J.D. Fox, B.T. Khuri-Yakub and G.S. Kino, ”High-frequency acoustic wave measurements in air”, Proceedings of the IEEE 1983 Ultrasonics symposium, pp. 581-584,
Atlanta, USA.
[9] A. Grennberg and M. Sandell, ”Improved range resolution in imaging with narrowband airbourne ultrasound using a small reference reflector”, Submitted to EUSIPCO
-94.
[10] I.A. Hein and W.D. O’Brien, ”Current time-domain methods for assessing tissue
motion by analysis from reflected ultrasound echoes - A review”, IEEE Trans. Ultrason., Ferroelec., Freq. Contr., vol. 40, no. 2, pp. 84-102, 1993.
[11] G. Jacovitti and G. Scarano, ”Discrete time techniques for time delay estimation”,
IEEE Trans. Signal Processing, vol.41, no. 2, pp. 525-533, 1993.
[12] L.E. Kinsler, A.R. Frey, A.B. Coppens and J.V. Sanders, Fundamentals of acoustics,
Wiley, New York, 1980.
[13] G. Kossoff, ”Analysis of focusing action of spherically curved transducers”, Ultrasound in Med. and Biol., vol 5, pp. 359-65, 1979.
20
[14] R. Moddemeijer, ”On the determination of the position of extrema of sampled correlators”, IEEE Trans. Signal Processing, vol 39, no. 1, pp. 216-219, 1991.
[15] A. Papoulis, ”Probability, random variables and stochastic processes”, 2nd ed.,
Singapore:McGraw-Hill, 1984.
[16] N. Sundström, P.O. Börjesson, N.-G. Holmer, L. Olsson and H.W. Persson, ”Registration of surface structures using airborne focused ultrasound”, Ultrasound in Med.
and Biol., vol. 17, no. 5, 1991.
[17] H.L. van Trees, Detection, estimation and modulation theory, Part 1, USA:Wiley,
1968.
[18] A. Zeira and P.M. Schultheiss, ”Thresholds and related problems in time delay estimation”, In Proceedings of international conference on acoustics, speech and signal
processing, pp. 1261-1264, Toronto, Canada, May 1991.
21